
A NOVEL ASYMMETRIC VARIANCE-BASED HYPOTHESIS
TEST FOR A DIFFICULT SURVEILLANCE PROBLEM
Dalton Rosario
Army Research Laboratory, 2800 Powder Mill Road, Adelphi, MD, 20783, U.S.A.
Keywords: Anomaly detection, Asymmetric hypothesis test, Hyperspectral imagery
.
Abstract: Local anomaly detectors have become quite popular for applications requiring hyperspectral (HS) target
detection in natural clutter background assisted by an image analyst. Their popularity may be attributed to
the simplicity of the algorithms designed to function as such. A disadvantage of using such detectors,
however, is that they often produce an intolerable high number of detections per scene, which—according to
image analysts—becomes a nuisance rather than an aiding tool. We present an effective local anomaly
detector for HS data. The new detector exploits a notion of indirect comparison between two sets of samples
and is free from distribution assumptions. The notion led us to derive a compact solution for a variance test,
in which, under the null hypothesis, the detector’s performance converges to a known distribution.
Experimental results using both simulated multivariate data and real HS data are presented to illustrate the
effectiveness of this detector over five known alternative techniques
.
1 INTRODUCTION
Local anomaly detectors have become quite popular
for applications requiring target detection in natural
clutter background assisted by an image analyst.
Their popularity may have been attributed to the
simplicity built into these algorithms. Detectors from
this family search the pixels of sensor imagery for
rare pixels whose information significantly differs
from the local background. These detectors then are
poised to find both known and unknown target
types. The disadvantage, however, is that they often
produce an intolerable high number of detections per
scene, which according to image analysts becomes a
nuisance rather than an aiding tool.
Recently, the use of hyperspectral sensor
imagery (HSI) has also gained renewed attention in
the target detection community. Its popularity over
broadband imagery (e.g., forward looking infrared)
is due to the fact that these passive sensors
simultaneously record images for hundreds of
contiguous and narrowly spaced regions of the
electromagnetic spectrum. Each image corresponds
to the same ground scene, thus creating a cube of
images that contain both spatial and spectral
information about the objects and backgrounds in
the scene. HSI has been used in various fields
including geology, urban planning, geography,
cartography, and the military (Schowengerdt, 1997).
A host of different types of anomaly detectors and
their performances in HSI are discussed in
(Manolakis, 2002), (Kwon, 2003), (Schweizer,
2000), and (Yu, 1997).
Our recent interest has been on a general idea for
anomaly detection, one that performs a comparison
between two observations by an indirect means. The
implementation of this idea has the potential to
preserve the number of meaningful anomaly
detections and to significantly reduce the number of
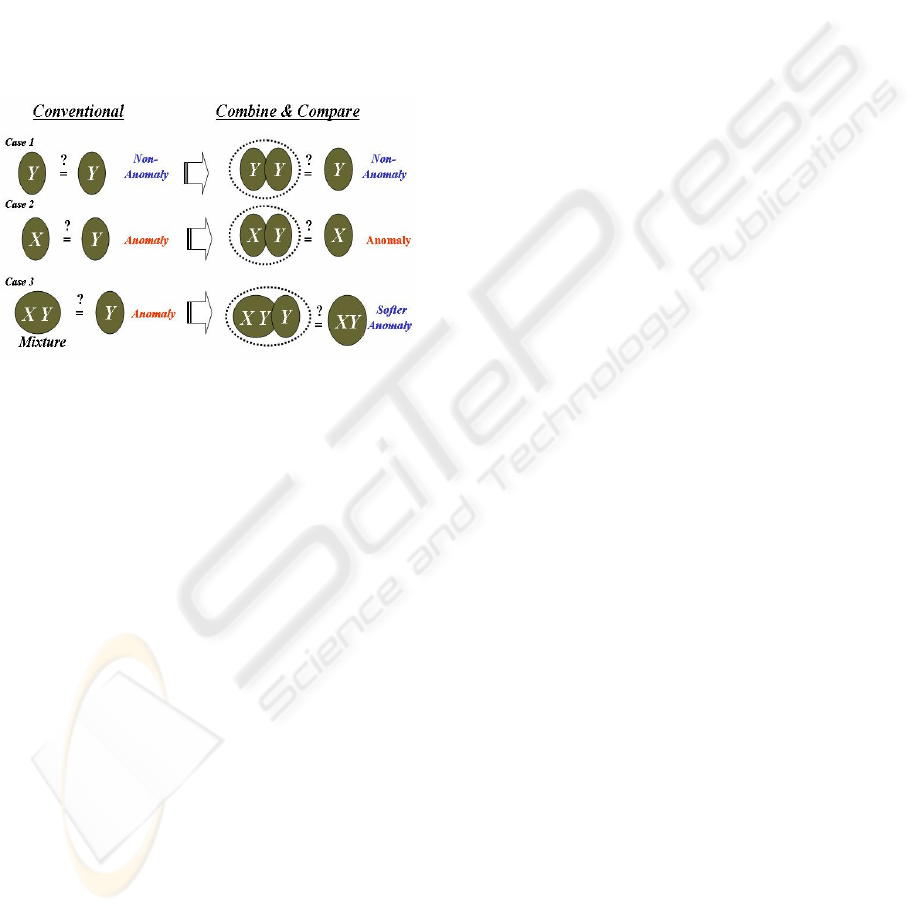
meaningless anomaly detections. Fig. 1 clarifies this
principle.
