
HUMAN POSTURE TRACKING AND CLASSIFICATION THROUGH
STEREO VISION
Stefano Pellegrini and Luca Iocchi
Dipartimento di Informatica e Sistemistica
Univesit
`
a di Roma “La Sapienza”
Via Salaria 113, Roma 00198, Italy
Keywords:
Human Posture Classification, Human Activity Recognition, 3D Modeling, Stereo Vision.
Abstract:
The ability of detecting human postures is very relevant for applications related to the analysis of human
behaviors. Techniques for posture detection and classification can be thus very important in several fields,
like ambient intelligence, surveillance, elderly care, etc. This problem has been studied in recent years in
the Computer Vision community, but proposed solutions still suffer from some limitations that are due to the
difficulty of dealing with complex scenes (e.g., occlusions, different view points, etc.).
In this paper we present a system for posture tracking and classification that uses a stereo vision sensor, which
provides both for a robust way to segment and track people in the scene and 3D information about tracked
people. The presented method uses a 3D model of human body, performs model matching through a variant of
the ICP algorithm and then uses a Hidden Markov Model to model posture transitions. Experimental results
show the effectiveness of the system in determining human postures in presence of partial occlusions and from
different view points.
1 INTRODUCTION
Computer vision techniques for human posture recog-
nition have been developed in the last years by us-
ing different techniques aiming at recognizing human
activities (see for example (Gavrila, 1999; Moeslund
and Granum, 2001)) for different kinds of application,
including surveillance, ambient intelligence, elderly
care. The main problems in developing such systems
arise from the difficulties of dealing with the many
situations that occur when analyzing general scenes
in real environments. Consequently, all the works
presented in this area have limitations with respect
to a general applicability of the systems. In this pa-
per we present an approach to human posture track-
ing and classification that aims at overcoming some
of these limitations, thus enlarging the applicability
of this technology.
A major distinction among works in human posture
recognition is given by the presence of a model of the
human body. Methods that do not use human mod-
els are based on low-level features extracted from the
images. For example, (Cucchiara et al., 2005a) use
Projection Histograms and (Goldmann et al., 2004)
use also Contour-Based Shape Descriptors to classify
some a priori defined postures. The main drawback of
these methods is that they rely on correct segmenta-
tion of person silhouette and thus are quite sensitive to
noise, occlusions and to the view point from which the
person is seen, since low-level features tend to ignore
some relevant information in the images, e.g., the po-
sition of recognizable body parts such as the head or
the hands. The work in (Cucchiara et al., 2005b) uses
a multi-camera setting to overcome problems related
to partial occlusions in posture classification, provid-
ing a solution to determine standing postures in pres-
ence of occlusions.
Methods based on a human model can be distin-
guished in two categories: the first includes works us-
ing a 2D model analyzing 2D data (monocular cam-
era), the second using a 3D model analyzing either 2D
or 3D data (stereo vision or multi-camera settings).
Works in the first group are often characterized by
the fact that a predefined point of view or some con-
straints on the movements of the person being ana-
lyzed must be specified for the procedure to grant ef-
fective results.
The majority of the works based on a human model
use a 3D model, both in the case of 2D and 3D input
data. In (Sminchisescu and Triggs, 2003) the para-
meters of a complete 3D model are estimated from
monocular images using particle filtering, but the time
used for the analysis of each image is prohibitive to
real-time applications. In (Boulay et al., 2005) pos-
261
Pellegrini S. and Iocchi L. (2006).
HUMAN POSTURE TRACKING AND CLASSIFICATION THROUGH STEREO VISION.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 261-269
DOI: 10.5220/0001376702610269
Copyright
c
SciTePress

tures are searched using a 3D complete model. After
image segmentation, the silhouette of the detected im-
age is compared to the virtual silhouette generated by
the model in some predefined postures. The posture
of the model which has the best match, according to
a projection histogram procedure, is chosen to be the
right one. (Bregler and Malik, 1998) use a complete
3D model approach that can be used both with a single
camera setting, but constrain the human motion to be
along a single direction, and with multiple cameras.
In any case, the initial position of the joints must be
specified by the user. The approaches using 3D mod-
els from monocular cameras can better deal with dif-
ferent view points, but have problems with occlusions
due to unpredictable variations of the person figures.
The above works deal with posture tracking in dif-
ferent ways. Some of them (Demirdjian et al., 2003;
Bregler and Malik, 1998; Sminchisescu and Triggs,
2003) use different tracking techniques for comput-
ing and updating the parameters of the model. These
works are indeed not focused on posture classifica-
tion, i.e., determining specific postures. Other works
instead propose a two-steps approach: first, model
matching or feature-based procedures are used to de-
termine a posture within a predefined set, then a tem-
poral filter is used to integrate these values over time.
For example, (Cucchiara et al., 2005b) uses projection
histograms to determine postures and then a Hidden
Markov Model to track them over time. In general,
when the goal is to recognize predefined postures,
temporal filtering allows for improving performance
with respect to frame by frame classification.
Finally, multi-camera setting has been used for
tracking human body movements: (Demirdjian et al.,
2003) use stereo vision and a 3D model of the upper
human body for real-time 3D tracking of head, torso
and arms, while in (Grammalidis et al., 2001) the pa-
rameters of an MPEG4 3D model are estimated using
the depth image coming from the person being ana-
lyzed. However, posture classification has not been
explicitly addressed in these works.
The approach to human posture tracking and clas-
sification presented here is based on stereo vision seg-
mentation. Real-time people tracking through stereo
vision (see for example (Beymer and Konolige, 1999;
Bahadori et al., 2005; Iocchi and Bolles, 2005))
has been successfully used for segmenting scenes in
which people move in the environment and are able to
provide not only information about the appearance of
a person (e.g. colors) but also 3D information of each
pixel belonging to the person.
