
HEAD ORIENTATION AND GAZE DETECTION FROM A SINGLE
IMAGE
Jeremy Yirmeyahu Kaminski
Computer Science Department, Holon Academic Institute of Technology,Holon, Israel
Adi Shavit and Dotan Knaan
Gentech Corporation, Israel Labs, Jerusalem, Israel
Mina Teicher
Bar-Ilan University,Ramat-Gan, Israel
Keywords:
Head Orientation, Gaze, Resultant.
Abstract:
Head orientation is an important part of many advanced human-machine interaction systems. We present a
single image based head pose computation algorithm. It is deduced from anthropometric data. This approach
allows us to use a single camera and requires no cooperation from the user. Using a single image avoids the
complexities associated with of a multi-camera system. Evaluation tests show that our approach is accurate,
fast and can be used in a variety of contexts. Application to gaze detection, with a working system, is also
demonstrated.
1 INTRODUCTION
Numerous systems need to compute head motion and
orientation. Instances are driver attention monitor-
ing and human-computer interface for multimedia or
medical purposes.
Therefore, for a large range of applications, the
need for a simple and efficient algorithm for comput-
ing head orientation is crucial. Systems that must re-
cover at some stage some information on the 3D posi-
tion of the user’s head, run by definition in a complex
environment, because of the variety of human faces
and behaviors. That is the reason why, such a system
will gain in stability and usuability if the underlying
algorithm uses a simple setting. In that context, it is
worth noting that our algorithm is based on a single
camera and does not require from the user any cali-
bration.
Moreover, we shall present how our algorithm for
head orientation can be used for gaze detection too.
We describe an overall system, which performs gaze
detection from a single image. Our system turned out
to be accurate and fast, which makes it convenient for
a large variety of applications.
1.1 Comparison With Other
Approaches
Before introducing the core of our method, we present
a short comparison with previous works. Since the
problem of head position and gaze detection has re-
ceived a huge amount of attention in the past decade,
we do not pretend to establish a comprehensive re-
view of previous work. However we consider here-
after what seems to be the most relevant references to
show the novelty of our approach.
The large number of proposed algorithms for gaze
detection proves that no solution is completely satis-
fying. In (Glenstrup and Engell-Nielsen, 1995), one
can find a good survey of several gaze detection tech-
niques. In (Ji and Yang, 2002; A.Perez, 2003), one
can find a stereo system for gaze and face pose com-
putation, which is particularly suitable for monitor-
ing driver vigilance. Both systems are based on two
cameras, one being a narrow field camera (which pro-
vides a high resolution image of the eyes by tracking
a small area) and the second being a large field cam-
era (which tracks the whole face). Besides the com-
putationally complex difficulties arising from multi-
ple cameras and controlling these pan-tilt cameras,
the system hardware is quite costly. In (T. Ohno and
Yoshikawa, 2002), a monocular system is presented,
85
Yirmeyahu Kaminski J., Shavit A., Knaan D. and Teicher M. (2006).
HEAD ORIENTATION AND GAZE DETECTION FROM A SINGLE IMAGE.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 85-92
DOI: 10.5220/0001375800850092
Copyright
c
SciTePress

which uses a personal calibration process for each
user and does not allow large head motions. Limit-
ing the head motion is typical for systems that utilize
only a single camera. (T. Ohno and Yoshikawa, 2002)
uses a (motorized) auto-focus lens to estimate the dis-
tance of the face from the camera. In (J.G. Wang and
Venkateswarku, 2003), the eye gaze is computed by
using the fact that the iris contour, while being a cir-
cle in 3D is perspectively an ellipse in the image. The
drawback in this approach is that a high resolution im-
age of the iris area is necessary. This severely limits
the possible motions of the user, unless an additional
wide-angle camera is used.
In this paper we introduce a new approach with
several advantages. The system is monocular, hence
the difficulties associated with multiple cameras are
avoided. The camera parameters are maintained con-
stant in time. The system requires no personal cali-
bration and the head is allowed to move freely. This is
achieved by using a model of the face, deduced from
anthropometric features. This kind of method has al-
ready received some attention in past (T. Horprasert
and Davis, 1997; Gee and Cipolla, 1994a; Gee and
Cipolla, 1994b). However, our approach is simpler,
requires less points to be tracked and is eventually
more robust and practical.
In (Gee and Cipolla, 1994a; Gee and Cipolla,
1994b), the head orientation is estimated under the as-
sumption of the weak perspective image model. This
algorithm works using four points: the mouth cor-
ners and the external corners of the eyes. Once those
points are precisely detected, the head orientation is
computed by using the ratio of the lengths L
e
and L
f
,
where L
e
is the distance between the external eyes
corners and L
f
between the mouth and the eyes. In
(T. Horprasert and Davis, 1997), a five points algo-
rithm is proposed to recover the 3D orientation of
the head, under full perspective projection. The in-
ternal and external eyes corners provide four points,
while the fifth point is the botton of the nose. The
first four points approximately lie on a line. There-
fore the authors use the cross-ratio of these points as
a an algebraic constraint on the 3D orientation of the
head. It is worth noting that the cross-ratio is known
to be very sensitive to noise. Consider for exam-
ple, four points A, B, C, D lying on the x-axis which
x-coordinates are respectively 5, 10, 15, 20. These
points can be typically the eye corners. Then the
cross-ratio [A, B, C, D]=(5− 15)/(5− 20) × (10 −
20)/(10 − 15) = 10/3=3.333.NowifA is de-
tected at 4 and B at 11, then the cross-ratio becomes
[A, B, C, D]=(4− 15)/(5 − 20) × (11 − 20)/(11 −
15) = 99/64 = 1.54. This simple computation
shows that using the cross-ratio as a constraint on the
3D structure, requires detection with a precision gen-
erally beyond the capability of a vision system.
