
SCENE CATEGORIZATION
USING LOW-LEVEL VISUAL FEATURES
Ioannis Pratikakis, Basilios Gatos and Stelios C.A. Thomopoulos
Institute of Informatics and Telecommunications, National Centre for Scientific Research “Demokritos”, PO. Box 60228,
15310 Aghia Paraskevi, Athens, GREECE
Keywords: Image categorization, visual features, Support Vector Machines (SVM) classifier.
Abstract: In this paper, we have built two binary classifiers for indoor/outdoor and city/landscape categories,
respectively. The proposed classifiers consist of robust visual feature extraction that feeds a support vector
classification. In the case of indoor/outdoor classification, we combine color and texture information using
the first three moments of RGB color space components and the low order statistics of the energy wavelet
coefficients from a two-level wavelet pyramid. In the case of city/landscape classification, we combine the
first three moments of L*a*b color space components and structural information (line segment orientation).
Experimental results show that a high classification accuracy is achieved.
1 INTRODUCTION
The growing proliferation of digital images due to
advances in computer technologies and the advent of
World Wide Web (WWW) makes imperative the
need for robust methods for automatically analyzing,
cataloguing, and searching for digital imagery. The
major bottleneck for the automatic image
categorization has been the gap between low level
features and high level semantic concepts.
Therefore, the obvious effort toward improving
automatic semantics annotation is to focus on
methodologies that will enable a reduction or even,
in the best case, bridging of the aforementioned gap.
In this work, we present a methodology that is
directed towards reducing the semantic gap by
permitting scene categorization using visual
features.
In the literature, several authors have conducted
research for the categorization of either
indoor/outdoor or city/landscape images. The use of
a Bayesian network for integrating knowledge from
low-level and mid-level features for indoor/outdoor
image classification, is proposed in (Luo, J., and
Savakis, A., 2001). In (Stauder et al., 2004), there is
an attempt to classify images into indoor/outdoor
and city/landscape using a set of visual descriptors.
In the case of indoor/outdoor classification they use
the global color histogram in RGB color space along
with a texture descriptor using a 16-tap QMF filter.
In the case of city/landscape classification they use a
contour descriptor that is a histogram of contour
directions. In both cases, they use an SVM classifier.
In (Szummer, M., and Picard, R., 1998), they
combined features as histograms in Ohta color
space, multiresolution, simultaneous autoregressive
model parameters and coefficients of a shift
invariant DCT, to classify indoor/outdoor images
using a K-NN classifier.
In this paper, we have built two binary classifiers for
indoor/outdoor and city/landscape categories,
respectively. The proposed approach consists of
robust fused visual feature extraction that feeds a
support vector classification. In the case of
indoor/outdoor classification, we combine color and
texture information using the first three moments of
RGB color space components and the low order
statistics of the wavelet coefficients energy from the
produced wavelet pyramid. In the case of
city/landscape classification, we combine color and
structural information using the first three moments
of L*a*b color space components and the line
segment orientation histogram. Our novelty is based
upon building low dimensional combined visual
features that achieve among the highest
classification accuracies compared to the current
state-of-the-art for the classification of indoor vs.
outdoor images and city vs. landscape images.
Experimental results show the performance of the
proposed approach. This paper is organized as
follows: Section 2 details the proposed visual feature
extraction. Section 3 discusses the classification
aspects. Section 4 is dedicated to the experimental
155
Pratikakis I., Gatos B. and C.A. Thomopoulos S. (2006).
SCENE CATEGORIZATION USING LOW-LEVEL VISUAL FEATURES.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 155-160
DOI: 10.5220/0001374901550160
Copyright
c
SciTePress

results that demonstrate the performance of the
proposed methodology and finally in Section 5
conclusions are drawn.
2 FEATURE EXTRACTION
2.1 Indoor / Outdoor visual feature
extraction
In the case of indoor/outdoor classification, robust
features are extracted using a combination of color
and texture visual information.
Color is an important cue for image categorization.
Using a particular color space, the corresponding
feature can carry all its specific characteristics. For
this reason, we have used three different color
spaces. Apart from RGB color space, we made
experiments with L*a*b* and LST color space. The
L*a*b color space is approximately perceptually
uniform; thus, distances in this space are meaningful
(Wyszecki, G. and Stiles, W., 1982). The LST color
space is introduced in (Serrano et al., 2004) and is
defined by:
(),
3
(),
2
(2 )
6
k
L
RGB
k
SRB
k
TRGB
=++
=−
=−+
(1)
where L is the luminance channel, S and T are the
chrominance channels and k = 255/max{R,G,B}.
