
PERSON VERIFICATION BY FUSION OF PROSODIC, VOICE
SPECTRAL AND FACIAL PARAMETERS
Javier Hernando, Mireia Farrús, Pascual Ejarque, Ainara Garde, Jordi Luque
TALP Research Center, Department of Signal Theory and Communications
Technical University of Catalonia, Barcelona, Spain
Keywords: Biometrics, Multimodality, Fusion, Face, Prosody, Support Vector Machines, Matcher Weighting.
Abstract: Prosodic information can be used successfully for automatic speaker recognition, although most of the
speaker recognition systems use only short-term spectral features as voice information. In this work,
prosody information is added to a multimodal system based on face and voice characteristics in order to
improve the performance of the system. Fusion is carried out by using various fusion strategies and two
different fusion techniques: support vector machines and matcher weighting. Results are clearly improved
when a previous normalization based on histogram equalization is done before the fusion of the monomodal
scores.
1 INTRODUCTION
A multimodal biometric system involves the
combination of two or more human characteristics in
order to achieve better results than using monomodal
recognition (Bolle, Connell et al. 2004). When
several biometric traits are used in a multimodal
recognition system, fusion is possible at three
different levels: feature extraction level, matching
score level or decision level. Fusion at the matching
score level is usually preferred by most of the
systems, which is, in fact, a two-step process:
normalization and fusion itself (Indovina, Uludag et
al. 2003). Since monomodal scores are usually non-
homogeneous, the normalization process transforms
the different scores of each monomodal system into
a comparable range of values. One conventional
affine normalization technique is z-score, which
transforms the scores into a distribution with zero
mean and unitary variance. Histogram equalization
is another method whose purpose is to equalize the
statistics of two monomodal biometrics.
After normalization, the converted scores are
combined in the fusion process in order to obtain a
single multimodal score. In matcher weighting
fusion method, each monomodal score is weighted
by a factor proportional to the recognition result of
the biometric. One of the most currently used fusion
techniques is support vector machines (SVM). The
SVM algorithm constructs models that contain a
large class of neural nets, radial basis function nets
and polynomial classifiers as special cases. The
algorithm is simple enough to be analyzed
mathematically, since it can be shown to correspond
to a linear method in a high-dimensional feature
space non-linearly related to input space (Hearst
1998).
Prosody is mostly used to refer to speech
elements such as tone, rhythm and intensity. The
aim of this work is to add prosodic information to
the multimodal biometric recognition systems in
order to improve the performance of the system.
Prosodic, vocal tract spectral and facial scores are
fused by using two types of fusion, and different
fusion strategies are proposed: score level fusion is
carried in one, two or three steps, considering two
different combinations in the two-step fusion.
This paper is organized as follows. In the next
section the monomodal information sources used in
this work are described. The conventional
normalization method z-score and histogram
equalization are presented in section 3. Matcher
weighting fusion technique and support vector
machines are reviewed in section 4. Finally,
experimental results are shown in section 5 for the
fusion combinations of prosodic, vocal tract
spectrum and face scores.
17
Hernando J., Farrús M., Ejarque P., Garde A. and Luque J. (2006).
PERSON VERIFICATION BY FUSION OF PROSODIC, VOICE SPECTRAL AND FACIAL PARAMETERS.
In Proceedings of the International Conference on Security and Cryptography, pages 17-23
DOI: 10.5220/0002105200170023
Copyright
c
SciTePress

2 MONOMODAL SOURCES
2.1 Voice Information
2.1.1 Spectral Parameters
Spectral parameters are those which only take into
account the acoustic level of the signal, like spectral
magnitudes, formant frequencies, etc., and they are
more related to the physical traits of the speaker.
Cepstral coefficients are the usual way of
representing the short-time spectral envelope of a
speech frame in current speaker recognition systems.