In contrast, our approach is based on three points
only and works with a full perspective model. The
three points are the eye centers and the middle point
between the nostrils. Using these three points, we can
compute several algebraic constraints on the 3D head
orientation, based on a anthropomorphic model of the
human face. These constraints are explicitly formu-
lated in section 2.
Once the head orientation is recovered, further
computations are possible. In this paper, we show an
application to gaze detection. This approach, of a me-
chanically simple, automatic and non-intrusive sys-
tem, allows eye-gazing to be used in a variety of ap-
plications where eye-gaze detection was not an option
before. For example, such a system may be installed
in mass produced cars. With the growing concern of
car accidents, customers and regulators are demand-
ing safer cars. Active sensors that may prevent acci-
dents are actively perused. A non-intrusive, cheaply
produced, one-size-fits-all eye-gazing system could
monitor driver vigilance at all times. Drowsiness and
inattention can immediately generate alarms. In con-
junction with other active sensors, such as radar, ob-
stacle detection, etc. the driver may be warned of an
unnoticed hazard outside the car.
Psychophysical and psychological tests and exper-
iments with uncooperative subjects such as children
and/or primates, may also benefit from such a static
(no moving parts) system, which allows the subject
to focus solely on the task at hand while remaining
oblivious to the eye-gaze system.
In conjunction with additional higher-level sys-
tems, a covert eye-gazing system may be useful in se-
curity applications. For example, monitoring the eye-
gaze of ATM clients. In automated airport checkin
counters, such a system may alert of suspiciously be-
having individuals.
The paper is organized as follows. In section 2,
we present the core of the paper, the face model that
we use and how this model leads to the computation
of the Euclidean face 3D orientation and position. We
present simulations, that show the results are robust to
error in both the model and the measurements. Sec-
tion 3 gives an overview of the system, and some ex-
periments are presented.
2 FACE MODEL AND
GEOMETRIC ANALYSIS
2.1 Face Model
Following the statistical data taken from (Farkas,
1994), we assume the following model of a generic
human face. Let A and B be the centers of the eyes,
and let C be the middle point between the nostrils.
VISAPP 2006 - IMAGE UNDERSTANDING
86

C
AB
Figure 1: The face model is essentially based on the fact
that the triangle Eye-Nose Bottom-Eye is isosceles.
Then we assume the following model:
d(A, C)=d(B, C) (1)
d(A, B)=rd(A, C) (2)
d(A, B)=6.5cm (3)
where r =1.0833. The two first equations allow
computing the orientation of the face, while the third
equation is necessary for computing the distance be-
tween the camera and the face. The face model is
illustrated in figure 1. The data gathered in (Farkas,
1994) shows that our model is widely valid over the
human population. Of course variations exist, but the
simulations presented in section 2.5 show that our al-
gorithm is quite robust over the whole spectrum of
human faces.
2.2 3D Face Orientation
Let M be the camera matrix. All the computations are
done in the coordinate system of the camera. There-
fore the camera matrix has the following expression:
M = K[I; 0],
where K is the matrix of internal parameters (Hartley
and Zisserman, 2000; Faugeras and Luong, 2001).
Let (a, b, c) be the projection of (A, B, C) onto
the image. In the equations below, the image points
a, b, c are given by their projective coordinates in the
image plane, while the 3D points A, B, C are given
by their Euclidean coordinates in R
3
. Given these no-
tations, the projection equations are:
a ∼ KA (4)
b ∼ KB (5)
c ∼ KC (6)
where ∼ means equality up to a scale factor. There-
fore the 3D points are given by the following expres-
sions:
A = αK
−1
a (7)
B = βK
−1
b (8)
C = γK
−1
c (9)
where α, β, γ are unknown scale factor. These could
also be deduced by considering the points at in-
finity of the optical rays generated by the image
points a, b, c and the camera center. These points
at infinity are simply given in projective coordinates
by: [K
−1
a, 0]
t
, [K
−1
b, 0]
t
, [K
−1
c, 0]
t
. Then the
points A, B, C are given in projective coordinates by
[αK
−1
a, 1]
t
, [βK
−1
b, 1]
t
, [γK
−1
c, 1]
t
. These ex-
pressions naturally yield the equations (7), (8), (9)
giving the Euclidean coordinates of the points.
