
OPTICAL FLOW TO ANALYSE STABILISED IMAGES
OF THE BEATING HEART
Martin Gr
¨
oger
Institute of Robotics and Mechatronics, German Aerospace Center (DLR)
82234 Oberpfaffenhofen
Gerd Hirzinger
Institute of Robotics and Mechatronics, German Aerospace Center (DLR)
82234 Oberpfaffenhofen
Keywords:
Optical flow, motion field, image stabilisation, motion compensation, tracking, beating heart surgery, mini-
mally invasive surgery, image-guided surgery, medical robotics.
Abstract:
An optical flow method is developed to analyse the motion of the beating heart surface and the efficacy of
strategies to stabilise this motion. Although reduced by mechanical stabilisers, residual tissue motion makes
safe surgery still difficult and time consuming. Compensation for this movement is therefore highly desir-
able. Images of the heart surface, captured by a video endoscope, can be further stabilised based on motion
information obtained by tracking natural landmarks in realtime. The remaining motion on the heart surface is
assessed by a specially developed optical flow approach: It estimates the image velocities based on a robust
region-based strategy and provides a reliable measure of the motion field of the heart. The analysis shows that
tissue motion can be reduced by a global motion correction strategy while local motion differences remain.
1 INTRODUCTION
Intraoperative organ motion, induced by heart beat
and respiration poses special requirements to robot-
assisted surgery. Although the motion of the beating
heart is mechanically stabilised, significant residual
motion remains, which makes safe surgery difficult
and time consuming. Therefore, motion compensa-
tion is a highly desired issue, particularly in mini-
mally invasive beating heart surgery (Jacobs et al.,
2003). Recognition of this motion, captured by a
video endoscope, is essential for a motion compensa-
tion system, in which the images of the beating heart
appear stabilised to the surgeon and his instruments
are moved accordingly by the robot.
A motion correction strategy is introduced to re-
duce the heart motion remaining in the image. It is
based on realtime tracking of natural landmarks on
the heart surface (Gr
¨
oger et al., 2002). The effective-
ness of motion correction is analysed by a specially
designed region-based optical flow method. It is also
based on the mentioned tracking approach.
Estimating the motion of the heart by natural land-
marks instead of artificial markers (Nakamura et al.,
2001; Ginhoux et al., 2004; Gr
¨
oger et al., 2004) is
especially attractive since no markers need to be in-
troduced into the field of surgery. Moreover, region-
based tracking of natural landmarks yields a particular
texture unique for each landmark. This easily allows
to track several landmarks concurrently, whereas us-
ing identical artifical landmarks bears the danger of
ambiguities.
Optical flow is the apparent motion of brightness
patterns in an image (Horn, 1986). The motion field
is a purely geometric concept, which assigns a veloc-
ity vector to each point in an image. The 2D motion
field is the projection of the 3D velocities of surface
points onto the image plane. The goal of optical flow
estimation is to compute an approximation to the 2D
motion field from spatiotemporal patterns of image
intensity. Ideally, the optical flow corresponds to the
motion field (Horn, 1986).
Different approaches exist to compute the opti-
cal flow (Barron et al., 1994), among them differ-
ential and region-based methods. Differential tech-
niques, as proposed by (Horn and Schunck, 1981) and
(Lucas and Kanade, 1981), compute velocity from
spatiotemporal derivatives of image intensity (Barron
et al., 1994). These techniques calculate the optical
flow based on the gradient constraint equation, which
is defined as follows for a two-dimensional image
I
def
= I(x, y, t) with coordinates (x, y) and time t
I
x
u + I
y
v + I
t
=0, (1)
where I
x
, I
y
, and I
t
denote the partial derivatives of
237
Gröger M. and Hirzinger G. (2006).
OPTICAL FLOW TO ANALYSE STABILISED IMAGES OF THE BEATING HEART.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 237-244
DOI: 10.5220/0001378602370244
Copyright
c
SciTePress
I with respect to x, y, and t. Since this linear equa-
tion has two unknowns, i.e. the components u and
v of the motion vector at a particular image position
in x and y directions, further constraints are neces-
sary (Barron et al., 1994). The components u and v
of image velocity can be constrained by combining
local estimates of velocity through space and time.
The method by (Horn and Schunck, 1981) uses global
smoothness constraints (regularisation) in which the
motion field is defined implicitly in terms of the min-
imum of a functional defined over the image. The
method by (Lucas and Kanade, 1981) fits the mea-
surements in each neighbourhood to a local model for
the 2D velocity, using least-squares minimisation.
However, differential methods pose special re-
quirements, which can limit the detected image ve-
locities to 1 px/frame. Moreover, the smoothness con-
straint incorporates assumptions on the homogeneity
of the motion field, which can change the estimated
value of a particular image velocity undesiredly.
Region-based optical flow techniques do not re-
quire global assumptions on the imaging data and also
deal well with large image velocities, which is re-
quired for the analysis of the given sequences of the
beating heart. Therefore, a region-based optical flow
strategy is designed.
The approach of motion tracking by natural land-
marks on the heart surface is introduced first. Based
on it, a method for optical flow computation is de-
veloped, together with a measure of the resulting mo-
tion fields. Furthermore, a global motion correction
scheme, also based on the motion tracking approach,
is introduced. It is evaluated by experiments apply-
ing the proposed optical flow method to synthetic, real
and motion corrected image sequences of the heart.