The S,T chrominance components support light
source intensity invariance. This is an important
point since the spectral characteristics of the
particular categories we are dealing with (indoor,
outdoor, and city, landscape, as well) can vary
considerably.
Let x
ij
denotes the pixel value. Each image pixel has
a three dimensional color vector
123
()[, , ]
j
jj j
Cx C C C= in the selected color space. We
compute the three first color moments that are
denoted as follows:
First moment (mean) :
1
1
N
iij
j
Ex
N
=
=
∑
(2)
Second central moment (variance) :
21/2
1
1
(( ))
N
iiji
j
xE
N
σ
=
=−
∑
(3)
Third central moment (skewness) :
31/3
1
1
(( ))
N
iiji
j
sxE
N
=
=−
∑
(4)
where
{, ,}iRGB
∈
or {,*,*}iLab
∈
or {,,}iLST∈ ,
x
ij
denotes the pixel value and N denotes the image
size.
Considering the above analysis, the color feature
vector consists of 9 coefficients.
Figure 1: A two-level wavelet pyramid structure of
the “indoor” image at Fig. 4a.
Apart from the color, visual information that
corresponds to texture is used. For this purpose, we
apply the wavelet transform using the Daubechies 7-
9 biorthogonal filters (Daubechies, I., 1988) to the
Luminance component of the color image. An
example of the produced two-level wavelet pyramid
structure is shown at Figure 1. Although, Haar is the
simplest wavelet function (small spatial support) that
consequently affects the execution time, we have not
opted for it since there exist localisation drawbacks
due to its non-overlapping wavelets at a given scale
(Sebe, N., and Lew, M.S., 2003). In multiresolution
wavelet analysis, we have the creation of sub-bands
due to the application of the combination of the low-
pass and the high-pass counterpart of the above
mentioned filters. The final number of sub-bands is
related to the number of resolution levels that an
image is considered for analysis. In the proposed
approach, the texture feature vector is made of the
mean and the variance of the energy to each
produced sub-band. The motivation for using these
features is their reflection of texture properties that
VISAPP 2006 - IMAGE UNDERSTANDING
156

has proven effective for discerning texture (Unser,
M., 1995). The texture feature vector consists of 14
coefficients (7 for the mean and 7 for the variance)
which are produced due to seven sub-bands that are
created for two (2) resolution levels. In total, the
feature vector used for indoor/outdoor classification
consists of 23 coefficients.
2.2 City/Landscape visual feature
extraction
In the case of city/landscape classification, robust
features are extracted using a combination of color
and structural information expressed by the line
segment orientation.
The color is considered in the same manner as in the
case of indoor/outdoor feature extraction. We obtain
a vector of 9 coefficients that have been computed
using the Equations 2-4. Together with color, we use
a line segment descriptor. The underlying idea is to
distinguish between long horizontal and vertical
contours that dominate in city images and short
length contours having other directions than either
horizontal or vertical that can be found in landscape
images. A similar contour descriptor has been
proposed in (Stauder et al., 2004) leading to the
extraction of a 12-bin histogram while in (Vailaya et
al., 2001) the edge direction distribution has been
proposed for the discrimination between city and
non-city images.
