
PERFORMANCE MEASUREMENT OF CAR-TO-CAR AD-HOC
NETWORKS IN THE REAL WORLD ¹
Taehwan Kim, Woojin Han, Jinhyuk Lee, Dowon Hyun and Juwook Jang
Dept. of Electronic Engineering Sogang University Shinsu-dong Mapo-gu, Seoul, Korea 121-742
Keywords: Ad-hoc networks, Car-to-car networks, Inter-vehicle Communications, Wireless LAN.
Abstract: This paper shows the performance of car-to-car ad-hoc networks in the real world. Actually there are many
irregular driving environments, so we have established some scenarios about inter-vehicle communications
can happen in our actual life. And we have measured the transmission characteristics such as throughput,
delay and packet loss rate of the system for each case. We have installed laptops with IEEE 802.11b
wireless LAN and software for the ad-hoc network and packet transmission at each car. A test-bed has been
implemented to support TCP/UDP packet transmission on wireless ad-hoc environment such as AODV
(Ad-hoc On Demand Distance Vector) and OLSR (Optimized Link State Routing). Scenarios we have used
in this experiment present which algorithm of ad-hoc routing and transmission is suitable in real driving
environment and how performance metrics change according to different circumstances.
1 INTRODUCTION
For next generation vehicles, inter-vehicle
communication is necessary. Car-to-car network is
very dynamic from the point of view of mobility.
Moreover, because the inter-vehicle networks must
be wireless new telematics protocols and
applications should be developed in a different
manner compared with other wired network
protocols. For this reason, many telematics
companies try to develop the wireless network
system that is efficient and stable.
We have researched about wireless network for
next generation vehicles, too. As measuring
performance metrics such as throughput, delay, and
packet loss rate in the environment of dynamic car-
to-car networks, we can get information as follows –
first, what routing and transmission protocol is
suitable for next generation vehicles and second,
how performance metrics change according to
different circumstances.
Many researches about our subject have been
achieved by other researchers in past years, however
there are few studies that measure performance
metrics in the real world. Most of studies provide
results by not actual measurement but virtual
simulation. For the actual measurement, we have
implemented test-bed with OSI 7 layer components
using hardware and software.
First of all, as preparing laptop with 802.11b LAN,
we could meet requirements for physical layer and
link layer. And then we have used software to satisfy
the conditions of network layer, transport layer, and
application layer – session layer and presentation
layer, too. Especially, we have installed software
make nodes communicate by ad-hoc routing using
the protocol such as AODV (PERKINS 1999) and
OLSR (LAOUITI 2001). We have just used these
programs to implement our test-bed (AODV for
Windows and olsr-0.4.9). But we have developed a
unique program, the throughput measurement
program, used to send and receive packets and to
estimate throughput of the network. The throughput
measurement program is composed of two parts –
packet sender and packet receiver, and they have
ability to adjust packet generate frequency, size of a
packet, and transmission protocol like TCP or UDP.
_
_________________
1 This paper is supported by Seoul R&BD Program (10561)
79
Kim T., Han W., Lee J., Hyun D. and Jang J. (2006).