Comparing two samples from digitized imagery
often yields three particular study cases: (1) results
from two relatively pure samples belonging to the
same population (Y in Fig. 1), (2) results from two
relatively pure samples belonging to distinct
populations (X and Y), and (3) results from a
composite sample (XY mixture) and a single
component (e.g., Y) sample of that mixture. For
example, a comparison between two observations
sampled from the same tree class falls under case 1,
a comparison between a sample from a ground
vehicle and a sample from a local grass falls under
case 2, and a comparison between a sample with two
components (e.g., a tree & its shadow) and a sample
277
Rosario D. (2006).
A NOVEL ASYMMETRIC VARIANCE-BASED HYPOTHESIS TEST FOR A DIFFICULT SURVEILLANCE PROBLEM.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 277-284
DOI: 10.5220/0001360802770284
Copyright
c
SciTePress
from one of these components (e.g., shadow) falls
under case 3.
Using a conventional dual rectangular window
(see Fig. 2) to sample locally the imagery, one can
readily verify that case 3 appears quite often and is
arguably responsible for generating a high number
of nuisance detections. The reason is that region
discontinuities are abundant in scene imagery. Local
anomaly detectors based on conventional statistical
methods tend to declare a spectral sample near a
transition of spectral class regions as a local
anomaly. This declaration is correct in the statistical
sense, but also unfortunate, because a local anomaly
detector seems to behave more like an edge detector.
F
Figure 1: The number of nuisance detections may be
significantly reduced by comparing, instead, the union of
candidate samples to one of the candidates. Another
advantage of using this principle is that the number of
meaningful detections is preserved.
We can convert this weakness to strength by
comparing in some form the union of the two
samples to one of the individual observations. Fig. 1
depicts the notion of this indirect approach and its
relevance to comparing two samples. Using this
notion, it is plausible that results for cases 1 and 2
would be unaffected in the statistical sense, but that
results for case 3 would be affected, as shown,
because the construction of a new sample (consisting
of both XY and Y) merely adds more evidence about
Y, making the original composite sample XY a softer
anomaly in respect to the combined sample XYY.
The focus in this paper is to propose a compact
anomaly detector that exploits the principle of
indirect comparison depicted in Fig 1. This new
detector is based on a nonparametric model and has
an asymptotic behavior of the chi square distribution
with 1 degree of freedom. For convenience, this
detector will be referred to as the Asymmetric
Variance Test (AVT) detector.
This paper is organized as follows: Section 2
formulates the technical problem. Section 3 proposes
the AVT detector. Section 4 describes alternative
techniques. Section 5 compares results between the
AVT detector and alternative techniques using
simulated multivariate data and real hyperspectral
(HS) data. Section 5 concludes the paper.
2 PROBLEM FORMULATION
Let B be the clutter background of a simulated
multispectral cube having size r x c x b. Let B
consist of highly correlated but distinct multivariate
random samples of multiple homogeneous classes C
k
(k = 1, …, n
c
).
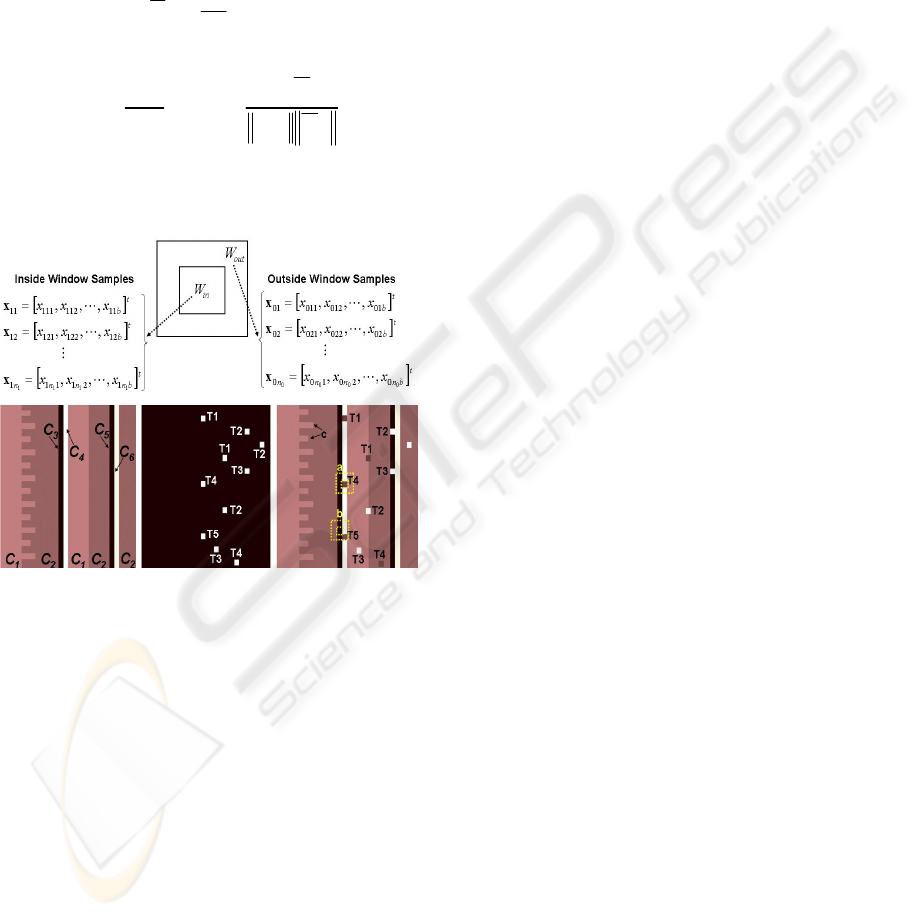
Now consider a dual rectangular window, as
shown in Fig. 2 (top) and in Fig 2 (bottom) as dotted
boxes at positions a and b, separating the local area
into two regions—the inner window region (W
in
) and
the outer window region (W
out
). This dual window
will slides concentrically across the area r x c in
each simulated cube, such that, at each discrete
position in the imagery, multivariate vector samples
[
]
t
x
pbppp
xxx
020100
,,, L=
(p = 1, … n
0
) that are
viewed within W
out
will be compared in some form
to multivariate vector samples
[
]
t
x
qbqqq
xxx
121111
,,, L=
(q = 1, … n
1
) that are
viewed within W
in
. The size of the dual window is
set such that the W
in
encloses a target sized region
and the W
out
includes its surrounding region. If the
dual window is placed within a spatially
homogeneous region consisting of similar types of
materials, such as natural backgrounds, the statistical
characteristics of samples that are observed within
W
in
and W
out
will be similar to each other. Samples
within W
in
and W
out
will contain significantly
different statistical features, if the dual window is
centered on a region where a target, for instance, is
surrounded by its local background. Use of
appropriate cutoff thresholds on anomaly detectors’
outputs would allow most targets to be detected as
local anomalies, but unfortunately a high number of
detections is attributed to background responses.
