
ACHIEVING HIGH-RESOLUTION VIDEO
USING SCALABLE CAPTURE, PROCESSING, AND DISPLAY
Donald Tanguay
HP Labs, Palo Alto, CA & Stanford University, Stanford, CA, USA
H. Harlyn Baker, Dan Gelb
Hewlett-Packard Laboratories, 1501 Page Mill Rd, Palo Alto, CA, USA
Keywords: Camera arrays, Chip multiprocessors, GPUs, Mosaicking, Video processing.
Abstract: New video applications are becoming possible with the advent of several enabling technologies:
multicamera capture, increased PC bus bandwidth, multicore processors, and advanced graphics cards. We
present a commercially-available multicamera system and a software architecture that, coupled with
industry trends, create a situation in which video capture, processing, and display are all increasingly
scalable in the number of video streams. Leveraging this end-to-end scalability, we introduce a novel
method of generating high-resolution, panoramic video. While traditional point-based mosaicking requires
significant image overlap, we gain significant advantage by calibrating using shared observations of lines to
constrain the placement of images. Two non-overlapping cameras do not share any scene points; however,
seeing different parts of the same line does constrain their spatial alignment. Using lines allows us to reduce
overlap in the source images, thereby maximizing final mosaic resolution. We show results of synthesizing
a 6 megapixel video camera from 18 smaller cameras, all on a single PC and at 30 Hz.
1 INTRODUCTION
Several industry trends are creating new
opportunities for video processing on commodity
PCs. First, PC bus bandwidth is increasing from 2
Gbit/sec to 40 Gbit/sec, with 80 Gbit/sec planned.
Second, graphics cards have become very powerful
general-purpose computing platforms that also
support high-bandwidth display. Finally, processor
manufacturers have begun delivering chip
multiprocessors for parallel execution. In particular,
they can no longer exclusively rely on smaller
transistors and higher clock speeds to improve
performance. Due to the economics of their current
strategy, manufacturers have turned their attention to
multiple-core processors (Gibbs, 2004). For
example, Sun’s Niagara processor has 32 processing
cores (Kongetira, 2005).
Along with these opportunities for video
computing come two significant challenges. The
first challenge is the difficulty of obtaining good
quality video. This is due to a market focus on both
low quality webcams and expensive, non-scalable
machine vision systems. To address this problem we
have designed a capture system that uses the PCI-x
bus to stream many video cameras directly into the
memory of a single PC. Figure 1 shows an example
arrangement of many cameras for video mosaicking.
A second significant challenge is that successful
multiprocessing requires multithreaded program-
ming. This is difficult and error prone. In fact, a
Figure 1: A mosaic camera is one type of new video
application enabled by current imaging and
computing trends.
162
Tanguay D., Harlyn Baker H. and Gelb D. (2006).
ACHIEVING HIGH-RESOLUTION VIDEO USING SCALABLE CAPTURE, PROCESSING, AND DISPLAY.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 162-169
DOI: 10.5220/0001374301620169
Copyright
c
SciTePress

startling result of the multicore trend is that most
existing applications will no longer benefit from
future processor advances (Gibbs, 2004) unless they
are redesigned (McDougall, 2005). While most
applications have multiple threads, the vast majority
are not performing compute-intensive operations in
parallel. While video applications have large
computing needs, they can often benefit from
multiprocessing. To address this computing
challenge, we have developed a cross-platform
software framework specifically designed to perform
video processing on a multiprocessor.
Such scalable capture and processing systems
enable new video applications. For our first effort,
we have chosen to develop a high-resolution video
camera from many smaller ones (Figure 1). A trend
in digital photography is that still cameras can now
have upwards of 12 megapixels of resolution, with 5
megapixel cameras being common. Video cameras,
however, haven’t attained these resolutions.
Expensive HDTV cameras have the most resolution,
at about 2 megapixels. Our goal is to significantly
exceed current video resolutions.
A range of applications could benefit from such a
high-resolution video camera. For example,
surveillance systems need enough resolution over a
large area to identify suspects. As another example,
an interactive desk-space may need to image an
entire tabletop at high resolution in order to digitize
documents placed anywhere on the desk.
2 RELATED WORK
Other systems of high-bandwidth video capture
(Kanade 1995, Wilburn 2002) have been developed.
Thus far, however, these systems work offline or use
lossy compression to satisfy bandwidth constraints.
Besides mosaicking, other novel applications of
multicamera video being pursued are synthesizing a
camera with a very high frame rate (Wilburn, 2004)
and making one with an enormous synthetic aperture
for selective depth of field (Levoy, 2004).