Plugging these expressions of A, B and C into the
two first equations of the model (1) and (2), leads to
two homogeneous quadratic equations in α, β, γ:
f(α, β, γ)=0 (10)
g(α, β, γ)=0 (11)
Thus finding the points A, B and C is now reduced
in finding the intersection of two conics in the projec-
tive plane. Moreover since no solution is on the line
defined by γ =0(since the nose of the user is not lo-
cated at the camera center!), one can reduce the com-
putation of the affine piece defined by γ =1. Hence
we shall now focus our attention on the following sys-
tem:
f(α, β, 1) = 0 (12)
g(α, β, 1) = 0 (13)
This system defines the intersection of two conics
in the affine plane. The following subsection is de-
voted to the computation of the solutions of this sys-
tem.
2.3 Computing the Intersection of
Conics in the Affine Plane
For sake of completeness, we shall recall shortly one
way of computing the solutions of the system above.
For more details, see (Sturmfels, 2002). Consider first
two polynomials f, g ∈ C[x]. The resultant gives a
way to know if the two polynomials have a common
root. Write the polynomials as follows:
f = a
n
x
n
+ ... + a
1
x + a
0
g = b
p
x
p
+ ... + b
1
x + b
0
The resultant of f and g is a polynomial r, which
is a combination of monomials in {a
i
}
i=1,...,n
and
{b
j
}
j=1,...,p
with coefficients in Z, that is r ∈
Z[a
i
,b
j
]. The resultant r vanishes if and only if either
a
n
or b
p
is zero or the polynomials have a common
root in C. The resultant can be computed as the de-
terminant of a polynomial matrix. There exist several
matrices whose determinant is equal to the resultant.
The best known and simplest matrix is the so-called
HEAD ORIENTATION AND GAZE DETECTION FROM A SINGLE IMAGE
87

Sylvester matrix, defined as follows:
S(f,g)=
⎡
⎢
⎣
a
n
00... 0 b
p
00... 0
a
n−1
a
n
0 ... 0 b
p−1
b
p
0 ... 0
.
.
.
.
.
. .
⎤
⎥
⎦
Therefore, we have:
r(x)=det(Syl(f, g)).
In addition to this expression which gives a practical
way to compute the resultant, there exists another for-
mula of theoretical interest:
r(x)=a
n
b
p
Π
α,β
(x
f
α
− x
g
β
),
where x
f
α
are the roots of f and x
g
β
are those of g.
It can be shown that the resultant is a polynomial of
degree np.
An important point is that the resultant is also de-
fined and has the same properties if the coefficients of
the polynomials are not only numbers but also poly-
nomials in another variable. Hence, consider now that
f,g ∈ C[x, y] and write:
f = a
n
(x)y
n
+ ... + a
1
(x)y + a
0
(x)
g = b
p
(x)y
p
+ ... + b
1
(x)y + b
0
(x)
(14)
The question is now the following: given a value x
0
of x, do the two polynomials f(x
0
,y) and g(x
0
,y)
have a common root? The answer to this question is
based on the computation of the resultant of f and
g with respect to y (i.e. using the presentation given
by (14)). This is a univariate polynomial in x, denoted
by r(x)=res(f,g,y).
The resultant can be used in many contexts. For
our purpose, we will use it to compute the intersec-
tion points of two planar algebraic curves. Consider
the curve C
1
(respectively C
2
) defined as the set of
points (x, y) which are roots of f(x, y) (respectively
g(x, y)). We want to compute the intersection of C
1
and C
2
. Algebraically, this is equivalent to computing
the common roots of f and g. Therefore, we use the
following procedure:
• Compute the resultant r(x)=res(f,g,y) ∈ C[x].
• Find the roots of r(x): x
1
, ..., x
t
• For each i =1, ..., t, compute the common roots of
f(x
i
,y) and g(x
i
,y) in C[y]: y
i1
, ..., y
ik
i
.
• The intersection of C
1
and C
2
is therefore:
(x
1
,y
11
), ..., (x
1
,y
1k
1
), ..., (x
t
,y
t1
), ..., (x
t
,y
tk
t
).
In our context, the resultant r is polynomial of de-
gree 4 and so t ≤ 4 and k
i
≤ 2. To complete the pic-
ture, we just need to mention an efficient and reliable
way to compute the roots of a univariate polynomial.
The algorithm that we will describe is very efficient
and robust for low degree polynomials. Given a uni-
variate polynomial p(x)=a
n
x
n
+... +a
1
x+ a
0
, one
can form the following matrix, called the companion
matrix of p:
C(p)=
010... 0
001... 0
.
.
.
.
.
.
.
.
.
−a
0
/a
n
−a
1
/a
n
−a
2
/a
n
... −a
n−1
/a
n
A short computation shows that the characteristic
polynomial of C(p) is equal to −
1
a
n
p. Thus the roots
of p are exactly the eigenvalues of C(p). This pro-
vides one practical way to compute the roots of a uni-
variate polynomial.
