
REALISTIC SIMULATION OF OCEAN SURFACE
USING WAVE SPECTRA
Jocelyn Fr
´
echot
LaBRI - Laboratoire bordelais de recherche en informatique
Domaine universitaire, 351 cours de la Lib
´
eration, 33405 Talence CEDEX, France
Keywords:
Natural phenomena, realistic ocean waves, procedural animation, parametric energy spectra.
Abstract:
We present a method to simulate ocean surfaces away from the coast, with correct statistical wave height and
direction distributions. By using classical oceanographic parametric wave spectra, our results fit real world
measurements, without depending on them. Since wave spectra are independent of the ocean model, Gerstner
parametric equations and Fourier transform method can be used with them. Moreover, since they are simple to
use and need very few parameters, they allow easy production of ocean surface animations usable in movies
and games. We explain how to accurately sample them, to achieve oceanic waves in deep water according to
given wind parameters, in a realistic way.
1 INTRODUCTION
The reproductions of many natural phenomena is still
an open problem in Computer Graphics. In particular,
the realistic simulation of oceanic surfaces continues
to be of great interest. Many fields of activity rely on
it: virtual reality, movies and games, but also sailing
(Cieutat et al., 2001) and oceanographic simulations,
among others.
While beautiful pictures and animations such as
wave refraction (Gonzato and le Sa
¨
ec, 2000) (Gamito
and Musgrave, 2002) are produced, there is still a
need for oceanic scenes with realistic wave features.
Models based on fluid mechanics equations (Enright
et al., 2002) (Mihalef et al., 2004) should give the
more realistic results, but are inadequate for large
oceanic surfaces.
For twenty years, procedural models for wave rep-
resentation in Computer Graphics have been devel-
oped and improved (Iglesias, 2004). The Gerst-
ner parametric equations and their Fourier transform
rewriting are well known by the oceanographic com-
munity. Based on the linear wave theory, they allow
representation of natural wave shapes and moves in
deep water above the capillary size. As they not de-
scribe any net mass transport, they are limited to non-
breaking waves and to scenes without violent storms.
Wave height measurement data allow to simulate a
given sea state. In the more general case, oceanic sur-
face statistics are taken in account by the use of para-
metric wave spectra. For given wind parameters, they
indicate the distribution of wave energy as a function
of frequency. However, none of the existing methods
are able to correctly reproduce sea states described by
these spectra.
In this paper, we explain how wave spectra are
related to oceanic surface energy and we detail a
method to deduce wave heights from it. We propose
a solution for optimal spectrum sampling, suitable
for parametric and Fourier transform models. This
method enables the accurate simulation of oceanic
surface. Users can easily produce realistic wave ani-
mations, with respect to supplied weather conditions.
The structure of this paper is as follows. Section 2
summarizes ocean models for Computer Graphics. In
section 3, we detail our method and give classical
parametric spectrum examples. We handle wave sta-
tistics in section 4. We discuss our results in section 5,
and conclude in section 6.
2 OCEAN MODELS
2.1 Definitions and Relationships
The surface elevation, η, is the vertical displacement
from the mean water level of the oceanic surface at
given point and time. The wave amplitude, a, is the
maximum surface elevation due to this wave. The
wave height, H, is the vertical distance between a
trough and an adjacent crest. For a single wave,
76
Fréchot J. (2006).
REALISTIC SIMULATION OF OCEAN SURFACE USING WAVE SPECTRA.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 76-83
DOI: 10.5220/0001357800760083
Copyright
c
SciTePress
H =2a. The wavelength, λ, is the distance between
two successive crests. The period, T , is the time inter-
val between the passage of successive crests through
a fixed point. The frequency, f =1/T , is the number
of crests that pass a fixed point in 1 second. The wave
speed or phase speed, c = λ/T , is the speed of wave
crests or troughs. It can also be expressed as c = ω/κ,
where ω =2πf is the angular velocity or angular fre-
quency, and κ =2π/λ is the wavenumber. The water
depth, d, is the vertical distance between the floor and
the mean water level.
The concept of deep water is wave dependent and
is related to the ratio of the water depth to the wave-
length of the wave. This comes from the transcenden-
tal expression
λ =
gT
2
2π
tanh
2πd
λ
, (1)
where g ≈ 9.807 m·s
−2
is the standard acceleration
of gravity. Since tanh(x) ≈ 1 when x>π, and
tanh(x) ≈ x when x<π/10, water is considered
deep if d/λ > 1/2 and shallow if d/λ > 1/20. This
leads to some simplifications in the expressions of the
terms given above (see table 1).
Table 1: Relations between oceanographic terms. The sub-
script ∞ indicates a deep water term.
Transitional depth: Deep water:
1/20 <d/λ<1/2
d/λ > 1/2
c =
λ
T
=
ω
κ
c =
gT
2π
tanh(κd) c
∞
=
gT
2π
c
2
=
g
κ
tanh(κd) c
2
∞
=
g
κ
=(
g
ω
)
2
κ =
2π
λ
κ
∞
= κ tanh(κd)
λ =
2π
κ
= cT
λ =
gT
2
2π
tanh(
2πd
λ
) λ
∞
=
gT
2
2π
λ = λ
∞
tanh(κd)
ω =
2π
T
= κc
ω
2
= gκ tanh(κd)=gκ
∞
ω
2
∞
= gκ
2.2 Parametric Equations
The base model for ocean waves simulation comes
from the linear (or small-amplitude) wave theory by
(Airy, 1845), widely used in oceanic engineering, and
in Computer Graphics by (Peachey, 1986). It de-
scribes waves with a sinusoidal shape, which corre-
sponds to calm weather conditions. Considering a lo-
cation x
0
lying on a 1D surface at rest, the elevation
z = η at time t due to a wave with wavenumber κ,
amplitude a and angular velocity ω =
√
gκ is
z(x
0
,t)=a cos(κx
0
− ωt). (2)
When the steepness of the wave increases, its crests
become sharper and its troughs flatter. Therefore,
(Fournier and Reeves, 1986) used a more realistic de-
scription based on trochoids, made by (von Gerstner,
1804) and by (Rankine, 1863). The surface equation
is now
x(x
0
,t)=x
0
+ a sin(κx
0
− ωt)
z(x
0
,t)=z
0
− a cos(κx
0
− ωt),
(3)
where z
0
is the surface elevation at rest (typically 0).