PERFORMANCE MEASUREMENT OF CAR-TO-CAR AD-HOC NETWORKS IN THE REAL WORLD.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 79-85
Copyright
c
SciTePress
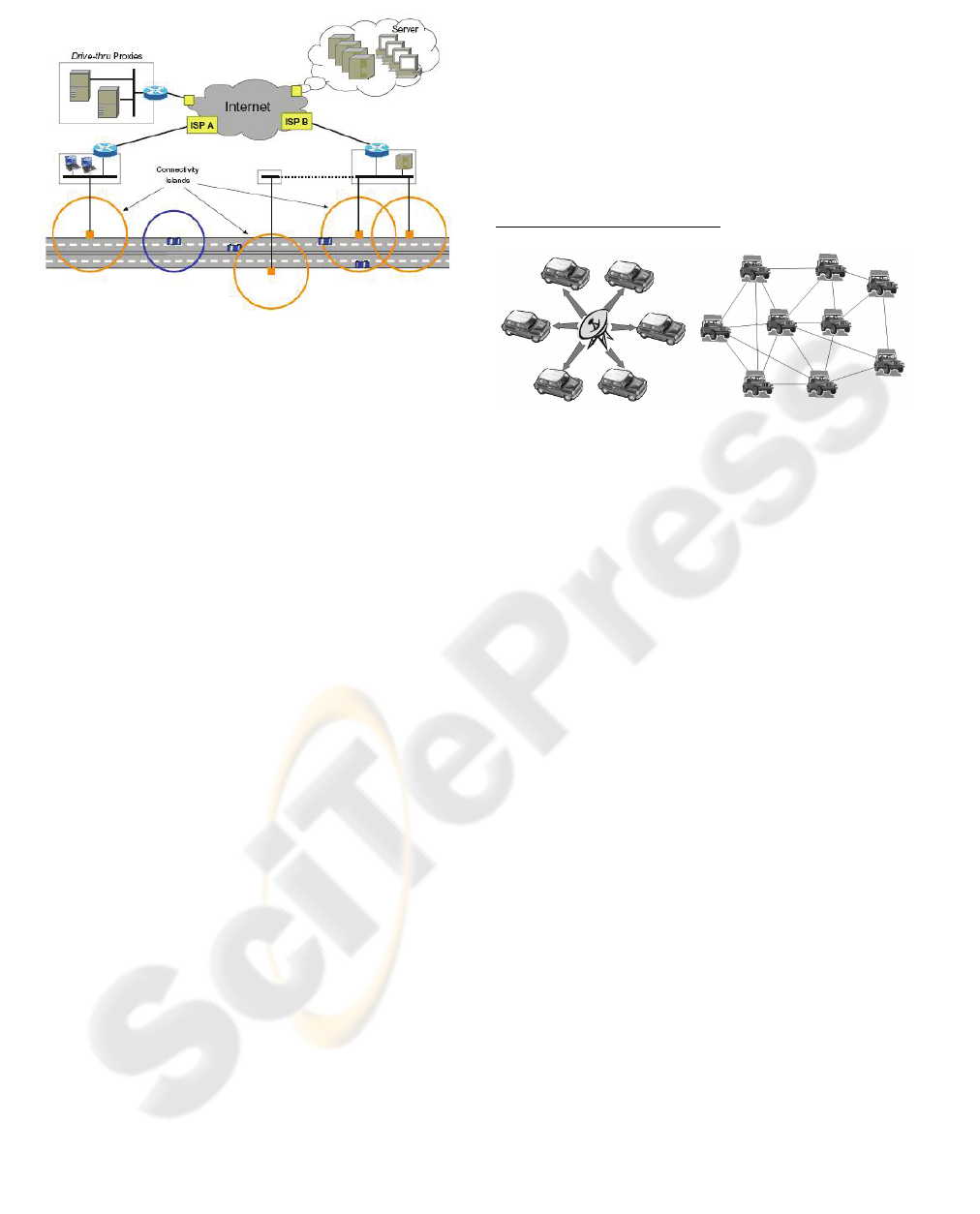
Figure 1: Architecture Overview of "Drive-thru" Internet.
The focus of our test-bed is to research the influence
of natural driving conditions that can happen in the
real world on the performance of car-to-car network.
It is clear that the results of our experiments are very
helpful to many developers who try to make more
practical inter-vehicle application program or
hardware.
The rest of this paper is organized as follows.
Section 2 describe the related work and elaborates
our contribution. In section 3, we discuss car-to-car
communication and some limitations of previous
works. Section 4 gives a brief description of the test-
bed we have implemented, and scenarios we have
used are shown in section 5. Section 6 displays
results achieved by the experiment. Finally, in
section 7, we conclude this paper confirming the
suitability of WLAN-based access technologies for
the vehicle network using Ad-hoc and pointing out
next steps in our research.
2 RELATED WORK
There are many trials to get information about the
performance of network in the car. Recently,
research about the “Drive-thru” Architecture by
University Bremen has been done (OTT 2004). This
study is about usage of internet in the car through
infrastructure like access points on the road. Figure 1
shows the architecture of “Drive-thru” internet. And
the study named “IMPORTANT (Impact of
Mobility on Performance of RouTing protocols for
Adhoc NeTworks)” is also the research about car-
network (BAI 2003).
However, the researches as stated above have
limitations. In the study “Drive-thru” internet, there
is of infrastructure for network between cars.
Besides, cars must be in the range of access point
installed on the road simultaneously to communicate
each other. And because study named
“IMORTANT” is by virtual simulation, the
environment and result can be different from those
of research in the real world.
3 BACKGROUND
Inter-vehicle communication
Figure 2: The current network using access point versus
ad-hoc network without access point.
Inter-vehicle communication can be used to
facilitate applications improving driving safety and
convenience. Potential uses of such applications are
dynamic traffic routing, driver assistance and
navigation, entertainment, co-operative driving, etc.
The existing ad-hoc networking infrastructure can be
leveraged and performance enhancement measures
can be innovated for provisioning seamless inter-
vehicle communication. As opposed to centralized
service, and ad-hoc network is much better suited for
vehicle-related applications that exchange data
having local relevance. The existing 802.11
compliant devices can be used for providing wireless
connectivity between moving vehicles. With the
advent of 802.11a hardware, bandwidths of up to 54
Mbps have become realizable. However, Vehicular
traffic scenarios pose greater challenges than the
indoor WLAN applications, due to associated
driving speeds, varying vehicular traffic patterns and
driving environments. Performance measurements
for 802.11 based wireless LANs have been done in
indoor office and industrial environment. These
results do not provide performance indication for the
more challenging vehicular scenarios. Through the
test we conduct, we investigate the performance
achievable by an 802.11b-based WLAN in vehicular
scenarios.