In practice a stereo vision based people tracker pro-
vides, for each frame, a set of data in the form XYZ-
RGB containing a 2 1/2D model and color informa-
tion of the person being tracked. Moreover, corre-
spondences of these data over time are also available;
therefore, when multiple people are in the scene, we
have a set of XYZ-RGB data over time for each per-
son. Obviously, this kind of segmentation can be af-
fected by errors, but the experience we report in this
paper is that this phase is good enough to allow for
implementing an effective posture classification tech-
nique as described here. Moreover, the use of stereo-
based tracking guarantees a high degree of robustness
also to illumination changes, shadows and reflections,
thus making the system applicable in a wider range of
situations.
The contribution of this paper is to describe a
method for posture tracking and classification given
a set of data in the form XYZ-RGB, corresponding to
the output of a stereo vision based people tracker. The
presented method uses a novel 3D model of human
body, performs model matching through a variant of
the ICP algorithm, tracks the model parameters over
time, and then uses a Hidden Markov Model to model
posture transitions and to classify among a set of main
human postures: UP, SIT, BENT, ON KNEE, LAID.
The resulting system is able to reliably track human
postures, overcoming some of the difficulties in pos-
ture recognition, and in particular presenting higher
robustness to partial occlusions and to different view
points. Moreover, the system does not require any off-
line training phase, it just uses the first frames (about
10) in which the person is tracked to automatically
learn parameters that are then used for model match-
ing. During these training frames we only require that
the person is in the standing position (with any orien-
tation) and that his/her head is not occluded.
The evaluation of the method has been performed
on the actual output of a stereo vision based peo-
ple tracker, thus validating in practice the chosen ap-
proach. Results show the feasibility of the approach
and its robustness to partial occlusions and different
view points.
The paper is organized as follows. Section 2 de-
scribes the data processed by a stereo vision based
people tracker that are used as input for the method
described here. Section 3 presents a discussion about
the choice of the model that has been used for rep-
resenting human postures, while Section 4 describes
the tracking of the principal points and the computa-
tion of the parameters of the model. In Section 5 we
present the classification method and finally Section 6
includes experimental evaluation of the method. Con-
clusions and future work will conclude the paper.
2 IMAGE SEGMENTATION AND
PEOPLE TRACKING
The method presented in this paper takes as input a
sequence of data in the form XYZ-RGB that are rela-
tive to a person tracked in the scene. A stereo vision
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
262
based people tracker (Bahadori et al., 2005; Iocchi
and Bolles, 2005) has been used to produce these data.
This system has been proved to be robust to illumi-
nation changes, partial occlusions, shadows, provides
for real-time implementations and is able to deal with
multiple people in the scene. The system provides
reliable data that can be actually used for posture de-
tection and classification.
For each tracked person, the system provides a set
of data Ω={ω
t
0
, ..., ω
t
} from the time t
0
in which
the person is first detected to current time t. The value
ω
t
= {(X
i
t
,Y
i
t
,Z
i
t
,R
i
t
,G
i
t
,B
i
t
)|i ∈F}is the set of
XYZ-RGB data for each pixel i identified as a fore-
ground element in the scene (i.e. belonging to a per-
son). The reference system is chosen in order to have
the plane XY coincident with the ground floor.
The tracker system produces two kinds of errors
in this data: 1) false positives, i.e. some of the pix-
els in F do not belong to the person; 2) false nega-
tives, i.e. some pixels belonging to the person are not
present in F. Examples of segmentation are in the up-
per part of Figure 3, where only the foreground pixels
for which it is possible to compute 3D information
are displayed. By analyzing the data produced by the
tracking system we estimate that the rate of false pos-
itives is about 10% and the one of false negatives is
about 25%. The method described in this paper can
reliably tolerate such errors, thus being very robust
to noise in segmentation that is typical in real world
scenarios.
3 A 3D MODEL FOR POSTURE
REPRESENTATION
The choice of a model is critical for the effectiveness
of recognition and classification, and it must be care-
fully taken by considering the quality of data available
from the previous processing steps. Therefore, differ-
ent models have been used in literature, depending on
the objectives and on the input data available for the
application (see (Gavrila, 1999) for a review). These
models differ mainly for the quantity of information
represented.
In our application the input data are not sufficient to
cope with hands and arms movement. This is because
arms are often missed by the segmentation process,
while noises may appear as arms. Without taking into
account arms and hands in the model, it is not possi-
ble to retrieve information about hand gestures, but is
still possible to detect most of the information that al-
lows to distinguish among the principal postures, such
as UP, SIT, BENT, ON KNEE, LAID, etc. Our appli-
cation is mainly interested in classifying these main
postures and thus we adopted a model that does not
contain explicitly arms and hands.