These parameters are the most prevalent
representations of the speech signal and contain a
high degree of speaker specificity. The conventional
mel-cepstrum coefficients come from a set of mel-
scaled log filter bank energies (LFBE) S(k). The
sequence of cepstral coefficients is quasi-
uncorrelated and compact representation of speech
spectra. However, cepstral coefficients have some
disadvantages: they do not possess a clear and useful
physical meaning as LFBE have, they require a
linear transformation from either LFBE or the LPC
coefficients and in continuous observation Gaussian
density HMM with diagonal covariance matrices the
shape of the cepstral window has no effect so that
only its length . In order to overcome them, (Nadeu,
Mariño et al. 1996) presents an alternative that
consists of a simple linear processing on the LFBE
domain. The transformation of the sequence S(k) to
cepstral coefficients is avoided by filtering that
sequence. This operation is called frequency filtering
(FF) to denote that the convolution is performed in
the frequency domain.
2.1.2 Prosodic Parameters
Humans tend to use several linguistic levels of
information like lexical, prosodic or phonetic
features to recognize others with voice. Prosodic
parameters are called suprasegmental features since
the segments affected (syllables, words and phrases)
are larger than phonetic units. These features are
basically manifested as durations, tone and intensity
variation.
Although these features don’t provide very
good results when used alone, they give
complementary information and improve the results
when they are fused with vocal tract spectrum based
systems. Moreover, some of these features have the
advantage of being more robust to noise than the
low-level ones (Carey, Parris et al. 1996). Spectral
patterns can be affected by frequency features of the
transmission channel, and spectral information
depends also on the speech level and the distance
between the speaker and the array, while
fundamental frequency is unaffected by such
variations (Atal 1972). The prosodic recognition
system used in this task was constituted by a total of
9 prosodic features already used in (Peskin, Navratil
et al. 2003); i.e. three features related to word and
segmental durations: number of frames per word and
length of word-internal voiced and unvoiced
segments, and six more features related to pitch:
mean pitch, maximum pitch, minimum pitch, pitch
range, pitch “pseudo-slope” defined as (last F0 - first
F0)/(number of frames in word) and average slope
over all segments of piecewise linear stylization of
F0, all of them averaged over all words with voiced
frames.
2.2 Face Information
Facial recognition systems are based on the
conceptualization that a face can be represented as a
collection of sparsely distributed parts: eyes, nose,
cheeks, mouth, etc. Non-negative matrix
