
OCCLUSION INVARIANT FACE RECOGNITION USING
TWO-DIMENSIONAL PCA
Tae Young Kim
Samsung Electronics Co. Ltd.
Suwon, Korea
Kyoung Mu Lee and Sang Uk Lee
School of Electrical Eng., ASRI, Seoul National University
151-600, Seoul Korea
Keywords:
Face recognition, occlusion invariance, 2DPCA.
Abstract:
Subspace analysis such as Principal Component Analysis(PCA) and Linear Discriminant Analysis(LDA) are
widely used feature extraction methods for face recognition. However, most of them employ holistic basis so
that local parts can not be efficiently represented in the subspace. Therefore, they cannot cope with occlusion
problem. In this paper, we propose a new method using two-dimensional principal component analysis (2D
PCA) for occlusion invariant face recognition. In contrast to PCA, 2D PCA is performed by projecting 2D
image directly onto the 2D PCA subspace, and each row of feature matrix represents the distribution of cor-
responding row of the image. Therefore by classifying each row of the feature matrix independently, we can
easily identify the locally occluded parts in the face image. The proposed occlusion invariant face recognition
system consists of two steps: occlusion detection and partial matching. To detect occluded regions, we apply a
new combined k-NN and 1-NN classifier to each row or block of the feature matrix of the test face. For partial
matching, similarity between feature matrices is evaluated after removing the rows identified as the occluded
parts. The experimental results on AR face database demonstrate that the proposed algorithm outperforms
other existing approaches.
1 INTRODUCTION
Face recognition has been one of the most challeng-
ing and active research topics in computer vision for
several decades (Zhao, 2000). The goal of face recog-
nition is to identify one or more persons, given still or
video scenes using stored faces in a database. Face
recognition system should recognize a face robustly
and independently as possible to the image variations
such as pose, illumination changes, expression, and
occlusion.
Face recognition approaches can be divided into
two categories: feature based methods (Gao, 2002)-
(Park, 2005) and appearance based methods (Turk,
1991)-(Georghiades, 2001). In feature based meth-
ods, some features such as eyes, nose, and mouth are
extracted, and the geometrical relationship between
them are analyzed for the recognition. This approach
has advantages such as low memory requirement and
robustness to illumination changes. However, during
the process of extracting low-level features, some dis-
tortions may arise. On the other hand, in appearance
based methods, the holistic intensity information of a
face image is represented in terms of principal modes
on a compact low dimensional subspace (Turk, 1991)-
(Belhumeur, 1997). Appearance based approaches
are known to be sensitive to illumination changes and
needs more memory than feature based approach. Up
to now, many techniques have been introduced using
these two approaches. Still, if there are occluded parts
on the face image, recognition rate remains relatively
low. Occluded faces wearing sunglasses or scarfs
are examples of partial information loss. These dam-
aged regions usually degrade the performance of face
recognition system severely. Recently, some methods
for reconstructing partially damaged face have been
developed (Saito, 1999) (Hwang, 2003). They recon-
structed damaged regions by interpolation or extrap-
olation using linear subspace analysis or a morphable
face model. Also, occlusion problem can be handled
by partial matching after detecting and removing the
lost features without direct reconstruction of the lost
information. Leonardis et al. (Leonardis, 1996) re-
jected outliers and dealt with occlusions through a
hypothesize-and-test paradigm using subsets of image
points. On the other hand, Black et al.(Black, 1998)
calculated the coefficients by means of a conventional
robust M-estimator to eliminate outliers. However,
56
Young Kim T., Mu Lee K. and Uk Lee S. (2006).
OCCLUSION INVARIANT FACE RECOGNITION USING TWO-DIMENSIONAL PCA.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 56-61
DOI: 10.5220/0001372500560061
Copyright
c
SciTePress

these methods either need extensive training images
or must satisfy some prior conditions, so they are not
easily applicable for general situation.