There are two types of inter-vehicle communication
network using Ad-hoc (Figure 2). One is Inter-
vehicle communication supported by AP (Access
Point), which has been discussed. However, this
approach is not cost-effective. It requires
development of exclusive infrastructure. Access
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
80

Figure 3: Hardware for test-bed.
points may be provided at each street corner, co-
located with traffic lights, or emergency phones, be
placed in parking lots or in rest areas or may be co-
located with gas stations or other shops in service
areas. The other is inter-vehicle communication
supported by ad-hoc routing algorithm (SINGH
2002). In this approach, it is important that each
mobile node can detect other's position and routing
path continuously.
In this paper, we focus on plain WLAN
connectivity and transport protocol behaviour-and
only briefly address implications on applications in
the end. Our goal is to prove that WLAN technology
is capable of enabling the vehicle network using ad-
hoc in the first place and to document the
communication characteristics we have observed
with different measurement configurations using
UDP and TCP as standard transport protocols. After
simulation and measurement of transport protocol in
ad-hoc mode, we describe the multi-hop mobile
vehicular test-bed, our design decisions and driving
experiences
4 TEST-BED IMPLEMENTATION
We have implemented a test-bed to measure the
performance of wireless ad-hoc network and to get
knowledge about the influences of driving
environment upon the state of network. Because the
test-bed has not only hardware but also software, we
could implement the network system with entire
components of OSI 7 layers.
4.1 Hardware
We have used the cars with laptop as shown in
(a)
(b)
Figure 4: Software for test-bed (a) Packet Sender, (b)
Packet Receiver.
Figure 3. Because range that can be covered by
802.11b WLAN card we have used is only about
10m, we have equipped the PCMCIA card with an
external antenna that has been placed at the right
hand side of the vehicles. By the experiments for
reference we have done before the planned
measurement, we have already know that the range
of PCMCIA card with an external antenna come
close to about 100m. Owing to the external antenna,
we could perform experiment without limitation on
range of electric wave.
4.2 Software
We have installed software for wireless ad-hoc
routing and sending and receiving packets. The
program for ad-hoc is not developed by us, we have
used only. However we have developed unique
program for sending and receiving packets – the
name of this program is Throughput Measurement
Program.
As shown in Figure 4. The Throughput
Measurement Program consists of two parts – Packet
Sender and Packet Receiver. Figure 4(a) describes
the Packet Sender and Figure 4(b) describes the
Packet Receiver and their functions.
5 SCENARIOS
Most important point of this study is that
experiments have been done under the driving
environment in the real world. But there are lots of
situations that can be happen in our real life. So we
have established some scenarios treated as important.
Basically, we have used 3 cars for these experiments,
and cars can participate ad-hoc routing and network.
These 3 cars run in order of source node (S) - relay
PERFORMANCE MEASUREMENT OF CAR-TO-CAR AD-HOC NETWORKS IN THE REAL WORLD
81
node (R) - destination node (D) in a line, and source
node sends packets to destination packet through
TCP or UDP protocol.
5.1 Variable Distance and Velocity
Our first scenario is changing distance between cars
and velocity of cars. Because the environment of
network is wireless ad-hoc with limitation of range,
distance and velocity are very important variables.