2 METHODS
2.1 Motion Tracking
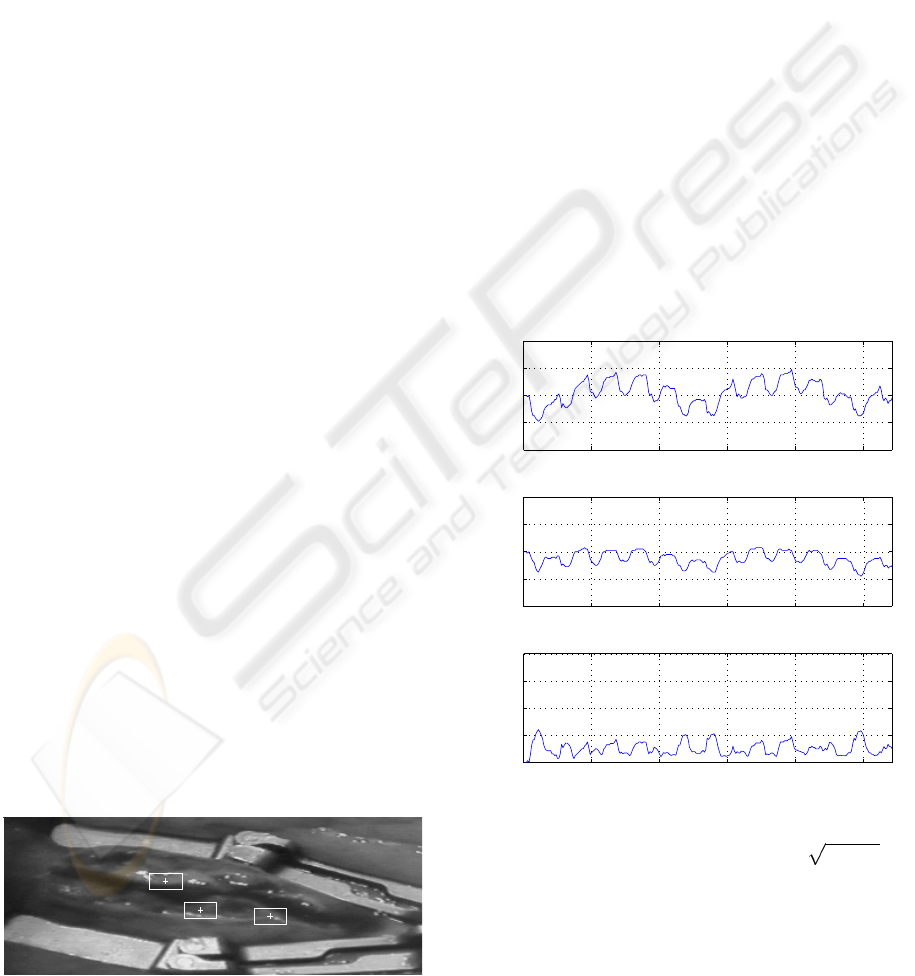
Motion of the beating heart is captured by tracking
natural landmarks on the heart surface recorded by a
video endoscope (Fig. 1).
LM
1
LM
2
LM
3
Figure 1: Heart with mechanical stabiliser and landmarks.
However, specular reflections of the light source on
the glossy surface of the beating heart (Fig. 1) can
disturb tracking of natural landmarks considerably,
which makes their appropriate treatment a prerequi-
site. Tracking outliers caused by specular reflections
on the heart surface are detected and eliminated by the
method presented in (Gr
¨
oger et al., 2005), which sub-
stitutes the reflections by intensity information taking
into account local image structure. This scheme is ap-
plied to images of the beating heart prior to tracking.
Natural landmarks are used to track local motion
on the beating heart as described in (Gr
¨
oger et al.,
2002). These landmarks are selected image patterns
of a given size and offer a particular texture. Tracking
is performed by intensity based pattern matching of a
given reference landmark in a particular search area.
The sum of squared differences (SSD) error measure
is used to find the position of the best matching pat-
tern. The nonlinear distortions of the heart surface can
be approximated in the 2D image plane by an affine
motion model, with the two translational parameters
being dominant such that they are sufficient for track-
ing in the mechanically stabilised area on the beating
heart (Gr
¨
oger et al., 2002).
0 50 100 150 200 250
−40
−20
0
20
40
t
x
[px]
0 50 100 150 200 250
−40
−20
0
20
40
t
y
[px]
0 50 100 150 200 250
0
20
40
60
80
frame
|| (t
x
, t
y
) || [px]
Figure 2: Motion trajectory of landmark LM
1
(translation in
x and y directions and overall ( (t
x
,t
y
)
def
= t
2
x
+ t
2
y
)).
Motion tracking for the analyses below is per-
formed in the translational search space, searched ex-
haustively for the best matching pattern.
Three example landmarks are shown in Fig. 1. A
block size of 30 px× 15 px proves appropriate for the
heart sequences investigated below, while the transla-
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
238

tional search area can be restricted to 70 px × 50 px.
Other tracking approaches update the reference
pattern continually, e.g. from frame to frame. This
bears the danger of tracking drift (current reference
becomes more and more dissimilar from the original
reference) and total loss of the pattern.
The proposed tracking strategy keeps the same ref-
erence pattern throughout the image sequence. This
makes tracking particularly robust, since the loss of
the pattern in one frame does not imply the total loss
of the pattern for the remaining sequence. As a draw-
back, this strategy increases the search space to find
subsequent patterns. However, since the motion of the
heart, induced by heart beat and respiration, is quasi-
periodic, the range of motion is restricted (see motion
trajectories in Fig. 2).
2.2 Optical Flow Calculation
A suitable optical flow strategy is required to analyse
the motion of the beating heart and to assess the ef-
fectiveness of the motion correction strategy. While
reliability is most important for motion analysis, the
strategy does not need to run in realtime.