A proportionally sized dual rectangular window
with respect to the cubes’ sizes is shown at different
positions on B, see Fig. 2 (bottom). Depending on
the detection technique being used, these
multivariate samples
p0
x
and
q1
x
will be
transformed into two sequences
(
)
0
0010
, ,
n
xxx L
=
and
(
)
1
1111
, ,
n
xxx L=
for
comparison. This transformation is discussed next.
VISAPP 2006 - IMAGE ANALYSIS
278
In general, local spectral information in HS data
is highly correlated, so, to promote statistical
independence, which will be assumed in our model,
we propose a two step pre-processing stage for the
data: (1) differentiate
p0
x
and
q1
x
to yield
[]
t
)1(0010200
,,
−
−−=Δ
bppbppp
xxxx L
(p = 1, …
n
0
) and
[]
t
)1(1111211
,,
−
−−=Δ
bqqbqqq
xxxx L
(q
= 1, … n
1
), and
1
1
∑
=
Δ=Δ
k
n
i
ki
k
k
n
; and (2) apply
the following metric,
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
ΔΔ
ΔΔ
=
ki
k
t
i
ki
x
0
0
arccos
180
π
(1)
where k = 0,1; the operator || z || denotes the squared
root of z
t
z; and
t
][⋅
denotes the vector transpose
operator.
Cube B TRUTH Cube BT
Figure 2: Training cube
B
, shown as the average of five
planes, will be used to obtain cutoff thresholds for
multiple simulated realizations of testing cube
B
T
, also
shown as the average of five planes. The testing cube is
considered a challenging target background configuration
for conventional anomaly detectors because some of
background stripes’ sizes correspond to the size of the
inside window. The ground truth mask is a binary image,
where bright square rectangles representing values of 1
validate target locations. Targets labelled differently (e.g.,
T1 versus T3) have different statistical characteristics
.
Using (1), let x
0
denote the reference feature
vector, x
1
the test feature vector, and let both vectors
be distributed (~) by unknown joint distributions f
0
and f
1
, respectively, or
(x)
f
x
x
x
n 11111
~
),...,(
1
=
(2)
,
~
),...,(
00010
0
(x)
f
x
x
x
n
=
(3)
where, n
0
= n
1
in this particular implementation.
The dual window is expected to systematically
slide across the imagery and at each location will
pose this question: Do x
0
and x
1
belong to the same
population, or class, in the feature space? If the
answer is no, the test sample will be labelled as an
anomaly with respect to its surroundings at that
location. Random vectors x
0
and x
1
are inputs to the
model discussed next.
3 PROPOSED DETECTOR
We propose in this section the asymmetric variance
test (AVT) anomaly detector. Let random variables
x
0
and x
1
be observed according to the model
,
~
),...,(
11111
1
(x)
g
iid
x
x
x
n
=
(4)
,
~
),...,(
00010
0
(x)g iid
x
x
x
n
=
(5)
where, x
0
(test sample of size n
1
) and x
1
(reference
sample of size n
0
) are independent, g
1
and g
0
are
unknown, and
, ,
2
1111
∞<=
=
σ
μ
jj
xVarEx
(6)
, ,
2
0000
∞<=
=
σ
μ
jj
xVarEx
(7)
(
)
.
2
0
2
00
∞<=
−
ζ
μ
j
xVar
(8)
Now, consider the null hypothesis
()
.0 :
2
00
>=
ττσ
H
(9)
In (9), we would like to test the hypothesis that
the variance from a reference sample is equal to an
arbitrary positive value. At a first glance, the null
hypothesis does not seem too effective, as a
discriminant feature, because
τ
can take any
positive value, and additionally the variance, as a
discriminant feature, does not account for the mean,
which itself can be another discriminant feature.
However, one can cleverly incorporate the
indirect comparison approach discussed earlier to
test (9), designing in the process a rather effective
anomaly detector. A solution follows.
Let the combined sample be represented by
(
)
(
)
,,...,,,...,,...,
10
1110011 nnn
xxxxttt
=
≡
(10)
where, n = n
1
+n
2
, and lets assume that its
components have the same variance, i.e.,
(
)
∞<=
2
u
k
tVar
σ
. The last assumption may not be
satisfied for all t, but would certainly be satisfied
when x
0
and x
1
are sampled from the same
A NOVEL ASYMMETRIC VARIANCE-BASED HYPOTHESIS TEST FOR A DIFFICULT SURVEILLANCE
PROBLEM
279
population, in which case one could set
2
ˆ
u
στ
=
in
(9), where
2
ˆ
u
σ
estimates
2
u
σ
.