We have changed the distance between each car
from 30m to 70m, and velocity of each car from
30km/h to 70km/h
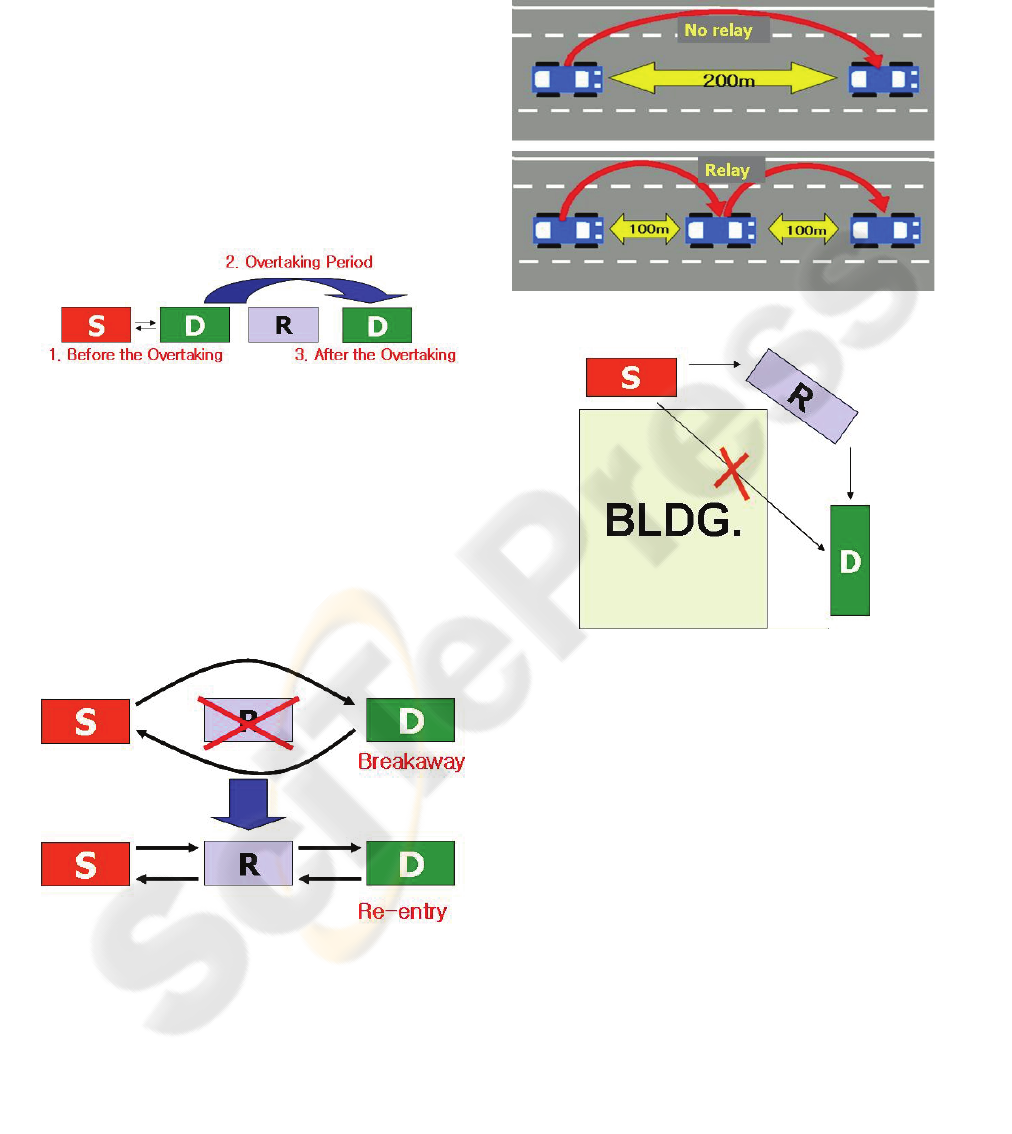
5.2 Overtaking
Figure 5: Scenario description about the overtaking.
When many cars run on the road, a lot of situation
can happen. Second case we have assumed is seen in
Figure 5. At the beginning of experiment, a
destination node (D) and a source node (S) run in a
line. After a few seconds, node D overtake the car
were running ahead of node D, and these 3 cars run
in order for several seconds.
5.3 Breakaway and Re-entry
Figure 6: Scenario description about the breakaway and
re-entry.
Figure 6 shows third scenario of us. Like the
preceding scenario, 3 cars run in order, S-R-D, as
source sends packets to destination. After some time
from the beginning of communication, an
experimenter disables the LAN of node R. And after
some time again, the experimenter turn the LAN of
node R on. We set the interval between each state
for 15 seconds.
5.4 The Relay Effect
Figure 7: The relay effect experiment 1.
Figure 8: The relay effect experiment 2.
This scenario has two parts of experiments. First, on
one line of the road, we have compared with S-D
communication and S-R-D communication. That is,
performance of network with relay node and without
relay node is compared. Figure 7 shows this scenario.
In this case, we have kept all of the cars being stop,
and set distance between each car 50m.
Secondarily, because we have used wireless LAN,
we have chosen the scenario that can show
influences of any obstacles such as walls, trees, and
buildings. As shown in Figure 8, we set up the
environment that the tall building block the electric
wave between node S and node D. The main
purpose of this example is to know how many
influences relay node give to the wireless ad-hoc
network.
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
82
6 MEASUREMENT
We have measured performances such as throughput,
delay, packet loss rate in each case abovementioned.
For the transport protocol, TCP and UDP have be
used, and AODV and OLSR have be used for the ad-
hoc routing protocol. But because the case of OLSR
displays more efficient performance than the case of
AODV, we present the results gotten by OLSR only.