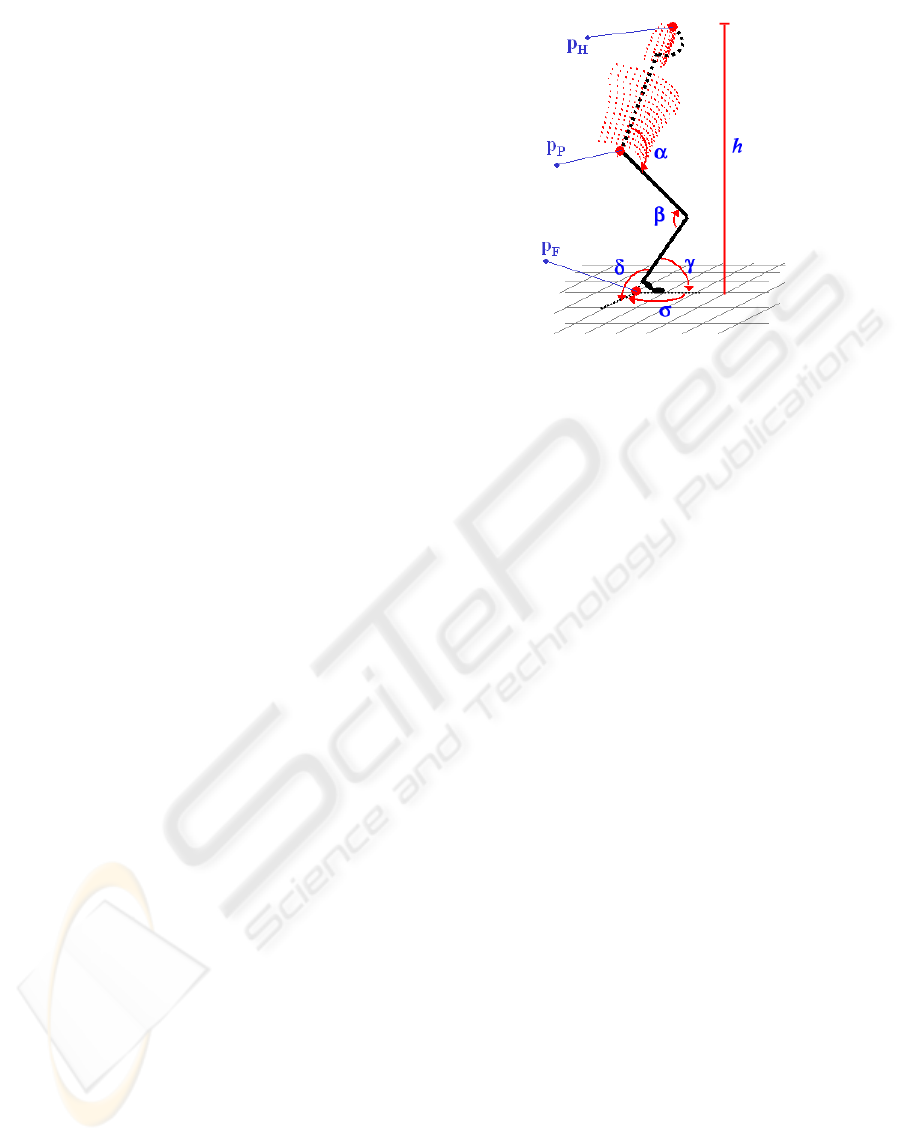
Figure 1: 3D Human model for posture classification.
The model used in our application is shown in Fig-
ure 1. It is composed by two sections: a head-torso
block and a leg block.
Since we are not interested in knowing head move-
ments, we model the head together with the torso in
a unique block (without considering degrees of free-
dom for the head). However, the presence of the head
in the model is justified by two considerations: 1) in
a camera set-up in which the camera is placed high in
the environment heads of people are very unlikely to
be occluded; 2) heads are easy to be detected, since
3D and color information are available, and modeled
for tracking, since it is reasonable to assume that head
appearance can be modeled with a bimodal color dis-
tribution, usually corresponding to skin and hair color.
The pelvis joint is simplified to be a planar rotoidal
joint, instead of a spherical one. This simplification
is justified if one thinks that, most of the times, the
pelvis is used to bend frontally. Also, false positives
and false negatives in the segmented image and the
distortion due to the stereo system, make the attempt
of detecting vertical torsion and lateral bending ex-
tremely difficult.
The legs are unified in one articulated body. As-
suming that the legs are always in contact with the
floor, a spherical joint is adopted to model this point.
For the knee a single planar rotoidal joint is instead
used.
The model is built by assuming a constant ratio
between the dimensions in the model parts and the
height of a person, which is instead evaluated by 3D
data of the person tracked.
On this model we define three principal points: the
head (p
H
), the pelvis (p
P
) and the feet point of con-
tact with floor (p
F
) (see Figure 1). These points are
tracked over time, as shown in the next section, and
used to determine measures for classification. In par-
ticular, we are able to estimate the five angles α, β, γ,
HUMAN POSTURE TRACKING AND CLASSIFICATION THROUGH STEREO VISION
263

δ, σ, and the height h shown in Figure 1.
The parameters of the model that are measured dur-
ing model matching and then used for pusture classi-
fication are z =< α,β,γ,δ,h
norm
>, where h
norm
is
the ratio between the height measured at the current
frame and the height of the person measured during
the training phase, while σ is not included, since it
does not contribute to posture detection.
4 TRACKING MODEL
PARAMETERS
Detection and tracking of the principal points of the
model is important to measure parameters of the
model that are used for classification. Our proce-
dure, while attempts to find the position of the head,
of the pelvis joint and of the feet point of contact for
each image in the sequence, it also analyzes the se-
quence of observations over multiple frames, so gath-
ering progressively information about the symmetry
plane and the direction of the left hand.
Since the human model contains data that must be
adapted to the person being analyzed, a training phase
must be executed for the first frames in the sequence
(ten frames are normally sufficient), to measure the
person’s height and to estimate the bimodal color dis-
tribution. Assuming that in this phase the person is
exhibiting an erect posture with arms below the shoul-
der level, the height is measured for each frame in the
training phase and the average value λ over the train-
ing sequence is taken.
During the training phase a bi-modal color distribu-
tion of the head ξ is also computed. Considering that a
progressively correct estimation of the height (and, as
a consequence, of the other body dimensions) is avail-
able, the points in the image which height is greater
than the neck level can be considered as head points.
Since the input data provide also color of each point
in the image, we can estimate a bimodal color distrib-
ution by applying the k-mean algorithm on head color
points, with k =2.
