
HAND POSTURE DATASET CREATION FOR GESTURE
RECOGNITION
Luis Anton-Canalis
Instituto de Sistemas Inteligentes y Aplicaciones Numericas en Ingenieria
Campus Universitario de Tafira, 35017 Gran Canaria, Spain
Elena Sanchez-Nielsen
Departamento de E.I.O. y Computacion
38271 Universidad de La Laguna, Spain
Keywords:
Image understanding, Gesture recognition, Hand dataset.
Abstract:
This paper introduces a fast and feasible method for the collection of hand gesture samples. Currently, there
are not solid reference databases and standards for the evaluation and comparison of developed algorithms
in hand posture recognition, and more generally in gesture recognition. These are two important issues that
should be solved in order to improve research results. Unlike previous hand image datasets, which creation
usually involves many different people, sceneries and light conditions, we propose a simplified method that
requires just a single person’ hand being recorded in a controlled light environment. Our method allows the
generation of thousands of heterogeneous samples within hours, thus saving time and people’s efforts. The
resulting dataset has been tested with a cascade classifier, although it may be used by most pattern recognition
systems, and compared with a classical dataset obtaining similar results.
1 INTRODUCTION
Hand gesture recognition (Wu and Huang, 1999) im-
plies several requirements: an appropriate hand ges-
ture image dataset, the proper detection of hands or
specific gestures on video streams and finally the
recognition of the gesture. In a previous work (Anton-
Canalis et al., 2005b), we presented a method for
the detection of hands in video streams, formulated
in terms of the integration and combination of tem-
poral coherence information and a cascade classi-
fier method. Temporal coherence information was
supplied by a template tracker (Anton-Canalis et al.,
2005a) with the aim of achieving real-time perfor-
mance. Using Viola and Jones’ pattern recognition
method in grey level images (Viola and Jones, 2001)
we were able to achieve a high detection rate (0.99)
while maintaining a low error rate (0.03). The set of
hand samples used in the training stage was created
gathering hand images from different sources such as
(Triesch, 2000). However, it was not specifically de-
signed for our purposes, so there was a need for re-
building the hand image dataset. Unlike face detec-
tion systems (Zhao et al., 2003), there are not many
available hand datasets that meet the constrains that
cascade classifiers oriented towards hand detection
impose. In this paper, we propose a simplification of
the sample collecting process, reducing it to a single
person’s hand gesture set filmed under different light
conditions, avoiding the necessity for the variation of
backgrounds and subjects.
1.1 Previous Work
Cascade classifiers are currently considered the
fastest and most accurate pattern detection method
for faces in monocular grey-level images (Viola and
Jones, 2001) Its efficiency has been proven in re-
cent works in a wide range of conditions. However,
while frontal faces share common features (eyes, eye-
brows, nose, mouth, hair...), hands are not so easily
described. Their flexibility makes of them highly de-
formable objects, so it is hard to train a cascade clas-
sifier for detecting hands. Some approaches involving
cascade classifiers include training a different classi-
fier for each recognizable gesture (K
¨
olsch and Turk,
2004b), or a single classifier for a limited set of hands
(Stenger et al., 2004) but that leads to the detection of
a low number of gestures, or forces the user to per-
form very precise gestures (K
¨
olsch and Turk, 2004a).
We proposed a cascade classifier which was trained
to detect wrists (Anton-Canalis et al., 2005b), being
the main advantage of this approach the high indepen-
dence from the gesture being made. Hands were de-
197
Anton-Canalis L. and Sanchez-Nielsen E. (2006).
HAND POSTURE DATASET CREATION FOR GESTURE RECOGNITION.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 197-200
DOI: 10.5220/0001370401970200
Copyright
c
SciTePress

tected without taking into account the gesture, with no
limitation in the number of gestures being detected, as
long as wrists were not concealed. Additionally, there
was no need for an initialization step. Figure 1 shows
some detection examples.
Figure 1: Five positive results showing both wrists detec-
tions (dark rectangle) and complete hands (white rectangle).