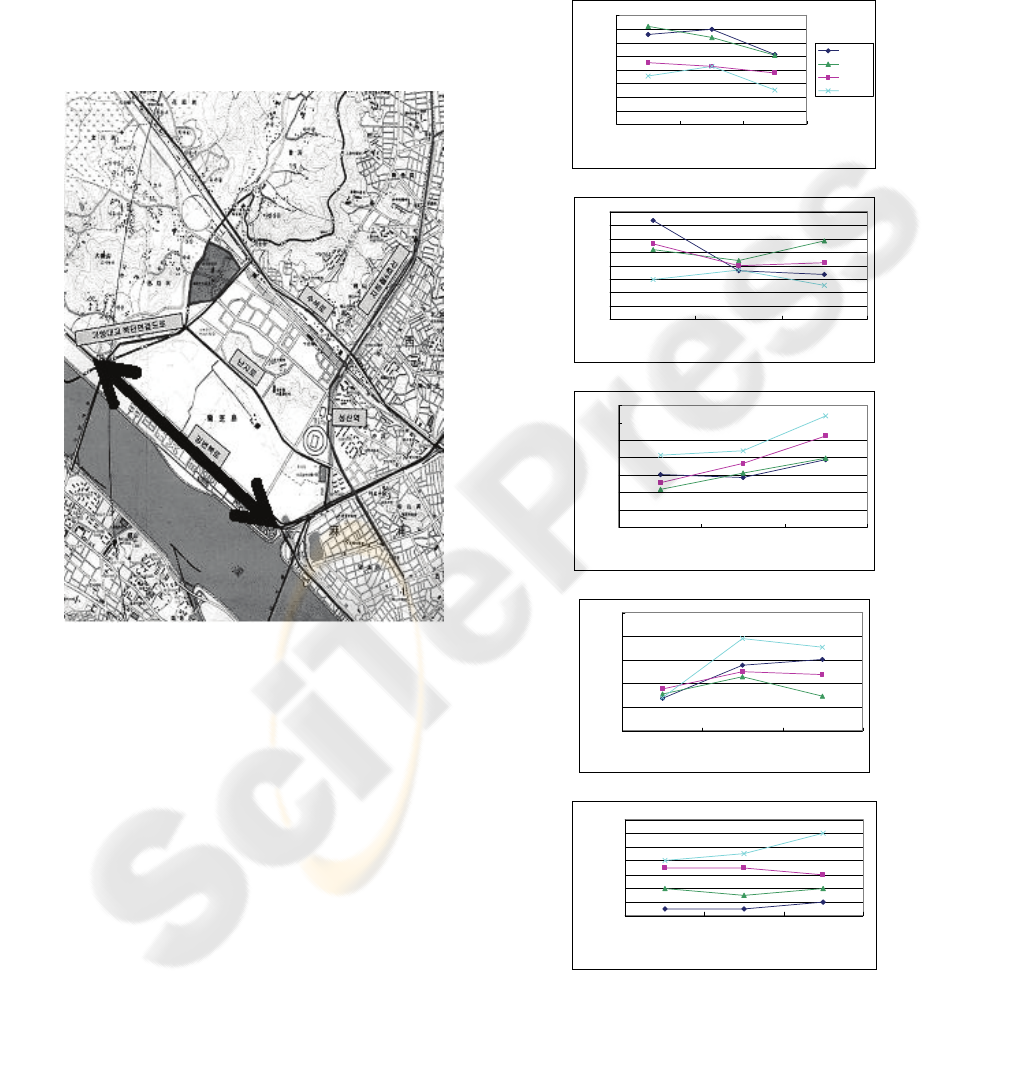
Figure 9 shows the map the experiments were
accomplished.
Figure 9: Map of the road the experiments were
accomplished.
At the first, we have measured transmission
characteristics such as throughput, delay and packet
loss rate as change the distance between cars and
velocity of cars. Figure 10 shows the results of the
experiments related to distance and velocity. Figure
10(a) and Figure 10(b) display the result of
throughput. According to the results, basically, the
effect by velocity is more remarkable than by
distance. The reason of these results is by
characteristic of 802.11. 802.11 send RTS (Request
to Send) and CTS (Clear to Send) before sending the
main data to make the most suitable condition of
data transmission. If the vehicles speed up, optimal
conditions change, so, the difference of performance
is notable. The phenomenon like this is seen in the
result about the delay and the packet loss rate as
shown in Figure 10(c) through Figure 10(e). By the
way, as we can see through Figure 10, UDP make
system more efficient than TCP. This is because
UDP does not have the process of dividing the
message into packets by one end point and re-
assembling divided packets into a message by the
other.
0
0.5
1
1.5
2
2.5
3
3.5
4
30 50 70
Dis tanc e
(
m
)
Throug hput(Mbps
0km/ h
30km/ h
50km/ h
70km/ h
(a) Throughput - TCP
0
1
2
3
4
5
6
7
8
30 50 70
Distance
(
m
)
Thoughput(Mbps
(b) Throughput - UDP
0
50
100
150
200
250
300
350
30 50 70
Distance
(
m
)
Delay ( ms)
(c) Delay - TCP
0
50
100
150
200
250
30 50 70
Distance
(
m
)
Delay ( ms)
(d) Delay - UDP
0
2
4
6
8
10
12
14
30 50 70
Distance
(
m
)
Number of Lost Packets
(e) Number of lost packets – UDP
Figure 10: Results of experiment for various distance and
velocity.