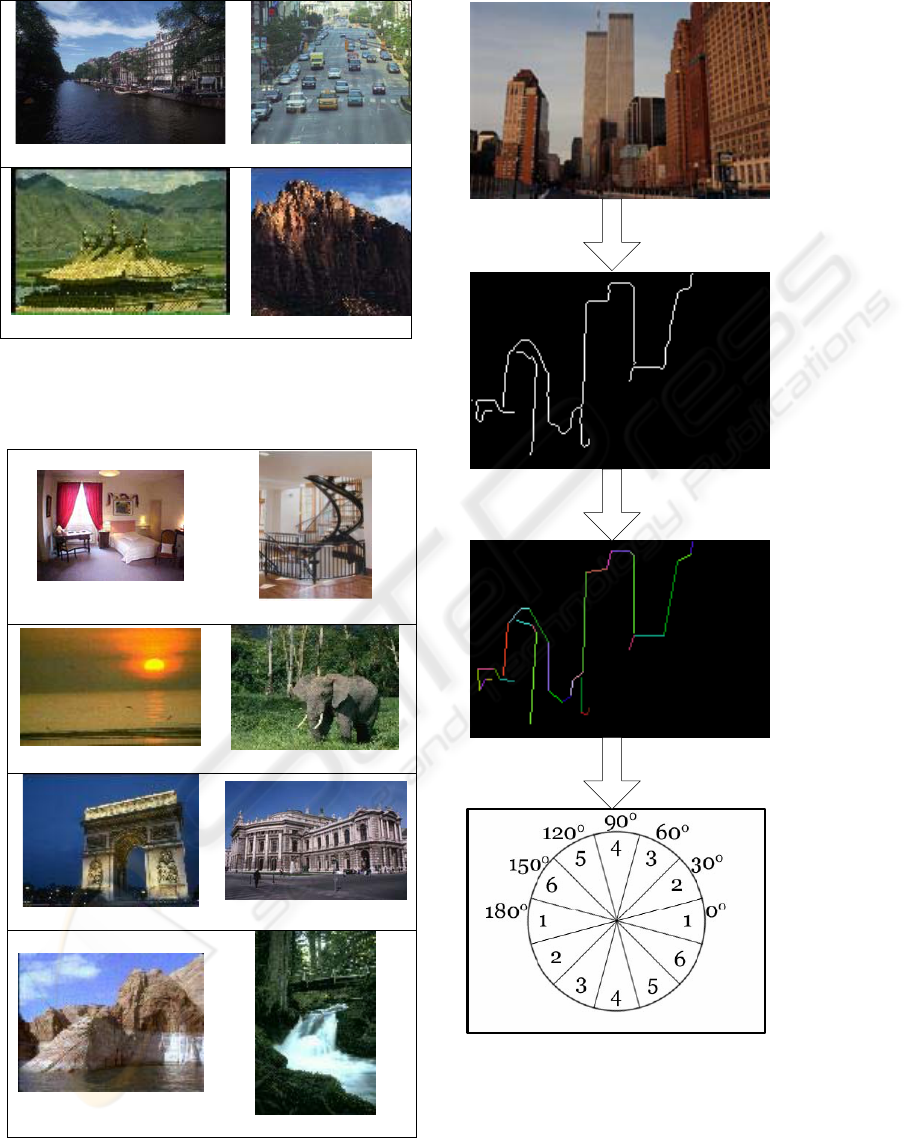
To construct the line segment descriptor which is a
histogram of line segment directions, we follow the
next steps. First, we apply an edge detection using
the Canny edge detector (Canny, J., 1986). The
produced edges are thinned and thereafter we try to
transform the edge representation into a line segment
representation. For this, we apply a non-parametric
curve segmentation into straight lines as it is
explained in (Rosin, P.,L., and West, G.A.W., 1995).
The direction of each straight line is calculated and
categorized as being either horizontal, vertical or
diagonal. Furthermore, the line segment length is
taken into account in order to be labelled as either
short or long segment. A segment will be considered
as a long one if it is greater than 10% of the
minimum dimension (either width or height).
Finally, a histogram with six (6) bins is computed. A
schematic representation of the different required
steps is shown at Figure 5. In total, the feature vector
used for city/landscape classification consists of 15
coefficients.
3 CLASSIFICATION - FEATURE
FUSION
In the particular binary classification problem
(indoor vs. outdoor and city vs. landscape) the
classification step was performed using two well-
known classification algorithms, K-NN
(Theodoridis, S., and Koutroumbas, K., 1997) and
Support Vector Machines (SVM) (Cortes C., and
Vapnik, V., 1995)( Vapnik, V., 1998)( Chang, C.C.,
and Lin, C.-J.).
Formally, the support vector machines (SVM)
require the solution of an optimisation problem,
given a training set of instance-label pairs (x
i
, y
i
),
i=1,…,m, where
n
i
x
R∈ and {1, 1}
m
i
y ∈− . The
optimisation problem is defined as follows :
,,
1
1
min
2
(())1
0
m
T
i
b
i
T
ii i
i
C
subject to y x b
ωξ
ωω ξ
ω
φξ
ξ
=
+
+
≥−
≥
∑
(5)
According to this, training vectors x
i
are mapped into
a higher dimensional space by the function
φ
. Then,
SVM finds a linear separating hyperplane with the
maximal margin in this higher dimensional space.