Denoting the symbol
>>
as much greater then,
and
≈
as approximately equal to, the implications of
setting
2
ˆ
u
στ
=
for the study cases shown in Fig. 1
are as follows:
Case 1:
Yx ∈
0
,
Yx ∈
1
, thus,
2
0
2
ˆ
σσ
≈
u
(non-
anomaly).
Case 2:
Xx ∈
0
,
Yx ∈
1
, thus,
2
0
2
ˆ
σσ
>>
u
(strong
anomaly, especially for tight distributions having
μ
0
significantly different from
μ
1
).
Case 3:
XYx ∈
0
,
Yx
∈
1
, thus,
2
0
2
ˆ
σσ
<
u
or
2
0
2
ˆ
σσ
≈
u
(softer anomaly, as the union
10
U xx
merely adds more evidence about Y, retaining the
overall characteristics of the original mixture x
0
).
Without the Normality assumption in (4) and (5),
deriving a test for the null hypothesis in (9) can be
quite difficult. But as we anticipate a relatively large
sample size in HSI, we shall rely on the central limit
theorem (CLT) (Casella, 1990) to design the new
detector.
Using the weak law of large numbers (WLLL),
see for instance (Casella, 1990), the set of
parameters
()
2
00
,
σμ
can be estimated by the
following consistent estimators:
(
)
2
00
, sx
,
respectively, where
()
.
1
,
00
1
0
2
00
2
0
1
0
0
0
∑∑
==
−
−
==
n
j
j
n
j
j
n
xx
s
n
x
x
(11)
Following (11), under general regularity
conditions and using the denotations in (4), CLT
ensures that the random variable z
1
, below,
converges in law to the standard Normal distribution
[N(0,1)], as the sample size
0
n
increases, or
).1,0(
0
2
0
22
0
01
N
s
nz
n
o
⎯⎯⎯→⎯
∞→
−
=
ζ
σ
(12)
To estimate
2
0
ζ
using a consistent estimator
(
)
2
0
ˆ
ζ
, consider this rationale: Let
()
2
00
μϑ
−=
jj
x
and note that, based on (7)
and (8),
(
)
2
0
σϑ
=
j
E
and
(
)
.
2
0
ζϑ
=
j
Var
A
consistent estimator of
(
)
j
Var
ϑ
then would
qualify for application in (12). An obvious estimator
of
(
)
j
Var
ϑ
is
()
∑
=
−
−
=
0
1
0
2
1
ˆ
n
j
j
n
V
ϑϑ
ϑ
, where
ϑ
is the sample average using all
j
ϑ
’s. Notice that
ϑ
V
ˆ
can be also expressed by the following
decomposition
(
)
()
{
}
∑
=
−−
−−−−=
0
1
2
2
0
2
2
0
1
0
1
00
)1(
ˆ
n
i
i
nnnV
σϑσϑ
ϑ
,
where the normalized summation term (which does
not include
ϑ
) tends to
2
0
ζ
in probability by the
WLLN, and the term that includes
ϑ
tends to zero
in probability also by the WLLN. Therefore,
ϑ
V
ˆ
is a
consistent estimator of
2
0
ζ
. In addition, using
results from (11), notice that
2
0
s
is also a consistent
estimator of
(
)
j
E
ϑ
. We then propose the
following consistent estimator of
(
)
[
]
2
2
0 jj
EE
ϑϑζ
−=
to be:
(
)
[
]
.
1
0
1
0
2
2
0
2
00
2
0
ˆ
∑
=
−
−−
=
n
j
j
n
sxx
ζ
(13)
Setting
2
ˆ
u
στ
=
in (9), where
(
)
, , ,
1
ˆ
10
11
2
2
nnn
n
t
t
n
tt
n
j
j
n
j
j
u
+==
−
−
=
∑∑
==
σ
(14)
if the null hypothesis in (9) is true, the following
must also be true
).1,0(
ˆ
ˆ
0
2
0
22
0
02
N
s
nz
n
u
⎯⎯⎯→⎯
∞→
−
=
ζ
σ
(15)
Using properties of the family of chi square
distributions [see, for instance, (Casella, 1990)], the
following are also true under the null hypothesis:
(
)
,
2
1
2
0
2
22
0
0
2
2
0
ˆ
ˆ
χ
ζ
σ
⎯⎯⎯→⎯
∞→
−
==
n
u
AVT
s
nzZ
(16)
where
2
1
χ
is the chi-square probability density
function (pdf) with 1 degree of freedom (dof).
Testing hypothesis H
0
in (9) using (16)
constitutes the AVT anomaly detector. A decision
threshold T can be determined via
∫
∞
=
T
dww ,)(
2
1
αχ
where
α
is the type I error (i.e., the probability of
rejecting H
0
, given that H
0
is true). The user chooses
α
, and for values of Z
AVT
greater then T, hypothesis
H
0
is rejected implying that x
0
and x
1
are most likely
sampled from different populations; hence, they are
VISAPP 2006 - IMAGE ANALYSIS
280

anomalous to each other. Otherwise, they are not
significantly anomalous to each other.
4 ALTERNATIVE APPROACHES
A few comments are made in this section on five
well known alternative techniques, which shall be
used in this paper for comparison purposes. Their
mathematical representations are briefly described
and their references are made to the reader. The
alternative techniques are known as: RX (reed-
xiaoli), DPC (dominant principal component), EST
(eigen separation transform), FLD (Fisher’s linear
discriminant), and ANOVA (analysis of variance).