2.4 3D Face Orientation
Therefore, we solve the system S defined by equa-
tions (12) and (13) using the approach presented
above. By Bezout’s theorem (or simply by looking
at the degree of the resultant), we know that there are
at most 4 complex solutions to this system. Experi-
ments show that a system generated by the image of
a human face has only two real roots. The ambiguity
between these two roots is easily handled, since one
solution leads to non realistic eye-to-eye distance. Let
(α
0
,β
0
) be the right solution. Then the points A, B
and C are known up to a unique scale factor. We shall
denote A
0
, B
0
and C
0
the points obtained by the so-
lution (α
0
,β
0
), Thus we have the following expres-
sion:
A
0
= α
0
K
−1
a (15)
B
0
= β
0
K
−1
b (16)
C
0
= K
−1
c (17)
Thus we have the following relations too: A = γA
0
,
B = γB
0
and C = γC
0
.
The computation of γ is done using the third model
equation (3). Once the face points are computed, we
can compute the distance between the user’s face and
the camera and so the 3D orientation of the face. In-
deed the normal to the plane defined by A, B and C
is given by:
−→
N =
−−→
AB ∧
−→
AC,
where ∧ is the cross product.
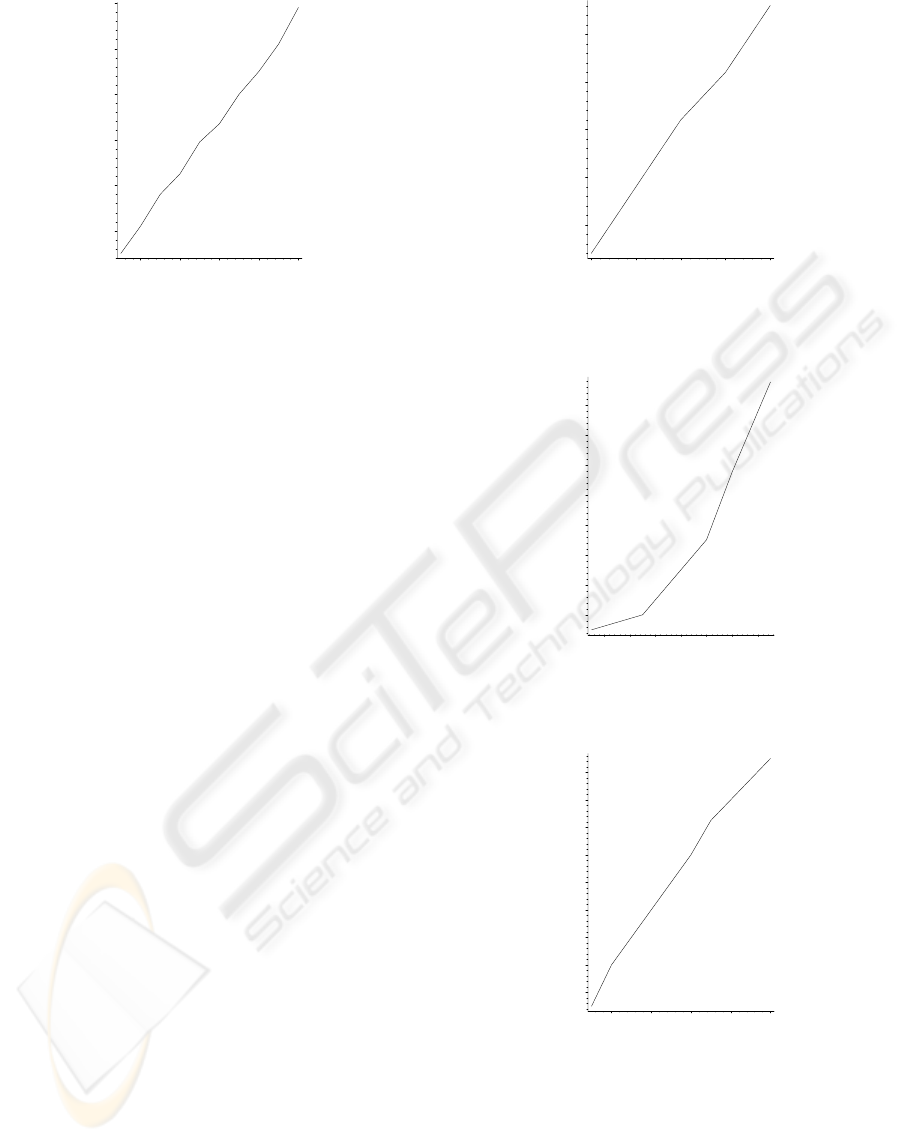
2.5 Robustness to Errors in Model
and Detection
In order to estimate the sensitivity of this algorithm to
errors in model and in detection, we performed sev-
eral simulations. As we shall detail in subsection 3.1,
we use a rather high resolution camera. Therefore in
the simulation, we start from the following setting:
VISAPP 2006 - IMAGE UNDERSTANDING
88
0.2
0.4
0.6
0.8
1
1.2
3D Reconstruction Error (cm)
20 40 60 80 100
Noise Standard Deviation
Figure 2: Influence of the error in focal length.
• The focal length f = 4000 in pixels (which is very
close to the value of the actual camera used in the
system),
• The principal point is at the image center,
• The distance between the camera and the face is
60cm (which is the actual setting of the system).
The simulations are done according to the follow-
ing protocol. An artificial face, defined by three points
in space, say A, B and C, is projected onto a known
camera. Given a parameter p, we perform a perturba-
tion of p by a white Gaussian noise of standard devi-
ation σ. For each value of σ, we perform 100 random
perturbations. For each value of p, obtained by this
process, we compute the error in the 3D reconstruc-
tion as the mean of the square errors.