For this search, there are a few parameters that play
a critical role at the classification performance.
Firstly, the parameter C at Eq. 5, that applies a
penalty at the error term. Secondly, the so-called
kernel function denoted as :
(, ) () ()
T
ij i j
K
xx x x
φφ
≡
.
One of the main aspects in classification is the
interaction between the features and the available
classifiers. Mainly, there are two trends in this
interaction. Either different features are combined
into a final feature vector as the input to the
classifier (Lim, H-H., and Jin, J.S., 2005), (Stauder
et al., 2004), or feature vectors associated with
different modalities are fed into independent pattern
classifiers whose classification outputs are then
combined (Serrano et al., 2004), (Szummer, M., and
Picard, R., 1998), (Payne, A., and Singh, S., 2005).
These basic trends have shown both advantages and
disadvantages. A disadvantage of the latter trend is
that the training of multiple classifiers on individual
features may not be viable at all, as single feature
does not provide sufficient discriminative power,
resulting in many poor classifiers for fusion.
In our approach, we follow the former trend, where
the classifier’s input feature vector consists of a
concatenation of each feature that is considered for
the corresponding classification problem (indoor vs.
outdoor, or city vs. landscape). A detailed discussion
about these features has already been given at
Section 2.
SCENE CATEGORIZATION USING LOW-LEVEL VISUAL FEATURES
157

4 EXPERIMENTAL RESULTS
For our experiments, we have considered a generic
database of about 1600 color images that have been
collected from various sources like the web, the
MPEG-7 VCE-2 dataset (MPEG-7), the Corel photo
galleries (Corel) and the Microsoft Research
Cambridge Object Recognition Image Database 1.0
(MRC). All images have a 24-bit color resolution
and there exist a great variety in their size. We have
split the available database in training dataset and
testing dataset. The exact distribution in size of those
datasets can be seen at Table 1.
Regarding the classification step, K-NN was used
with (k=5). On the other hand, SVM was used in
conjunction with the Radial Basis Function (RBF)
kernel, a popular, general-purpose yet powerful
kernel, denoted as:
2
( , ) exp( )
ij i j
Kx x x x
γ
≡−− (6)
Furthermore, a grid search was performed in order to
find the optimal values for both the variance
parameter (γ) of the RBF kernel and the cost
parameter (C) of SVM (see Eq. 5).
Quantification of our experiments is shown at Table
2. First, we can observe that support vector
classification (SVM) outperforms K-NN
classification for both indoor/outdoor and
city/landscape classification problems. Second, the
proposed visual features combined with a support
vector classification (SVM) produces high
classification accuracy that is, 95% for
indoor/outdoor and 89.97% for city/landscape
images. The achieved performance is among the
highest in the state-of-the-art. To test the influence
of the color space, we have carried out experiments
with different color spaces. Specifically, we have
used RGB, LST and L*a*b color space. We found
out that the combined feature set performs better in
the case of RGB color space for indoor/outdoor
classification, while the L*a*b color space supports
a superior performance for city/landscape
classification. The detailed comparison in terms of
produced classification accuracy can be seen at
Table 2.
Furthermore, for the sake of clarity, we do not only
present examples of correctly classified images in
Figure 4, but also examples of misclassified images
are shown in Figures 2, 3. Even after a brief
examination of these examples we may easily
understand the difficulty to avoid misclassification.
For example, in indoor images that have been
classified as outdoor there is much green color that
may correspond to outdoor as well as vivid colors
that is not the case of indoor images. Also, in city
images like the city of Amsterdam that we get a
picture which includes a river and trees, these
characteristics are the dominant characteristics of
landscape images, advocating the involved
misclassification. In these cases a contextual
knowledge is imperative to be considered for having
a correct classification.
5 CONCLUSIONS
In this work, we have presented two binary
classifiers for indoor/outdoor and city/landscape
categories. The basic component of the proposed
scheme for robust feature extraction is expressed as:
(i) in the case of indoor/outdoor classification, a
combination of color and texture information using
the first three moments of RGB color space
components and the low order statistics of the
wavelet coefficients energy from the produced
wavelet pyramid; (ii) in the case of city/landscape
classification, a combination of color and structural
information using the first three moments of L*a*b
color space component along with the line segment
orientation histogram. The proposed features along
with a support vector classification produce high
classification accuracy.