In this paper, we propose a novel occlusion invari-
ant face recognition method based on 2D PCA tech-
nique (Yang, 2004). In a subspace obtained after a
transformation by 2D PCA, we can detect occluded
parts by applying a combined k-NN (Earl, 1996) and
1-NN (Dick, 1998) classifier, that consider the relative
distance from test data and its nearest neighbor, and
conduct partial matching only on the non-occluded
parts after eliminating occlusion effect. The proposed
algorithm recognizes a face by excluding unreliable
and inconsistent features without estimation or recon-
struction of the lost information. In addition, unlike
most other algorithms, our algorithm requires only a
single training face image per person; it can be ap-
plied to more general situations where many training
samples are not available.
2 TWO-DIMENSIONAL PCA
In order to perform the conventional PCA for face
recognition, the 2D face image must be transformed
to 1D vectors in advance. The resulting image vec-
tors of faces usually lead to a high-dimensional vec-
tor space (Turk, 1991). Contrast to the conventional
PCA, 2D PCA uses 2D matrices directly rather than
1D vectors. That is, the image matrix does not need to
be transformed into a vector. Also, the image covari-
ance matrix can be constructed directly using the orig-
inal image matrices, and the size of it is much smaller
than that of PCA. The details of 2D PCA can be found
in (Yang, 2004).
Let X denote an n-dimensional unit column vector.
The main idea of 2D PCA is to project image A,an
m × n random matrix, onto X by the following linear
transformation.
Y = AX. (1)
Thus, we obtain an m-dimensional projected vec-
tor Y, which is called the projected feature vector of
image A. To make a performance of 2D PCA better,
we have to determine a good projection vector X.In
fact, the total scatter of the projected samples can be
introduced to measure the discriminative power of the
projection vector X. Moreover, the total scatter of the
projected samples can be characterized by the trace of
the covariance matrix of the projected feature vectors.
Therefore, by maximizing the total scatter of the pro-
jected samples, we can determine a good projection
vector X. The physical significance of a good pro-
jection vector is to find a projection direction X, onto
which all samples are projected, so that the total scat-
ter of the resulting projected samples is maximized.
The covariance matrix of the projected feature vectors
of the training samples can be denoted by
S
x
= E[(Y − EY)(Y − EY)
T
]
= E[(AX − E(AX))(AX − E(AX))
T
](2)
= E[((A − EA)X)((A − EA)X)
T
].
Therefore,
tr(S
x
)=X
T
E[(A − EA)
T
(A − EA)]X. (3)
Let us define the following image covariance matrix.
G
t
= E[(A − EA)
T
(A − EA)]. (4)
We can calculate G
t
directly using the training im-
age samples. Suppose that the training set contains
M samples in total, the j-th training image is denoted
by an m × n matrix A
j
(j =1, 2, ··· ,M), and the
average image of all training samples is denoted by
¯
A. Then, G
t
can be evaluated by
G
t
=
1
M
M
j=1
(A
j
−
¯
A)
T
(A
j
−
¯
A). (5)
Alternatively, the Eq. (3) can be expressed by
tr(S
x
)=X
T
G
t
X. (6)
The unit column vector X that maximizes Eq. (6 is
called the optimal projection axis. This means that the
total scatter of the projected samples are maximized
after the projection of an image matrix onto X,so
that the discriminative power of the projection vector
X is also maximized.
The optimal projection axis X
opt
is the unit column
vector that maximizes Eq. (6), i.e., the eigenvector
of G
t
corresponding to the largest eigenvalue (Yang,
2002). In general, since it is not enough to have only
one optimal projection axis, we usually need to select
a set of projection axes, X
1
, ··· , X
d
, satisfying the
following criterion,
{X
1
, ··· , X
d
} = arg max tr(S
x
). (7)
In fact, the optimal projection axes, X
1
, ··· , X
d
, are
the eigenvectors of G
t
corresponding to the first d
largest eigenvalues.
After finding the optimal projection axes of 2D
PCA, they are used for feature extraction. For a given
image sample A, we can obtain the following princi-
pal component vectors
Y
k
= AX
k
,k =1, 2, ··· ,d. (8)
These principal component vectors are used to form
an m×d matrix B =[Y
1
, ··· , Y
d
] called the feature
matrix, which characterize the image sample A in the
2D PCA space.