Most mosaicking methods use point
correspondences to constrain image alignment. In
digital photography, panoramic mosaics (Peleg
1997, Sawhney 1998, Shum 2000) are derived from
the motion of a single hand-held camera. In
photogrammetry, aircraft and satellites capture
images which are stitched together to produce
photographic maps. Having large areas of overlap
(typically 20-50%), these solutions are generally not
effective for a rigid camera arrangement because this
overlap reduces total resolution. They also typically
depend on a scene’s visual complexity since they
require distinguishable features from the content
itself. Because our cameras do not move relative to
each other, we can calibrate the system beforehand.
Our video processing framework is inspired by
early dynamic dataflow computers (Arvind, 1984)
which potentially exploit the full parallelism
available in a program. In such a computer, each
processing node is enabled when tokens with
identical tags are present at each of its inputs. Thus,
process scheduling is completely determined by the
availability of data. Our software framework
emulates this behaviour on a multiprocessor. While
a dataflow computer can achieve fine-grained
parallelism at the instruction level, our framework
operates at a much coarser granularity such as a
single video frame.
Signal processing software environments (such
as Ptolemy (Buck, 1994) and Khoros (Rasure, 1991)
have an established history of “visual dataflow
programming.” Others have presented a thorough
review of such systems and their relationship to
other dataflow styles (Lee, 1995). The one-
dimensional, fine-grained, deterministic nature of
audio processing often allows optimal scheduling at
compilation time. In video and vision processing,
however, the mapping of inputs to outputs is often
nondeterministic (e.g., face detection vs. 1-D
convolution), and the sample size is larger (e.g., 30
Hz video vs. 44 KHz audio).
Some commercial frameworks are available for
multimedia processing, including DirectShow
(Microsoft) and the Java Media Framework (Sun).
DirectShow is designed for plug-and-play
compatibility between third-party developers. For
example, a commercial video conferencing
application can transparently use any particular
video camera if both manufacturers adhere to a
common DirectShow interface. Unfortunately,
constructing new modules is painfully difficult, and
it is a Windows-only system. By encapsulating a
simple DirectShow application inside a software
module, we leverage DirectShow for its real strength
– to access third party devices. The Java Media
Framework has cross-platform support, as well as
integrated networking support via RTP; however, its
video processing performance is not competitive.
Distributed computing extends the dataflow
approach from a single machine to a network of
machines. The Berkeley Continuous Media Toolkit
ACHIEVING HIGH-RESOLUTION VIDEO USING SCALABLE CAPTURE, PROCESSING, AND DISPLAY
163

(Mayer-Patel, 1997) is multi-platform and uses
Tcl/TK. The open-source Network-Integrated
Multimedia Middleware project (Lohse, 2002) has
demonstrated applications with set-top boxes and
wireless handhelds. Unlike our framework, these
approaches do not have single-machine performance
features, such as a dataflow scheduler. However, we
believe a distributed computing approach can be
very complementary to our framework.
Finally, the power of graphics cards is being
used in many other applications. For example, GPUs
are being used to perform a real-time plane-sweep
stereo computation (Yang, 2004). Furthermore, the
GPGPU organization (GPGPU) promotes general
purpose computing on graphics cards.
3 MOSAIC CAMERA
A mosaic camera is a composite of many other
cameras. Calibration is the process of determining
the parameters that map these cameras into a
seamless image. We describe the calibration
problem, formulate the solution as a global
minimization, and describe how to calibrate in
practice.
3.1 Problem Statement
The goal of our video application is to produce high
resolution video from many cameras. We have
narrowed our focus with two requirements. First, to
produce resolution that scales with the number of
cameras, we fully utilize native resolution by
“tiling” the cameras. In other words, we require that
camera images overlap only to ensure spatial
continuity in the final mosaic. Super-resolution
techniques, on the other hand, require complete
overlap and face theoretical limits on resolution
(Robinson, 2003).
Second, we facilitate an initial solution by using
a linear homographic model for mapping each
camera into a common imaging plane to produce the
final mosaic. This homographic model supports two
types of scenario: those where the imagers have a
common centre of projection (i.e., pure camera
rotation), and those where the scene is basically
planar (e.g., imaging a white board). For the latter
scenario, we can increase the range of valid depths
by increasing the distance from the cameras to the
scene, or by reducing the separation between camera
centres. In fact, continued reduction in camera sizes
improves the validity of the homographic model.