Magnitudes of motion of the beating heart can be
rather large, especially when tracking by referring to
the original reference image as described above, lead-
ing to magnitudes of up to 40 px for the given image
sequence (Fig. 2). As the proposed motion correction
also keeps a reference image, the optical flow method
designed for its evaluation should calculate the veloc-
ities between the current and the reference image.
Since differential motion estimation techniques are
often restricted to small motion displacements (Bar-
ron et al., 1994), e.g. less than 1 px, satisfying results
of motion estimation cannot be expected in this con-
text. Results for the optical flow techniques by (Horn
and Schunck, 1981) and (Lucas and Kanade, 1981)
are included in the analysis below.
Therefore, a region-based optical flow method is
proposed to analyse the motion of the beating heart.
The method uses the motion tracking strategy de-
scribed above applied to every image pixel to build
a dense motion field. Outliers by specular reflections
on the heart surface are avoided by applying the de-
scribed elimination strategy prior to tracking.
2.3 Optical Flow Measure
The optical flow algorithm yields a dense motion field
of the beating heart surface. It can be represented by
a needle map, such as in Fig. 9, which, however, does
not show the motion vector of every single pixel, for
reasons of clarity. The question arises how these mo-
tion fields can be assessed to allow for evaluation and
comparison of particular heart motion scenarios, e.g.
after application of different motion correction algo-
rithms. In the following, an appropriate measure of
optical flow is presented, together with a strategy to
ensure its quality by outlier removal.
The magnitude of the remaining motion is espe-
cially important for assessing the performance of mo-
tion correction. The direction of the remaining mo-
tion is not so critical, since the goal of motion correc-
tion is to minimise the remaining motion such that its
magnitude becomes as small as possible. Moreover,
direction is not well defined for good motion correc-
tion with remaining speeds approaching zero (also see
the corresponding frequency distribution in Fig. 4 be-
low, which lacks compactness). Poor motion correc-
tion, however, is characterised by large magnitudes
of remaining motion, while the directions do not pro-
vide additional information. Therefore, only the mag-
nitude of motion is considered for the evaluation of
heart motion. The mean magnitude of all vectors of
a motion field M is proposed as a global measure of
motion and denoted as the mean speed of M
µ (M )
def
=
1
|M|
m∈M
m . (2)
Outliers in the motion field, however, can affect the
quality of this measure. Therefore, they should be de-
tected and excluded from the motion field. The mo-
tion fields in Fig. 11 show areas of outliers. Possible
outliers caused by specular reflections are prevented
by the proposed motion estimation strategy which in-
cludes their elimination. Since the motion analyses
are focussed on the beating heart surface, the image
areas of the mechanical stabiliser are excluded, the
glossy surface of which often does not bear sufficient
texture for tracking. Further, there can still be areas on
the heart surface without significant texture, i.e. rather
homogeneous regions, in which robust tracking is not
possible and outliers occur.
Motion fields of the beating heart show a clear ho-