After the training phase the Algorithm 1 reported
below is used to determine and track over time the
parameters of the model. In the algorithm, M is
the model described in the previous section, ξ and λ
are the values learned during the training phase de-
scribed above, and λ
TH
is a threshold. Θ denotes
the internal state of the tracker and it is defined by
Θ={Π,τ,φ}, with Π={p
F
, p
P
, p
H
} being the
set of the three principal points, τ is the symmetry
plane of the model, φ is the direction of the model
within the symmetry plan (it can assume two values:
left or right). The algorithm, given the current input
data ω, computes the model parameters z and update
its internal state (denoted by Θ
).
Algorithm 1. Track model parameters
INPUT: ω, Θ
OUTPUT: z, Θ
CONST: M, ξ, λ, λ
TH
begin
h
M
= max{Z
i
|(X
i
,Y
i
,Z
i
,R
i
,G
i
,B
i
) ∈ ω};
if ( λ − h
M
<λ
TH
) {
Θ
=Θ;
z =[0, 0, 0, 0, 1];
}
else {
[
˜
p
P
,
˜
p
H
]=ICP(M,ω,ξ);
if (!leg
occluded(ω, p
F
))
˜
p
F
= find leg(ω, p
F
)
else
˜
p
F
= project on floor(
˜
p
P
);
Π
= kalman(Π,
˜
Π);
τ
= filter plane(τ,Π
);
ˆ
Π
= project on plane(Π
,τ);
ρ = evaluate
left posture(
ˆ
Π
,τ
);
φ
= filter(ρ, φ);
z =[get
angles(
ˆ
Π
,τ
,φ
),h
M
/λ];
}
end
The first part of the algorithm evaluates the maxi-
mum height of the pixels representing the person (we
assume that the head of the person is always visible).
If the difference between the current height and the
person’s nominal height is below the threshold λ
TH
,
then the values of the model are fixed to standard val-
ues denoting the erect posture. This simplifies com-
putation in many cases.
Otherwise, the principal points p
H
and p
P
are
estimated using a variant of the ICP algorithm
(Rusinkiewicz and Levoy, 2001). The model shown
in Figure 1 is used to find a match in the image. Since
it represents a view of the torso-head block, it can be
used only to find the position of the points p
H
and
p
P
, but it cannot say us anything about the torso di-
rection, for example. The ICP is modified to take into
account head color information. We consider only
those correspondence for the head that are compati-
ble with the color distribution estimated in the train-
ing phase. Moreover, since these correspondences,
once found, are characterized by a greater amount of
information, they have a greater weight, so contribut-
ing more in determining the rigid transformation in
the ICP minimization error phase.
For p
F
we cannot use the same technique, primar-
ily because the lower part of the body is not always
visible due to occlusions or to the greater sensitive-
ness to false negatives. Since we are interested in
finding a point that represents the feet point of contact
with the floor, we can simply project the lower points
on the ground level, when at least part of the legs is
visible. When the person legs are utterly occluded
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
264
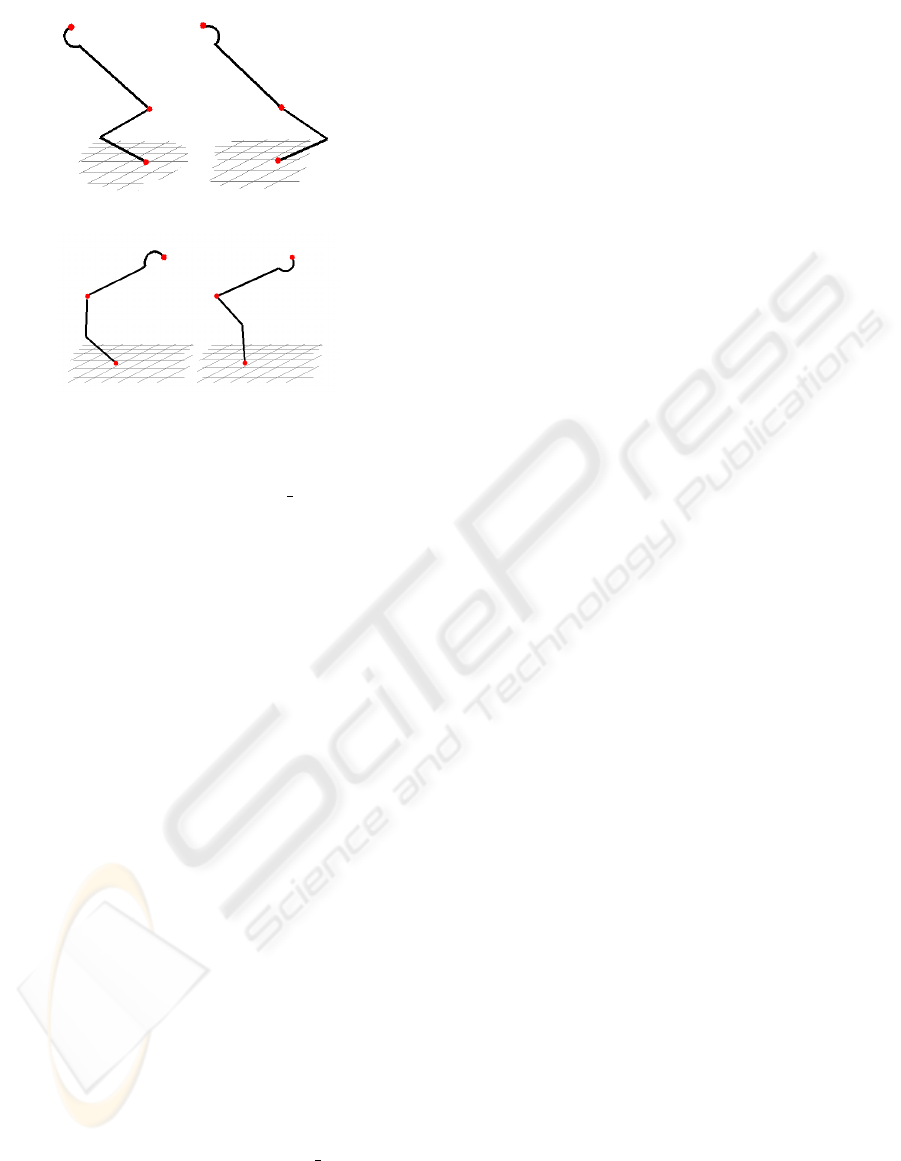
a)
b)
Figure 2: Ambiguities.