factorization (NMF), introduced in (Lee and Seung
2001), is an appearance-based face recognition
technique based on the conventional component
analysis techniques which does not use the
information about how the various facial images are
separated into different facial classes. The most
straightforward way in order to exploit discriminant
information in NMF is to try to discover
discriminant projections for the facial image vectors
after the projection. The face recognition scores used
in this work have been calculated in this way with
the NMF-faces method (Zafeiriou, Tefas et al.
2005), in which the final basis images are closer to
facial parts.
3 NORMALIZATION AND
HISTOGRAM EQUALIZATION
One of the most conventional normalization
methods is z-score (ZS), which normalizes the
global mean and variance of the scores of a
monomodal biometric. Denoting a raw matching
score as a from the set A of all the original
monomodal biometric scores, the z-score normalized
biometric x
ZS
is calculated according to
SECRYPT 2006 - INTERNATIONAL CONFERENCE ON SECURITY AND CRYPTOGRAPHY
18
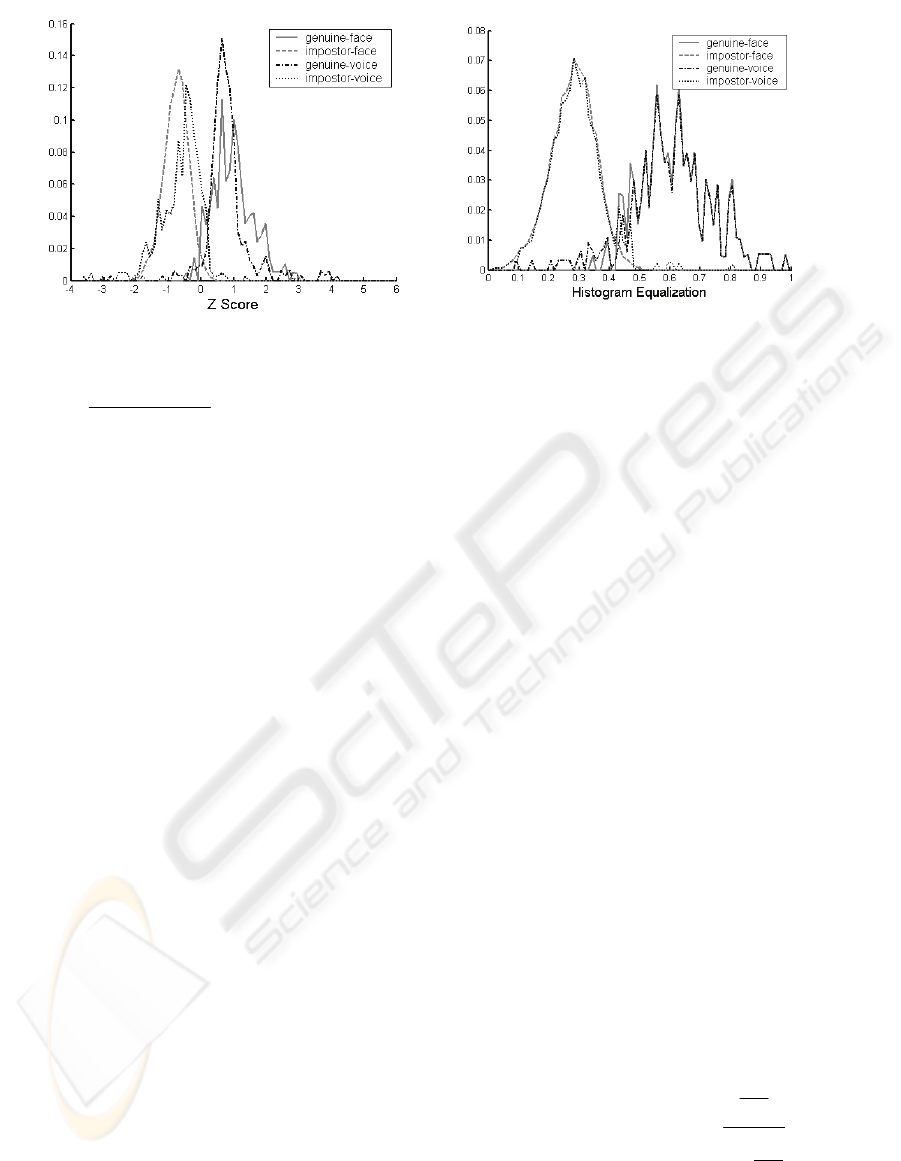
Figure 1: Scores distribution of face and speech biometrics after the presented normalizations.
()
()
ZS
ameanA
x
std A
−
= (1)
where mean(A) is the statistical mean of A and
std(A) is the standard deviation.
Multimodal variances are reduced when the
variances of the monomodal scores are similar.
Unfortunately, these variances are not usually
similar. In order to solve this problem and
equalization of the histograms of the monomodal
scores is proposed in this paper as a non affine
normalization process. Thus, the genuine and
impostor statistics and, consequently, the variances,
will probably be equalized.
Histogram equalization (HE) or cumulative
distribution function (CDF) equalization is a general
non parametric method to make the CDF of some
given data match to a reference distribution. HE is a
widely used non linear method designed for the
enhancement of images. HE employs a monotonic,
non linear mapping which re-assigns the intensity
values of pixels in the input image in order to
control the shape of the output image intensity
histogram to achieve a uniform distribution of
intensities or to highlight certain intensity levels
(Torre, Peinado et al. 2005).
CDF equalization method was mainly developed
for the speech recognition adaptation approaches or
for the correction of non linear effects typically
introduced by speech systems such as: microphones,
amplifiers, clipping and boosting circuits and
automatic gain control circuits. The principle of this
method is to find a non linear transformation to
reduce the mismatch of the statistics of two signals.
By means of the CDF a transformation that maps the
distribution of a signal back to the distribution of a
reference signal is defined.