The first simulation (see figure 2) shows that the
system is very robust to errors in the estimation of the
focal length, since for a noise with standard deviation
of 100 (in pixels), the reconstruction error is 1.2cm,
less than 1% of the distance between the camera and
the user.
The next two simulation aim at measuring the influ-
ence of errors in model. First, the assumed eye-to-eye
distance is corrupted by a Gaussian white noise (fig-
ure 3). The mean value is 6.5cm as mentioned in sec-
tion 2. For a standard deviation of 0.5, which repre-
sents an extreme anomaly with respect to the standard
human morphology, the reconstruction error is about
3.3cm, less than 2% of the distance between the cam-
era and the user. The influence of the human ratio
r, as defined in equation (2), is also tested by adding
a Gaussian white noise, centered at the ”universal”
value 1.0833 (figure 4). For a standard deviation 0.15,
which also represents a very strong anomaly, the re-
construction is 1.75cm, just over 1% of the distance
between the camera and the user.
After measuring the influence of errors in camera
calibration and model, the next step is to evaluate
the sensitivity to input data perturbation. The image
1
1.5
2
2.5
3
3D Reconstruction Error (cm)
0.1 0.2 0.3 0.4 0.5
Noise Standard Deviation
Figure 3: Influence of the error in inter-eyes distance.
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
3D Reconstruction Error (cm)
0.02 0.04 0.06 0.08 0.1 0.12 0.14
Noise Standard Deviation
Figure 4: Influence of the error in human ratio.
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
3D Reconstruction Error (cm)
246810
Noise Standard Deviation
Figure 5: Influence of the error in image points.
points are corrupted by a Gaussian white noise (fig-
ure 5). For a noise of 10 pixels, which is a large er-
ror in detection, the reconstruction error is less 2cm,
about 1.15% of the distance between the camera and
the user.
HEAD ORIENTATION AND GAZE DETECTION FROM A SINGLE IMAGE
89
The accuracy of the system is mainly due to the fact
that the focal length is high (f = 4000 in pixels). In-
deed when computing the optical rays generated by
the image points, as in equations (7,8,9), we use the
inverse of K, which is roughly equivalent to multiply-
ing the image points coordinates by 1/f . Hence the
larger f is, the less impact a detection error has on the
computation.
3 APPLICATION: GAZE
DETECTION SYSTEM
In this section, we show how the ideas presented
above can be used to build a gaze detection system,
that does not require any user calibration or interac-
tion.
3.1 System Architecture
The main practical goal of this work was to create a
non-intrusive gaze detection system, that would re-
quire no user cooperation while keeping the system
complexity low. We use a high-resolution 15 fps,
1392x1040 video camera with a 25mm fixed-focus
lens. The CCD pixel is a square of length equal to