(this is verified by the function leg occluded in
the algorithm), for example if he/she is sitting behind
a desk, we can anyway model the observation as a
Gaussian distribution with center in the projection on
the ground of p
P
and variance in inverse relation with
the height of the pelvis from the floor.
After computation of the principal points for each
frame, there are still problems that need to be solved
in order to have good performance in classification.
First, detection of these points is noisy given the
noisy data coming from the tracker. To deal with these
errors it is necessary to filter data over time and to
this end, we use a Kalman Filter to update these val-
ues over time. In our implementation we assumed the
three components to be independent and a constant
velocity model for each of them. This approximation
is a good compromise between necessity of filtering
and computational cost.
Second, ambiguities may arise in determining
poses from three points. To solve this problem we
need to determine the symmetry plane τ of the person
(that reduces ambiguities to up to two cases, consider-
ing the constraint on the knee joint), and a likelihood
function that evaluates probability of different poses.
The plane passing for the three points can differ from
the symmetry plane due to perception and detection
errors. In order to have more accurate data, we need
to consider the configuration of the three points, for
example co-linearity of these points increases noise in
detecting the symmetry plane. In our implementation
we used another temporal filter (filter
plane)on
the symmetry plane that suitably takes into account
co-linearity of these points. Then, principal points are
projected onto the filtered symmetry plane (
ˆ
Π
).
Given the symmetry plane τ
, we still have two dif-
ferent solutions, corresponding to the two opposite
orientations of the person. To determine which one
is correct we use a function that computes the likeli-
hood of the orientation of the person. An example is
given in Figure 2, where the two orientations in two
situations are shown. We fix a reference system for
the points in the symmetry plane and the orientation
likelihood function measures the likelihood ρ that the
person is oriented on the left. For example, the likeli-
hood for the situation in Figure 2 a) is ρ =0.6 (thus
slightly preferring the leftmost posture), while the one
in Figure 2 b) is ρ =0since the leftmost pose is very
unnatural. The likelihood function can be instantiated
with respect to the environment in which the applica-
tion runs. For example, in an office-like environment
likelihood of situation in Figure 2 a) may be increased
(thus preferring more the leftmost posture). By fil-
tering these values uniformly through time, we get a
reliable estimate of the orientation of the person φ
.
Finally, from
ˆ
Π
, τ
, φ
the algorithm computes the
angles of the model and hence z, that is used in the
subsequent classification phase. Moreover, Π
, τ
, φ
denote the internal state of the procedure that will be
used in the next cycle.
5 POSTURE CLASSIFICATION
Our approach to posture classification is mainly char-
acterized by the fact that it is not made upon low-level
data, but on higher level ones that are retrieved from
each image as result of a model matching process.
The main feature is that the measured components
are directly connected to human postures, thus mak-
ing easier the classification phase. In particular, the
probability distributions of each pose in the space
formed by the five parameters extracted as described
in the previous section are uni-modal. Moreover, the
distributions for the different postures are well sepa-
rated each other thus making this space very effective
for classification. However, temporal integration of
these information allows for a more robust classifier
since it allows for modeling also transition between
postures.
Therefore, we have implemented two classification
procedures (that are compared in Section 6). They
use an observation vector z
t
=< α,β,γ,δ,h
norm
>,
which contains the five parameters of the model, and
the distribution probabilities P (z
t
|γ) for each posture
that needs to be classified γ ∈ Γ={U, S, B, K, L},
i.e., UP, SIT, BENT, ON KNEE, LAID. These distri-
butions can be acquired by analyzing sample videos
or synthetic model variations. In our case, since val-
ues z
t
are computed by model matching, we used
synthetic model variations and manually classified a
set of postures of the model to determine P (z
t
|γ) for
HUMAN POSTURE TRACKING AND CLASSIFICATION THROUGH STEREO VISION
265

each γ ∈ Γ. In addition, due to the uni-modal nature
of such distributions, they have been approximated as
normal distributions.
The first classification procedure just considers the
maximum likelihood of the current observation, i.e.
γ
ML
= argmax
γ∈Γ
P (z
t
|γ)
The second classification procedure makes use of a
Hidden Markov Model (HMM) defined by a discrete
status variable assuming values in Γ. Probability dis-
tribution for the postures is thus given by
P (γ
t
|z
t:t
0
) ∝ P (z
t
|γ
t
)
γ
∈Γ
P (γ
t
|γ
)P (γ
|z
t−1:t
0
)
P (γ|z
t
0
) ∝ P (z
t
0
|γ) P (γ)
The transition probabilities P (γ
t
|γ
) are used to
model transitions between the postures, while P (γ)
is the a priori probability of each posture. A discus-
sion about the choice of these distributions is reported
in Section 6.
6 EXPERIMENTAL EVALUATION
Experimental evaluation of the approach presented in
this paper has been performed by using an experimen-
tal setting formed by a stereo camera placed about
3 meter high from the ground pointing down about
30 degrees from the horizon. A stereo vision based
tracker has been used to provide XYZ-RGB data of
tracked people in the scene. The tracker processes
640x480 images at about 10 frame per seconds, thus
giving us high resolution and high rate data. The sys-
tem described in this paper has an average computa-
tion cycle of about 180 ms on a 1.7 GHz CPU. There-
fore in combination with the tracker the overall sys-
tem can process about 3.5 frames per second. More-
over, code optimization and more powerful CPUs will
allow to use the system in real-time.