Note that the important point here is the phase term
difference of −π/2 between x(x
0
,t) and z(x
0
,t), not
the use of a particular sine or cosine function. This
Lagrangian model describes the trajectory in a ver-
tical plane of a particle (x, z) around its position at
rest (x
0
,z
0
). Summing several waves and extending
equation 3 to a 2D surface gives
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
x(x
0
,t)=
x
0
+
κ
ˆ
κa(κ)sin(κ · x
0
− ω(κ)t + φ(κ))
z(x
0
,t)=
z
0
−
κ
a(κ)cos(κ · x
0
− ω(κ)t + φ(κ)),
(4)
where x =(x, y) is the horizontal particle position at
time t, x
0
=(x
0
,y
0
) its position at rest, κ =(κ
x
,κ
y
)
a wave vector, i.e. a vector with magnitude κ =
κ and direction of the considered wave propagation
and
ˆ
κ = κ/κ is the unit vector of κ. Because of
the presence of uniformly distributed random phase
terms, φ(κ) ∈ [0, 2π[, this model is also known as
random waves. Any set of x
0
can be taken, which
allows the use of adaptive mesh, for optimal surface
sampling (Hinsinger et al., 2002).
2.3 Inverse Fourier Transform
Another method for computing equation 4 is the 2D
inverse discrete Fourier transform, used by (Mastin
et al., 1987), (Premo
ˇ
ze and Ashikhmin, 2001) and
(Tessendorf, 2001). The set of N ×M complex num-
bers F
n,m
is transformed into a set of complex num-
bers f
p,q
by
f
p,q
=
N
n=1
M
m=1
F
n,m
exp
i2π
np
N
+
mq
M
, (5)
where p ∈{1, .., N} and q ∈{1, .., M }. This is
of particular interest because the fast Fourier trans-
form (FFT) algorithm is an efficient way to compute
REALISTIC SIMULATION OF OCEAN SURFACE USING WAVE SPECTRA
77

these sum. However, in comparison with the previous
method, its usage is more restrictive. The set of x
0
is
defined as a regular grid of N ×M points with dimen-
sions L
x
×L
y
and origin at the center, such that x
0
=
(n
x
0
L
x
/N, m
y
0
L
y
/M ), where n
x
0
∈ [−N/2,N/2[
and m
x
0
∈ [−M/2,M/2[ are integers. We rewrite
equation 4 as
⎧
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎩
x(x
0
,t)=x
0
+
κ
ˆ
κA(κ, t)exp(iκ · x
0
)
z(x
0
,t)=z
0
−
κ
A(κ, t)exp(iκ · x
0
)
,
(6)
where () and () correspond, respectively, to the
imaginary part and real part of the expression, and
A(κ, t)=a(κ)exp(i(−ω(κ)t + φ(κ))). (7)
Rather than the random phase term φ, authors com-
monly use a normally distributed random amplitude
(see section 4). To comply with equation 5, the set of
wave vectors must be
κ =(2π
n
κ
L
x
, 2π
m
κ
L
y
), (8)
where n
κ
and m
κ
are defined as n
x
0
and m
x
0
above.
The resulting surface is periodic in all directions and
can be used as a tile (Tessendorf, 2001).
To decrease the FFT computation time by a fac-
tor two, real numbers can be used instead of com-
plex ones. This is achieved by adding two waves with
same amplitude and travelling in opposite directions
(Tessendorf, 2001). Equation 7 becomes
A(κ, t)=a(κ)exp(i(−ω(κ)t + φ(κ)))
+ a(κ)exp(−i(−ω(κ)t + φ(κ)))
=2a(κ)cos(−ω(κ)t + φ(κ)).
(9)
This results in a single stationary wave with time de-
pendent amplitude. This phenomenon is known as
standing wave. The drawback of this method is that
the generated surface is only half the size of the ex-
pected one. The second half is obtained with a rota-
tion of the first one by 180 degrees around the origin,
leading to pattern duplications.
3 WAVE SPECTRA
To be able to use the models discussed so far, we
need a function a(κ). For the parametric model, we
also need to know which set of wave vectors char-
acterizes the surface we want to generate. The more
natural method is to use records of surface elevation
measurement data used by oceanic engineering (Thon
and Ghazanfarpour, 2002). Measurements are made
with accelerometers mounted on buoys, satellite al-
timeters, high frequency radars and others techniques.
A spectral analysis of the collected data is done using
the Fourier transform from time domain to frequency
domain. This decomposition of the surface elevation
gives a histogram of wave frequencies ω, with corre-
sponding amplitudes and possibly directions, known
as frequency amplitude spectrum. The same analysis
method can be used with oceanic surface photographs
(Tessendorf, 2001) (Thon and Ghazanfarpour, 2002).
An amplitude spectrum can be used to generate a
surface with the same characteristics as the related
one. However, to get several oceanic surfaces with
different sea states, as many spectra are needed. In-
stead, we rely on parametric wave spectra, which can
fit any environment conditions, like wind speed and
fetch.
3.1 Wave Energy and Amplitudes
Oceanographers are mostly concerned by wave en-
ergy rather than amplitude. For this purpose, they
use another type of spectrum, S(ω), called wave fre-
quency energy spectrum or wave spectrum, which
gives information about wave energy distribution as a
continuous function of frequency. This is a smoothed
version of a modified amplitude spectrum (see be-
low). Directional informations are taken into account
with a directional wave spectrum:
E(ω, θ)=S(ω)D(ω,θ), (10)
where θ is the direction of the wave and D(ω,θ) is a
directional spreading function, defined such that
+π
−π
E(ω, θ)dθ = S(ω) (11)
for all values of ω. The Pierson-Moskowitz paramet-
ric wave spectrum (see section 3.2) has been regularly
used in the field of Computer Graphics since (Mastin
et al., 1987) as a direct evaluation of wave amplitudes.
But this method cannot reflect statistical characteris-
tics of the oceanic surface. First, this is a continuous
function, so it needs to be integrated to be used with a
discrete model. Second, wave spectrum does not give
direct information about wave amplitude but energy.