mogeneity of velocity, which can be analysed by the
corresponding histograms. Figures 3 and 4 show fre-
quency distributions of speed and direction for orig-
inal and motion corrected image pairs. The concen-
tration around the maximum frequency in the speed
histograms confirms the observed homogeneity of the
motion field. Outliers are characterised by disturbing
this homogeneity and appear as less frequent values
farther from the maximum. Therefore, outliers can be
detected by thresholds in the frequency distribution.
Constant thresholds for a longer image sequence
of the beating heart, however, are not recommended,
since the frequency distribution of these images is too
broadly spread to find such thresholds (Fig. 5). This
is due to the periodically changing motion direction
of the heart in the image plane and the corresponding
speed fluctuations. Therefore, individual thresholds
for outlier detection are calculated for each image.
OPTICAL FLOW TO ANALYSE STABILISED IMAGES OF THE BEATING HEART
239
0 5 10 15 20 25 30 35 40 45 5
0
0
1000
2000
3000
4000
speed [px]
frequency
0 50 100 150 200 250 300 350
0
1000
2000
3000
4000
direction [ ° ]
frequency
µµ+σµ−σ
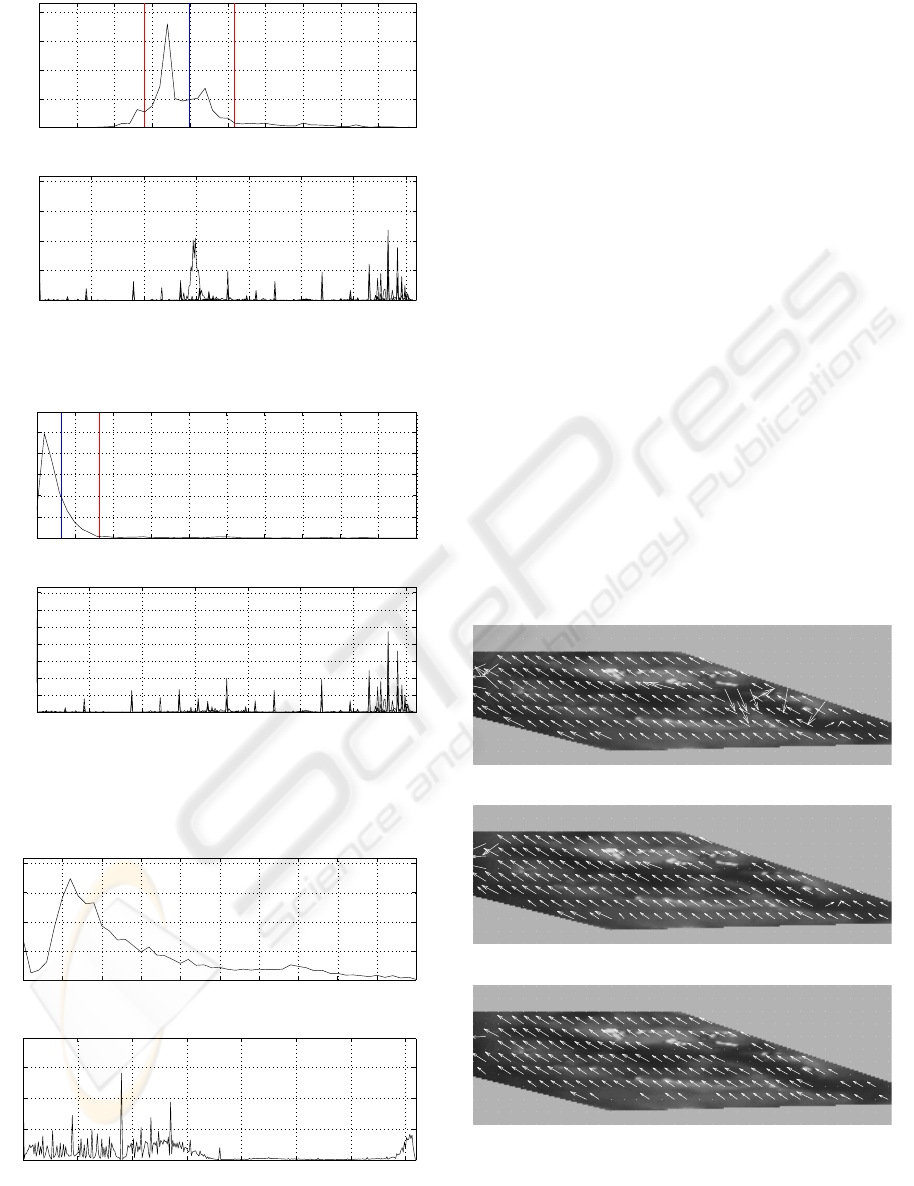
Figure 3: Frequency distributions of speed and direction in
an uncorrected image pair (frame 14).
0 5 10 15 20 25 30 35 40 45 5
0
0
1000
2000
3000
4000
5000
speed [px/frame]
frequency
0 50 100 150 200 250 300 350
0
500
1000
1500
2000
2500
3000
3500
direction [ ° ]
frequency
µµ+σ
Figure 4: Frequency distributions of speed and direction in a
motion corrected image (frame 14, global motion correction
by landmark LM
2
).
0 5 10 15 20 25 30 35 40 45 50
0
2
4
6
8
x 10
5
speed [px/frame]
frequency
0 50 100 150 200 250 300 350
0
1
2
3
x 10
5
direction [ ° ]
frequency
Figure 5: Frequency distributions of speed and direction in
271 images of an uncorrected image sequence.
Making the thresholds dependent on the mean
speed µ of the current image yields good outlier de-
tection. Let σ be the standard deviation of speeds of
the motion field. As shown in Figures 3 and 4 an area
of acceptance of µ ± σ captures the most frequent and
nearby speeds well, particularly for lower speeds as
occurring in motion compensated image sequences.
Figures 6 and 7 show the removal of outliers for ex-
amples in the original and motion corrected image se-
quences. The µ ± σ threshold rejects 5.5 % of all
motion vectors as outliers in the motion corrected im-
age sequence but 18.5 % in the original one. This fact
and the corresponding histogram distribution indicate
that a µ ± 2σ threshold could be more appropriate
for the original image sequence with higher speeds,
which only rejects 6.0 % of all motion vectors as out-
liers. This threshold reduces the number of outliers
to 4.0 % in motion corrected images. However, since
a large area of acceptance bears the danger of unde-
tected outliers and the focus of analysis is on motion
corrected images, the stricter threshold of µ ± σ is
used in the following to measure the mean speed of
motion fields of the beating heart. So a motion vector
m is accepted only if its speed is in the µ±σ area, i.e.
m ∈[ µ − σ, µ+ σ ] . (3)
(a) Without removal of outliers.
(b) Acceptance region µ ± 2σ, 6.0 % outliers.
(c) Acceptance region µ ± σ, 18.5 % outliers.
Figure 6: Motion fields with outliers removed by threshold-
ing (frame 14 in original image sequence).