We aim to apply the proposed methodology on
larger datasets. We opt on working towards methods
that do not calculate global image features. In this
case, meaningful regions could be identified that
correspond to objects in an image and consequently
feature computation can be applied over the
corresponding regions.
REFERENCES
Canny, J., 1986. A Computational Approach to Edge
Detection, IEEE Transactions on Pattern Analysis and
Machine Intelligence, Vol. PAMI-8, No. 6, pp. 679-
698.
Chang, C.C., and Lin, C.-J., LIBSVM: a library for
support vector machines, Software available at
http://www.csie.ntu.edu.tw/~cjlin/libsvm.
Corel Corp. http://www.corel.com
Cortes C., and Vapnik, V., 1995. Support-vector network,
Machine Learning, vol. 20, pp. 273-297.
Daubechies, I., 1988. Orthonormal bases of compactly
supported wavelets, Communications on Pure and
Applied Mathematics, vol. XLI, no. 41, pp. 909-996.
VISAPP 2006 - IMAGE UNDERSTANDING
158
Microsoft Research Cambridge (MRC) Object
Recognition Image Database 1.0,
http://research.microsoft.com/research/downloads/
MPEG-7 VCE-2 Dataset, http://mpeg.nist.gov
Lim, J-H., and Jin, J.S., 2005. Combining intra-image and
inter-class semantics for consumer image retrieval,
Pattern Recognition, vol. 38, pp. 847-864.
Luo, J., and Savakis, A., 2001. Indoor vs. Outdoor
classification of consumer photographs using low-level
and semantic features, In Proceedings of International
Conference of Image Processing (ICIP), vol. II, pp.
745-748.
Payne, A., and Singh, S., 2005, Indoor vs. outdoor scene
classification in digital photographs, Pattern
Recognition, vol. 38, pp. 1533-1545.
Rosin, P.,L., and West, G.A.W., 1995. Nonparametric
segmentation of curves into various representations,
IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 17, No. 12, pp. 1140-1153.
Sebe, N., and Lew, M.S., 2003, Comparing salient point
detectors, Pattern Recognition Letters, vol. 24, pp. 89-
96.
Stauder, J., Sirot, J., Le Borgne, H., Cooke E., and
O’Connor, N.E., 2004. Relating visual and semantic
image descriptors, In Proc. of European Workshop on
the Integration of Knowledge, Semantics and Digital
Media Technology,pp. 221-228, London, UK,
November 25-26.
Serrano, N., Savakis, A., and Luo, J., 2004. Improved
scene classification using efficient low-level features
and semantic cues, Pattern Recognition, vol. 37, pp.
1773-1784.
Szummer, M., and Picard, R., 1998. Indoor-outdoor image
classification, In Proc. of Int. Workshop on Content-
based access of image and video databases, pp. 42-51.
Theodoridis, S., and Koutroumbas, K., 1997. Pattern
Recognition, Academic Press.
Unser, M., 1995. Texture Classification and Segmentation
Using Wavelet Frames, IEEE Trans. Image
Processing, vol. 4, no. 11, pp. 1549-1560.
Vailaya, A., Figueiredo, M.A.T., Jain, A.K, and Zhang, H-
J., 2001, Image classification for content-based
indexing, IEEE Transactions on Image Processing,
vol. 10, No. 1, pp. 117-130.
Vapnik, V., 1998. Statistical Learning Theory, Wiley,
New York.
Wyszecki, G. and Stiles, W., 1982. Color Science:
Concepts and Methods, Quantitative Data and
Formulae, second ed. Wiley.
Table 1: Training / Testing Dataset size
Database Training
Dataset size
Testing
Dataset size
Indoor 170 173
Outdoor 210 210
City 209 209
Landscape 210 208
Table 2: Classification accuracy (%)
COLOR
SPACE
CLASSIFIERS CATEGORIES
Indoor /
Outdoor
City /
Landscape
K-NN 91,98 81,18
RGB
SVM
95
(C=170,
γ=0.4)
86,19
(C=180,
γ=0.007)
K-NN 87,92 84,25
LST
SVM
94,73
(C=170,
γ=0.007)
84,65
(C=180,
γ=0.008)
K-NN 90,16 78,99
L*a*b
SVM
94,21
(C=170,
γ=0.4)
89,97
(C=180,
γ=0.005)
(a)
(b)
Figure 2: Examples of misclassified images : (a)
Indoor images classified as outdoor; (b) Outdoor
images classified as indoor.