The mean energy per unit surface area is E =
ρg var(η), where ρ is the water density and var(η) the
variance of the surface elevation. The wave spectrum
is defined to be related to the surface energy by
var(η)=
+∞
0
S(ω)dω. (12)
For a zero mean process, like the sinusoidal wave
model from equation 2, the variance is
var(x)=x
2
rms
, (13)
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
78
where x
rms
is the root mean square of the values. For
a general process, this becomes x
2
rms
−¯x
2
. The mean
amplitude of the trochoidal wave model from equa-
tion 3 is ¯a = −(κa
2
)/2, which can be reasonably ne-
glected in most cases for practical purposes. So, we
apply equation 13 to this model as well for simplic-
ity. The rms of a sinusoidal or trochoidal wave with
amplitude a is
a
2
rms
=
a
2
2
. (14)
As we see the oceanic surface as the sum of many
waves with independent random phases, the total vari-
ance of the surface elevation is the sum of the variance
of each wave. So, taking a finite range of frequen-
cies [ω
min
,ω
max
] such that it is representative of the
whole energy, i.e.
ω
max
ω
min
S(ω)dω ≈
+∞
0
S(ω)dω, (15)
we divide it in N samples of width ∆ω
n
and tag the
mean frequency of each of them as ω
n
to get the rela-
tion
var(η)=
N
n=1
var(a(ω
n
)) =
N
n=1
a(ω
n
)
2
2
. (16)
Regarding equations 12 and 15, this is rewritten as
var(η)=
ω
max
ω
min
S(ω)dω =
N
n=1
∆ω
n
S(ω)dω,
(17)
and so we found the amplitude of each wave with
a(ω
n
)
2
=2
∆ω
n
S(ω)dω ≈ 2 S(ω
n
)∆ω
n
. (18)
To take into account the direction of the wave, we
sample the whole directional spectrum E(ω, θ):
a(ω
n
,θ
n
)
2
=2
∆ω
n
∆θ
n
E(ω, θ)dθ dω. (19)
So, for each wave with angular frequency ω and direc-
tion θ, we can now compute the corresponding ampli-
tude a(ω, θ).
3.2 Parametric Spectra
Parametric spectrum models are empirical expres-
sions with user defined parameters that have been
found to fit ocean surface elevation measurements.
Most common parameters include wind speed and di-
rection and fetch. They are useful to simulate realistic
ocean waves without measurement data, but can also
be altered to fit specific data.
The base of modern parametric wave spectrum was
found by (Phillips, 1957) and has the form
S
P
(ω)=
αg
2
ω
5
, (20)
where α =0.0081 is called the Phillips constant.
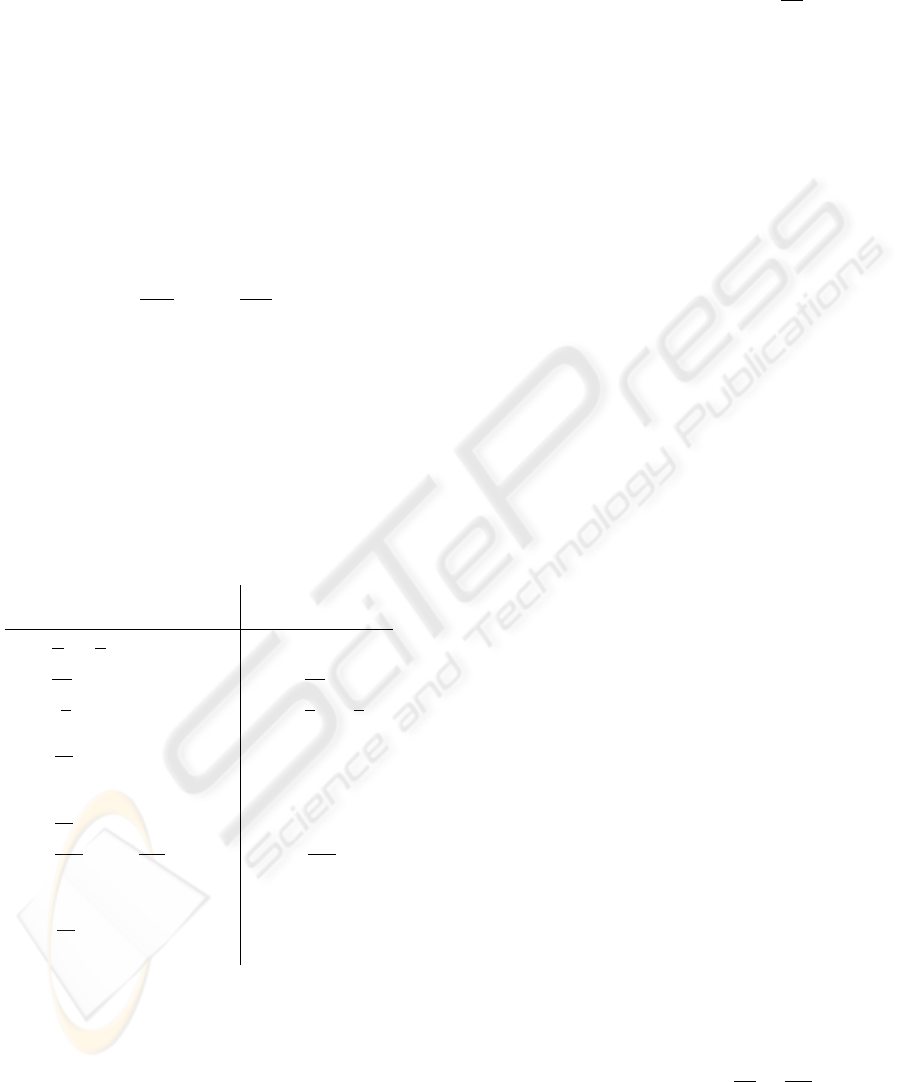
Taking into account wind speed, (Pierson and Mos-
kowitz, 1964) found an expression that describes a
theoretical fully developed sea with infinite fetch (see
figure 1). The wind has blown with no change over
a large area for several hours, and waves growth is
almost null. The spectrum is
S
PM
(ω)=S
P
(ω)exp
−
5
4
ω
p
ω
4
, (21)
where ω
p
is the frequency of the peak of the spectrum,
i.e. dS
PM
/dω =0for ω
p
. Usual value for ω
p
is
ω
p
=
0.855g
U
10
,
where U
10
is the wind speed at a height of 10 meters
above the sea surface.