OCCLUSION INVARIANT FACE RECOGNITION USING TWO-DIMENSIONAL PCA
57
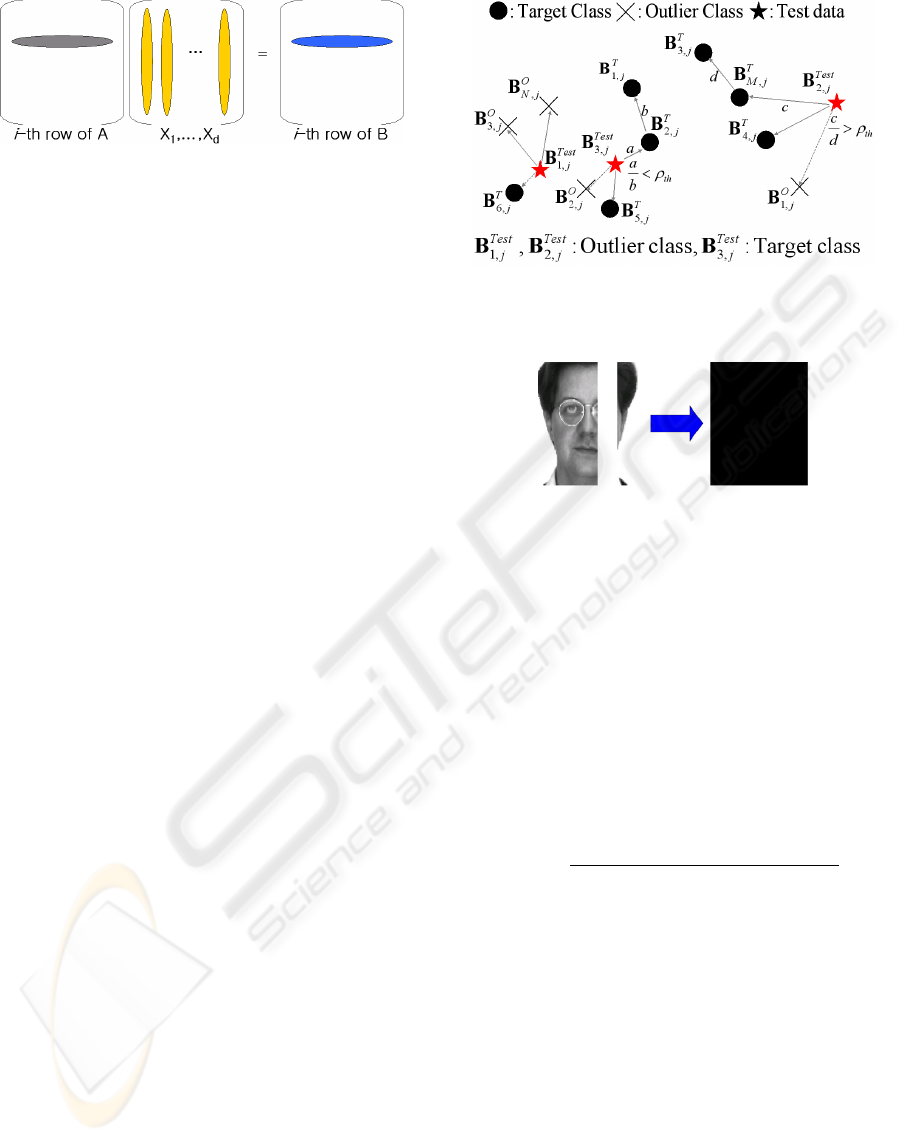
Figure 1: Matrix multiplication process of 2D PCA.
3 OCCLUSION DETECTION AND
PARTIAL MATCHING USING
2D PCA
3.1 Occlusion Detection
One interesting property of 2D PCA is that each row
of an image A is projected onto the optimal projec-
tion axes and produces a corresponding row of the
feature matrix (Fig. 1), i.e., the i-th row of a feature
matrix represents the projection of the i-th row of the
image in 2D PCA subspace. Therefore, by analyzing
each row of the feature matrix statistically and inde-
pendently, we can identify the occluded rows or local
regions in the image.