The RX technique (Yu, 1997), the industry
standard, is based on the generalized likelihood ratio
test and on the assumption that the population
distribution family of both test and reference
samples are multivariate normal. The FLD technique
(Kwon, 2003) is also based on the same assumption,
but differs in its subtleties in answering the question
whether the test and reference samples are drawn
from the same normal distribution. The FLD
technique promotes separation between classes and
variance reduction within each class. The DPC and
EST techniques (Kwon, 2003) are both based on the
same basic idea, i.e., data are projected from their
original high dimensional space onto a significantly
lower dimensional space using a criterion that
promotes highest sample variability within each
domain in this lower dimensional space. Differences
between DPC and EST can be appreciated through
their mathematical representations.
Four of these techniques use multivariate vector
samples as inputs, see Fig. 2 (top). These detectors
are defined as:
()()
outin
1
out
t
outin
xxCxx −−=
−
R
X
Z
, (17)
()
outin
t
in
xxE −=
P
CA
Z
, (18)
()
outin
t
ΔC
xxE −=
E
ST
Z
, (19)
and
(
)
outin
t
/SS
xxE
wb
−=
FLD
Z
, (20)
where
in
x
is a sample mean vector from a set of
inside-window vectors
(i)
in
x
, each having b spectral
bands;
out
x
is similar but sampled from the outside
window
(i)
out
x
;
1
out
C
−
is the inverse sample covariance
using all vectors sampled from the outside window;
t
in
E
is the highest energy eigenvector of the
eigenvector decomposition of the inside-window
covariance;
t
ΔC
E
is the highest positive energy
eigenvector of the eigenvector decomposition of the
covariance difference (inside-widow minus outside-
widow); and
t
wb
/SS
E
is the eigenvector
decomposition of the scatter matrices ratio
1
WB
SS
−
,
where
,))((
))((
1
)()(
1
)()(
∑
∑
=
=
−−
+−−=
out
in
n
i
t
out
i
out
i
n
i
t
in
i
in
i
xxxx
xxxxS
outout
ininW
(21)
and
,))((
))((
1
)()(
1
)()(
∑
∑
=
=
−−
+−−=
out
in
n
i
tii
n
i
tii
totalouttotalout
totalintotalinB
xxxx
xxxxS
(22)
where
total
x
is the sample average vector using all of
the samples from the inside and outside windows,
and n
in
and n
out
are the sample size of the inside and
outside windows, respectively. For additional details
on these detectors, see (Kwon, 2003).
Our interest in having a well known method
operating in the same feature space of the new
detector’s feature space motivated us to adapt the
ANOVA method into anomaly detection. In the
context of our discussion, using sequences (4) and
(5) as inputs, the ANOVA detector is defined as
()
2
1
0
2
0
S
xxn
Z
i
i
ANOVA
∑
=
−
=
(23)
where,
i
x
(i = 0, 1) are the sample means of (4) and
(5), also from (4) and (5)
∑∑
==
=
1
01
i
n
j
i
ij
i
n
x
x
, (24)
and using a version of (11) for x
1
, the pooled
variance can be defined as
)1()1(
)1()1(
00
2
00
2
10
2
−+−
−+−
=
nn
snsn
S
. (25)
To the best of our knowledge, the ANOVA
method was never applied to the problem in context.
A NOVEL ASYMMETRIC VARIANCE-BASED HYPOTHESIS TEST FOR A DIFFICULT SURVEILLANCE
PROBLEM
281
5 COMPARATIVE RESULTS
In this section we describe the implementation and
results for two experiment types, one using
simulated multivariate data and another using real
hyperspectral data.
5.1 Simulated Multivariate Data
Let a background
B
consist of six classes
54321
,,,, CCCCC
and
6
C
, and be constructed
using highly correlated, normally distributed
multivariate samples, as follows
() () ()
() () ()
,,~ ,,~ ,,~
,,~ ,,~ ,,~
665544
332211
ΣΣΣ
Σ
ΣΣ
μμμ
μ
μ
μ
NCNCNC
NCNCNC
(26)
where, “~” denotes “is distributed as,” and the
parameters in (26) are specified as
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=Σ
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
0000.101421.140000.201421.140000.10
1421.140000.202843.280000.201421.14
0000.202843.280000.402843.280000.20
1421.140000.202843.280000.201421.14
000.101421.140000.201421.140000.
10
;
650
660
720
640
630
1
μ
and
300
12
−=
μ
μ
,
780
13
−
=
μ
μ
,
1400
14
+=
μ
μ
, 800
15
−=
μ
μ
, and
2000
36
+=
μ
μ
.
Background configuration
B
was constructed to
form a total volume of 256 x 256 x 5 using
simulated realizations of the six classes, as shown in
Fig 2 (bottom). The column widths of narrow stripes
in
B
were chosen to match the column width of W
in
(inside window), see Fig. 2. For targets, five
different multivariate random variables were
specified,
,4,3,2,1 TTTT
and
5T
; they were
specified as follows:
() () ()
() ()
,,~5 ,,~4
,,~3 ,,~2 ,,~1
54
321
ΞΞ
Ξ
Ξ
Ξ
ττ
τ
τ
τ
NTNT
NTNTNT
(27)
where,
600
11
−=
μ
τ
,
2000
12
+=
τ
τ
,
2050
13
+=
τ
τ
, 50
14
+=
τ
τ
,
100
15
+
=
τ
τ
,
and, for simplicity, the correlations imbedded in
Ξ
were all equal to 1, and the variances were all equal
to 100. Targets were constructed to form sub-
volumes of constant space size 9 x 9 x 5 using
simulated realizations as specified in the third
dimension. Samples of
B
T cube were formed by
simulating realizations of
B
and adding (9 x 9 x 5)
subcubes of simulated realizations of
,4,3,2,1 TTTT
and
5T
, as shown in Fig. 2.