PERFORMANCE MEASUREMENT OF CAR-TO-CAR AD-HOC NETWORKS IN THE REAL WORLD
83
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
(Before
overtaking)
(Overtaking
peroid)
(After overtaking)
Thro ughp ut(Mb ps)
TCP
UDP
(a)
0
20
40
60
80
100
120
140
160
180
200
(Before
overtaking)
(Overtaking
peroid)
(After overtaking)
Delay(ms)
(b)
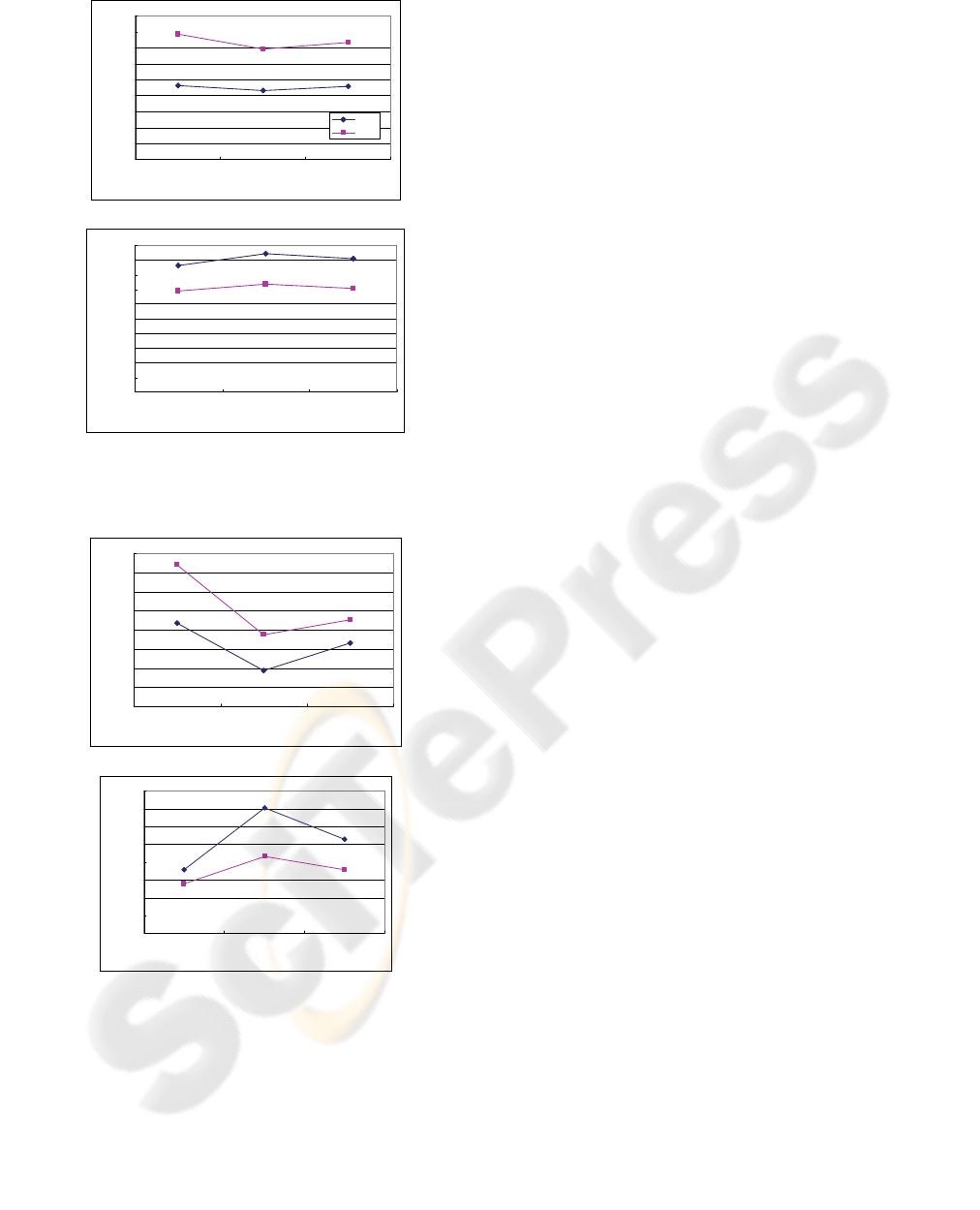
Figure 11: Results of experiments about the overtaking (a)
Throughput, (b)Delay.