6.45 microns. Thus the focal length is 3875, which
is the same order of magnitude as the value used in
the simulation. This setup allows both a wide field of
view, for a broad range of head positions, and high
resolution images of the eyes. Since we can estimate
the 3D head position from a single image, we can use
a fixed focus lens instead of a motorized auto-focus
lens. This makes the camera calibration simpler and
the calibration of the internal parameters is done only
once. The system uses an IR LED at a known position
to illuminate the user’s face.
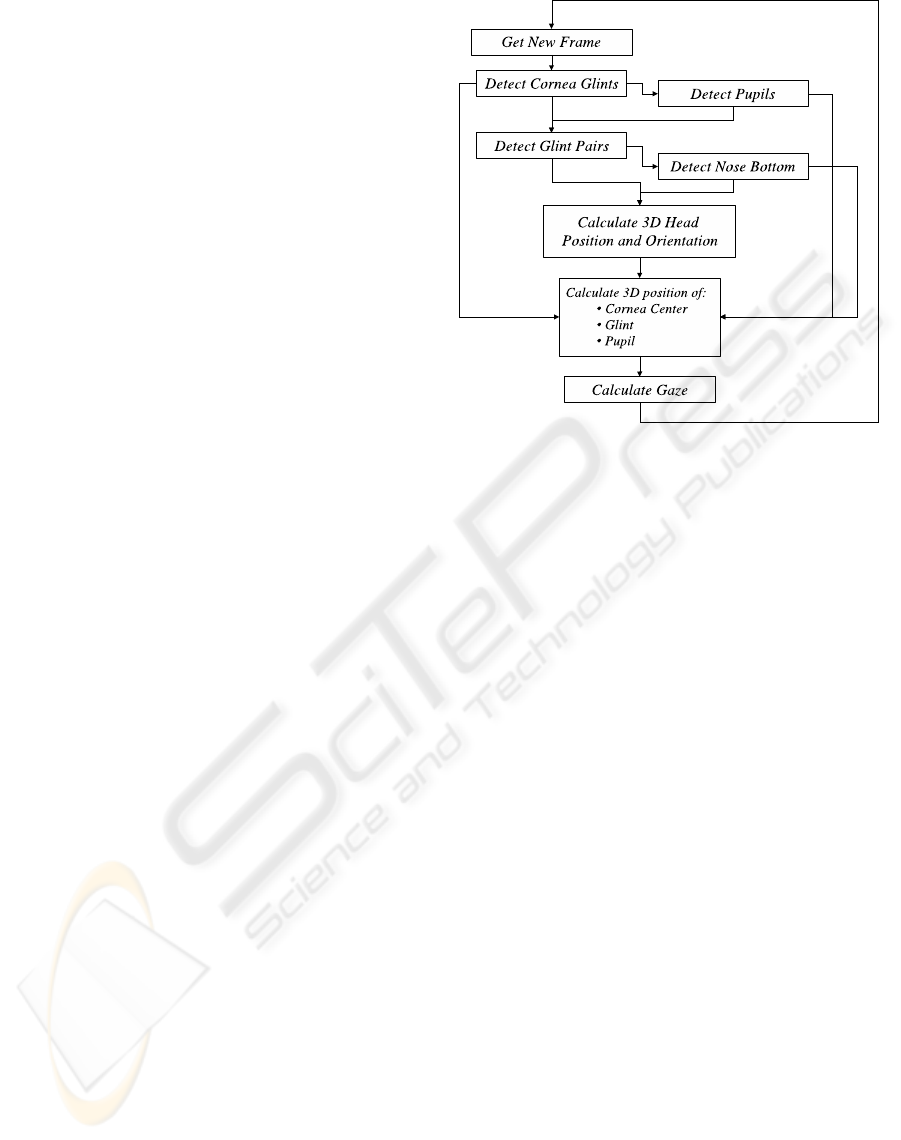
3.2 System Overview
The general flow of the system is depicted in Figure 6.
For every new frame, the glints, that is the reflections
of the LED light from the eye corneas as seen by the
camera, are detected and their corresponding pupils
are found. The search area for the nose is then de-
fined, and the nose bottom is found. Given the two
glints and nose position, we can reconstruct the com-
plete Euclidean 3D face position and orientation rel-
ative to the camera, using the geometric algorithm
presented in section 2. This reconstruction gives us
the exact 3D position of the glints and pupils. Then,
for each eye, the 3D cornea center is computed us-
ing the knowledge of LED position, as shown in fig-
ure 8. This model is similar to the eye model used
in (T. Ohno and Yoshikawa, 2002). The following
Figure 6: The system flow chart, showing the different
stages of the process.
sub-sections 3.3 and 3.4 will describe these stages in
more detail.
3.3 Feature Detection
3.3.1 Glint and Pupil Detection
The detection of the glints is done in several steps.
Glints appear as very bright dots in the image, usu-
ally at the highest possible grayscale values. Us-
ing a thresholding operation on the image yields
multiple candidates for possible glints. Examples
of other sources of similar characteristics are back-
ground lights, facial hair, teeth and lenses and frames
of eye-glasses. We perform multiple filtering stages
to identify the true glints. We filter these candidates
by size, i.e. we select only the small dot-like ones.
Next, we pair-up the remaining candidates and select
only those glint-pairs that satisfy certain constraints
on distances and angles.
We next proceed to the detection of the pupils. The
pupils serve two purposes. They are used to filter out
incorrect glint pairs, and they are required for the cal-
culation of the gaze direction in the later stages of the
algorithm. Pupils appear as round or oval dark regions
inside the eye and are very close to (or behind) the
glints. We search for these dark regions around each
of our detected glints. Glint pairs containing a glint
around which no pupil was found are removed. This
final glint filtering will usually leave us with the fi-
nal true glint pair. Otherwise, we choose the top-most
pair, as empirically, it was shown to be the correct
one.