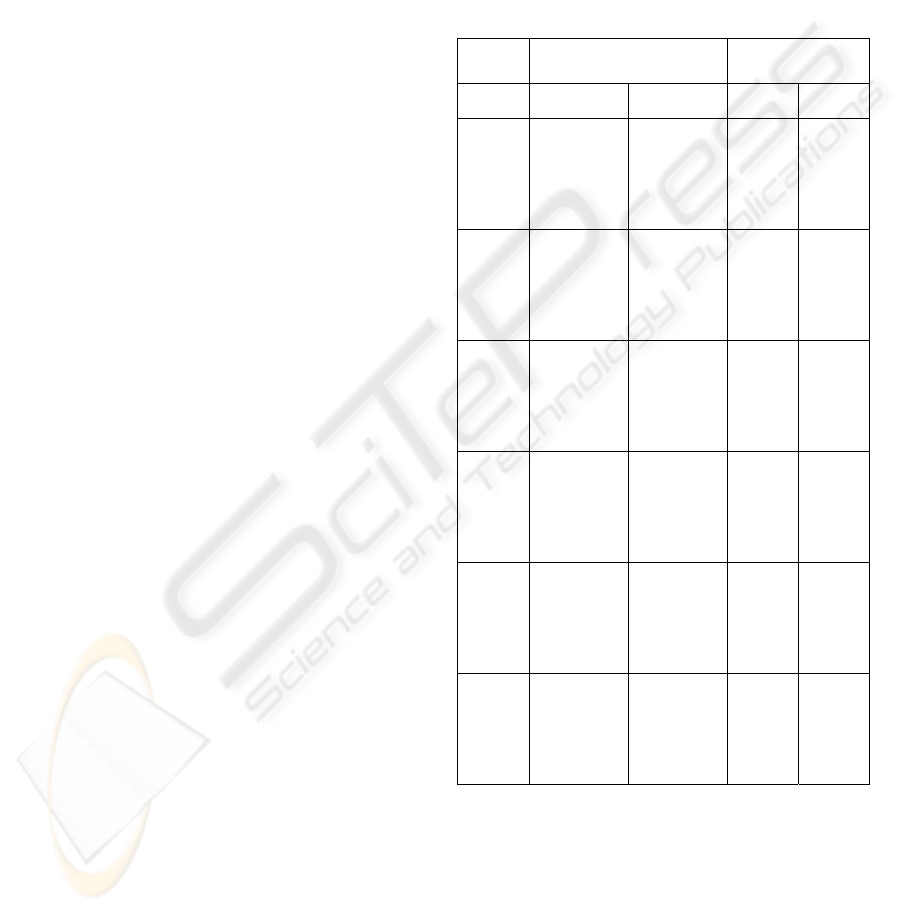
Details on the information presented in Table 1
and Fig. 3 are discussed next. In order to estimate
type I and type II errors, a 2 dimensional (2D) mask
was required to validate the spatial location of
targets in the simulated imagery. This mask is binary
and often referred to in the target community as
ground truth, see Fig. 2.
Table 1: Confidence Intervals (95% CI).
Alg Type I Error
95% CI
1.0 – Type II
Error 95% CI
LB UB LB UB
AVT
0.111715
0.011173
0.001400
0.000802
0.000788
0.112103
0.011399
0.001496
0.000817
0.000794
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
RX
0.101381
0.009608
0.000851
0.000921
0.000074
0.101805
0.009831
0.000861
0.000923
0.000079
1.000
1.000
0.700
0.500
0.500
1.000
1.000
0.700
0.500
0.500
FLD
0.101444
0.010374
0.001120
0.000072
0.000019
0.101535
0.010522
0.001279
0.000112
0.000042
0.667
0.500
0.500
0.500
0.500
0.667
0.500
0.500
0.500
0.500
Anova
0.100254
0.009011
0.000978
0.000077
0.000032
0.103467
0.009827
0.001151
0.000107
0.000050
1.000
0.500
0.500
0.500
0.500
1.000
0.500
0.500
0.500
0.500
EST
0.101303
0.010374
0.001120
0.000072
0.000019
0.101394
0.010522
0.001279
0.000112
0.000042
0.700
0.300
0.300
0.300
0.300
0.700
0.300
0.300
0.300
0.300
DPC
0.101444
0.010374
0.001120
0.000072
0.000019
0.101535
0.010522
0.001279
0.000112
0.000042
0.667
0.500
0.500
0.500
0.500
0.667
0.500
0.500
0.500
0.500
In a nutshell, a detector tests a simulated cube
producing a 2D output surface of real values. A
detector-corresponding cutoff threshold, which is
based on a specified type I error and which is
relevant to the cube’s background excluding targets,
is applied to that surface, such that, pixel values that
are above the threshold and which fall within target
regions, as validated through a corresponding
ground truth mask, are considered a correct target
VISAPP 2006 - IMAGE ANALYSIS
282
detection; otherwise, they are considered a false
detection. These measures can be converted into
type I and type II errors by estimating the probability
of correct target detection, which is equivalent to 1
minus type II error, and by estimating the probability
of false detections, which is equivalent to type I
error.