The process of occlusion detection is a type of
one-class classification problem which discriminates
a face region from non-face ones. In this case, a
face regions belong to a target class and the occluded
face regions belong to an outlier class. One-class
classification techniques can be categorized into two
types (Dick, 1998). One is the unsupervised clas-
sifiers that use only the samples of the target class
for training. The other is the supervised classifiers
that employ the sample training objects of both target
and outlier classes. Although it needs additional ef-
forts for providing outlier samples during the training
process, generally the supervised method gives better
result than unsupervised one. Therefore, after obtain-
ing the distributions of every row of both normal and
occluded face images’ feature matrices, we can apply
a supervised one class classifier to each row for the
detection of occluded face parts.
In this paper, we developed and used a new super-
vised one class classifier which combines the k-NN
and a modified 1-NN classifier (Dick, 1998) sequen-
tially. Note that usually the k-NN classifier shows
good performance for one class classification. How-
ever, since no distance constraint is considered, mis-
classification may occur when a test data is located far
away from the training samples and most of the near-
est neighbors belong to a target class. In this case, the
test data is assigned to the target class even though it
is an outlier object. In order to resolve this problem,
we employ the relative distance-based 1-NN classifier
Figure 2: Occlusion detection using a combined k-NN and
1-NN classifier.
Figure 3: The problem of occlusion detection by row.
(Dick, 1998) for a post verification for the decision of
target class.
The proposed classifier works as follows: For a test
data x, k-NN classifier first seeks the k nearest sam-
ples among the training samples. Among these k clos-
est samples, if the number of outlier class samples is
more than that of target class samples, the test data
is classified as an outlier object. Otherwise, we ap-
ply 1-NN classifier to the target class samples only by
using the relative distance from x to its first nearest
neighbor in the training set defined by
ρ
NN
(x)=
||x − NN
tr
(x)||
||NN
tr
(x) − NN
tr
(NN
tr
(x))||
, (9)
where NN
tr
(x) denotes the nearest neighbor of ob-
ject x in the training set. If it is smaller than a pre-
specified threshold value, then the test data x is clas-