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
240
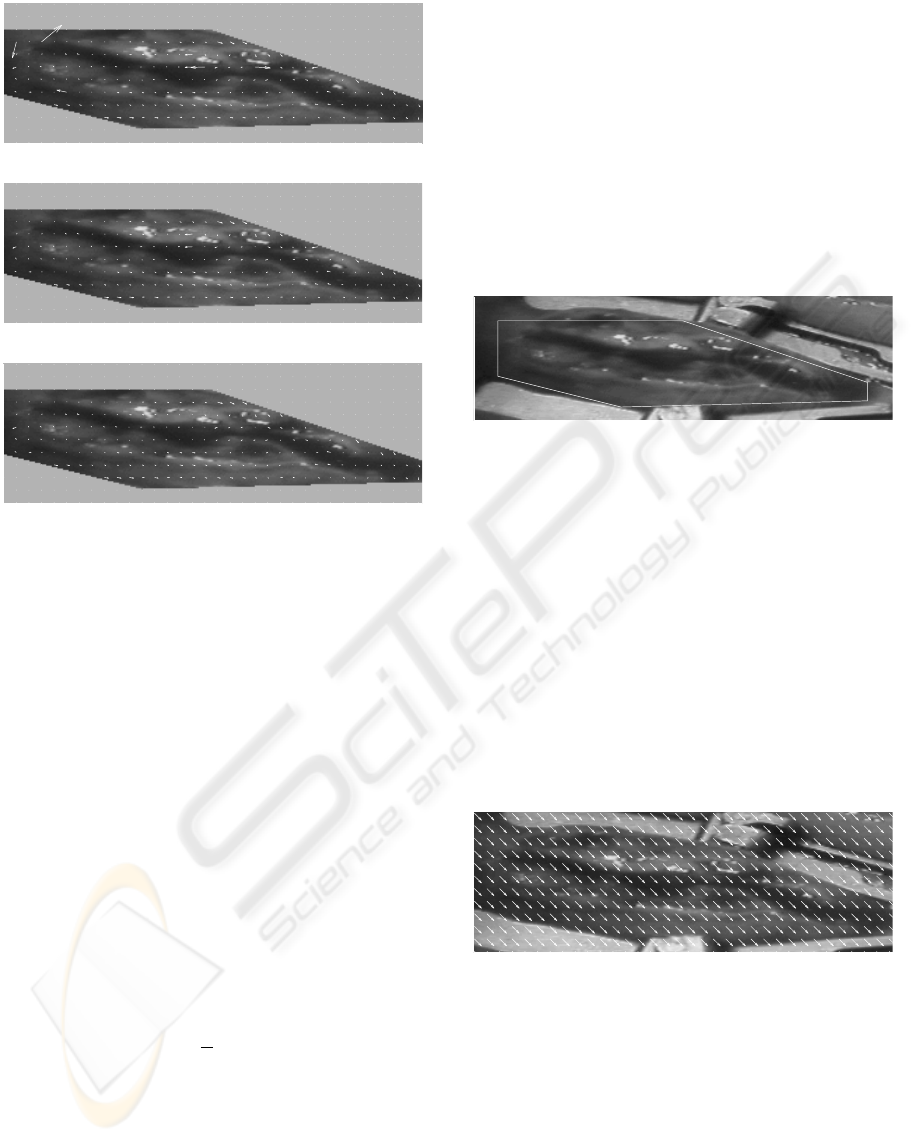
(a) Without removal of outliers.
(b) Acceptance region µ ± 2σ, 4.0 % outliers.
(c) Acceptance region µ ± σ, 5.5 % outliers.
Figure 7: Motion fields with outliers removed by threshold-
ing (frame 14 in motion corrected image sequence).
2.4 Motion Correction
Stabilisation of images of the beating heart uses the
tracked motion of natural landmarks. A global mo-
tion vector is used to correct the motion by translation
constant all over the image. A first strategy uses the
motion of a single landmark to build the motion cor-
rection vector. Combining the motion of several land-
marks increases robustness. A given tracked land-
mark i with reference position (x
i,0
,y
i,0
) yields a 2D
motion vector c
i
in the image plane at time t, i.e.
c
i
def
=
u
i
v
i
=
x
i,t
− x
i,0
y
i,t
− y
i,0
. (4)
Motion is corrected by translating the whole im-
age by the vector −c
i
. This strategy can easily be ex-
tended to several landmarks. The global motion vec-
tor c is calculated by the mean of n given landmarks
with motion vectors c
i
, i.e.
c
def
=
1
n
n
i=1
c
i
. (5)
Using the mean motion vector of several landmarks
makes the resulting global motion correction vector c
more characteristic of the motion of the heart surface
and increases robustness in case of tracking outliers.
This motion correction strategy is similar the visual
servoing approach of tracking a particular landmark
on the heart surface by the viewing camera, which
only allows for global motion correction in the image.
3 EXPERIMENTS
The methods of optical flow and the mean speed mea-
sure are used to analyse motion in image sequences of
the beating heart and to assess the developed strategy
for image stabilisation by global motion correction.
First, optical flow is verified on a synthetic image
sequence of the heart, for which the underlying mo-
tion is known. Then the optical flow strategy is used
to estimate the motion of real image sequences of the
beating heart – first without motion correction, then
with the global motion correction strategy applied.
Figure 8: Region of interest (ROI) on the beating heart.
Since motion analysis focuses on the heart surface,
the optical flow measure is only calculated in the re-
gion of interest (ROI) between the branches of the me-
chanical stabiliser as shown in Fig. 8.
3.1 Synthetic Image Sequence
For an objective, quantitative analysis of optical flow
algorithms the true motion is desired to be known
in advance. Since, however, this is not the case for
the heart sequences, a synthetic sequence with known
motion is created. Of course, this sequence should
have properties close to the real image sequence.
Figure 9: Motion field in the region of interest of the syn-
thetical image sequence with constant global motion.
The prevailing motion in image sequences of the
mechanically stabilised beating heart is translational
(Gr
¨
oger et al., 2002). Moreover, the analysis of tra-
jectories of several natural landmarks on the beating
heart, e.g. those in Fig. 2, shows that the occurring
motion can be rather large, up to 40 px. Therefore,
a synthetic image sequence is created by translating
one reference image of the heart by up to 20 px in
steps of 0.2 px using bilinear interpolation. The max-
imum motion of 20 px occurs when comparing the
OPTICAL FLOW TO ANALYSE STABILISED IMAGES OF THE BEATING HEART
241
last frame to the first one. Figure 9 shows the motion
field of this sequence.