0
4
8
12
16
0 0.2 0.4 0.6 0.8 1 1.2
variance (m
2
·s)
frequency (rad·s
−1
)
10.0 m·s
−1
12.5 m·s
−1
15.0 m·s
−1
17.5 m·s
−1
20.0 m·s
−1
Figure 1: Pierson-Moskowitz frequency spectrum S
PM
(ω)
with different wind speed values U
10
.
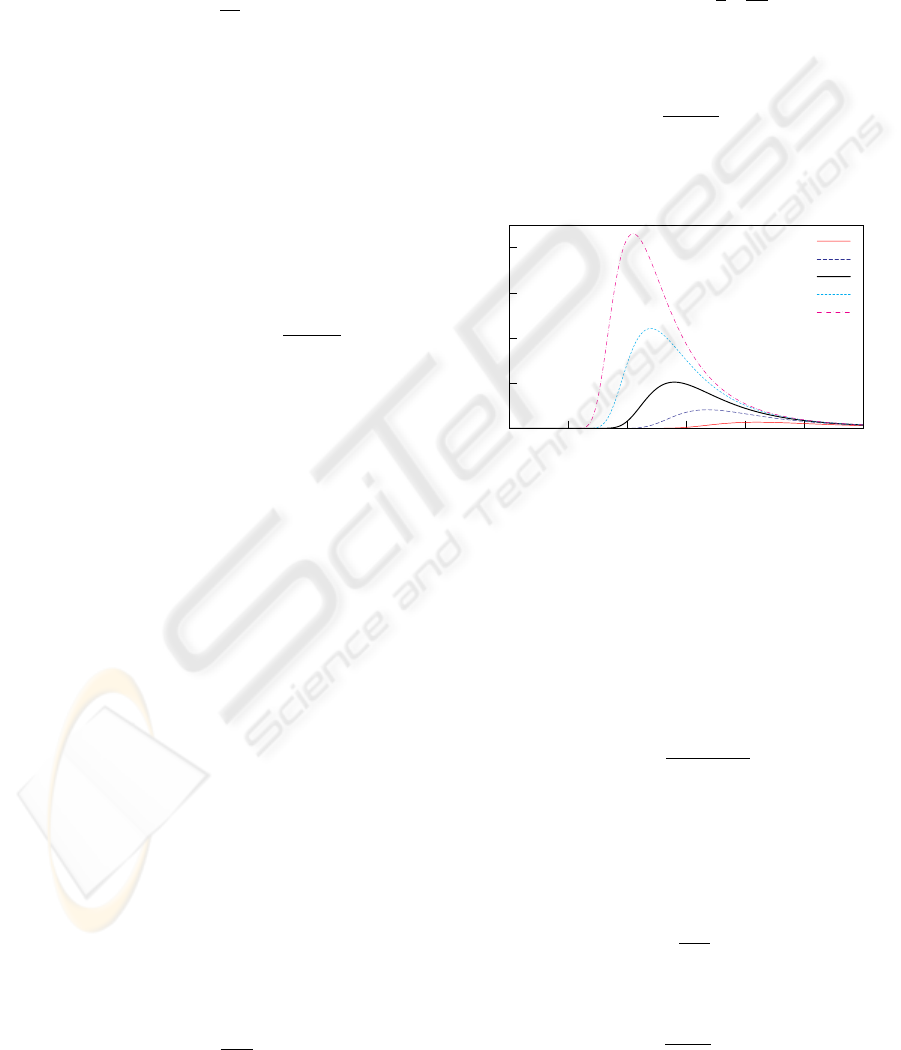
For a fetch limited sea, where waves continue to
grow, the JONSWAP spectrum has been found by
(Hasselmann and al., 1973) to be more appropriate
(figure 2). This is the previous spectrum with an ad-
ditional term:
S
J
(ω)=S
PM
(ω)γ
r
, (22)
with
r =exp
−
(ω − ω
p
)
2
2σ
2
ω
2
p
.
Here, γ is a peak enhancement factor, i.e. when same
values are used for α and ω
p
in both spectra, we get
γ = S
J
(ω
p
)/S
PM
(ω
p
). The parameter σ controls
the width of the peak. Usual parameter values for this
spectrum are
α =0.076
U
2
10
Fg
0.22
,
where F is the fetch in meters,
ω
p
=22
g
2
U
10
F
1/3
,
REALISTIC SIMULATION OF OCEAN SURFACE USING WAVE SPECTRA
79
γ =3.3, but can vary between 1 and 7, and
σ =
0.07 if ω ≤ ω
p
0.09 if ω>ω
p
.
As the fetch is an important element of the sea state
description, we use the JONSWAP spectrum, rather
than the Pierson-Moskowitz one.
0
4
8
12
16
0 0.2 0.4 0.6 0.8 1 1.2
variance (m
2
·s)
frequency (rad·s
−1
)
Pierson-Moskowitz
100 km
200 km
300 km
400 km
Figure 2: JONSWAP frequency spectrum, S
J
(ω), with a
wind speed of U
10
=15m·s
−1
, and different fetch values F .
Other parametric spectrum models can be found
in oceanographic literature, including double peaked
spectrum for swell coming from distant storm. These
spectra are often expressed as a function of frequency
f = ω/(2π). To preserve integral equality, conver-
sion between spectra is done using substitution:
S
f
(f)df =
S
ω
(ω)dω =
S
ω
(ω(f))
dω
df
df
=
S
ω
(2πf)2π df.