sified as a target object, otherwise, it is assigned to
the outlier class. Let us denote B
T
i
and B
O
i
as the i-th
feature matrices of training images in target class and
outlier class, respectively. For a given test image A
i
,
we obtain its feature matrix denoted by
B
Test
i
=
⎡
⎢
⎢
⎢
⎣
B
Test
i,1
B
Test
i,2
.
.
.
B
Test
i,m
⎤
⎥
⎥
⎥
⎦
. (10)
The occlusion detection is done for each row vector,
B
Test
i,j
,j =1,...,m that corresponds to image row,
VISAPP 2006 - IMAGE UNDERSTANDING
58
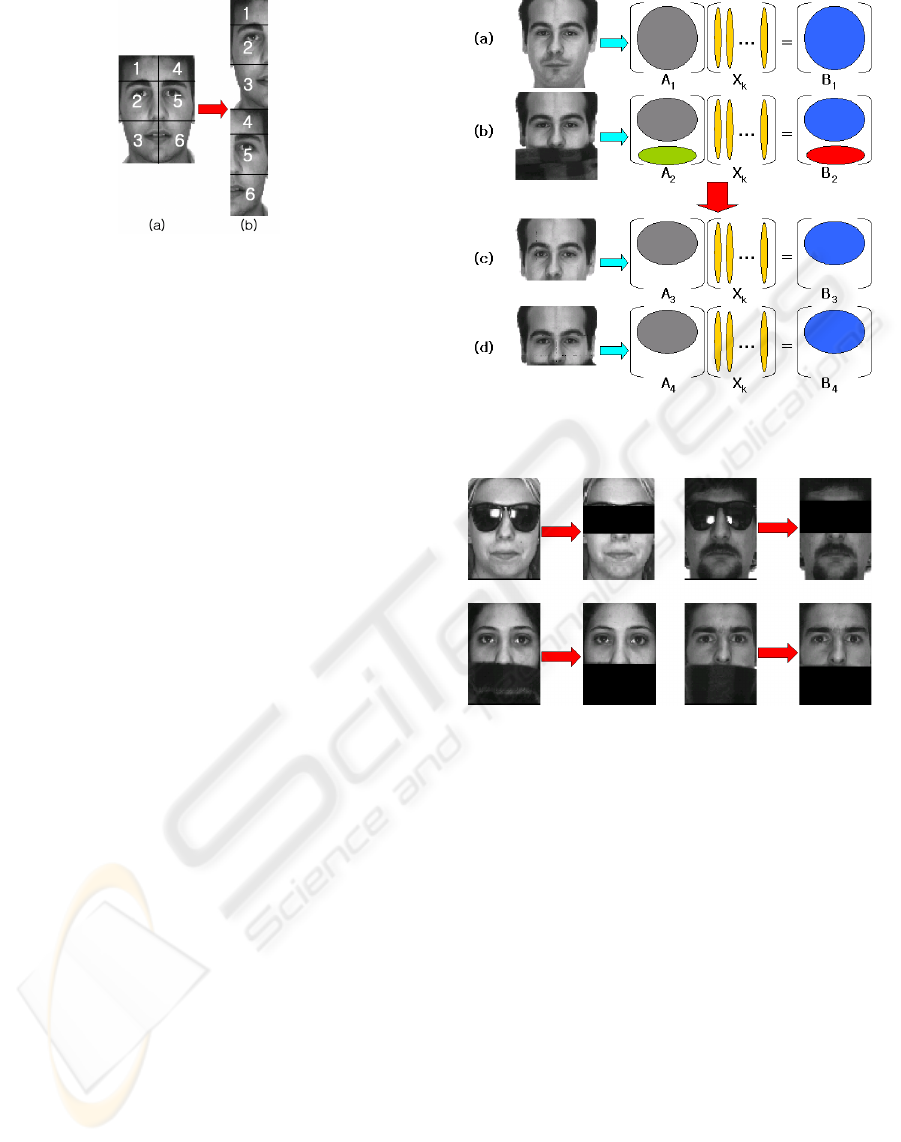
Figure 4: Image partitioning and transformation.
independently by the method described above. Fig.
2 shows the examples of the proposed classification
results for some row features. Note that although
the row-based occlusion detection scheme shows a
good result, it cannot cope with vertical occlusions
efficiently. For example, If we apply the row-based
occlusion detection scheme to the occluded face im-
age in Fig. 3, the entire image is considered to be
occluded since all the rows contain occluded regions.
To overcome this horizontal localization problem, we
divide a face image into two columns and concate-
nate them into a single one as shown in Fig. 4. After
transforming all images in this way and performing
the training with these transformed images, we apply
a combined k-NN and 1-NN classifier to each row of
the input feature matrix. Alternative method is to par-
tition the column into several blocks as shown in Fig.
4 (b), and investigate the block-based occlusion by
analyzing corresponding features of each block.
3.2 Partial Matching
We perform partial matching of faces using the cor-
responding feature matrices after removing the rows
detected as occluded regions. Fig. 5 shows the idea.
If feature matrices B
1
and B
2
are matched directly,
the matching result may not be reliable due to the ef-
fect of the occluded part. While, by using B
3
and B
4
obtained after removing the occluded rows, we can
achieve occlusion invariant matching results.
The dissimilarity measure between a target feature
matrix B
T
i
=[B
T
i,1
,···, B
T
i,m
]
T
and a test feature ma-
trix B
Test
j
=[B
Test
j,1
,···, B
Test
j,m
]
T
, is defined by
d(B
T
i
, B
Test
j
)=
m
k=1
ω
k
B
T
i,k
− B
Test
j,k
2
, (11)
where
ω
k
=
0 if B
Test
j,k
is an occluded row
1 otherwise
(12)
Figure 5: Partial matching after removing occlusion.
Figure 6: The result of occlusion detection by row.
and ||B
i,k
− B
j,k
||
2
denotes the Euclidean distance
between the two k-th rows of feature matrices B
i
and
B
j
.