VISAPP 2006 - IMAGE UNDERSTANDING
90
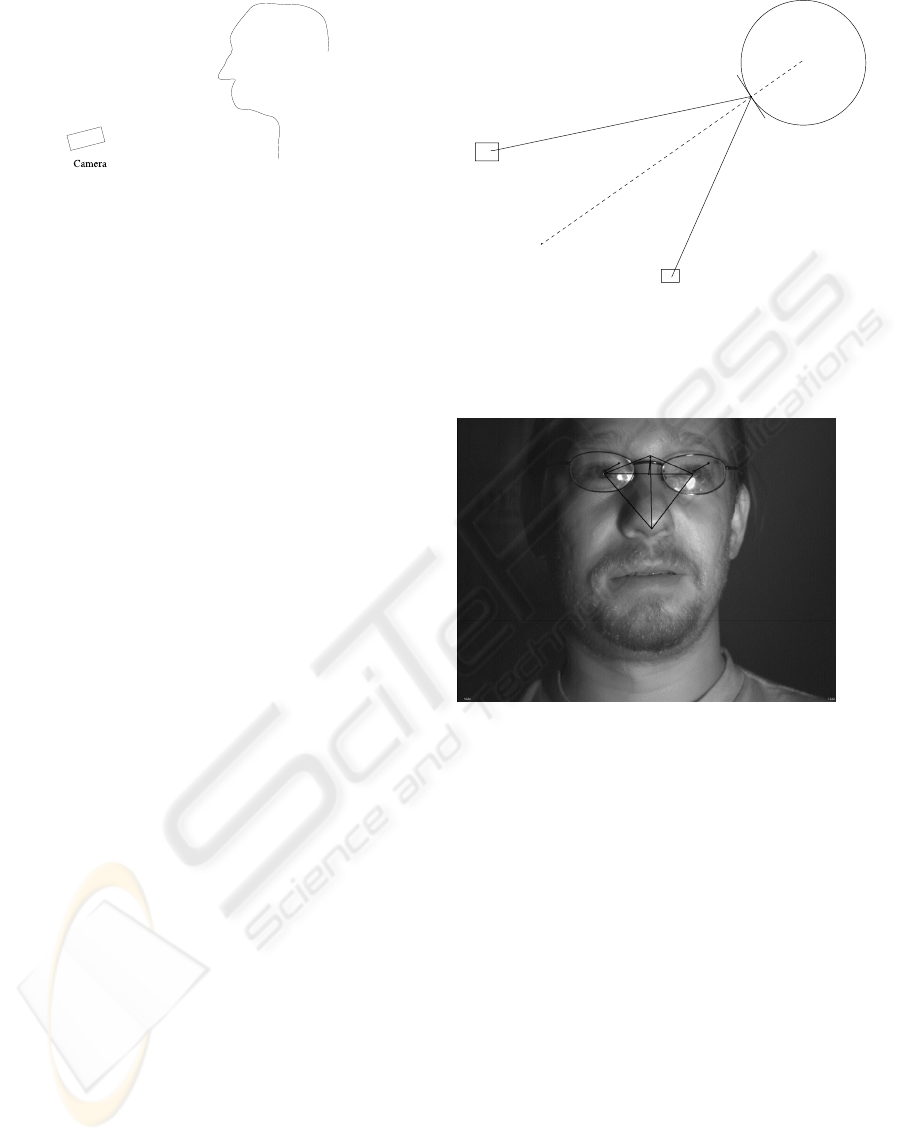
Figure 7: The camera is viewing the eyes and the nostrils.
3.3.2 Nose Detection
The detection of the nose-bottom is done by searching
for dark-bright-dark patterns in the area just below the
eyes. Indeed, the nostrils appear as dark blobs in the
image thanks to the relative position of the camera and
the face as shown in figure 7. The size and orientation
of this search area is determined by the distance and
orientation of the chosen glint-pair. Once dark-bright-
dark patterns are found, we use connected component
blob analysis on this region to identify only those dark
blobs that obey certain size, shape, distance and rela-
tive angle constraints that yield plausible nostrils. The
nose bottom is selected as the point just between the
two nostrils.
3.4 Gaze Detection
Given the glints and the bottom point of the nose, one
can apply the geometric algorithm presented in sec-
tion 2 to compute the 3D face orientation. As seen in
subsection 2.5, even if the glints are not exactly lo-
cated in the center of the eye, the system returns an
accurate answer. Then for each eye, the cornea center
is computed using the knowledge of LED position, as
shown in figure 8.
The gaze line is defined as being the line joining
the cornea center and the pupil center in 3D.
The pupil center is first detected in the image and
computed in 3D as follows. The distance between the
pupil center and the cornea center is a known measure
of the human anatomy. It is equal to 0.45 cm. Con-
sider then a sphere S centered at the cornea center,
with radius equal to 0.45 cm. The pupil center lies
on the optical ray generated by its projection onto the
image and the camera center. This ray intersects the
sphere S in two points. The closest of these points to
the camera is the pupil center.
4 EXPERIMENTS
We show sample images produced by the system,
where one can see the detected triangle, defined by
Cornea
Center
C
amera
LED
Glint in 3D
Figure 8: The cornea center lies on the bisector of the angle
defined by the LED, the glint point in 3D and the camera.
Its exact location is given by the cornea radius, which is
77mm.
Figure 9: The detected triangle, eyes’ centers and the nose
bottom, together with the gaze line.
the eyes’ centers and the bottom points of the nose.
In addition, the gaze line is reprojected onto the im-
ages and rendered by white or blacks arrows, figure 9,
10, 11.
5 DISCUSSION
We proposed an automatic, non-intrusive eye-gaze
system. It uses an anthropomorphic model of the hu-
man face to calculate the face distance, orientation
and gaze angle, without requiring any user-specific
calibration. This generality, as seen in subsection 2.5,
does not introduce large errors into the gaze direction
computation. A patent application (number in Japan:
2005-253778) has been led covering the geometric as-
pects and the features detection.