(23)
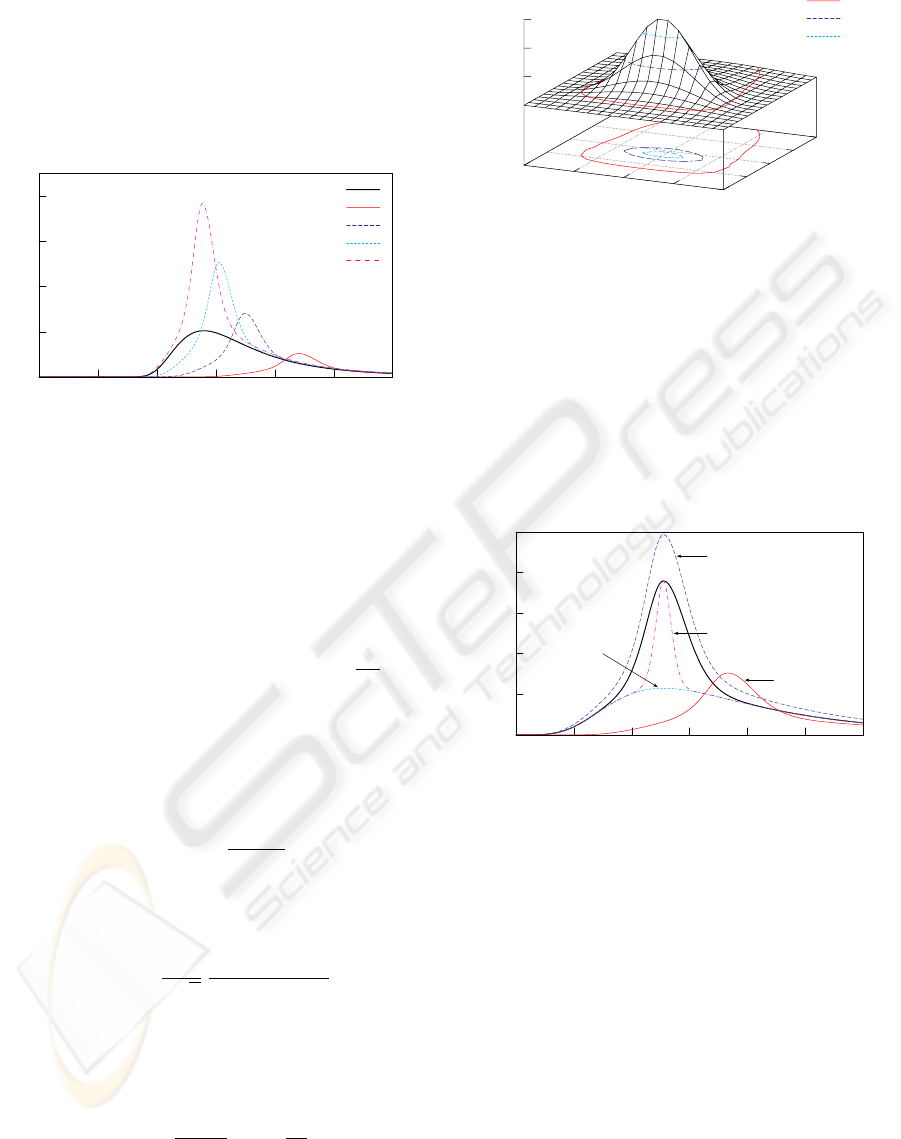
For the dispersion relation, we use the expression
found by (Longuet-Higgins, 1962):
D(ω,θ)=N(s(ω)) cos
θ
w
− θ
2
2s(ω)
, (24)
where θ
w
is the main direction of the spectrum, usu-
ally the direction of the wind, and N (s(ω)) is a nor-
malization factor defined as
N(s(ω)) =
1
2
√
π
Γ(s(ω)+1)
Γ(s(ω)+1/2)
,
and Γ() is the gamma function (figure 3). The func-
tion s(ω) controls the sharpness of the directional
spreading and has been defined by (Mitsuyasu and al.,
1975) as
s(ω)=11.5
g
ω
p
U
10
2.5
ω
ω
p
µ
,
with
µ =
5 if ω ≤ ω
p
−2.5 if ω>ω
p
.
0.1 m
2
·s
1.1 m
2
·s
2.1 m
2
·s
π
π/2
0
−π/2
−π
direction (rad)
0.4
0.6
0.8
1
1.2
freq. (rad·s
−1
)
0
1
2
3
variance (m
2
·s)
Figure 3: 3D plot of the JONSWAP spectrum, E
J
(ω, θ),
with U
10
=25m·s
−1
, F = 100 km and θ
w
= 0 rad.
For a simple use, only wind speed, direction and
fetch need to be given to the spectrum. In order
to make the spectrum curve fit particular data, like
oceanic measurements, the default parameter values
can be changed, until the desired curve shape is
reached (figure 4).
0
0.2
0.4
0.6
0.8
1
0.6 0.8 1 1.2 1.4 1.6 1.8
variance (m
2
·s)
frequency (rad·s
−1
)
α × 1.3
w
p
× 1.2
σ =0.03
γ =1
Figure 4: JONSWAP frequency spectrum, S
J
(ω), showing
how different parameter values alter the curve shape (U
10
=
15 m·s
−1
, F = 50 km).
3.3 Spectrum Sampling
We now look for a selection of wave frequencies and
directions. For the FFT based model, the size and
sample number of the rendered surface determine the
set of wave vectors to be used (see equation 8). For
the parametric one, as there is not such restriction,
we select waves that are the most representative of
the spectrum energy dispersion. For this purpose,
we sample the wave spectrum over a limited domain
[ω
min
,ω
max
] × [θ
min
,θ
max
]. We want this domain
to be the most representative of the whole spectrum,
i.e. we want it to be as dense as possible. So, by
iteration, we found one of the smallest domain that
contains roughly 95% of the total energy.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
80
For simplicity, a regular sampling could be used
by taking a constant size ∆ω × ∆θ for each sam-
ple, with ∆ω =(ω
max
− ω
min
)/N and ∆θ =
(θ
max
− θ
min
)/M , where N and M are the num-
ber of frequency and angle samples, respectively. But
an adaptive sampling is more appropriate, especially
when few waves are summed, as this better reflects the
spectrum attributes. For this purpose, we over-sample
parts of the spectrum representing large amount of
energy, like (Thon and Ghazanfarpour, 2002). For a
given spectrum, we build a quadtree of 4+6n sam-
ples, where n is an integer. Samples have different
sizes but each of them roughly corresponds to the
same energy, and so the same amplitude. Sample cen-
ters give us corresponding wave vector polar coordi-
nates (figure 5). So, we now have a set of wave ampli-
tudes, frequencies and directions (a, ω, θ). In order to
use them with ocean models, we convert frequencies
to wavenumbers and polar coordinates to Cartesian
ones, to get a set of wave vectors (κ).