4 EXPERIMENTAL RESULTS
4.1 Experimental Environment
To evaluate the performance of the proposed algo-
rithm, we tested it on AR face database (AR, 1998).
Specifically, we used neutral frontal images and oc-
cluded face images wearing sunglasses or scarfs. The
performance of the proposed algorithm has been com-
pared to those of the conventional approaches in-
cluding 1-NN, Eigenface (Turk, 1991), NMF method
(Lee, 1999), and modified local NMF (LNMF) (Li,
2001) method. In addition to these methods, it
has been also compared to those of the LEM based
OCCLUSION INVARIANT FACE RECOGNITION USING TWO-DIMENSIONAL PCA
59

Figure 7: Some false alarms.
method (LEM) (Gao, 2002) by Gao et. al., the
technique proposed by Martinez(AMM) (Martinez,
2002), and Park’s face-ARG technique (Park, 2005).
Similar to our method, these three methods used a
single frontal view image per person as a reference
model, and the performances on the AR face database
were reported in (Gao, 2002), (Martinez, 2002), and
(Park, 2005), respectively. For comparison, we have
referred their recognition rates. All 135 people (76
men and 59 women) in the AR face database were
used. Among these, all 135 normal face images and
70 occluded face images (35 sunglass images and 35
scarf images of 20 men and 15 women) were used
for the training the target class and the outlier class,
respectively. The remaining 100 sunglass images and
100 scarf images were used for probes and all the nor-
mal frontal faces were used for the gallery.
4.2 Occlusion Detection and Partial
Matching Results
Fig. 6 and 7 show some results of occlusion detection
by the proposed combined k-NN and 1-NN classifier
to every row of feature matrix, in which the occluded
rows are displayed by black lines. For most figure
we can detect occlusions accurately. However, there
are some false alarms as shown in Fig. 7. Fig. 8
shows the results of the block-based occlusion detec-
tion with 6 regions, and Fig. 9 presents the results
of occlusion detection to each individual row of the
transformed images in Fig. 4 (b). We observed that
the ’row after transformation’ method gave the best
detection results.
Face recognition test was conducted using the pro-
posed algorithm explained in section 3, with the dis-
similarity measure defined in Eq. (11). The recogni-
tion results of the proposed algorithm are compared
to other algorithms and summarized in Table 1. Form
these results, we can conclude that the proposed par-
tial face recognition algorithm outperforms the con-
ventional face recognition techniques.
Figure 8: The result of occlusion detection by region.
Figure 9: The result of occlusion detection by row after im-
age transformation.
4.3 Classifier Test to Synthetic
Occlusions
Note that the occlusion patterns in AR database are
limited to sunglasses and scarfs. Therefore, we have
tested the proposed occlusion detection algorithm to
other types of occlusions. Fig 10 (a) shows the results
for the synthetic white occlusion masks, and Fig 10
(a) presents those for the occlusion masks generated
by random noise. These experimental results demon-
strate that the new combined k-NN and 1-NN classi-
fier can work satisfactory to other types of occlusion
patterns.
5 CONCLUSION
In this paper, we proposed a novel occlusion invari-
ant face recognition algorithm using 2D PCA. In 2D
PCA subspace, a face is described by a feature ma-
trix. Therefore, by finding occluded parts by every
row in feature matrix accurately, we are able to re-
move severe distortions caused by occlusions. Since
the proposed algorithm can detect and exclude unre-
liable and inconsistent parts by combining k-NN and
1-NN classifier sequentially, it recognizes a face very
accurately. The performance of the proposed algo-
rithm has been tested on the AR face database. The
results show that for the faces with occlusions by sun-
glasses or scarfs, the proposed algorithm produces
more robust and reliable results over other existing
methods.