Our calibration methodology is as follows: (1)
Place cameras in an arrangement so that they cover
the desired field of view, while minimizing overlap.
(2) Select one camera
0
C as the reference camera
(typically, a central one), with its image plane
becoming the imaging plane of the final mosaic. (3)
Estimate a homographic mapping
H
0
i
for each
camera
i
C that maps its image into camera
0
C to
produce a single, coherent mosaic image.
3.2 Line-Based Solution
We calibrate the cameras using line
correspondences. Using lines has two major
benefits. First, a line can be estimated more
accurately than a point. It can be localized across the
gradient to subpixel accuracy (Canny, 1986), and the
large spatial extent allows estimation from many
observations along the line. Second, two cameras
can observe the same line even without any
overlapping imagery. This profoundly increases the
number of constraints on a solution because non-
neighbouring cameras can have common
observations.
We have developed a bundle adjustment
formulation to minimize the geometric error in the
mosaic image by simultaneously estimating both the
homographies of each camera and the line models
behind the observations. The nonlinear least-squares
formulation is
()
2
,
0,
ˆ
,
ˆ
~
,
ˆ
minarg
00
∑
≠
ji
j
i
j
i
i
d
ji
ll
lH
, (1)
Figure 2: Imaging geometry of the 3x6 mosaic
camera. The 18 side-by-side imagers (top) are
aligned using common observations of lines on a
plane (shown in blue). The individual camera fields
of view (outlined in red) illustrate minimal image
overlap.
VISAPP 2006 - IMAGE FORMATION AND PROCESSING
164

where the estimated parameters are the ideal point
homographies
H
ˆ
0
i
from the cameras
i
C to the
reference camera
0
C and the ideal lines
j
l
ˆ
0
,
expressed in the coordinates of the reference camera.
The function
()d
measures the difference between
j
i
l
~
, the observation of line
j
l
in camera
i
C , and
its corresponding estimate
j
i
l
ˆ
. This measure can be
any distance metric between two lines. We chose the
perpendicular distance between the ideal line and the
two endpoints of the measured line segments. This is
a meaningful error metric in the mosaic space, and it
is computationally simple. More specifically, we
have selected
()d
so that the bundle adjustment
formulation of Equation 1 becomes
()()
2
00
2
,
00
0,
ˆ
,
ˆ
ˆˆˆˆ
minarg
00
j
i
i
T
j
ji
j
i
i
T
j
i
ji
qHlpHl
lH
⋅⋅+⋅⋅
∑
≠
(2)
where
j
i
p
and
j
i
q are the intersection points of
the measured line with the boundary of the original
source image.
The domain of the error function (Equation 2)
has
LND
c
3)1(9 +−= dimensions, where
c
N is
the number of cameras and
L is the number of
lines. Our current setup has 18 cameras and 250
lines, or 903 parameters. We use Levenberg-
Marquardt minimization to find a solution to
Equation 2, and we use a novel linear method to
initialize the parameters (Authors).
3.3 Calibration Method
We use a digital projector as a calibration
instrument. The projector displays a series of lines
one-by-one. Cameras that see a line at the same
instant
j
are actually viewing different parts of the
same line
j
l and therefore have a shared
observation. Image analysis determines line
equations
j
i
l
~
, and this is intersected with the image
boundary to find the points
j
i
p
and
j
i
q
. After all
observations are collected, the solution of Equation
2 is found, paying careful attention to parameter
normalization.
Image analysis easily dominates the calibration
time. A simple approach is to sample the space of
lines “evenly” by enumerating all pairs of points
evenly distributed around the perimeter of the
projector image. For the 3x6 mosaic camera, a
1024x768 projector, and points spaced 150 pixels
apart, calibration presents 253 calibration images
and processes 4554 total images. Reducing the
number of line images will significantly reduce
calibration time.
We have devised an alternate approach that
adapts to the number of constraints accumulated thus
far. Addressing horizontal (vertical) lines separately,
we perform a breadth-first search in a binary tree in
which each node defines an interval, and the two
children define the top and bottom (left and right) of
the parent’s interval. Starting at the root, which
contains the entire image, each visited node
represents a line drawn across (down) the middle of
the interval. The sequence becomes: one line, two
lines offset a quarter from opposite edges, etc. The
search is terminated when every camera has at least
two lines in common with another camera. This
coarse to fine method reduces the number of
calibration image to 60, so that the calibration
processes 1080 total images, a 76% reduction.
4 SCALABLE CAPTURE
The camera system (Figure 4) streams synchronized
video to PC memory through a tree structure with
three layers: camera, concentrator, and frame
grabber.