In this work, the statistical matching technique
matches de CDF obtained from the speaker
verification scores and the CDF obtained from the
face verification scores, both evaluated over the
training data. The designed equalization takes as a
reference the histogram of the biometric with a
better accuracy, which is expected to have lower
separate variances, in order to obtain a bigger
variance reduction.
In figure 1 two histograms of face and voice
scores are plotted after the application of the
presented normalizations in order to compare the
transformations produced by each of them.
4 FUSION TECHNIQUES AND
SUPPORT VECTOR
MACHINES
In matcher weighting (MW) fusion, one of the most
conventional fusion techniques, each monomodal
score is weighted by a factor proportional to the
recognition rate, so that the weights for more
accurate matchers are higher than those of less
accurate matchers. When using the Equal Error
Rates (EER) the weighting factor for every
biometric is proportional to the inverse of its EER.
Denoting w
m
and e
m
the weighting factor and the
EER for the mth biometric x
m
and M the number of
biometrics, the fused score u is expressed as:
∑
=
=
M
m
mm
xwu
1
, where
∑
=
=
M
m
m
m
m
e
e
w
1
1
1
(2) (3)
A support vector machine (SVM) is a binary
classifier based on a learning fusion technique
(Cristianini and Shawe-Taylor 2000). Learning
occurrence
normalized scores
occurrence
normalized scores
PERSON VERIFICATION BY FUSION OF PROSODIC, VOICE SPECTRAL AND FACIAL PARAMETERS
19

based fusion can be treated as a pattern classification
problem in which the scores obtained with
individual classifiers are seen as input patterns to be
labelled as ‘accepted’ or ‘rejected’. Given a linearly
separable two-class training data, the aim is to find
an optimal hyperplane that splits input data in two
classes: 1 and -1 (the target values that correspond to
the ‘accepted’ and ‘rejected’ labels respectively)
maximizing the distance of the hyperplane to the
nearest data of each class. The optimal hyperplane is
then constructed in the feature space, creating a non
linear boundary in the input space.
5 RECOGNITION
EXPERIMENTS
In section 5.1 some preliminary experiments
involving face and speech multimodal identification
by using matcher weighting fusion are presented.
The prosody, vocal tract spectrum and face based
recognition systems used in our fusion experiments
are presented in section 5.2. Experimental results
obtained by using SVM and matcher weighting
fusion methods and combined according to three
different fusion strategies are shown in section 5.3.
5.1 Preliminary Experiments
In this section, the audio, video and multimodal
person identification experiments in the CLEAR’06
Evaluation Campaign (
http://www.clear-evaluation.org)
are presented. A set of audiovisual recordings of
seminars have been used, consisting of short video
sequences and matching far-field audio recordings.
For the acoustic speaker identification, 20
Frequency Filtering parameters were generated with
a frame size of 30ms and a shift of 10ms, and 20
corresponding delta and acceleration coefficients
were included. Gaussian Mixture Models (GMM)
with diagonal covariance matrices were used.
For the visual identification, a projection-based
technique was developed, which combines the
information of several images to perform the
recognition (Luque, Morros et al. 2006). Models for
all the users were created using segments of 15
seconds. The XM2VTS database was used as
training data for estimating the projection matrix.
For each test segment, the face images of the same
user were gathered into a group; then, for each
group, the system compared the images with the
person model.
Segments of different durations (1 and 5
seconds) corresponding to 26 personal identities
have been used for testing. Table 1 shows the correct
identification rates obtained for both audio and video
monomodalities and the fusion identification rate.
The identification results are clearly improved when
the multimodal fusion technique is used.
Table 1: Correct identification for both audio and video
systems and multimodal fusion.
Correct identification (%)
duration (s) Speech Video Fusion
1 75.0 20.2 76.8
5 89.3 21.4 92.0
5.2 Experimental Setup
A chimerical database has been created by relating
the speakers of the Switchboard-I speech database
(Godfrey, Holliman et al. 1990) to the faces of the
video and speech XM2VTS database (Lüttin, Maître
et al. 1998) of the University of Surrey. The
Switchboard-I database has been used for the
speaker recognition experiments. It is a collection of
2430 two-sided telephone conversations among 543
speakers (302 male, 241 female) from all areas of
the United States. Each conversation of the
Switchboard-I database contains two conversation
sides. For both recognition systems each speaker
model was trained with 8 conversation sides and
tested according to NIST’s 2001 Extended Data
task.