2 SAMPLE SET CONSTRUCTION
Cascade classifiers need both positive and negative
samples for their training. Negative samples should
be as numerous and dissimilar as possible, and they
should not contain the target object, i.e hands. Pos-
itive samples should show as many different target
object views as possible, in different conditions. In
relation to frontal faces, for example, it is advisable
to maximize three variables: subjects, facial gestures
and light source directions. There are many databases
where these circumstances are met (orl, ) (Georghi-
ades et al., 2001). Hands, however, add a fourth vari-
able: background. While in a face sample there is no
need to show nothing else than a face, it is not possible
to show a hand without showing pieces of background
between unbended fingers. Any gesture apart from a
fist will show what lies behind the hand, and thus it
becomes part of the positive sample.
A set of positive hand samples created for a cascade
classifier should also add so many different back-
grounds as possible, allowing the classifier to infer
what is the real target object. Although there are some
hand databases available, it is difficult to find the four
requisites together. In (Triesch, 2000), for example,
there are around 15 different backgrounds and 25 sub-
jects, but only 9 gestures. Thus, this set is suitable for
the training of a single classifier for each gesture, as in
(K
¨
olsch and Turk, 2004b), but not for a more general
one. Being conscious of the high difficulty in meeting
the constrains that a hand dataset imposes during its
creation, we propose a method which tries to reduce
them to only two requirements: different light sources
and different gestures. Thus, hand gestures are per-
formed by a single person under different light con-
ditions, filmed against a background having a single
color or a relatively narrow range of colors (chroma
key or color keying). Then, each sample may suffer
a slight geometrical transformation (stretching and/or
rotation) and finally a random image, chosen from a
high amount of images not showing hands, substitutes
the chroma signal. Using the chroma key technique,
it is possible to create a set of positive hand sam-
ples large enough to train and test a cascade classi-
fier, avoiding the troubles of gathering many different
people and backgrounds, thus saving time.
For testing purposes, we assembled a recording set
with a green chroma screen, six spot lights and a
single ambient light with fixed intensity and color.
Lights where placed in front of the actor, on his left,
right and in front of him, three at the same hand
height, and three around two meters above the hand
height, as seen in Figure 2. This way, it was possi-
ble to record six sequences with different light condi-
tions. A total amount of 288 images where extracted
from the recorded sequences, showing more than 20
gestures under each light setup.
Figure 2: Side and front view of the recording set. White
circles represent light sources.
Then, the chroma key was substituted four times in
each image with a random background image, taken
from a group of more than 5000, generating four new
samples, each of them also mirroed. No geometric
transformation was applied to the original image. Fig-
ure 3 shows the main process steps for a given ges-
ture. The final dataset consist in a total amount of
2304 20x20 grey level images. Figure 4 shows sam-
ples from our previous dataset and samples from the
new one.