While the benefits of a calibration-free system al-
low for a broad range of previously impossible appli-
cations, the system design allows for easy plugging of
HEAD ORIENTATION AND GAZE DETECTION FROM A SINGLE IMAGE
91
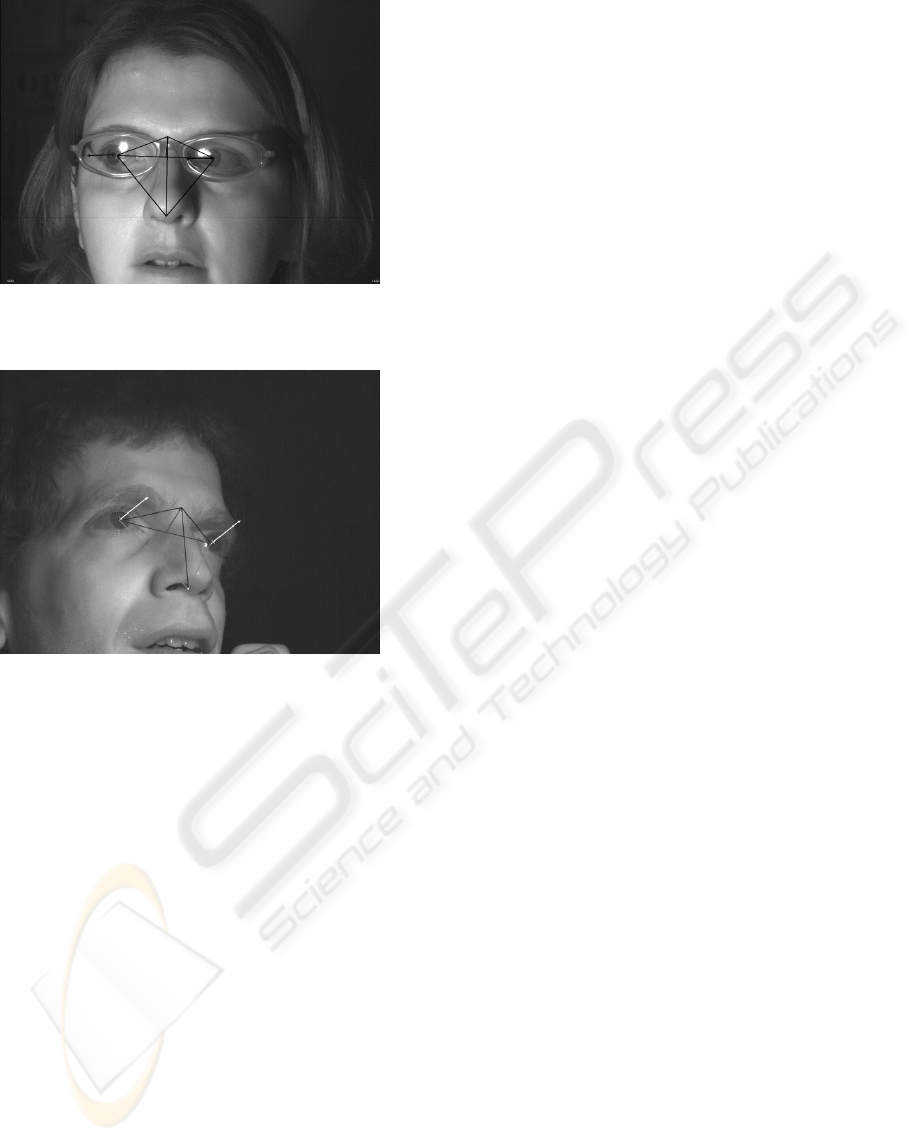
Figure 10: The detected triangle, eyes’ centers and the nose
bottom, together with the gaze line.
Figure 11: The detected triangle, eyes’ centers and the nose
bottom, together with the gaze line.
user-specific calibration data, which will increase the
accuracy even more.
REFERENCES
A.Perez, M.L. Cordoba, A. Garcia, R. Mendez, M.L.
Munoz, J.L. Pedraza and F. Sanchez (2003) A pre-
cise eye-gaze detection and tracking system. In 11th
International Conference in Central Europe on Com-
puter Graphics, Visualization and Computer Vision.
Farkas, L. (1994). Anthropometry of the Head and Face.
Raven Press.
Faugeras, O. and Luong, Q. (2001). The Geometry of Mul-
tiple Images. MIT Press.
Gee, A. and Cipolla, R. (1994a). Estimating gaze from a
single view of a face. In IAPR 12th International Con-
ference on Pattern Recognition.
Gee, A. and Cipolla, R. (1994b). Non-intrusive gaze track-
ing for human-computer interaction. In International
Conference on Mechatronics and Machine Vision in
Practice.
Glenstrup, A. and Engell-Nielsen, T. (1995). Eye Con-
trolled Media: Present and Future State. University
of Copenhagen, DK-2100.
Hartley, R. and Zisserman, A. (2000). Multiple-view Geom-
etry. Cambrigde University Press.
J.G. Wang, E. S. and Venkateswarku, R. (2003). Eye gaze
estimation from a single image of one eye. In 9th
IEEE International Conference on Computer Vision.
Ji, Q. and Yang, X. (2002). Real-time eye, gaze, and face
pose tracking for monitoring driver vigilance. In Real-
Time Imaging, 8, 357-377.
Sturmfels, B. (2002). Solving Systems of Polynomial Equa-
tions. American Mathematical Society.
T. Horprasert, Y. Y. and Davis, L. (May 1997). An anthro-
pometric shape model for estimating head orientation.
In 3rd International Workshop on Visual Form, Capri,
Italy.
T. Ohno, N. M. and Yoshikawa, A. (2002). Freegaze: A
gaze tracking system for everyday gaze interaction. In
Symposium on Eye Tracking Research and Applica-
tions.
VISAPP 2006 - IMAGE UNDERSTANDING
92