Speech scores have been obtained by using two
different systems: a voice spectrum based speaker
recognition system and a prosody based recognition
system. The spectrum based recognition system was
the same GMM system used in the preliminary
experiments and the UBM was a 32-component
Gaussian mixture model trained with 116
conversations.
In the prosody based recognition system a 9
prosodic feature vector was extracted for each
conversation side. Mean and standard deviation were
computed for each individual feature. The system
was tested with one conversation side, computing
the distance between the test feature vector and the k
feature vectors of the claimed speaker, using the k-
Nearest Neighbour method with k=3 and the
symmetrized Kullback-Leibler divergence.
XM2VTS database was used for the face
recognition experiments. It is a multimodal database
consisting of face images, video sequences and
speech recordings of 295 subjects. Only the face
images (four frontal face images per subject) were
used in our experiments. In order to evaluate
verification algorithms on the database, the
SECRYPT 2006 - INTERNATIONAL CONFERENCE ON SECURITY AND CRYPTOGRAPHY
20
evaluation protocol described in (Lüttin, Maître et al.
1998) was followed. The well-known Fisher
discriminant criterion was constructed as
(Belhumeur, Hespanha et al. 1997) in order to
discover discriminant linear projections and to
obtain the facial scores.
The fusion experiments combine the scores for
the users of all the recognition systems. A chimerical
database with 30661 users has been created by
combining 170 users of the Switchboard-I database
and 270 users of the XM2VTS database. A total of
46500 experiments were carried out.
5.3 Verification Results
Table 2 shows the EER obtained for each prosodic
feature used in the prosody based recognition
system. As it can be seen, features based on pitch
measurements achieve the best results.
Table 2: EER for each prosodic feature.
Features EER (%)
log(#frames/word) 30.3
length of word-internal voiced segments 31.5
length of word-internal unvoiced segments 31.5
log(mean F0) 19.2
log(max F0) 21.3
log(min F0) 21.5
log(range F0) 26.6
pitch “pseudo slope” 38.3
slope over PWL stylization of F0 28.7
The EER obtained in each monomodal
recognition system, in the fusion of prosodic and
voice spectral scores and in the fusion of spectral
and facial scores when using SVM and MW
methods are shown in table 3.
Table 3: EER for monomodal and bimodal systems.
EER (%)
Source
SVM ZS-MW
Prosody 14.65 15.66
Voice
spect.
10.10
6.84 7.44
Face 2.06
0.99
1.83
Note that fusion was only used in the
monomodal prosodic system, where 9 different
prosodic scores where fused, and in both bimodal
systems. No fusion was involved in the monomodal
voice spectral and facial recognition systems. It can
be seen that the performance of MW fusion is
slightly worse that the SVM.