VISAPP 2006 - IMAGE UNDERSTANDING
198
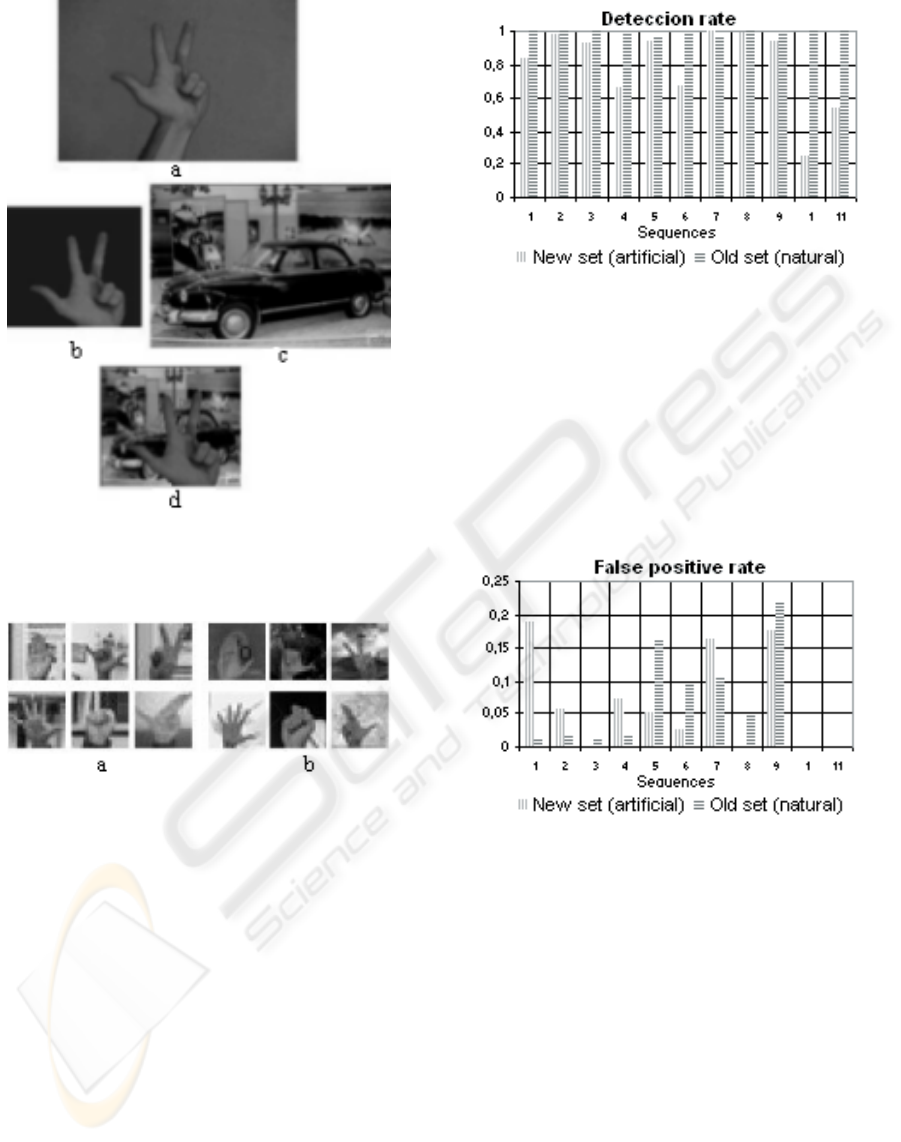
Figure 3: a) Original recorded image b) image cleaned and
trimmed c) random background image d) final chroma sub-
stitution. The whole process is totally automated.
Figure 4: a) Natural in-place hand images b) samples ob-
tained with the chroma technique.
3 SYNTHETIC DATASET
PERFORMANCE
In order to analyze the goodness of a synthetic dataset
(hands combined with random backgrounds) in con-
trast to a natural dataset (in-place taken hand images),
we trained a cascade classifier with the set of new
samples created with the chroma key approach. Then
we applied it on a number of videos (11) that had been
previously studied in (Anton-Canalis et al., 2005b)
with a cascade classifier trained with a natural dataset.
Figures 5 and 6 show their respective detection rate
(number of frames where there was a detection in the
total amount of frames) and false positives rate. The
lower detection rate of the new classifier, which de-
creases the previous detection rate from 0.99 to 0.79,
Figure 5: Detection rate for each sequence. Seq. 10 and 11
are clearly problematic, due to light conditions.
is the consequence of the poor results obtained mainly
in two sequences, where we get a detection rate of
0.24 and 0.54. In both of them, ambient light con-
ditions seem to be drastically different from the one
used in the synthetic hand set. This points out the
necessity for more light configurations in the record-
ing set. Although the global false positive rate raises
Figure 6: False positive rate. While some sequences are
worse (1,2,4,6), others behave better (3,5,6,8,10,11).
slightly from 0.062 to 0.066, there is a significant
improvement in those sequences where the detection
rate is maintained.