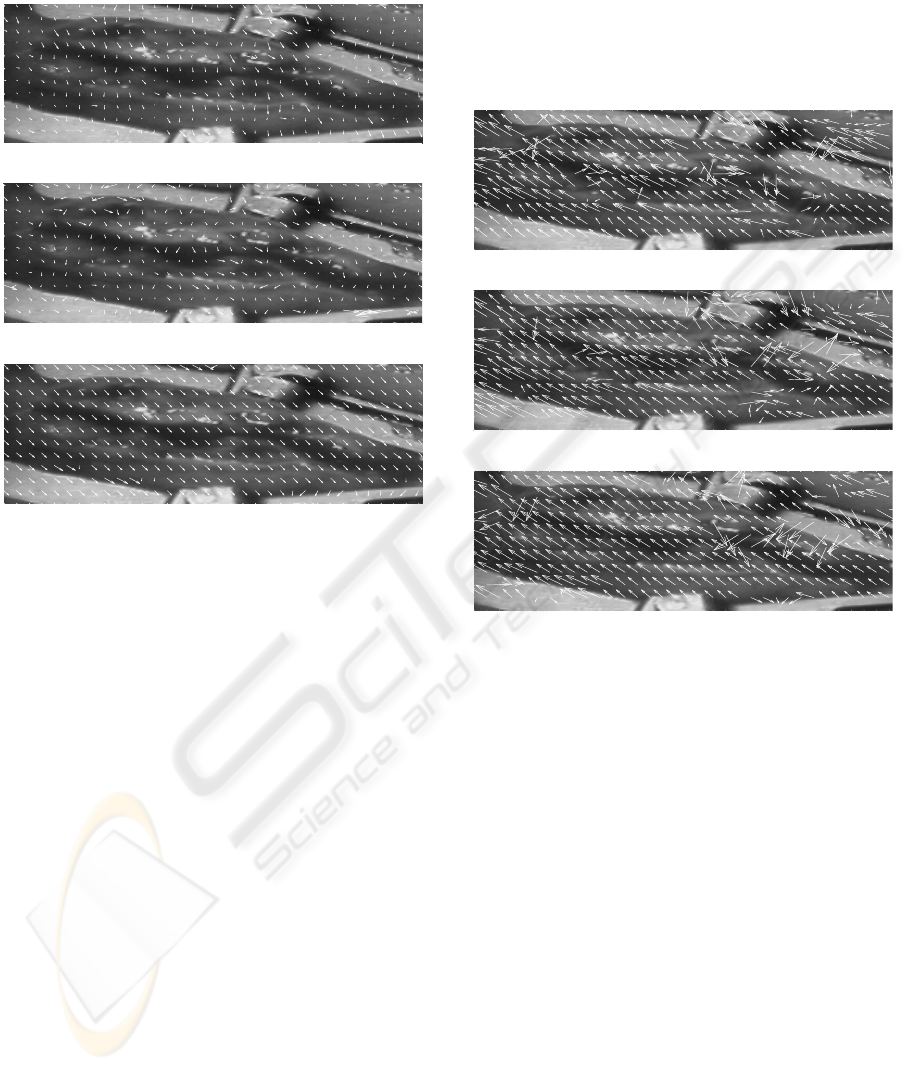
(a) Horn-Schunck (λ =0.1)
(b) Lucas-Kanade (window 15 px × 15 px)
(c) Block-Matching (block size 30×15, precision 0.125 px)
Figure 10: Calculated motion fields of synthetic image se-
quence (image translated by 1.6 px, vectors scaled by 2).
Two differential optical flow strategies, (Horn and
Schunck, 1981) and (Lucas and Kanade, 1981), and
the proposed region-based strategy are investigated
on this sequence. Figure 10 shows the result for the
image pair being translated by 1.6 px. The first dif-
ferential strategy (Horn and Schunck, 1981) uses a
smoothness parameter of λ =0.1, while the second
approach (Lucas and Kanade, 1981) controls smooth-
ness locally by a window of size 15 px × 15 px. The
block-matching strategy uses a 30 px × 15 px block
and is run at subpixel precision of 0.125 px.
As can be seen in Fig. 10, only the block-matching
strategy is able to detect the true motion of the image
sequence reliably for a translation of 1.6 px. The re-
sults at higher translations are even much worse for
the two differential approaches, which generally have
problems to detect larger speeds (Barron et al., 1994).
Therefore, the block-matching approach is used in
the following to calculate the optical flow measures of
the beating heart.
3.2 Real Image Sequence
The proposed region-based optical flow approach is
applied to a real image sequence of the beating heart,
consisting of 271 frames at a framerate of 25 Hz.
Since the true motion of the real image sequence is
unknown, the optical flow algorithm has to be eval-
uated by special measures on the motion field itself,
without the possibility of comparing the result to the
underlying motion. The issues of homogeneity and
outliers are particularly important in this context.
(a) Without elimination of specular reflections.
(b) With elimination of specular reflections.
(c) With elimination of specular reflections and illumination
compensation.
Figure 11: Motion fields of the real image sequence cal-
culated by block-matching approach (frame 13, block size
30 px × 15 px, vector lengths scaled by 0.5).
Figure 11 shows the motion fields of the origi-
nal image sequence calculated by different versions
of the region-based optical flow approach for a se-
lected image pair. The application of specular reflec-
tion removal prior to the block-matching developed
in (Gr
¨
oger et al., 2005) is necessary to avoid outliers.
Also, the illumination compensation scheme, provid-
ing mean compensated patterns when finding the best
match as described in (Gr
¨
oger et al., 2002) is impor-
tant. The remaining outliers in the motion field occur
on the one hand at the mechanical stabiliser, which is
outside the ROI (see Fig. 8), and on the other hand
e.g. at image areas with insufficient texture informa-
tion and are therefore not considered in the proposed
optical flow measure of mean speeds (see Sect. 2.3).