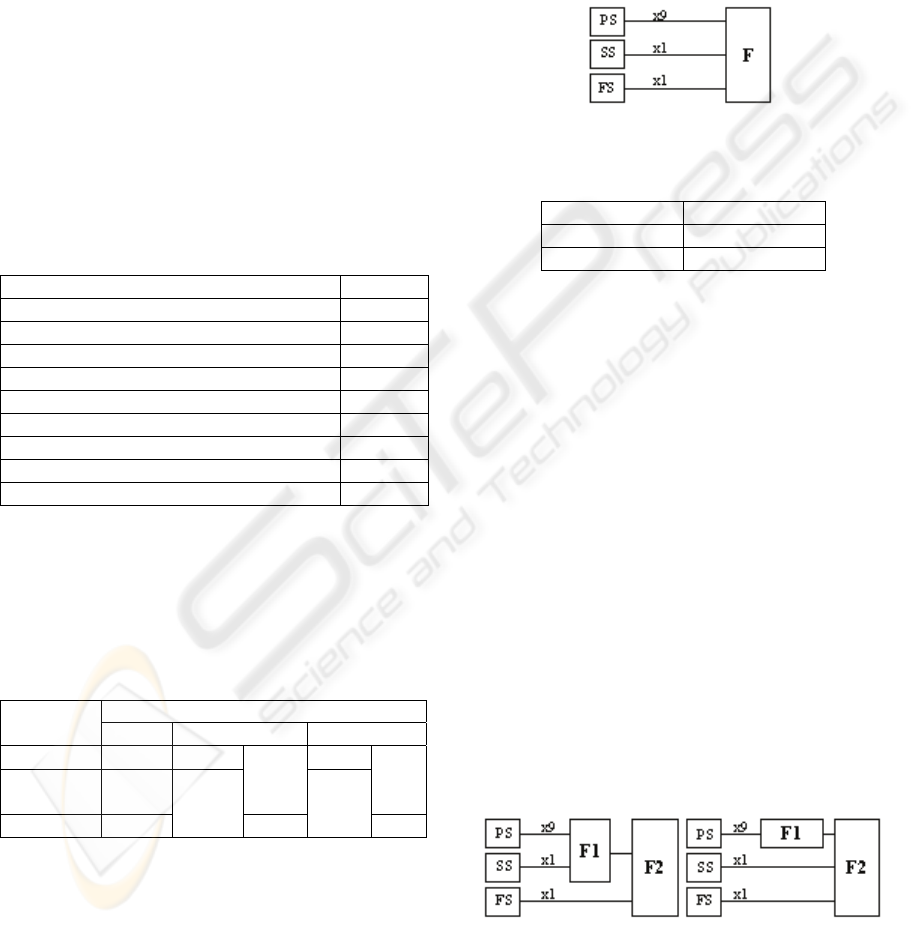
5.3.1 One-step Fusion
One-step fusion (figure 2) consists in fusing at once
all the scores obtained from the 11 extracted
features: prosodic scores (PS) obtained from 9
prosodic parameters, voice spectral scores (SS)
obtained from spectral parameters and face scores
(FS) obtained from image face parameters. The EER
obtained for both types of fusion (SVM and MW
with ZS normalization) are shown in table 4.
Figure 2: One-step fusion.
Table 4: EER for one-step fusion.
F EER (%)
SVM 0.840
ZS-MW 1.320
The results show, once again, that SVM
technique outperforms the conventional MW method
wit ZS normalization. Furthermore, by using
prosodic features the results of the bimodal voice
spectrum and face recognition system are clearly
improved.
5.3.2 Two-step Fusion
Two-step fusion consists in fusing all the scores
obtained from the 11 parameters in two consecutive
steps. In this kind of fusion two different
configurations have been considered (figure 3). In
the first configuration (config. A) the scores of all
the speech features (9 prosodic features and 1
spectral feature) are previously fused and the
obtained results are then fused again with the facial
scores. In the second configuration (config. B) the
scores of the 9 prosodic features are previously
fused and the obtained results are then fused again
with voice spectral and facial scores.
Configuration A Configuration B
Figure 3: Two configurations of two-step fusion.
Table 5 shows the EER for both configurations
of the proposed two-step fusion. It can be seen that
PERSON VERIFICATION BY FUSION OF PROSODIC, VOICE SPECTRAL AND FACIAL PARAMETERS
21
SVM outperforms, once again, the conventional ZS
technique.
Table 5: EER (%) for two-step fusion.