The main objective of the experiments reported
here is to evaluate the robustness of the system with
respect to occlusions and different view points, as
well as the effectiveness of the filter provided by
HMM.
The experiments have been performed by consid-
ering a set of video sequences, chosen in order to
cover all the postures we are interested in, with dif-
ferent people, in different environmental conditions,
different orientations and also considering partial oc-
clusions. These videos have been grouped in differ-
ent ways in order to highlight different characteris-
tics of the system as explained later. For each video
we built a ground truth by manually labeling frames
with the postures assumed by the person. Moreover,
since during transitions from one posture to another
it is difficult to provide a ground truth (and are also
typically not interesting in the applications), we have
defined transition intervals, during which there is a
passage from one posture to another. During these in-
tervals the system is not evaluated. The total number
of frames that have been used to compute classifica-
tion rates in all the experiments is 2085.
For the classification based on HMM we have cho-
sen a priori probability of 0.8 for the standing posi-
tion and 0.2/(|Γ|−1) for the others. This models
situations in which a person enters the scene in an
initial standing position. The transition probabilities
T
ij
= P (γ
t
= i|γ
t−1
= j) have been set to
⎛
⎜
⎜
⎜
⎝
0.787 0.079 0.047 0.039 0.047
0.147 0.827 0.019 0.004 0.004
0.133 0.033 0.767 0.033 0.033
0.142 0.015 0.027 0.769 0.046
0.148 0.037 0.037 0.037 0.741
⎞
⎟
⎟
⎟
⎠
that have been manually computed by considering
more likely transitions from one posture to another,
assuming “normal activities” in an office-like envi-
ronment. In fact, the above matrix is the result of
averaging between different transition matrices deter-
mined independently by different people. Obviously,
this can be customized according to specific applica-
tion requirements.
Robustness to different view points has been tested
by analyzing postures with people in different orienta-
tions with respect to the camera. Here we present the
results of tracking bending postures in five different
orientations with respect to the camera. For each of
the five orientations we took three videos of about 200
frames in which the person entered the scene, bent to
grab an object on the ground and then raised up ex-
iting the scene. Table 1 shows classification rates for
each orientation. The first row presents results ob-
tained with maximum likelihood, while the second
one shows results obtained with HMM. There are very
small differences between the five rows, thus showing
that the approach is able to correctly deal with differ-
ent orientations. Also improvement in performance
due to HMM is not very high. This is not surprising
since postures are well separated in the classification
space defined by the parameters of the model.
To prove robustness of the system to partial oc-
clusions, we make experiments comparing situations
without occlusions and situations with partial occlu-
sions. Here we consider occlusions of the lower part
of the body, while we assume the head and the up-
per part of the torso are visible. This is a reasonable
assumption since the camera is placed in a higher po-
sition than people. In Figure 3 we show a few frames
of two data sets used for evaluating the recognition of
the sitting posture without and with occlusions and in
Table 2 classification rates for the different postures.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
266
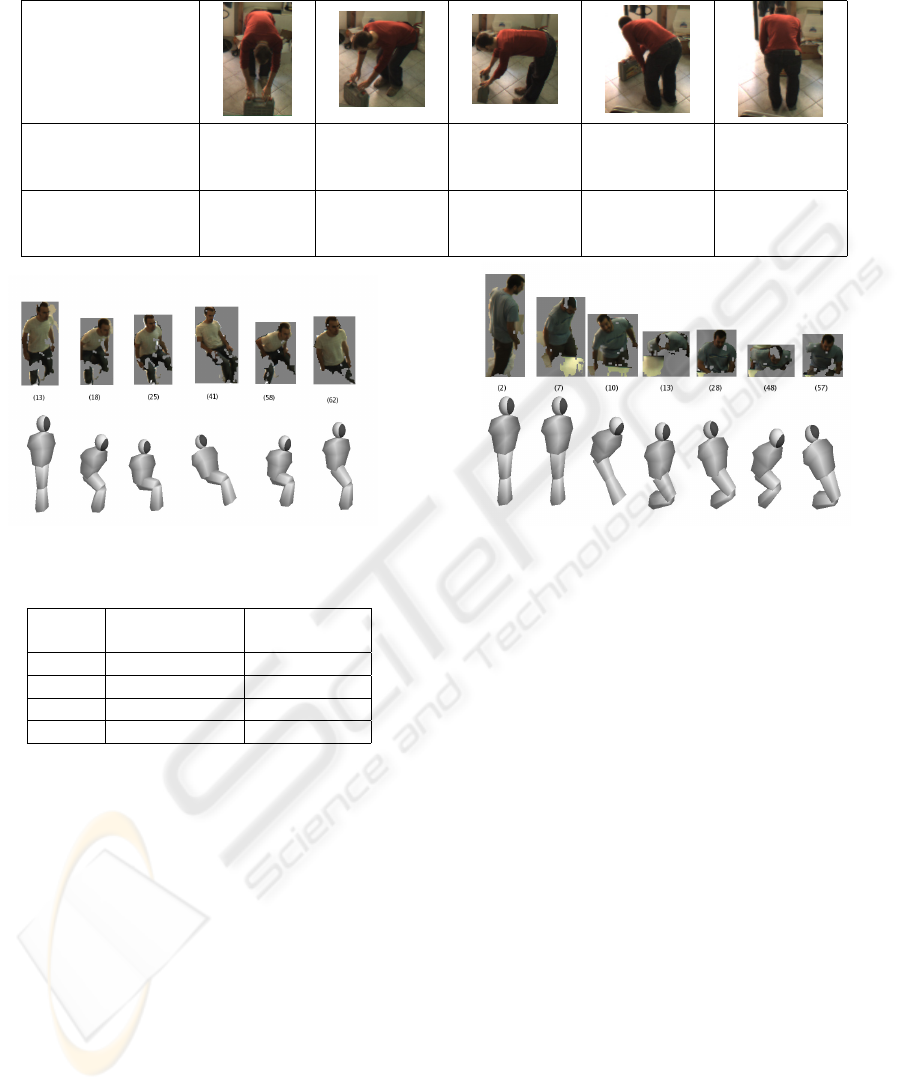
Table 1: Classification rate from different view points.