1
ω
max
ω
min
0
θ
max
0θ
min
frequnecy (rad·s
−1
)
direction (rad)
Figure 5: 2D projection of the spectrum from figure 3,
showing adaptive sampling with 16 waves.
Using this method, we make oceanic surfaces with
realistic wave shapes and global structure which cor-
responds to the wanted weather condition. However,
if a close look at the surface is needed, we have to pay
special attention to short waves. When wind speed
or fetch increase, energy is transferred to lower fre-
quency waves, i.e. to high wavelength waves (see fig-
ures 1 and 2). As we use adaptive sampling, we take
more samples for low frequencies and less for high
ones, resulting in a smoother surface at a human scale
and a lack of realism. So, the spectrum needs to be
sampled over a second domain corresponding to short
waves, up to the capillary wave size. This domain
must be close to the first one, to avoid a “hole” in the
whole frequency range. The number of samples we
take can vary, depending of the distance between the
observer and the surface, in the spirit of (Hinsinger
et al., 2002).
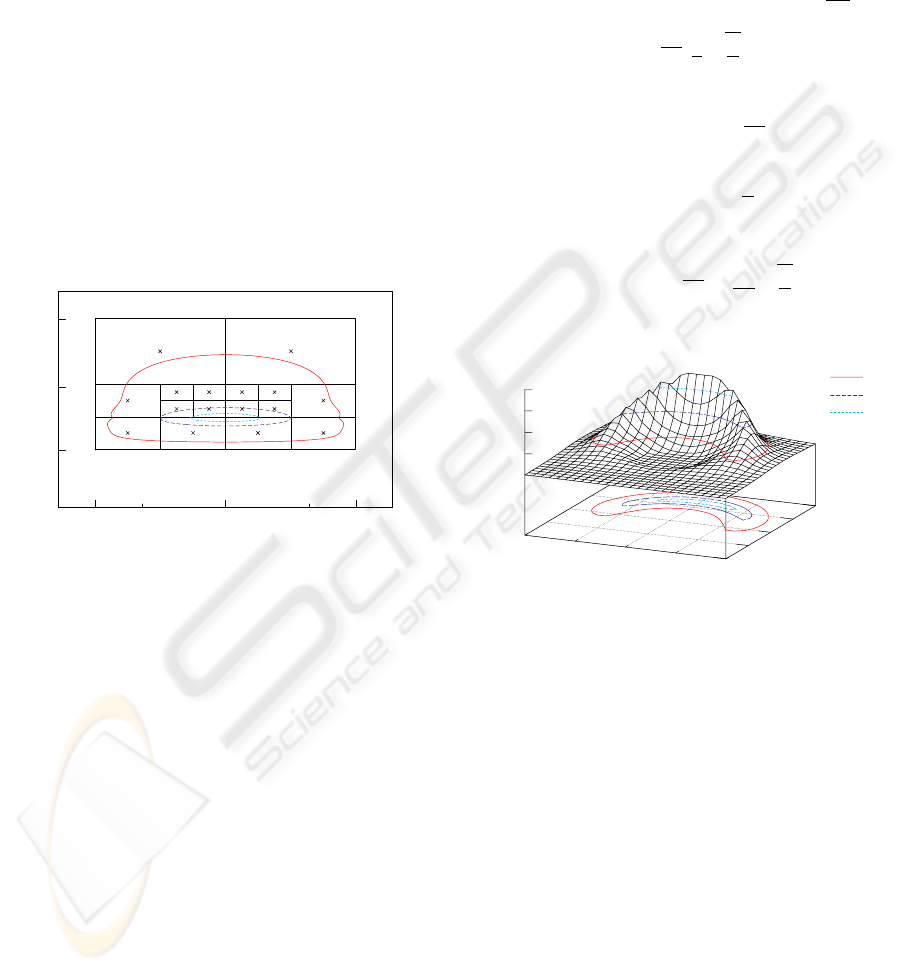
For the FFT based model, we sample a spectrum
E(κ) in the Cartesian wavenumber domain (figure 6).
As the parametric spectra do not give same values
for a wave and its opposite (i.e. E(κ) = E(−κ)),
the real number method (equation 9) cannot be used.
To preserve integral equality, spectrum conversion is
done according to substitution rule. First, we convert
the frequency spectrum S
ω
(ω) to a wavenumber spec-
trum S
κ
(κ):
S
κ
(κ)dκ =
S
ω
(ω)dω =
S
ω
(ω(κ))
dω
dκ
dκ
=
S
ω
(
√
gκ)
1
2
g
κ
dκ.
(25)
Second, we convert the wavenumber directional spec-
trum E
κ,θ
(κ, θ)=S
κ
(κ)D(ω =
√
gκ, θ) from polar
coordinates to Cartesian ones:
E
κ
(κ)dκ =
E
κ,θ
(κ, θ)
1
κ
dθ dκ. (26)
Finally, we get
E
κ
(κ)=E
ω,θ
(
√
gκ, θ)
1
2κ
g
κ
. (27)
50 m
4
150 m
4
250 m
4
8
4
0
-4
-8
κ
x
(10
−3
m
−1
)
8
4
0
-4
-8
κ
y
(10
−3
m
−1
)
0
100
200
300
400
variance (m
4
)
Figure 6: The same spectrum as in figure 3, but in the wave
vector domain κ
x
× κ
y
(i.e. E
J
(κ)).
As the wavenumber vectors are set by the rendered
surface attributes, we cannot use adaptive sampling.