F1 F2 Config. A Config. B
SVM SVM 0.987 0.647
ZS-MW ZS-MW 2.054 1.493
SVM ZS-MW 1.583 1.303
ZS-MW SVM 1.880 0.785
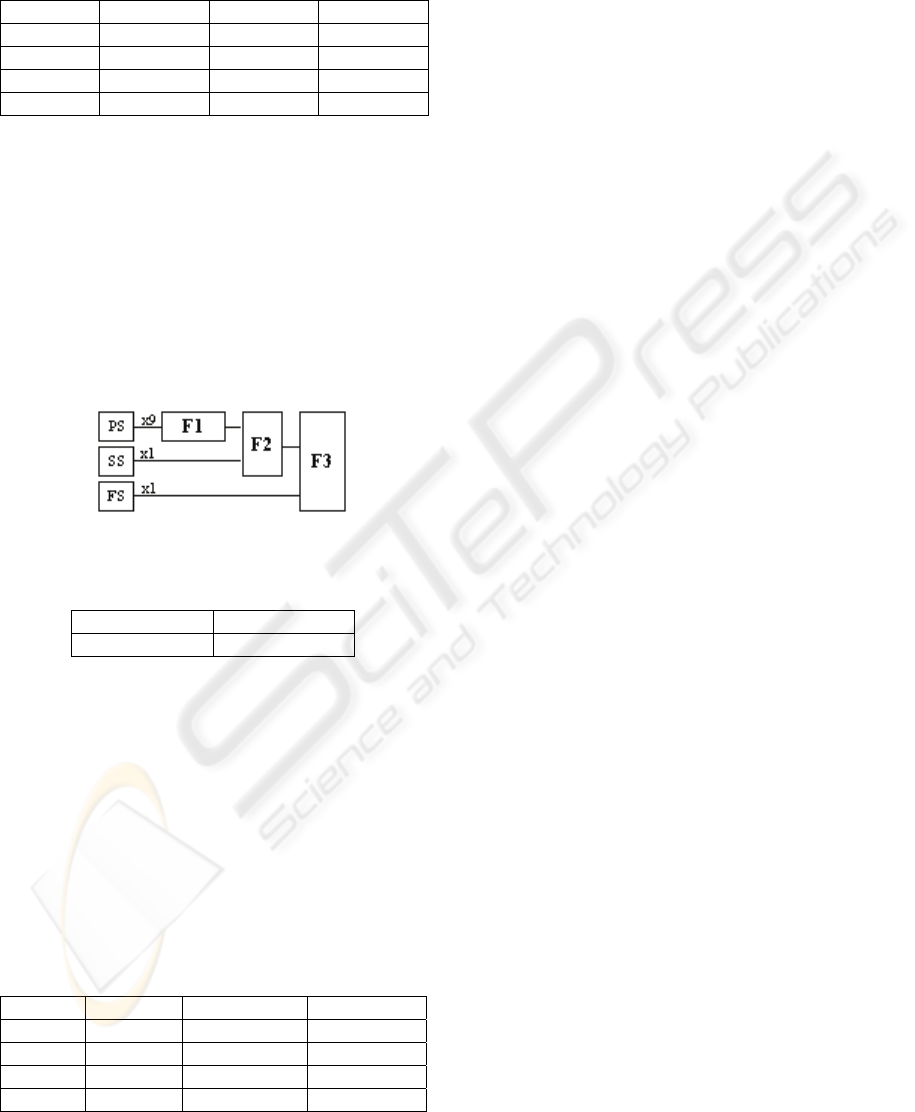
5.3.3 Three-step Fusion
Since the previous tables show that the best results
are achieved by SVM fusion, another possibility is
now considered: a three-step fusion with SVM. First
of all, scores related to the 9 prosodic features are
fused by SVM. The obtained results are then fused
with voice spectral scores, and the new results are,
once again, fused with the facial scores, as it can be
seen in figure 4. EER for three-step SVM fusion are
shown in table 6.
Figure 4: Three-step fusion.
Table 6: EER for three-step fusion.
F1, F2, F3 EER (%)
SVM 0.868
5.3.4 Histogram Equalization
In order to analyze how the fusion process is
influenced by a previous histogram equalization of
the scores, this normalization method is applied to
the fusion strategy where the best results were
achieved, i.e. configuration B in the two-step fusion.
In table 7 the results obtained with equalized and
non equalized scores are compared. It can be clearly
seen that the results are always improved when
histogram equalization is previously applied.
Table 7: EER (%) with equalized and non equalized scores
in the best fusion strategy.