Orientation
Maximum
Likelihood
86.7 % 83.1 % 89.7 % 89.7 % 88.9 %
HMM 91.6 % 86.0 % 91.2 % 89.7 % 90.5 %
Figure 3: People sitting on a chair (non-occluded vs. occluded).
Table 2: Classification rates without and with occlusions.
No occlusions
Partial
occlusion
UP 91.5 % 91.5 %
SIT 88.3 % 81.6 %
BENT 82.8 % 93.3 %
LAID 100.0 % 100.0 %
It is interesting to notice that we have very simi-
lar results in the two columns (in some cases higher
classification rate under partial occlusions). The main
reason is that, when feet are not visible, they are pro-
jected on the ground from the pelvis joint p
P
and
this corresponds to determine correct angles for the
postures UP and BENT. Moreover, LAID posture is
mainly determined from the height parameter that is
also not affected by partial occlusions. For the pos-
ture ON KNEE we have not performed these exper-
iments for two reasons: i) it is difficult to be recog-
nized even without occlusions (see discussion below);
ii) it is not correctly identified in presence of occlu-
sions since this posture assumes the feet to be not
below the pelvis. These results thus show an overall
good behavior of the system in recognizing postures
in presence of partial occlusions, that are typical for
example during office-like activities.
Finally, Table 3 presents the total confusion matrix
of all the experiments performed. The presence of no
errors in the LAID posture is given by the fact that the
height of the person from the ground is the most dis-
criminant measure and this is reliably computed by
stereo vision, while the ON KNEE posture is very dif-
ficult because it relies on tracking the feet, which is
very noisy and unreliable with the stereo tracker we
have used.
The values of classification obtained by using
frame by frame classification are slightly lower, re-
spectively, 89.5 %, 80.6 % , 88.2 %, 51.7 %, 100 %
for the five considered postures. Thus, the HMM
slightly improve the performance, however maximum
likelihood is still effective, confirming the effective-
ness in the choice of the classification space and the
ability of the system to correctly track the parameters
of the human model. In the BENT posture we had
better results without the HMM, this was due to a de-
lay in one of the videos in passing from standing to
bending position, probably indicating that the transi-
tion matrix used here can be optimized for achieving
better results. This also shows a possible drawback
of using temporal filters: they may introduce delays
in switching between postures and thus must be fine
tuned.
From the analysis of the classification results, we
have highlighted situations in which errors occur. A
first class of errors is due to bad segmentation: 1)
when this occurs during the initial training phase, a
non-correct initialization of the model affects model
HUMAN POSTURE TRACKING AND CLASSIFICATION THROUGH STEREO VISION
267
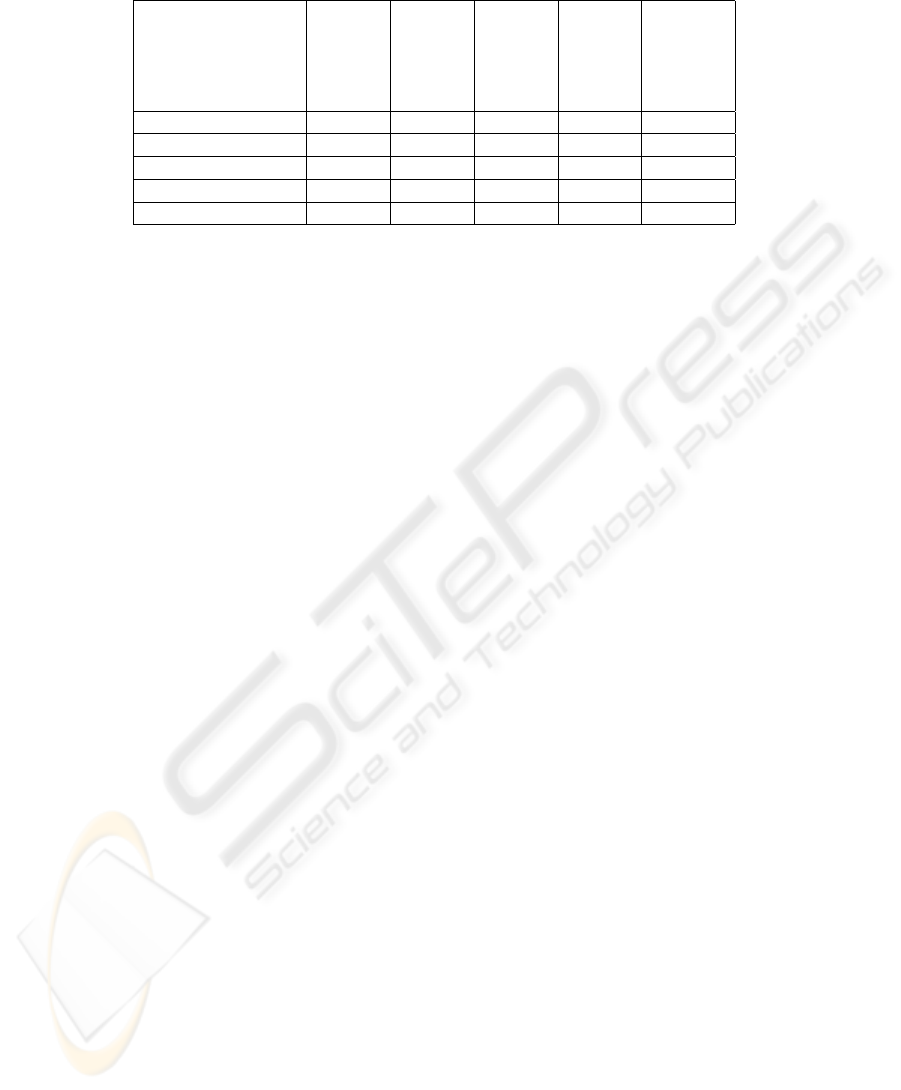
Table 3: Overall confusion matrix with HMM.