Furthermore, many vectors correspond to a negligible
energy amount but are still used. This is somehow
balanced by the effectiveness of the FFT algorithm:
for the same computation time, we can use a lot more
waves, and so spectrum samples, than with the para-
metric method. However, we have to deal with sur-
face size and sampling on one hand, and with spec-
trum sampling on the other hand. Looking at equa-
tion 8, we see that absolute values of wave vector
components κ
x
and κ
y
are bounded, i.e. 2π/L
x
≤
|κ
x
| <πN/L
x
and 2π/L
y
≤|κ
y
| <πM/L
y
. So,
we first have to consider surface size L
x
× L
y
,as
it determines the lowest wavenumber value. Then,
we choose the number of surface (and so spectrum)
samples, knowing that it is related to the highest
wavenumber value.
REALISTIC SIMULATION OF OCEAN SURFACE USING WAVE SPECTRA
81

4 STATISTICAL PROPERTIES OF
THE OCEAN SURFACE
Measurements of oceanic wave statistics have shown
that, to a reasonable accuracy, the surface elevation η
follows a normal distribution. Attributes of oceanic
waves we simulate are consistent with these observa-
tions. If we look at the oceanic surface as an infinite
sum of waves with infinitely small amplitude, we see
that the wave spectrum is a probability density func-
tion of wave frequencies and directions. Furthermore,
the variance of the surface elevation is finite (equa-
tion 12). So, by virtue of the central limit theorem,
we know that the more waves we sum, the closer to
the normal distribution is the simulated surface eleva-
tion.
Another observed characteristic of oceanic waves
is that their heights follow a Rayleigh distribution,as
noted by (Fournier and Reeves, 1986). This distribu-
tion is used with a parameter σ = H
s
/2, where H
s
≈
4
var(η) is known as the significant height. From
this, it can be shown that the probability that a wave
has a larger height than H
s
is exp(−2) ≈ 0.1353.
Since they use defined amplitudes, the ocean mod-
els presented in section 2 are known as determinis-
tic methods. (Tucker et al., 1984) showed that uni-
formly distributed random phase terms φ should be
replaced with random amplitudes. An expression like
a cos(κx
0
− ωt + φ) becomes
r
1
a cos(κx
0
− ωt)+r
2
a sin(κx
0
− ωt)
= Ra sin(κx
0
− ωt +Φ),
(28)
where r
1
and r
2
are random numbers from the stan-
dard normal distribution, i.e. with a mean of zero and
a standard deviation of one, R =
r
2
1
+ r
2
2
follows a
Rayleigh distribution and
Φ=
⎧
⎪
⎪
⎨
⎪
⎪
⎩
arctan
r
1
r
2
if r
2
≥ 0
arctan
r
1
r
2
+ π if r
2
< 0.
This non-deterministic method has better statistical
properties than the previous one. In order to use it
with parametric and FFT methods, we rewrite equa-
tions 4 and 6 according to equation 28.
5 RESULTS AND DISCUSSION
We made a simple real-time implementation of ocean
models. We focused on wave shapes and animations,
without considering effects like Fresnel reflectivity
and transmissivity, or foam and spray (figure 7). Of
course, rendering could have been achieved with clas-
sical high quality techniques as well. Interactions of
objects with ocean surfaces are not specially handled
by the Lagrangian model we use, and are beyond the
scope of this paper.
Since our method preserves the main spectrum en-
ergy, the global structure of the rendered surface is in-
dependent of the number of waves we sum. For both
ocean models, the sea state we get is always consis-
tent with the provided wind parameters, which cannot
be achieved with other existing methods. Since these
parameters are the only ones needed to have full con-
trol of the method, there is no need for the user to
adjust the resulting surface by trial and error.
As previously noted, the FFT model can be partic-
ularly tedious to use. To catch a reasonable part of the
spectrum, the grid length and the number of samples
have to be carefully chosen, whatever are the desired
surface characteristics. For example, taking 512 sam-
ples up to a frequency of 25 rad·s
−1
requires a grid
length of no more than 25 m. Furthermore, as this
leads to a lowest frequency of about 1.5 rad·s
−1
, the
spectrum peak may be under-sample.
We have tested our implementation with a 3 GHz
Pentium 4 PC and a Radeon 9200 graphic board. With
the FFT model, we got about 65 fps and 13 fps with,
respectively, a grid of 128 × 128 and 256 × 256 sam-
ples. With the parametric equations, we got 8 fps with
a regular grid of 128 × 128 samples and 50 waves.
And taking less than 100 waves leads to poor detailed
results. Clearly, only the FFT can reach interactive
rate. Although we do not implement an adaptive sur-
face mesh, it seems obvious this could not compete
with the FFT speed. Parametric equations should be
kept for non-interactive rendering, since they are eas-
iest to use.
6 CONCLUSION
We have presented a method for accurate wave energy
spectrum sampling that allows realistic ocean surface
synthesis and animation. For given wind parameters,
the wave heights and directions are computed such
that statistical properties of the resulting surface are
correct. Since it does not rely on any ocean model,
this method is suitable for Gerstner equations and
Fourier transforms.