4 OVERALL RESULTS AND
DISCUSSION
While results obtained with the synthetic set are in
some degree not so good as those obtained with the
natural set, they are quite positive. It must be taken
into account that the synthetic set was created in no
more than six hours, including the setup of the record-
ing set (chroma screen, camera and lights), filming all
the gestures and the final chroma substitution, and that
HAND POSTURE DATASET CREATION FOR GESTURE RECOGNITION
199

a single person was required as a hand model, instead
of a large group. The in-place picture method requires
much more time. It is necessary to persuade a large
group of people, vary backgrounds, get different light
conditions and in some cases, images must be manu-
ally marked and segmented in order to extract hands
from them.
The low detection rate, however, could be avoided
maintaining the use of the tracking system when the
cascade classifier failed, but it was necessary for
comparison purposes to preserve the previous system
structure.
5 CONCLUSIONS AND FUTURE
WORK
In previous works (Anton-Canalis et al., 2005b) we
proposed a cascade classifier trained to detect wrists
as a simplification of the problem of finding hands in
still images or videos.These kind of classifiers seem
to be suitable for this task, given an appropriate train-
ing set. In our case, the training set was not created
specifically for our purposes. Even thought the pre-
liminary condition of positive samples, we found re-
sults to be promising enough to develop this approach.
We have presented a method for hand gesture
sampling that simplifies this otherwise arduous task.
Therefore, with the aid of a single person and the
proper recording set, it is possible to generate a large
and assorted hand image set. This method may be
applied to any kind of object which morphological at-
tributes force pieces of background to be present in
positive samples (i.e. concave shapes), and used with
most pattern recognition methods that require training
samples.
Future research will investigate the possibility of
using artificially generated hands, with a 3D render-
ing software, as training sets in cascade classifiers.
The ultimate aim is to totally get rid of the neces-
sity of an actor, and moreover, the meticulous setup
of lights.
ACKNOWLEDGMENTS
This work has been supported by the Spanish Gov-
ernment and the Canary Islands Autonomous Govern-
ment under projects TIN2004-07087 and PI2003/165.
REFERENCES
Anton-Canalis, L., Sanchez-Nielsen, E., and Castrillon-
Santana, M. (2005a). Fast and accurate hand pose de-
tection for human-robot interaction. In Lecture Notes
in Computer Science LNCS 3522, pages 553–560.
Anton-Canalis, L., Sanchez-Nielsen, E., and Castrillon-
Santana, M. (2005b). Hand pose detection for vision-
based gestures interface. In IAPR MVA 2005.
Georghiades, A., Belhumeur, P., and Kriegman,
D. (2001). From few to many: Illumina-
tion cone models for face recognition under
variable lighting and pose. IEEE Trans. Pat-
tern Anal. Mach. Intelligence, 23(6):643–660.
http://cvc.yale.edu/projects/yalefacesB/yalefacesB.html.
K
¨
olsch, M. and Turk, M. (2004a). Analysis of rotational ro-
bustness of hand detection with a viola-jones detector.
In ICPR (3), pages 107–110.
K
¨
olsch, M. and Turk, M. (2004b). Robust hand detection.
In FGR, pages 614–619.
orl. Orl face database.
http://www.uk.research.att.com/facedatabase.html.
Stenger, B., Thayananthan, A., Torr, P. H. S., and Cipolla,
R. (2004). Hand pose estimation using hierarchical
detection. In Computer Vision in Human-Computer
Interaction, pages 105–116.
Triesch, J. (2000). Hand posture database
i, ii. http://www.idiap.ch/ mar-
cel/Databases/gestures/main.php.
Viola, P. A. and Jones, M. J. (2001). Rapid object detection
using a boosted cascade of simple features. In CVPR
(1), pages 511–518.
Wu, Y. and Huang, T. S. (1999). Human hand modeling,
analysis, and animation in the context of HCI. In ICIP
(3), pages 6–10.
Zhao, Chellappa, Phillips, and Rosenfeld (2003). Face
recognition: A literature survey. CSURV: Computing
Surveys, 35.
VISAPP 2006 - IMAGE UNDERSTANDING
200