0
0.5
1
1.5
2
2.5
3
3.5
4
(Before
breakaway)
(After breakaway) (After re-entry)
Thro ughp ut(Mbps)
(a)
0
50
100
150
200
250
300
350
400
(Before
breakaway)
(After
breakaway)
(After re- entry )
Delay(ms)
(b)
Figure 12: Results of experiments about the breakaway
and re-entry (a)Throughput, (b)Delay.
Section 5.2 describes a scenario about the
overtaking, and Figure 11 shows the results of this.
We can discover that the performance in the
overtaking period goes down compared with before
and after the overtaking. This result is by the sudden
increase in velocity of vehicle pass ahead. The
influence of velocity is seen in a previous
experiment and the result.
Figure 12 displays the results by the
experiment performed according to our third
scenario – breakaway and re-entry. In this case,
efficiency of the network after the breakaway of
relay node is worst. This is because this after-
breakaway-period (before re-entry) is the stage each
node reset the ad-hoc routing table and relay node
does not exist. And after re-entry of the node broken
away from the network, the system could not
recover the performance of before-breakaway-period
because the need of processing time to reset the
routing table.
Lastly, experiments for get information about
the role of the relay node produce results shown in
Table 1 and Table 2. As we can show, when the
relay node exists, the performance is more efficient.
Especially, the case that a building disturbs the
communication between source and destination node
produces remarkable results, because the
communication is impossible under the environment
without the relay node. But if the relay node is
placed at the edge of the building, the destination
node can receive packets sent by the source node.
7 CONCLUSION
In this paper, we present a test-bed for wireless ad-
hoc network for car-to-car communication. Due to
the test-bed we have implemented, we could get
results of the experiment designed to know the
influences of driving environment on the
performance of the inter-vehicle network. The core
of this paper is that all of the experiments and
measurements are accomplished in the real world,
not in the virtual world by simulation.
Because of inter-vehicle ad-hoc network have
to use the wireless LAN with limitation of
bandwidth, more efficient routing and transmission
protocols are necessary. So, our study to measure the
performance of wireless network on the various
environments has meaning. But there are more
limitations yet. We would like to investigate into this
issue further in the future and improve this limitation
of MANET over vehicles.
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
84
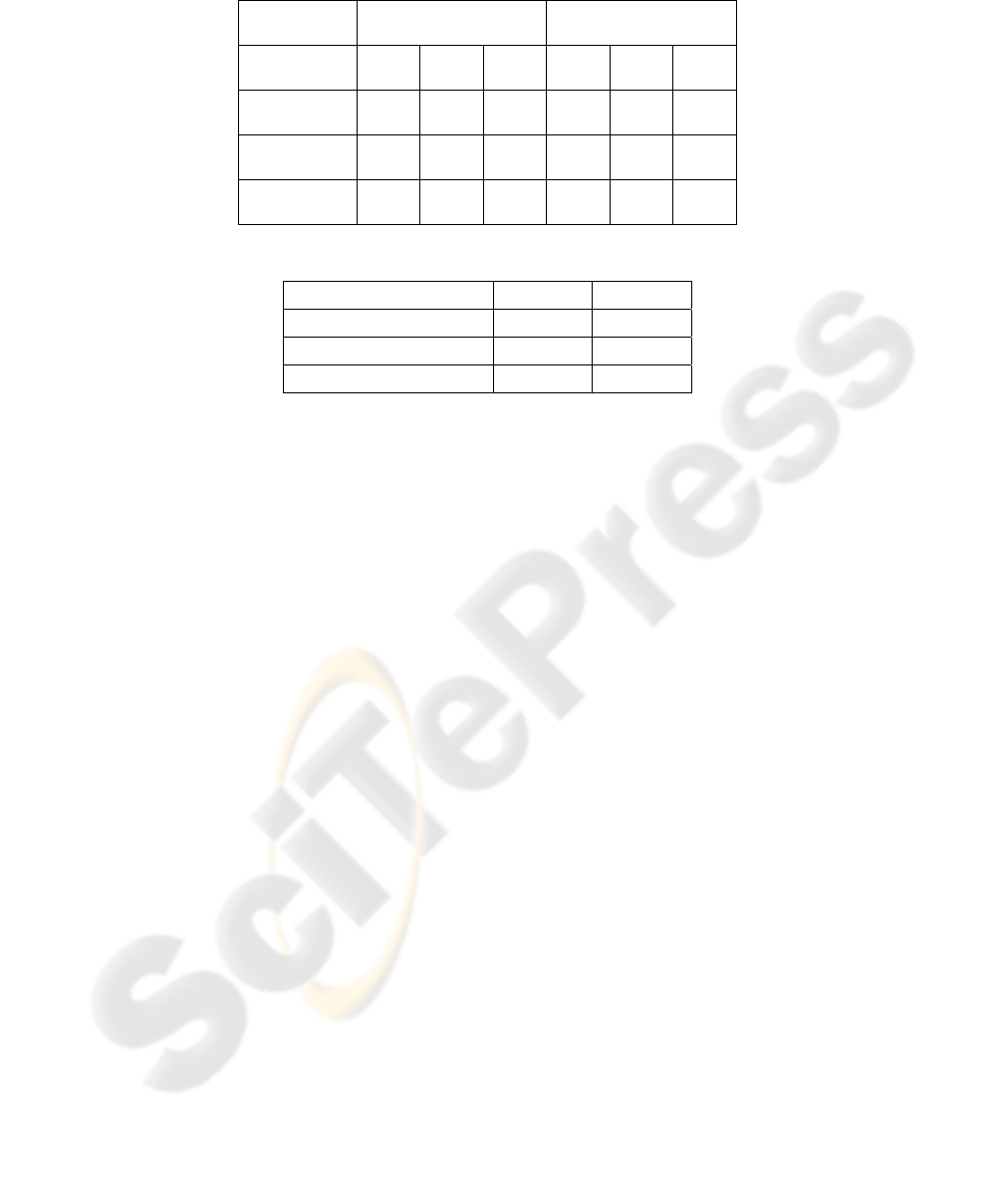
Table 1: Results of experiments about the relay effect 1.