The camera package is a 30 mm cube consisting
of three small boards: a color VGA CMOS sensor, a
Figure 3: A single calibration projector image, as
seen from all 18 cameras.
Figure 4: Our capture hardware currently supports 22
Bayer-format VGA cameras at 30 Hz, without
compression.
ACHIEVING HIGH-RESOLUTION VIDEO USING SCALABLE CAPTURE, PROCESSING, AND DISPLAY
165
co-processor, and a low-voltage differential-
signalling (LVDS) chip interfacing to the rest of the
system. It is connected to a concentrator board
through a 10-wire UTP connector over an LVDS bus
that carries captured video data, control signals, and
power. An FPGA is available for truly scalable on-
camera processing (not exploited in this work).
The concentrators and frame grabber use Altera
Flex FPGAs, and the frame grabber is built on a
QuickLogic 5064 64-bit DMA engine designed for a
64-bit PCIx bus. The DMA engine delivers 24
Bayer-format VGA video streams directly into RAM
at 30 Hz, without causing any load on the CPU. Our
interface card currently operates at 33MHz on this
bus, with theoretic utilization of about 0.25GB/sec.
We plan extensions to PCI-express which will
provide 4.4 GB/sec, or 350 VGA streams at 30 Hz.
Our hardware collaborator is now commercial-
izing the system. More details are available
(Authors).
5 SCALABLE PROCESSING
Video processing performance becomes more
scalable if multiprocessing can take advantage of
inherent parallelism in an application. We have built
a cross-platform software framework (Authors) to
build multimedia applications. We now describe
how to use such an architecture to achieve
computational scalability in video applications.
5.1 Software Dataflow
A dataflow architecture naturally models the
streaming nature of real-time rich media
applications. Simply stated, a dataflow architecture
is one based on sequential transformations of data.
By observing the lifecycle of signals in the
application (from production through transformation
to consumption), one can define a pipeline of
distinct processing stages. These stages can be
expressed as a directed graph of processing modules.
The application, then, is a connected graph of
functional modules linked together by directed arcs.
This modular graph structure reveals opportunities
for parallel computing. Figure 5 shows two dataflow
graphs for the mosaic camera.
Our software framework uses the dataflow
paradigm to isolate the algorithms (e.g., video
processing or analysis) from the runtime system
(e.g., multithreading, synchronization, performance
measures). The developer concentrates on the
algorithmic processing specific to the application at