The motion fields calculated by the region-based
optical flow strategy are homogeneous and corre-
spond to the impression of motion with visual inspec-
tion. This confirms the result obtained by the syn-
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
242
thetic image sequence in the previous section that this
approach is well suited to detect the motion of the
beating heart in the given image sequences.
The mean speed of all motion vectors in the re-
gion of interest and of the whole image sequence is
10.21 px/frame; its mean speed per image over this
sequence can be seen in Fig. 12.
3.3 Motion Corrected Sequence
The described global motion correction scheme is ap-
plied to the given image sequence of the beating heart.
The results of motion correction are evaluated by the
mean speed of the remaining motion field.
Trajectories of different landmarks are used to per-
form motion correction. First, the result of mo-
tion correction by single landmarks is shown. Then
motion information from several landmarks is com-
bined, and finally also landmarks on the mechani-
cal stabiliser are used. The evaluation of motion al-
ways relates to the region of interest (ROI) inside the
branches of the mechanical stabiliser (see Fig. 8).
50 100 150 200 250
0
5
10
15
20
25
30
35
frame
mean speed [px/frame]
motion corrected (LM
1
)
original sequence
Figure 12: Mean speeds of original and corrected image
sequence (global translation by motion of landmark LM
1
).
Motion correction based on single landmarks is in-
vestigated for the three landmarks given in Fig. 1.
Figure 12 provides the mean speed of motion in the
ROI in the original image sequence and after image
correction by the motion of landmark LM
1
. It shows
that image motion is significantly reduced and also
stays below a certain threshold of 5 px/frame. The
Table 1: Mean speeds of image sequence, motion globally
corrected by single landmarks.
landmark mean speed
LM
1
2.15 px/frame
LM
2
2.72 px/frame
LM
3
2.25 px/frame
mean speed of the whole sequence is 10.21 px/frame
for the original image sequence, but can be reduced to
speeds between 2 and 3 px/frame by motion correc-
tion depending on the selected landmark (see Tab. 1).
This also shows that the quality of motion correc-
tion depends on the selected landmark. To make mo-
tion correction less dependent on single landmarks
and thus make the calculated global motion correc-
tion vector more characteristic of the occurring heart
motion, the mean motion of several landmarks is used
as introduced in Sect. 2.4.
LM
11
LM
12
LM
13
LM
1
LM
14
LM
15
LM
16
LM
2
Figure 13: Heart surface with landmark choice C
5
.
Image correction by the mean motion of several
landmarks is investigated for the eight landmarks
shown in Fig. 13. An increasing number of landmarks
is used to correct the motion of the beating heart. The
results in Tab. 2 show that the mean speed can be re-
duced from 2.15 px/frame for a single landmark down
to 1.91 px/frame for all landmarks together. Using
several landmarks leads to lower mean speeds and
thus better motion correction. Also, the mean speed
cannot be reduced by additional landmarks once a
sufficient number has been reached. This indicates
some residual local motion which cannot be compen-
sated by global motion correction.
Table 2: Mean speeds of image sequence, motion globally
corrected by mean of increasing number of landmarks, C
5
.
Number of landmarks mean speed
1 2.15 px/frame
2 2.07 px/frame
3 1.99 px/frame
4 2.09 px/frame
5 2.04 px/frame
6 1.97 px/frame
7 1.92 px/frame
8 1.91 px/frame
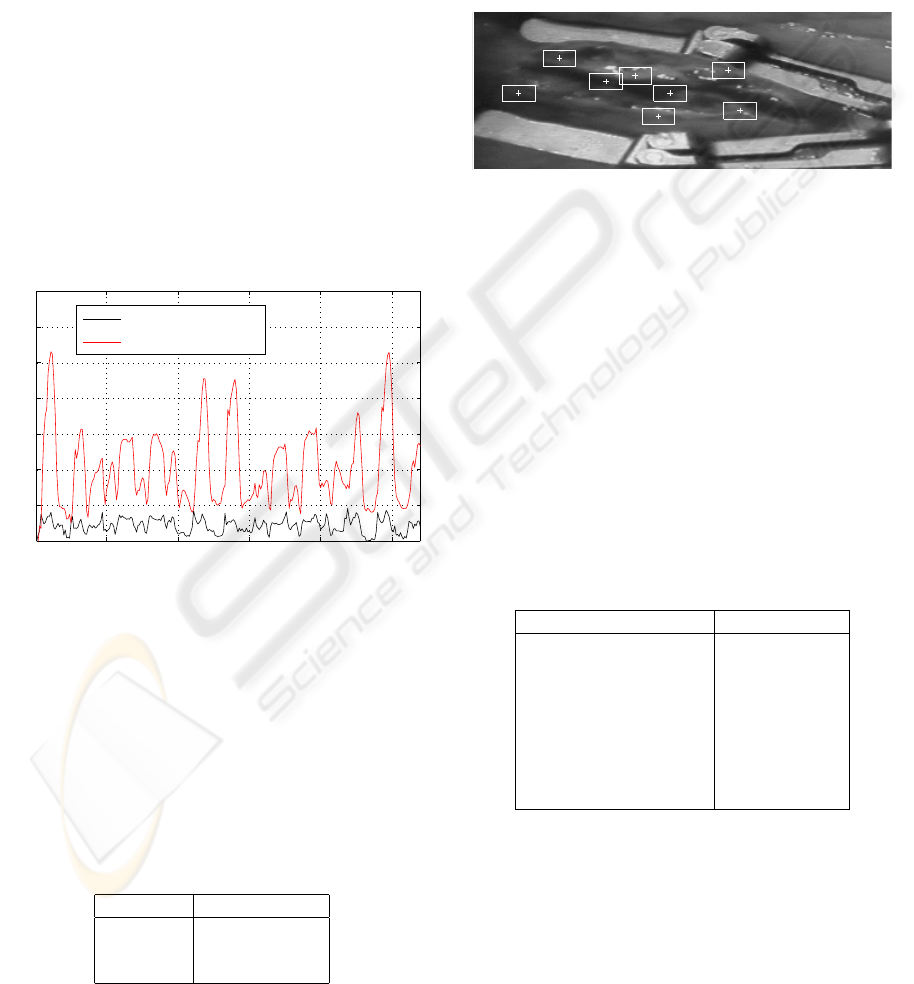
Finally, five landmarks tracking the motion of the
mechanical stabiliser (Fig. 14) are used to correct
the motion of the heart surface area stabilised by it.