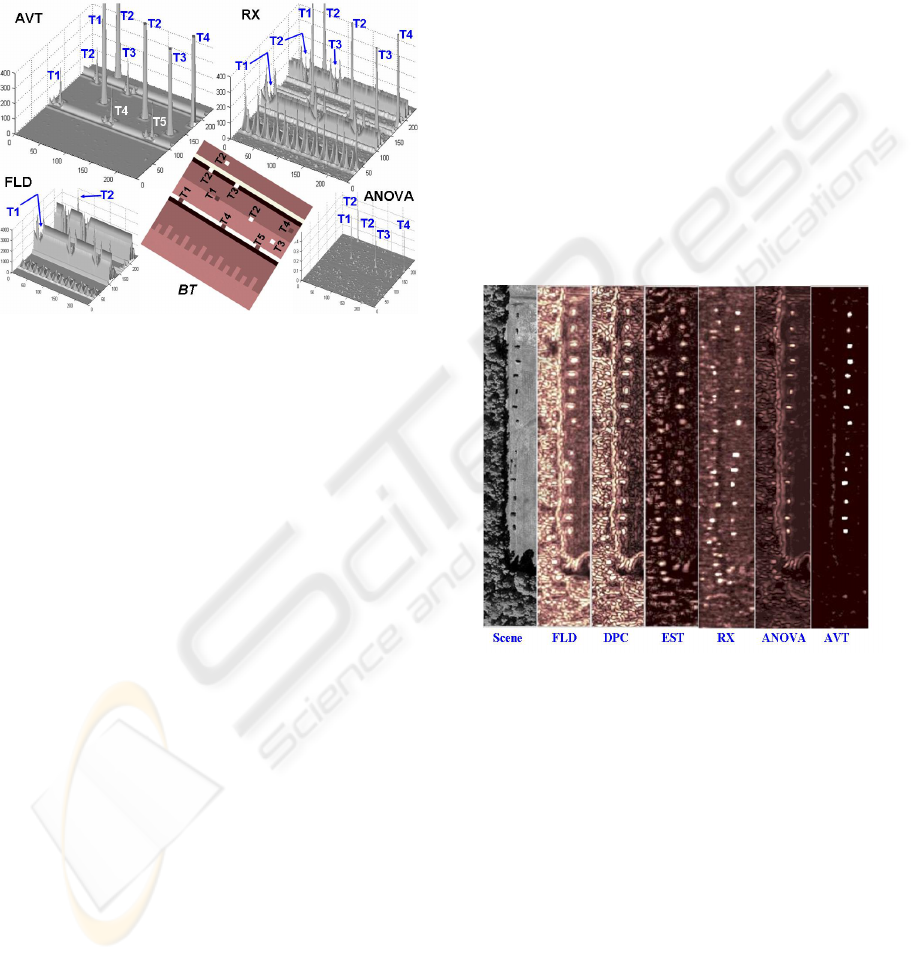
Figure 3: Examples of output surfaces (3D view).
A single simulated realization of the background
configurations
B
was used to obtain cutoff
thresholds based on the following set of desired
Type I errors:
(
)
.10 ,10 ,10 ,10 ,10
54321 −−−−−
=
α
(28)
Type I errors were estimated for each detector
using their corresponding sets of cutoff thresholds
on their output surfaces after testing each detector on
M = 1500 simulated realizations of
B
T .
A generic null hypothesis
0
H
can be stated for
this simulation as follows: At any given location in a
simulated cube, samples observed in
in
W
belong to
the same class of samples observed in
out
W
. The
lower bound (LB) and upper bound (UB) confidence
intervals (CI) are sown in Table 1.
In order to gain a better appreciation for the
differences in performance among different
detectors, see examples output surfaces (3D viewing
perspective) shown in Fig. 3
5.2 Real Hyperspectral Data
Data from the well known Hyperspectral Digital
Imagery Collection Experiment (HYDICE) sensor—
a U.S. Air Force Sensor—were used to compare the
anomaly detectors in this paper. The imagery used is
from the so-called Forest Radiance I (FR-I) dataset
and the spectral average (from 150 bands) of the
sub-cube in reference are shown in Fig. 2 (far left),
as a two dimensional (2D) image. In FR-I, 14
stationary motor vehicles can be observed on sparse
grasses, near a forest in Aberdeen, Maryland, U.S.
The vehicles in FR-I are considered the targets in
this dataset.
Effective local anomaly detectors are expected to
accentuate objects in the scene that are significantly
anomalous to their immediate surroundings and to
suppress noise. Noise in this context also includes
strong responses due to a major transition in local
regions (e.g., grass and shadow).
Examples of 2D output surfaces are shown in
Fig. 4 for the six detectors on HYDICE FR-I data.
These surfaces are displayed in Fig. 4 using the
same colormap (false color), where stronger
intensities depict stronger evidences of local
anomalies.
Figure 4: Decision surfaces for the HYDICE FR-I data,
forest radiance. The intensity of local peaks reflects the
strength of anomaly evidences as seen by different
detectors
.