hand, while at the same time leveraging the
framework to address performance issues. More
specifically, our architecture provides a framework
for (1) decomposing an application’s processing into
task dependencies, and (2) automating the
distribution and execution of those tasks on a
multiprocessor machine to maximize performance.
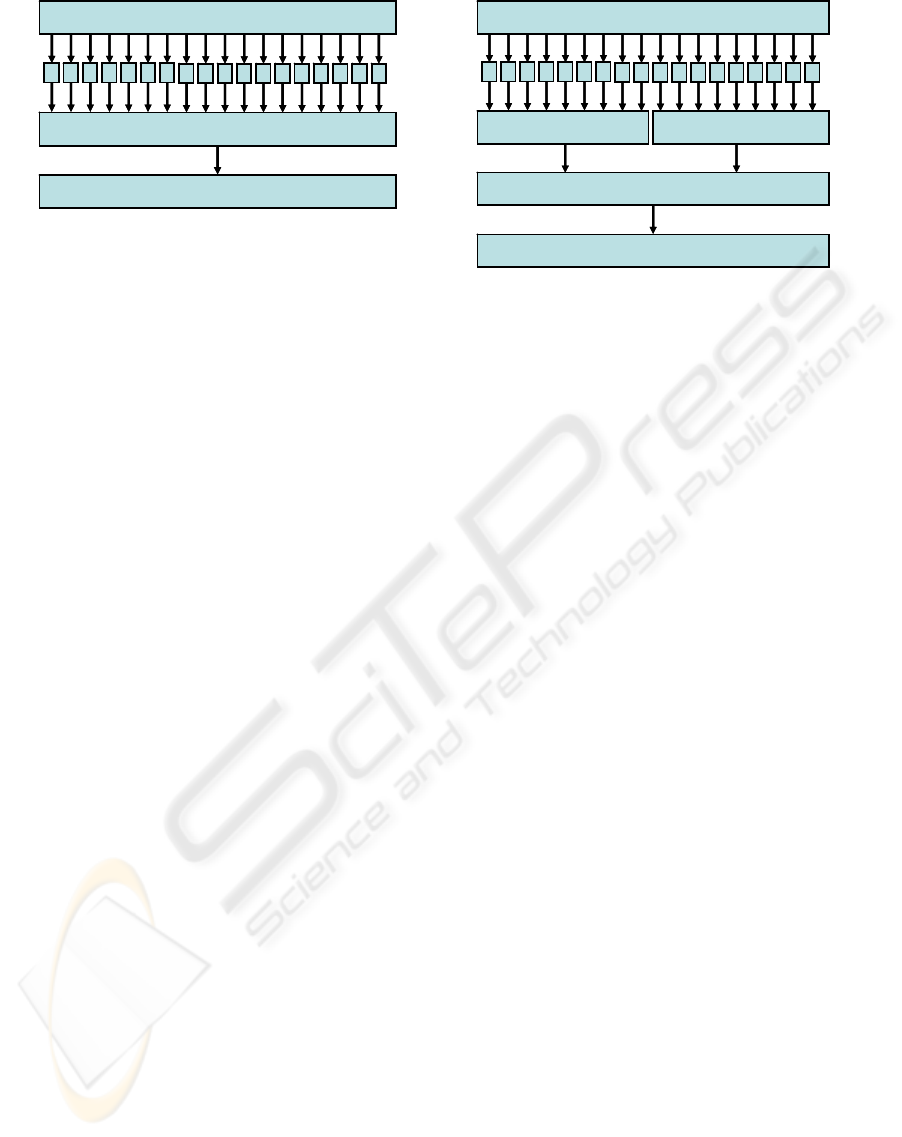
Figure 5: Leveraging chip multiprocessors with a flexible software design. The data flow structure of an application
reveals opportunities for parallel computation. The straightforward mosaic application (left) has task parallelism
across the image converters. Data parallelism can concurrently execute the monolithic mosaicking module,
possibly increasing latency. Alternatively, a developer can divide the mosaic module (right) into multiple sections
and therefore increase task parallelism.
Camera Array
Image Mosaicking
Viewer W indow
Image
Converters
Camera Array
Image Mosaicking
Viewer W indow
Image
Converters
Camera Array
½ Image Mosaicking
Viewer W indow
Image
Converters
½ Image Mosaicking
Image Merge
Camera Array
½ Image Mosaicking
Viewer W indow
Image
Converters
½ Image Mosaicking
Image Merge
VISAPP 2006 - IMAGE FORMATION AND PROCESSING
166
5.2 Parallelism
Our architecture has facilities to take advantage of
both task and data parallelism. In task parallelism,
each processing module is treated as sequential, that
is, that each input must be processed in order of
arrival. Sequential modules have internal memory,
and so the output may depend both on the current
input and previous inputs. An example sequential
module is one that tracks coordinates of a hand,
where the location in the previous frame initializes
the search for the hand location in the current frame.
At most one execution thread may be resident in a
sequential module at any given instant. A computer
with processors equal to the number of modules will
reach the limit of usable task parallelism. Each
module essentially has its own processor, and
additional processors can not improve performance.
In fact, the application throughput is limited by the
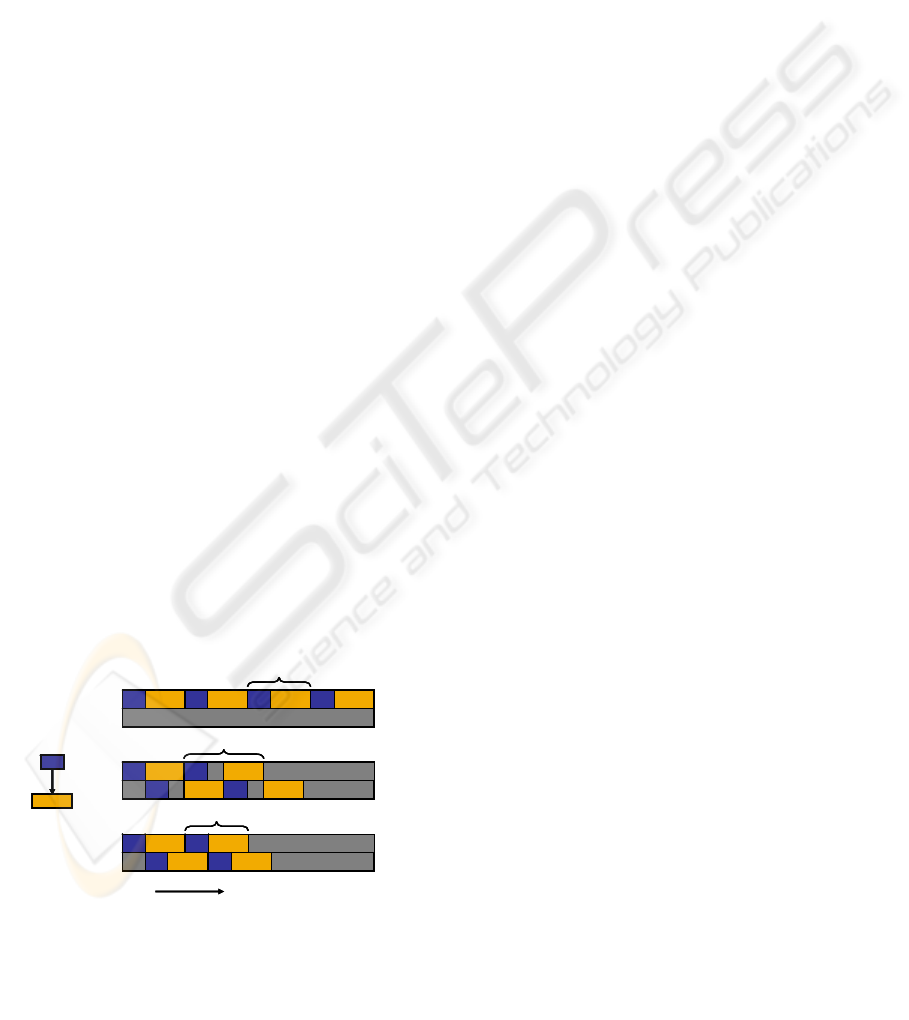
latency of the slowest module. Figure 6 (middle)
illustrates execution using task parallelism.
More significantly, our architecture can also use
data parallelism, which has the potential of
increasing performance linearly with the number of
processors. The scheduler uses data parallelism on
modules specified as combinational, or stateless. In
other words, these modules do not have any internal
history of previous executions. An example
combinational module is one that compresses