F1 F2 non equalized equalized
SVM SVM 0.647 0.630
ZS-MW ZS-MW 1.493 0.987
SVM ZS-MW 1.303 0.886
ZS-MW SVM 0.785 0.774
6 CONCLUSIONS
The performance of a bimodal system based on
facial and spectral information is clearly improved in
this work when prosodic information is added to the
system. In our experiments the use of SVM
outperforms the results obtained by fusion with the
matcher weighting technique. The way how the
scores are fused is relevant for the performance of
the system. The best results have been obtained
when prosodic scores are previously fused and the
resulting scores are fused at once with spectral and
face scores. Furthermore, a previous histogram
equalization as a normalization technique improves
the results obtained with non equalized scores. It has
also been observed that a previous fusion of the
voice information (spectral and prosodic scores)
does not contribute to the improvement of the
system.
ACKNOWLEDGEMENTS
The authors would like to thank A. Temko for his
helpful discussions on the fusion techniques used in
this work, and Dr. A. Tefas, who has provided the
face recognition scores.
This work has been partially supported by the
European Union (under CHIL IST-2002-506909 and
BIOSEC IST-2002-001766) and by the Spanish
Government (under ACESCA project TIN2005-
08852 and grant AP2003-3598).
REFERENCES
http://www.clear-evaluation.org/
Atal, B. S. (1972). "Automatic speaker recognition based
on pitch contours." Journal of the Acoustical Society
of America 52: 1687-1697.
Belhumeur, P. N., J. P. Hespanha, et al. (1997).
"Eigenfaces vs. Fisherfaces: Recognition using class
specific linear projection." IEEE Transactions on
Pattern Analysis and Machine Intelligence 19(7): 711-
720.
Bolle, R. M., J. H. Connell, et al. (2004). Guide to
Biometrics. New York, Springer.
Carey, M. J., E. S. Parris, et al. (1996). Robust prosodic
features for speaker identification. ICSLP,
Philadelphia.
Cristianini, N. and J. Shawe-Taylor (2000). An
introduction to support vector machines (and other
kernel-based learning methods), Cambridge University
Press.
SECRYPT 2006 - INTERNATIONAL CONFERENCE ON SECURITY AND CRYPTOGRAPHY
22

Godfrey, J. J., E. C. Holliman, et al. (1990). Switchboard:
Telephone speech corpus for research and
development. ICASSP.
Hearst, M. A. (1998). "Trends and Controversies: Support
Vector Machines." IEEE Intelligent Systems 13: 18-
28.
Indovina, M., U. Uludag, et al. (2003). Multimodal
Biometric Authentication Methods: A COTS
Approach. MMUA, Workshop on Multimodal User
Authentication, Santa Barbara, CA.
Lee, D. D. and H. S. Seung (2001). Algorithms for non-
negative matrix factorization. Advances in Neural
Information Processing Systems: Proceedings of the
2000 Conference, MIT Press.
Luque, J., R. Morros, et al. (2006). Audio, video and
multimodal person identification in a smart room.
CLEAR 06 Workshop, Southampton.
Lüttin, J., G. Maître, et al. (1998). Evaluation Protocol for
the Extended M2VTS Database (XM2VTSDB).
Martigny, Switzerland, IDIAP.
Nadeu, C., J. B. Mariño, et al. (1996). Frequency and
time-filtering of filter-bank energies for HMM speech
recognition. ICSLP.
Peskin, B., J. Navratil, et al. (2003). Using prosodic and
conversational features for high-performance speaker
recognition: Report from JHU WS'02. ICASSP.
Torre, Á. d. l., A. M. Peinado, et al. (2005). "Histogram
Equalization of Speech Representation for Robust
Speech Recognition." IEEE Transactions on Speech
and Audio Processing 13(3): 355-366.
Zafeiriou, S., A. Tefas, et al. (2005). Discriminant NMF-
faces for frontal face verification. IEEE International
Workshop on Machine Learning for Signal
Processing, Mystic, Connecticut.
PERSON VERIFICATION BY FUSION OF PROSODIC, VOICE SPECTRAL AND FACIAL PARAMETERS
23