The resulting stabilised image sequence yields a mean
speed of 3.57 px/frame. Compared to results achieved
by landmarks on the heart surface (Fig. 2) this shows
that the motion of the mechanical stabiliser is not suf-
ficiently characteristic of the motion of the heart sur-
face to allow for good motion correction.
OPTICAL FLOW TO ANALYSE STABILISED IMAGES OF THE BEATING HEART
243

LM
4
LM
7
LM
8
LM
5
LM
6
Figure 14: Landmarks at the mechanical stabiliser.
4 RESULTS
Results of motion correction are evaluated by calcu-
lating the remaining optical flow in the stabilised im-
ages. An analysis of different methods to compute
the optical flow shows that a method based on block
matching as used for tracking natural landmarks is
best suited to estimate the motion field of the beat-
ing heart surface reliably. Specular reflections can
disturb motion fields considerably but can be elimi-
nated by the approach of (Gr
¨
oger et al., 2005) before
the optical flow is calculated. Moreover, outliers still
remaining in the motion field are detected by homo-
geneity measures and removed before evaluation. The
proposed mean speed of image velocities in the mo-
tion field proves as a suitable measure to estimate the
motion of the heart surface in the image plane and to
compare different motion correction strategies.
The evaluation of the motion fields of stabilised
images shows that the global motion correction ap-
proach is able to reduce the image motion of the beat-
ing heart surface significantly. It becomes especially
robust when using the mean motion of several land-
marks for motion correction. The resulting motion
correction consists of a global translation of the im-
age, which can be implemented very efficiently.
The results of global motion correction also show
that the motion of the elastic surface of the me-
chanically stabilised beating heart still varies locally.
Therefore image motion cannot be fully reduced by
globally constant translation. This global approach
corresponds to motion compensation achievable by
moving the viewing camera, which is therefore not
sufficient either to fully stabilise beating heart images.
5 CONCLUSION
Investigations show that the developed optical flow
strategy is able to estimate the motion on the beat-
ing heart surface reliably. The proposed measure of
mean speeds proves well suited to analyse and com-
pare motion fields describing the motion of the beat-
ing heart surface. The presented global motion cor-
rection scheme is applicable in realtime and signif-
icantly reduces the remaining motion of mechani-
cally stabilised images of the beating heart. However,
residual image motion still remains due to local mo-
tion differences of the beating heart surface. There-
fore, for full motion compensation, locally adaptive
motion correction strategies have to be applied.
ACKNOWLEDGEMENTS
This work has been supported in part by the Ger-
man Research Foundation (DFG). The authors also
thank U. Haberhauer for assistance with motion an-
alysis and Dr. D.H. B
¨
ohm from the Department of
Cardiovascular Surgery at the University Hospital of
Hamburg-Eppendorf (UKE), Germany, for clinical
support and video sequences of the beating heart.
REFERENCES
Barron, J., Fleet, D., and Beauchemin, S. (1994). Perfor-
mance of optical flow. International Journal of Com-
puter Vision, 12:1:43–77.
Ginhoux, R., Gangloff, J., de Mathelin, M., and et al (2004).
Beating heart tracking in robotic surgery using 500 Hz
visual servoing, model predictive control and an adap-
tive observer. In IEEE ICRA, pages 274–279, New
Orleans, USA.
Gr
¨
oger, M., K
¨
ubler, B., and Hirzinger, G. (2004). Selection
of qualified colour markers for heart surface tracking.
In BMT, volume 49-2, pages 192–193, Illmenau.
Gr
¨
oger, M., Ortmaier, T., Sepp, W., and Hirzinger, G.
(2002). Tracking local motion on the beating heart. In
Medical Imaging 2002, volume 4681 of SPIE, pages
233–241, San Diego, USA.
Gr
¨
oger, M., Sepp, W., and Hirzinger, G. (2005). Structure
driven substitution of specular reflections for realtime
heart surface tracking. In IEEE International Con-
ference on Image Processing (ICIP), volume 2, pages
1066–1069, Genova, Italy.
Horn, B. (1986). Robot vision. MIT Press, Cambridge,
Massachusetts.
Horn, B. and Schunck, B. (1981). Determining optical flow.
Artificial Intelligence, 17:185–204.
Jacobs, S., Holzhey, D., Kiaii, B., Onnasch, J., Walther,
T., Mohr, F., and Falk, V. (2003). Limitations for
manual and telemanipulator-assisted motion tracking
– implications for endoscopic beating-heart surgery.
Ann Thorac Surg, 76:2029–2035.
Lucas, B. and Kanade, T. (1981). An iterative image regis-
tration technique with an application to stereo vision.
In Proc 7th Intl Conf on Artificial Intelligence, pages
674–679.
Nakamura, Y., Kishi, K., and Kawakami, H. (2001). Heart-
beat synchronization for robotic cardiac surgery. In
IEEE ICRA, pages 2014–2019, Seoul, Korea.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
244