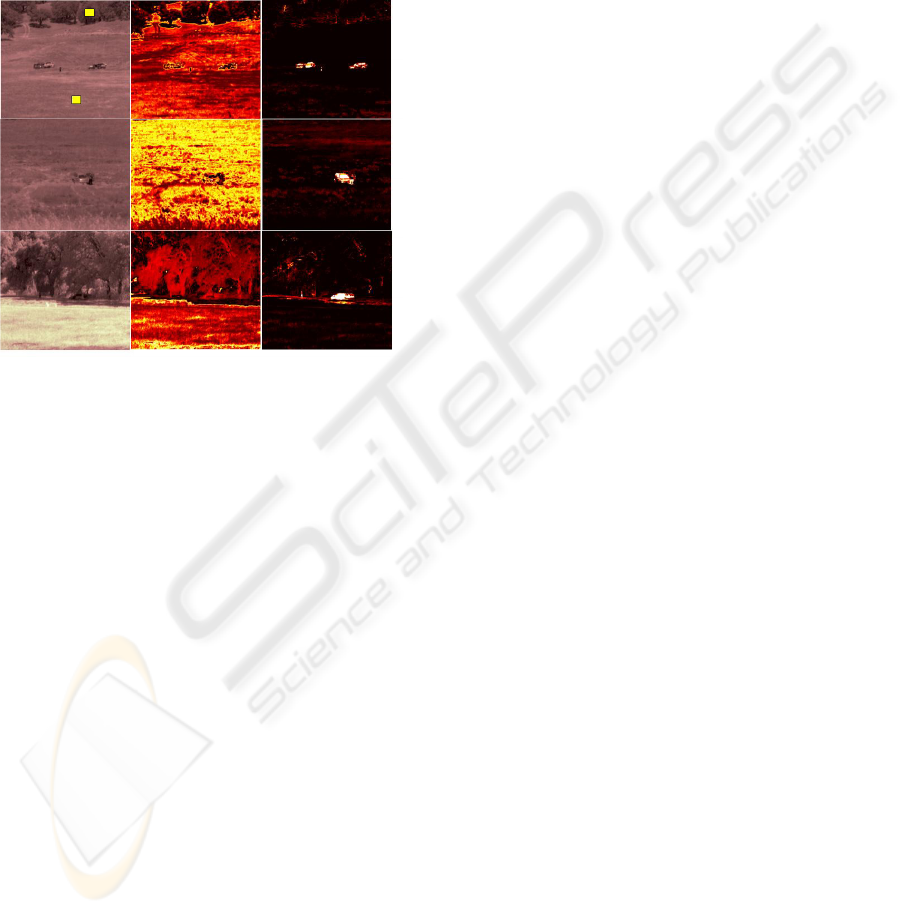
Fig. 5 presents output surfaces of the industry
standard RX detector and the new AVT detector, as
both these detectors are applied to a difficult
surveillance problem: Ground to Ground (GG)
anomaly detection. The difficulty with this problem
is that, since both a potential target and the viewing
sensor are found approximately at the same ground
elevation, the range between targets and sensor are
unknown, which means that targets’ sizes are
unknown. Additionally, targets may be found in
concealment, e.g., targets in tree shadows.
To handle the GG detection difficulty, the outside
window was eliminated, and two spectral sample
A NOVEL ASYMMETRIC VARIANCE-BASED HYPOTHESIS TEST FOR A DIFFICULT SURVEILLANCE
PROBLEM
283
sets (see square boxes in Fig. 5, top scene) were
made available to the detectors to represent samples
viewed by the outside window. (Notice that in the
GG problem the outside samples are fixed, while the
inside samples will change from location to location,
as the inside window slides across the imagery).
This is a contrast to the high altitude problem
discussed earlier.
SCENES RX AVT
Figure 5. Ground to ground anomaly detection.
The criteria for selecting the fixed outside samples
were based on the abundance level of particular
types of background objects, e.g., in those scenes
shown in Fig. 5, the two most dominant (abundant)
objects in their background are general terrain and
tree leaves, see Fig. 5. The first scene (column 1,
top, in Fig. 5) has two ground vehicles and a person
between these vehicles. The second scene (column
1, center) has a ground vehicle and a person in its
vicinity. The third scene (column 1, bottom) has a
person and a ground vehicle in tree shadows.
So, for a given detector, a set of 100 spectral
samples of terrain and another of tree leaves were
presented as sample references R1 and R2, as they
will be compared to samples W viewed by the inside
window at a give location (i,j) in the imagery.
Denote OUTPUT(i,j) the final output result for this
detector at location (i,j), such that OUTPUT(i,j) is
equal to the minimum between D1 and D2, where
D1 is the detector’s testing result between R1 and W,
and D2 is the detector’s testing results between R2
and W. The OUTPUT surface for the RX and AVT
detectors are shown in Fig. 5, as these detectors
tested the scenes shown in the first column. The
output surfaces show that the AVT anomaly detector
can suppress the background and accentuate the
presence of the ground vehicles and the person in
those scenes, while the industry standard anomaly
detector can not.
6 CONCLUDING REMARKS
We have presented a new local anomaly detector for
hyperspectral sensor imagery. The new detector
(AVT) exploits a notion of indirect comparison
between two sets of samples and yields an
asymptotic behavior, under the null hypothesis, of
the chi-square distribution with 1 degree of freedom.
The AVT detector is simple to implement and has
shown to be very effective accentuating meaningful
local anomalies, while suppressing meaningless
local anomalies in challenging scenes. Results from
this paper elevate the role of anomaly detection from
mere screening (a low impact practical value) to an
effective focus of attention (a high impact practical
value).
REFERENCES
Casella, G., R. L. Berger, 1990. Statistical Inference.
Duxbury Press. Belmont, CA.
Manolakis, D., G. Shaw, 2002. Detection algorithms for
hyperspectral imaging applications. In IEEE Signal
Processing Magazine, pp 29. IEEE Press.
Kwon H., S.Z. Der, and N.M. Nasrabadi, 2003. Adaptive
anomaly detection using subspace separation for
hyperspectral imgery, Opt. Eng., v. 42 (11), pp. 3342-
3351. OE Press.
Schowengerdt, R., 1997. Remote Sensing, Models and
Methods for Image Processing, Academic. San Diego,
2
nd
edition.
Schweizer, S., J. M. F. Moura, 2000. Hyperspectral
Imagery: Clutter Adaptation in Anomaly Detection. In
IEEE Trans. Information Theory, vol. 46, no. 5, pp.
1855-1871. IEEE Press.
Yu, X., L. Hoff, I. Reed, a. Chen, L. Stotts, 1997.
Automatic target detection and recognition in
multiband imagery. In IEEE Tran. Image Processing,
vol. 6, pp. 143-156. IEEE Press
.
VISAPP 2006 - IMAGE ANALYSIS
284