images to JPEG. Because each conversion is
independent of any other, the code of the converter
can be executed simultaneously by multiple threads
on different data. Being combinational is particularly
key for a module that is a performance bottleneck
(i.e., one that has the largest latency).
Figure 5 shows two versions of the CPU-based
mosaicking application. The straightforward
implementation (left) exhibits significant parallelism
among the converters. Because the mosaic module is
combinational, multiple instances of it can be
executed concurrently via data parallelism.
Alternatively, the large mosaic module can be
divided spatially so that two modules each work on
one half of the mosaic (Figure 5, right). A separate
lightweight module is introduced to combine the
results.
5.3 Performance Tuning
Because the application graph is a pipeline
architecture, it exhibits the usual latency/throughput
trade-offs. At the extremes, the single processor
machine will have lower latency and throughput,
and a multiprocessor with data parallelism may have
higher latency but similar or better throughput.
Constraints on particular applications determine the
appropriate latency/throughput trade-off. Our
architecture provides simple mechanisms to change
the execution behaviour to explore these
performance trade-offs.
Our framework assumes data and processing
have coarse granularity. That is, media samples
generally are at least a kilobyte in size and have a
duration of at least a millisecond. Our framework is
not designed for implementing integer addition, for
example, because the fine granularity reveals the
multiprocessing overhead (e.g., data transfer,
threading, and synchronization).
6 SCALABLE DISPLAY
Of the three key technologies enabling new video
applications, graphics cards are the most accessible.
Driven by the demands of the gaming market, a
modern graphics card has both a high-bandwidth
connection to main memory and impressive
processing capabilities.
The high-bandwidth connection to the host
CPU’s main memory is either AGP or PCI, both
delivering 5-16 Gbits/sec. This easily supports up to
hundreds of uncompressed colour VGA video
streams. Drawing video on a graphics card entails
sending it the latest frame, storing this as a texture,
and drawing the texture through the normal graphics
transformation pipeline. Amazingly, the latest
graphics processors have 200 gigaflops of
Figure 6: Parallel execution. On a dual processor
system, a program can be executed sequentially
(top), with task parallelism (middle), or with data
parallelism (bottom), changing the latency and
throughput of the application.