VISAPP 2006 - IMAGE UNDERSTANDING
60
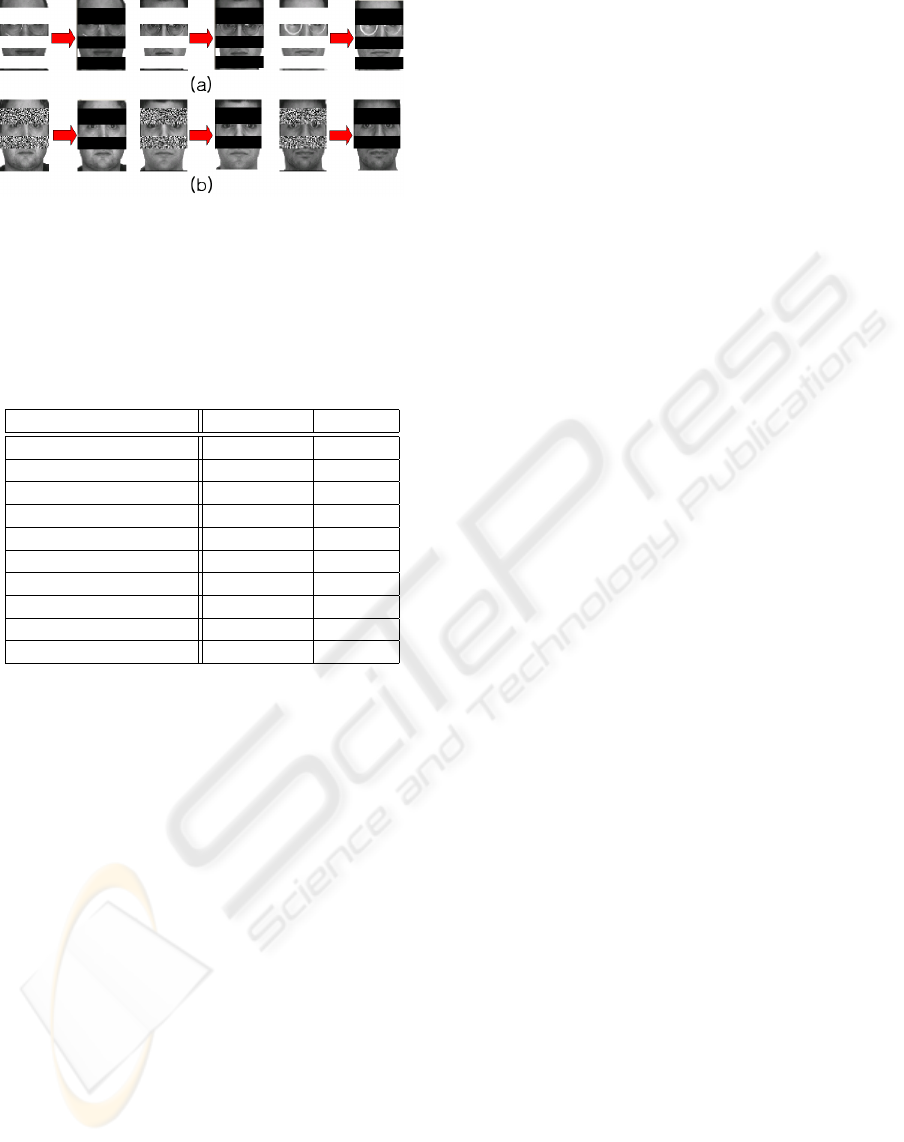
Figure 10: Classifier test to virtual occlusions.
Table 1: The recognition rate under occlusion on the AR
face database : Proposed method (a) occlusion detection by
row, (b) occlusion detection by 6 regions, and (c) occlusion
detection by row after image transformation as shown in
Fig. 4 (b).
Detection Method Sunglasses Scarfs
Proposed Method (a) 98.00% 99.00%
Proposed Method (b) 96.00% 98.00%
Proposed Method (c) 98.00% 98.00%
1-NN 43.18% 20.45%
PCA 43.18% 20.45%
NMF 25.00% 2.27%
LNMF 43.18% 13.64%
AMM 80.00% 82.00%
LEM 68.18% 63.64%
Face-ARG 73.48% 87.88%
ACKNOWLEDGEMENTS
This work has been supported in part by the 3DRC
(3D Display Research Center) under the ITRC (In-
formation Technology Research Center) program of
Korean government.
REFERENCES
Zhao, W. Y., Chellappa, R., Rosenfeld, A. and Phillips, P.