System
Ground
Truth
UP SIT BENT KNEE LAID
UP 93.5 % 1.0 % 5.4 % 0.0 % 0.0 %
SIT 2.1 % 84.7 % 7.4 % 5.8 % 0.0 %
BENT 4.2 % 8.3 % 85.8 % 0.5 % 1.2 %
KNEE 0.0 % 3.3 % 45.0 % 51.7 % 0.0 %
LAID 0.0 % 0.0 % 0.0 % 0.0 % 100.0 %
matching in the following frames, thus producing er-
rors in the computation of the parameters that are used
for classification; 2) segmentation errors in the up-
per part of the body (head and torso) may also be the
cause of failures in the model matching performed by
the ICP algorithm. These errors are generated by the
underlying tracking system and in case they are not
acceptable for an application, it is necessary to tune
the tracker and/or to add additional processing in or-
der to provide for better segmentation.
Errors that are more related to our approach are
mostly determined by incorrect matching of the ICP
algorithm, specially in situations where movements
are too quick. This is a general problem for many
systems based on tracking. A minor problem arises
when the person do not pass through non-ambiguous
postures. In fact, until disambiguation is not achieved
(as described in Section 4), posture recognition may
be wrong.
7 CONCLUSIONS
In this paper we have presented a method for human
posture tracking and classification that relies on the
segmentation of a stereo vision based people tracker.
The input to our system is a set of XYZ-RGB data
extracted by the tracker and the system is able to clas-
sify several main postures with high efficiency, good
accuracy and high degree of robustness to various sit-
uations. The approach is based on the computation of
significant parameters for posture classification, that
is performed by using an ICP algorithm for 3D model
matching; 3D tracking of these points over time is
then performed by using a Kalman Filter in order to
increase robustness to perception noise; and finally a
Hidden Markov Model is used to classify postures.
The experimental results reported here show the
feasibility of the approach and its robustness to oc-
clusions and different points of view that makes the
system applicable to a larger number of situations.
One of the problems experienced was that the
tracker system works very well when people are in
standing position, while quality of data worsen when
people sit, lay down, or bend. While the quality
of segmentation does not affect classification of the
LAID posture (that is mainly determined by the pixels
height from the ground), segmentation errors are the
main causes of classification errors for the other pos-
tures. Classification errors may be reduced by pro-
viding feedback from the posture classification to the
tracker. In fact, given these information the tracker
could adapt recognition procedure in order to provide
better data.
Additional postures may be considered: interesting
cases would be WALKING and JUMPING that can be
detected by analyzing the trajectory of the principal
point for the head p
H
. Also temporal analysis of the
model parameters can be useful to determine for ex-
ample different ways in which people fall down.
REFERENCES
Bahadori, S., Grisetti, G., Iocchi, L., Leone, G. R., and
Nardi, D. (2005). Real-time tracking of multiple peo-
ple through stereo vision. In Proc. of IEE Interna-
tional Workshop on Intelligent Environments.
Beymer, D. and Konolige, K. (1999). Real-time tracking of
multiple people using stereo. In Proc. of IEEE Frame
Rate Workshop.
Boulay, B., Bremond, F., and Thonnat, M. (2005). Pos-
ture recognition with a 3d human model. In Interna-
tional Conference on Crime Detection and Prevention
(ICDP).
Bregler, C. and Malik, J. (1998). Tracking people with
twists and exponential maps. In IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR’98).
Cucchiara, R., Grana, C., and Prati, A. (2005a). Probabilis-
tic posture classification for human-behavior analysis.
IEEE Transactions on Systems, Man, and Cybernet-
ics, 35(1):42–54.
Cucchiara, R., Prati, A., and Vezzani, R. (2005b). Posture
classification in a multi-camera indoor environment.
In Proc. of IEEE International Conference on Image
Processing (ICIP’05).
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
268

Demirdjian, D., Ko, T., and T.Darrel. (2003). Constraining
human body tracking. In International Conference on
Computer Vision (ICCV’03).
Gavrila, D. M. (1999). The visual analysis of human move-
ment: A survey. Computer Vision and Image Under-
standing, 73(1):82–98.
Goldmann, L., Karaman, M., and Sikora, T. (2004). Hu-
man body posture recognition using mpeg-7 descrip-
tors. Visual Communications and Image Processing.
Grammalidis, N., Goussis, G., Troufakos, G., and Strintzis,
M. G. (2001). 3-d human body tracking from depth
images using analysis by synthesis. In Proc. of
IEEE International Conference on Image Processing
(ICIP’01).
Iocchi, L. and Bolles, R. C. (2005). Integrating plan-view
tracking and color-based person models for multiple
people tracking. In Proc. of IEEE International Con-
ference on Image Processing (ICIP’05).
Moeslund, T. B. and Granum, E. (2001). A survey of com-
puter vision-based human motion capture. Computer
Vision and Image Understanding: CVIU, 81(3):231–
268.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the icp algorithm. Proc. of 3rd International Con-
ference on 3D Digital Imaging and Modeling.
Sminchisescu, C. and Triggs, B. (2003). Kinematic jump
processes for monocular 3d human tracking. Proc.
of the Conference on Computer Vision and Pattern
Recognition.
HUMAN POSTURE TRACKING AND CLASSIFICATION THROUGH STEREO VISION
269