1 1 2 2 3 3 4 4
A
B
1 1 3 3A
B
2 2 4 4
1 1 3 3
2 2 4 4
A
B
latency
latency
latency
Time
1 1 2 2 3 3 4 4
A
B
1 1 3 3A
B
2 2 4 4
1 1 3 3
2 2 4 4
A
B
1 1 2 2 3 3 4 4
A
B
1 1 3 31 1 3 3A
B
2 2 4 42 2 4 4
1 1 3 31 1 3 3
2 2 4 42 2 4 4
A
B
latency
latency
latency
Time
ACHIEVING HIGH-RESOLUTION VIDEO USING SCALABLE CAPTURE, PROCESSING, AND DISPLAY
167

computing power. These GPUs have been heavily
optimized for frame-based computing. To leverage
the full capabilities, one must formulate a problem
as a graphics rendering (GPGPU).
Developers now have the option of processing on
either the host PC or a graphics card. In our mosaic
camera, for example, we have two ways of using the
graphics card. First, ignoring lens distortion and
other nonlinear effects, the homographic mapping
may have the same parameterization as drawing
textures onto a quadrilateral. Figure 7 shows a
reduced software pipeline using the GPU to mosaic
the images. Second, because our single-sensor
cameras deliver the original Bayer colour image, the
GPU shader can be programmed to perform the
colour sampling. Figure 7 depicts the further
reduced software pipeline, in which the CPU does
nothing at all. Note that these types of optimizations
are not always possible.
A display could also be scalable in the number of
pixels. In a similar fashion to the mosaic camera, a
tiled projector display would dramatically increase
the display resolution and allow presentation of a
mosaic video. We have begun efforts on this
problem.
7 RESULTS
We
have built an end-to-end system and now show
initial results. Figure 8 shows the mosaic results of
the cameras looking at a patterned wall. The pattern
is an arrangement of coloured lines with white
numbers as landmarks. The input images are shown
in Figure 8 (left), where they are tiled in the same
3x6 arrangement as the cameras. Figure 8 (right)
shows the final result. The solution has a maximum
error of 1.2 pixels, or 0.04% of the mosaic width of
3600.
Remarkably, the six left cameras are perfectly
aligned with the rest of the mosaic in spite of the gap
between these two sets of images. Although the two
sets of cameras do not share any 3-D scene points,
they do have enough information from observing
different parts of the same lines.
The best performance for the mosaic camera
came with the computing configuration of Figure 7
(right). We achieved 30 Hz mosaic video using an
NVIDIA FX3400 graphics card on a dual processor
machine. Multicore results are expected by press
time.
Figure 8: Results from a 3x6 mosaic camera. 18 VGA images (left) are combined into one 3600x1400 mosaic
(right). The scene is a projected image with coloured lines and numbered landmarks. Notice that all the lines
are straight in the result.
Figure 7: GPUs and CPUs. With an appropriate formulation, graphics processors can assist GPUs. For limited
situations of the mosaic camera, the graphics card can display video (left), compute the composite image (middle),
and convert image formats (right).
RA M
Camera System
Ba yer RGB
RA M
Graphics Board
AGP
Color
Conversion
Synchroni zed
Cameras
DisplayCompositing
RG B
PC I
RA M
Camera System
Ba yer RGB
RA M
Graphics Board
AGP
Color
Conversion
Synchroni zed
Cameras
DisplayCompositing
RG B
PC I
Ba yer RG B
GPU
Color
Conversion
Synchronized
Cameras
Compositing,
Display
PC I
Ba yer RG B
GPU
Color
Conversion
Synchronized
Cameras
Compositing,
Display
PC I
Bay er
GPU
Synchronized
Cameras
Color Conversion,
Compositing, Display
PC I
Bay er
GPU
Synchronized
Cameras
Color Conversion,
Compositing, Display
PC I
VISAPP 2006 - IMAGE FORMATION AND PROCESSING
168

8 CONCLUSIONS
We are entering an exciting period in which capture,
processing, and display are increasingly scalable in
the number of video streams supported. In support of
this view, we capture 24 uncompressed VGA
streams in real-time on a single PC and leverage
multiprocessors for video processing. Coupling
these developments with recent commercial
hardware advances brings forth end-to-end
scalability that enables new applications of camera
arrays and other multi-video sources. We selected a
mosaic camera as our first application in this space.
We presented several innovations in this paper.
First, we described how to use a digital projector as
a calibration instrument for a mosaic camera. We
also presented an adaptive technique for reducing
the number of calibration images using the solution
constraints accumulated thus far. We described how
the mosaic camera is built using our camera array,
and how our dataflow architecture combined with
chip multiprocessors and graphics cards present new
abilities and options for mosaic processing. Finally,
we showed initial results for 18 cameras with small
error and real-time performance.
REFERENCES
Authors. References withheld to preserve anonymity
during review process.