SCENE CATEGORIZATION USING LOW-LEVEL VISUAL FEATURES
159
(a)
(b)
Figure 3: Examples of misclassified images : (a)
City images classified as Landscape; (b) Landscape
images classified as City.
(a)
(b)
(c)
(d)
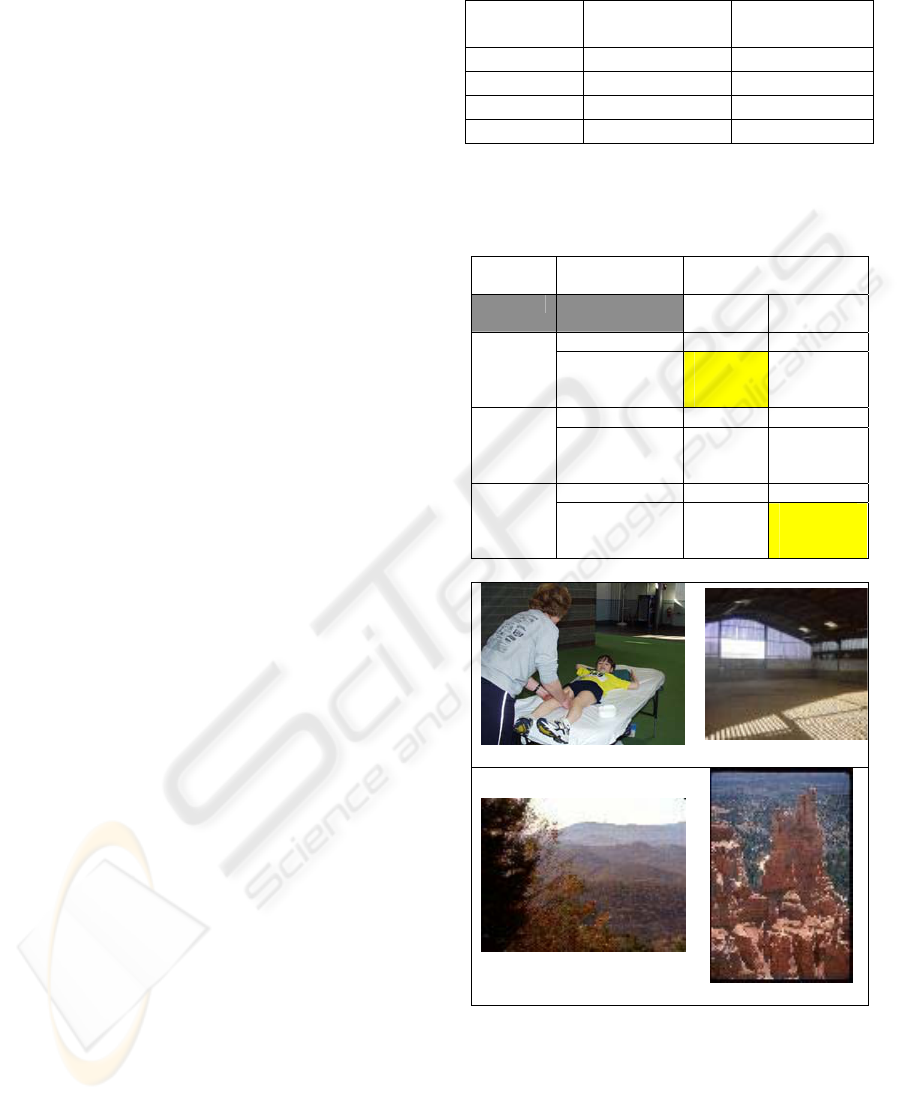
Figure 4: Examples of correctly classified images :
(a) Indoor images; (b) Outdoor images; (c) City
images; (d) Landscape images.
Figure 5: Visual block representation of the required
steps for the computation of the proposed contour
descriptor.
Correspondence
between
Orientation and
Histogram bins
Original
image
Edge
detection
Line segment
detection
VISAPP 2006 - IMAGE UNDERSTANDING
160