J. (2000). Face Recognition : A Literature Survey. In
UMD CfAR Technical Report CAR-TR-948.
Gao, Y. and Leung, M. K. H. (2002). Face Recognition Us-
ing Line Edge Map. In IEEE Trans. Pattern Analysis
and Machine Intelligence, vol.24, no.6, pp.764-779.
Park, B. G., Lee, K. M. and Lee, S. U. (2005). A Novel
Face Recognition Technique Using Face-ARG Match-
ing. In IEEE Trans. Pattern Analysis and Machine In-
telligence, vol 27, no. 12, pp.1982-1988.
Turk, M., Pentland, A. (1991). Eigenfaces for Recognition.
In Journalof Cognitive Neuroscience, vol.3, pp.71-86.
Belhumeur, P. N., Hepanha, J. P. and Kriegman, D. J.
(1997). Eigenfaces vs. Fisherfaces : Recognition Us-
ing Class Specific Linear Projection. In IEEE Trans.
Pattern Analysis and Machine Intelligence, vol.19,
no.7, pp.711-720.
Georghiades, A. S., Belhumeur, P. N. and Kriegman, D. J.
(2001). From Few to Many : Illumination Cone Mod-
els for Face Recognition under Variable Lighting and
Pose. In IEEE Trans. Pattern Analysis and Machine
Intelligence, vol.23, no.6, pp.643-660.
Saito, Y., Kenmochi, Y. and Kotani, K. (1999). Estimation
of eyeglassless facial images using principal compo-
nent analysis. In IEEE International Conference on
Image Processing, vol.4, pp.192-201.
Hwang, B. W. and Lee, S. W. (2003). Reconstruction of
partially damaged face images based on a morphable
model. In IEEE Trans. Pattern Analysis and Machine
Intelligence, vol.25, no.3, pp.365-372.
Leonardis, A. and Bischof, H. (1996). Dealing with Oc-
clusions in the Eigenspace Approach. Proceedings
of IEEE Conference on Computer Vision and Pattern
Recognition.
Black, M. and Jepson, A. (1998). Eigentracking : Robust
matching and tracking of articulated objects using a
view-based representation. In International Journal
of Computer Vision, vol.26, no.1, pp.63-84.
Yang, J., Zhang, D., Frangi, A. F. and Yang, J. Y.
(2004). Two-Dimensional PCA:ANewApproach to
Appearance-Based Face Representation and Recogni-
tion. In IEEE Trans. Pattern Analysis and Machine
Intelligence, vol.26, no.1.
Gose, E., Johnsonbaugh, R. and S. Jost (1996). The
Book. Pattern Recognition and Image Analysis, Pren-
tice Hall.
Yang, J., Yang, J. Y. (2002). From Image Vector to Ma-
trix : A Straightforward Image Projection Technique-
IMPCA vs. PCA. In Pattern Recognition, vol.35, no.9,
pp.1997-1999.
Ridder, D., Tax, D. M. J. and Duin, R. P. W. (1998). An
Experimental Comparison of One-Class Classification
Methods. In Proceedings of the Fourth Annual Con-
ference of the Advanced School for Computing and
Imaging, Delft.
Martinez, A. M. and Benavente, R. (1998). The AR Face
Database. In CVC Technical Report, no.24.
Lee, D. D. and Seung, H. S. (1999), Learning the parts of
objects by non-negative matrix factorization. In Na-
ture, vol.401, pp.788-791.
Li, S. Z., Hou, X. W., Zhang, H. J. and Cheng, Q. S. (2001).
Learning spatially localized, part-based representa-
tion. In Proceedings of IEEE Conference on Computer
Vision and Pattern Recognition, pp.207-212.
Martinez, A. M. (2002). Recognizing Imprecisely Lo-
calized, Partially Occluded, and Expression Variant
Faces from a Single Sample per Class. In IEEE Trans.
Pattern Analysis and Machine Intelligence, vol.24,
no.6, pp.748-763.
OCCLUSION INVARIANT FACE RECOGNITION USING TWO-DIMENSIONAL PCA
61