Arvind, D. Culler, R. Iannucci, V. Kathail, K. Pingali, R.
Thomas, 1984. The tagged token dataflow
architecture. Technical report, MIT Laboratory for
Computer Science.
Buck, J., S. Ha, E. Lee, and D. Messerschmitt, 1994.
Ptolemy: A framework for simulating and prototyping
heterogeneous systems. In International Journal of
Computer Simulation, April 1994.
Canny, J., 1986. A computational approach to edge
detection. In IEEE Trans. on Pattern Analysis and
Machine Intelligence, vol. 8, pp. 679-698.
Gibbs, W. Wayt, 2004. A split at the core. In Scientific
American, Nov. 2004.
Gortler, S.J., R. Grzeszczuk, R. Szeliski, M.F. Cohen,
1996. The Lumigraph, In Proc. ACM SIGGRAPH,
New Orleans, USA.
GPGPU. General-purpose computation using graphics
hardware. http://www.gpgpu.org.
Hartley, R., A. Zisserman, 2000. Multiple view geometry
in computer vision, Cambridge University Press.
Kanade T., P.J. Narayanan, P.W. Rander, 1995.
Virtualized reality: Concepts and early results. In
Proc. IEEE Workshop on Representation of Visual
Scenes.
Kongetira, P., K. Aingaran, K Olukotun, 2005. Niagara: A
32-way multithreaded SPARC processor. In IEEE
Micro, vol. 25, no. 2, pp. 21-29.
Lee, E., T. Parks, 1995. Dataflow Process Networks. In
Proceedings of the IEEE, May 1995.
Levoy, M., B. Chen, V. Vaish, M. Horowitz, L.
McDowall, M. Bolas, 2004. Synthetic aperture
confocal imaging. In ACM Trans on Graphics
(SIGGRAPH 2004).
Levoy, M., P. Hanrahan, 1996. Light field rendering. In
Proc. ACM SIGGRAPH, New Orleans, USA.
Lohse, M., M. Repplinger, P. Slusallek, 2002. An open
middleware architecture for network-integrated
multimedia. In Protocols and Systems for Interactive
Distributed Multimedia Systems, Proceedings of
IDMS/PROMS'2002 Joint International Workshops on
Interactive Distributed Multimedia Systems /
Protocols for Multimedia Systems, Coimbra, Portugal,
November 26-29, 2002.
Mayer-Patel, K., Rowe, L., 1997. Design and performance
of the Berkeley Continuous Media Toolkit. In
Multimedia Computing and Networking, Proc. SPIE
3020, pp. 194-206.
McDougall, R., 2005. Extreme software scaling. In ACM
Queue, vol. 3, no.7, pp. 36-46.
Microsoft Corp., DirectShow. http://msdn.microsoft.com.
Peleg, S., J. Herman, 1997. Panoramic mosaicing with
VideoBrush. In DARPA Image Understanding
Workshop, May 1997, pp.261-264.
Rasure, J., C. Williams, 1991. An integrated visual
language and software development environment. In
Journal of Visual Languages and Computing, vol. 2,
pp. 217-246.
Robinson, D., P. Milanfar, 2003. Statistical performance
and analysis of super-resolution image reconstruction.
In
Proceedings of Intl. Conf. on Image Processing.
Sawhney, H.S., S. Hsu, R. Kumar, 1998. Robust video
mosaicing through topology inference and local to
global alignment. In Proc. of the 5th European
Conference on Computer Vision, vol. II, 1998, pp.
103-119.
Shum, H.-Y., R. Szeliski, 2000. Construction of
panoramic mosaics with global and local alignment. In
International Journal of Computer Vision, February
2000, vol. 36, no.2, pp. 101-130.
Sun Corp., Java Media Framework.
http://java.sun.com/products/java-media/jmf.
Wilburn, B., N. Joshi, V. Vaish, M. Levoy, M. Horowitz,
2004. High speed video using a dense camera array. In
Proc. Computer Vision Pattern Recognition.
Wilburn, B., M. Smulski, H-H. Kelin Lee, M. Horowitz,
2002. The light field video camera. In Proc. Media
Processors, SPIE Electronic Imaging, vol. 4674, 29-
36.
Yang, R., M. Pollefeys, S. Li, 2004. Improved real-time
stereo on commodity graphics hardware. In
Proceedings of the 2004 IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition Workshops (CVPRW’04).
ACHIEVING HIGH-RESOLUTION VIDEO USING SCALABLE CAPTURE, PROCESSING, AND DISPLAY
169