ACKNOWLEDGMENTS
The author wish to thank Bertrand le Sa
¨
ec and Jean-
Christophe Gonzato for rereading this paper.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
82
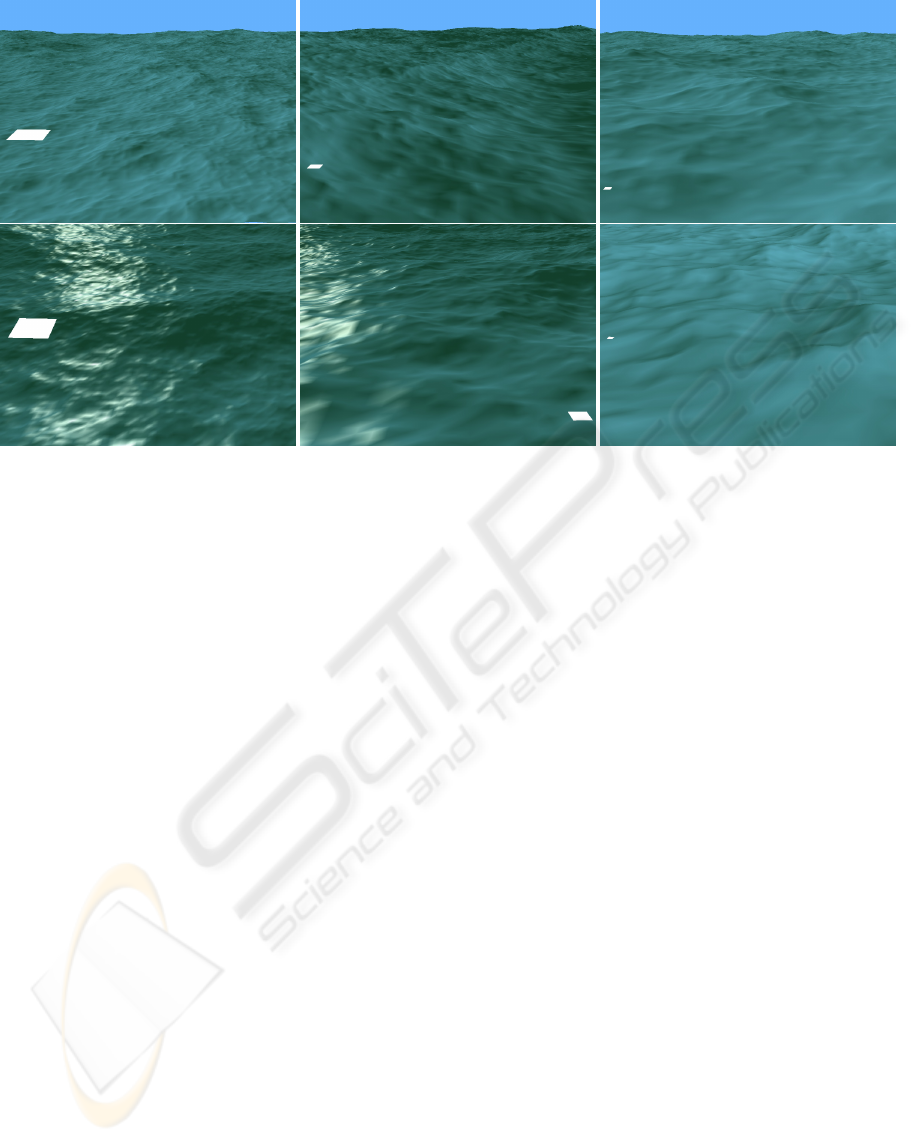
Figure 7: FFT with a grid of 512 × 512 samples. Left: grid length is 50 m and wind speed is 5 m·s
−1
. Middle: grid length
is 450 m and wind speed is 15 m·s
−1
. Right: grid length is 1500 m and wind speed is 25 m·s
−1
. White square is 1 m wide.
REFERENCES
Airy, G. B. (1845). Tides and waves. In Encyclopaedia Me-
tropolitana, volume 5, chapter 192, pages 241–396.
Cieutat, J.-M., Gonzato, J.-C., and Guitton, P. (2001). A
new efficient wave model for maritime training simu-
lator. In Spring Conference on Computer Graphics.
Enright, D., Marschner, S., and Fedkiw, R. (2002). Anima-
tion and rendering of complex water surfaces. In Conf.
on C. G. and interactive techniques, pages 736–744.
Fournier, A. and Reeves, W. T. (1986). A simple model
of ocean waves. SIGGRAPH Computer Graphics,
20(4):75–84.
Gamito, M. N. and Musgrave, F. K. (2002). An accurate
model of wave refraction over shallow water. Com-
puters & Graphics, 26(2):291–307.
Gonzato, J.-C. and le Sa
¨
ec, B. (2000). On modeling and
rendering ocean scenes. Journal of visualisation and
computer simulation, 11:27–37.
Hasselmann, K. and al. (1973). Measurements of wind-
wave growth and swell decay. Erg
¨
anzungsheft zur
Deutschen Hydrographischen Zeitschrift, (12).
Hinsinger, D., Neyret, F., and Cani, M.-P. (2002). Inter-
active animation of ocean waves. In Symposium on
Computer Animation, pages 161–166.
Iglesias, A. (2004). Computer graphics for water modeling
and rendering: a survey. Future generation computer
systems, 20(8):1355–1374.
Longuet-Higgins, M. S. (1962). The distribution of inter-
vals between zeros of a stationary random function.
Philosophical Transactions for the Royal Society of
London, 254:557–599.
Mastin, G. A., Watterberg, P. A., and Mareda, J. F. (1987).
Fourier synthesis of ocean scenes. IEEE Computer
Graphics and Applications, 7(3):16 – 23.
Mihalef, V., Metaxas, D., and Sussman, M. (2004). Anima-
tion and control of breaking waves. In Symposium on
Computer Animation, pages 315–324.
Mitsuyasu, H. and al. (1975). Observations of the direc-
tional spectrum of ocean waves using a cloverleaf
buoy. Jour. of physical oceanography, 5(4):750–760.
Peachey, D. R. (1986). Modeling waves and surf. SIG-
GRAPH Computer Graphics, 20(4):65–74.
Phillips, O. M. (1957). On the generation of waves by tur-
bulent wind. Journal of fluid mechanics, 2:417–445.
Pierson, W. J. and Moskowitz, L. (1964). A proposed spec-
tral form for fully developed wind seas. Journal of
geophysical research, 69:5181–5203.
Premo
ˇ
ze, S. and Ashikhmin, M. (2001). Rendering natural
waters. Computer Graphics Forum, 20(4):189–199.
Rankine, W. J. M. (1863). On the exact form of waves near
the surface of deep water. Philosophical transactions
of the Royal society of London, pages 127–138.
Tessendorf, J. (2001). Simulating ocean water. ACM SIG-
GRAPH course notes. Updated in 2004.
Thon, S. and Ghazanfarpour, D. (2002). Ocean waves syn-
thesis and animation using real world information.
Computers and Graphics, 26(1):99–108.
Tucker, M. J., Challenor, P. G., and Carter, D. J. T. (1984).
Numerical simulation of a random sea. Applied ocean
research, 6(2):118–122.
von Gerstner, F. J. (1804). Theorie der wellen. Abhand-
lungen der K
¨
oniglichen B
¨
ohmischen Gesellschaft der
Wissenschaften, 1:1–65.
REALISTIC SIMULATION OF OCEAN SURFACE USING WAVE SPECTRA
83