Transmission
Protocol
TCP UDP
Relay O X
Rise
Rate
O X
Rise
Rate
Throughput
(Mbps)
1.2 1.36 13% 1.03 2.1 104%
Average
Delay(ms)
214 187 14% 165 80 106%
Packet Loss
Rate(%)
6 3 100%
Table 2: Results of experiments about the relay effect 2.
Transmission Protocol TCP UDP
Throughput(Mbps) 2.84 3.45
Average Delay(ms) 216 145
Packet Loss Rate(%) ㅡ 1
REFERENCES
Perkins, C. E. and Royer, E. M., 1999, Ad-hoc On-
Demand Distance Vector (AODV) Routing. In wmcsa
2nd IEEE Workshop on Mobile Computer Systems and
Applications, 90.
Laouiti, A., Muhlethaler, P., Clausen, T. and Jacquet, P.,
1999, Optimized Link State Routing Protocol. In IEEE
INMIC, Pakistan.
AODV for Windows, Available from : http://moment.
cs.ucsb.edu/AODV/aodv-windows.html
olsr-0.4.9, Available from: http://seattlewireless.net/
OlsrExperiments
Ott, J. and Kutscher, D., 2004, Drive-thru Internet: IEEE
802.11b for “Automobile” Users. In IEEE
INFOCOMM 2004.
Ott, J. and Kutscher, D., 2004, The “Drive-thru”
Architecture: WLAN-based Internet Access on the
Road. In IEEE VTC 2004.
Bai, F., Sadagopan, N. and Helmy, A., 2003,
IMPORTANT: A frame work to systematically
analyze the Impact of Mobility on Performance
RouTing protocols for Adhoc NeTworks. In IEEE
INFOCOMM 2003.
Ferreira, E., Subramanian, E., Klausner, M., Hathout, J. P.
and MANSTETTEN, D., 2001, Inverts project, Inter-
vehicle Real-Time System. The Book, Final Report
2000-2001, Bosch Research and Technology center.
Atheros Communication’s White paper on 802.11a Range
and System Capacity. Measured Performance of 5-
GHz 802.11a wireless LAN System.
Singh, J. P., Bambos, N., Srinivasan, B. and Clawin, D.,
2002, Wireless LAN Performance Under Varied Stress
Conditions in Vehicular Traffic Scenarios. In IEEE
VTC 2002.
Atheros Communication’s White paper, 802.11 Wireless
LAN Performance. 2003.
Johnson, D. B., Maltz, D. A. and Broch, J., 2001, DSR:
The dynamic source routing protocol for multi-hop
wireless ad-hoc networks. The Book, Perkins, C., ed.
Addison-Wesley, 139-172.
Hass and Pearlman, 1999, The Zone Routing Protocol
(ZRP) for Ad-hoc Networks. In IETF Internet Draft.
Ramasubramanian, V., Haas, Z. J. and Sirer, E. G., 2003,
SHARP: A Hybrid Adaptive Routing Protocol for
Mobile Ad-hoc Networks. In MobiHoc'03, June 1-3,
2003, Annapolis, Maryland, USA.
Breslau, L., Estrin, D., Fall, K., Floyd, S., Heidemann, J.,
Helmy, A., Huang, P., McCanne, S., Varadhan, K., Xu,
Y. and Yu, H., 2000, Advances in network simulation.
In IEEE computer, vol.33, no.5, May 2000, 59-67.
PERFORMANCE MEASUREMENT OF CAR-TO-CAR AD-HOC NETWORKS IN THE REAL WORLD
85
