
A BASIC GESTURE AND MOTION FORMAT FOR VIRTUAL
REALITY MULTISENSORY APPLICATIONS
Annie Luciani, Matthieu Evrard, Damien Couroussé,
Nicolas Castagné, Claude Cadoz, Jean-Loup Florens
ACROE & ICA laboratory,
INPG, 46 av. Felix Viallet, Grenoble, France
Keywords: File Format, Gesture, Movement, Motion Capture, Virtual Reality, Computer Animation, Multisensoriality.
Abstract: The question of encoding movements such as those produced by human gestures may become central in the
coming years, given the growing importance of movement data exchanges between heterogeneous systems
and applications (musical applications, 3D motion control, virtual reality interaction, etc.). For the past 20
years, various formats have been proposed for encoding movement, especially gestures. Though, these
formats, at different degrees, were designed in the context of quite specific applications (character
animation, motion capture, musical gesture, biomechanical concerns…). The article introduce a new file
format, called GMS (for ‘Gesture and Motion Signal’), with the aim of being more low-level and generic,
by defining the minimal features a format carrying movement/gesture information needs, rather than by
gathering all the information generally given by the existing formats. The article argues that, given its
growing presence in virtual reality situations, the “gesture signal” itself must be encoded, and that a specific
format is needed. The proposed format features the inner properties of such signals: dimensionality,
structural features, types of variables, and spatial and temporal properties. The article first reviews the
various situations with multisensory virtual objects in which gesture controls intervene. The proposed
format is then deduced, as a mean to encode such versatile and variable “gestural and animated scene”.
1 INTRODUCTION
Gesture, motricity, and haptic perception are
deciding factors in the way we act on and we
perceive our environment. During the last few years,
many research centers have focused on gesture
control and movement analysis or synthesis, in
domains as various as surgery, aeronautics,
multimedia, artistic creation, and generally speaking
in every interactive systems. More and more,
applications are developed in opened and versatile
contexts and 3D images synthesis are produced in
interactive multimedia installations, in a such a way
that they have to be correlated to sound synthesis
processes, or other processes.
Thus, one today would need a low level format
to be used by developers and users in Computer
graphics, Computer Music, interactive systems and
versatile VR platforms. Several formats already exist
for encoding motion control/gesture data. However,
these formats were introduced in the context of quite
specific application and uses, usually do not focus
strictly on motion and gesture, and were not
designed, at first, to be used in versatile and
heterogeneous contexts. The data they encode are
thus context dependent, and they hardly correspond
with motion data in its more general meaning. This
article questions the need of a minimal and low level
description of gesture and motion data, able to code
all their features independently of the context in
which they have been produced and will be used.
The two next sections situate the various notions
at hand and discuss the properties of motion/gesture
data. The section 4 reviews the various existing file
formats, and discuss their advantages and lacks. The
two last sections present the requirements for a more
generic encoding of gesture data and the main
features of the proposed format, called GMS.
349
Luciani A., Evrard M., Couroussé D., Castagné N., Cadoz C. and Florens J. (2006).
A BASIC GESTURE AND MOTION FORMAT FOR VIRTUAL REALITY MULTISENSORY APPLICATIONS.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 349-356
DOI: 10.5220/0001355803490356
Copyright
c
SciTePress

2 AMBIGUOUS TERMS
Given the ambiguity of various terms the article
focuses on, a few definitions have to be discussed.
2.1 Action / Movement / Signal
Movement (or motion) is the moving in space of a
part or of the totality of a system. Movement should
be distinguished from action, which is the result of
the movement. Following (Smith & al., 1984) ,
action is the result of the task achieved or to be
achieved - for example: “to drink a glass of water”.
Each action can be performed by means of many
different movements. And a movement can be
characterized by properties, such as soft, vivid, etc.
Action can be described at a high symbolic level,
for example by language, or by means of event-
based representations. Conversely, movements are
explicit spatio-temporal phenomena. They need to
be represented as temporal signals.
2.2 Motion and Gesture
Another evidence concerning motion is that it refers
to the evolution produced by a physical system,
whatever it is: human body, real mechanical objects
equipped with sensors, virtual objects, etc. One can
speak as well of the motion of a human body, of a
leaf, of a sounding source, etc. Motion is therefore
considered as the result of the performance, i.e. as an
output of an evolving system.
Conversely, when focusing the use of such
movements as “a command” or an input to control
the motion of another system, the only usable terms
are “action” or “gesture”. Unfortunately, as said in
the previous paragraph, “action” refers more to the
high level of the task than to way it was achieved. It
is very general, and can be used for any type of
systems. Conversely, “gesture” is usually reserved to
humans. Facing this dilemma, we decide to
emphasize the differentiation between input and
output functionalities, more than the nature of the
evolving system that produces the signals. Thus, we
call “gestures” all the motions that can be applied as
an input signal, i.e. as a “cause of a performance”,
whatever the producing system is (human beings or
other objects).
Anyhow, Motion/output and Gesture/input are
two representatives of similar temporal signals,
corresponding with an evolving physical system –
see Figure 1. Thus, to simplify, the term ‘gesture’
and ‘motion data’ could be used in the following to
refer to this sort of ‘gesture like’ data, no matter it is
considered as an input or an output of an evolving
systems, possibly a human body.
Physical
System
Input signals
Gesture G(t) ~ 1KHz
Output signals
Sound S(t) Š 44 KHz
Motion M(t) ~ 1KHz
Images I(t) Š 50 Hz
Figure 1: Gestures and Motion as input and outputs of
physical systems. Gesture (input) and Motion (output) are
comparable types of data.
Rather than discussing the differences between
Gesture and Motion, one can emphasize their
similarities. This leads to identify them as a new and
unique type of data, beside visual and acoustic data,
and to introduce a dedicated encoding format.
2.3 Gesture and Control
Gestures can be considered as a common feature of
numerous situations, applications, systems etc., and
they may be a privileged mean for allowing those
systems to cooperate: animation control, animation
performance, musical control and performance,
multisensory control and performance such as in VR
or in multimedia arts.
The figure 2 illustrates some basic cases of
gesture signals and gesture control. On the figure,
grey circles are placed on the streams one can
consider as gesture streams (or as being equivalent
to a gesture signal). Conversely, the grey squares are
placed on the streams that are no more gesture
streams.
In the case of gesture control of real or digital
musical instruments, the gesture signals can be
either the signals sensed directly on the human body
(fingers, hands, arms, whole body) (figure 2, grey
circles 1 and 2), or the motions produced by an
object manipulated by the player (hammer, key,
bow, stick, etc...) (figure 2, grey circle 3).
In the case of gesture control of 2D or 3D visual
motions, the gesture signals can be either the signal
sensed directly on the human body (figure 2, grey
circles 4 and 5), or the motions produced by an
object manipulated by the performer (sticks, force
feedback devices, etc.) (figure 2, grey circles 6 and
7). Conversely to what happens in musical
instruments, in which the output “sound” is usually
not considered as a “gesture”, the 3D motions
provided by a 3D virtual objects (Figure 2, grey
circle 7) are of the same nature as the 3D motions
produced by a human body in body motion capture.
They may be used as an input for controlling another
system (3D object , musical instrument, etc.).
Consequently, a 3D virtual object produces signals
that can be considered as being homogeneous with
“gestures” (Figure 2, grey circles 4, 5, 6).
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
350
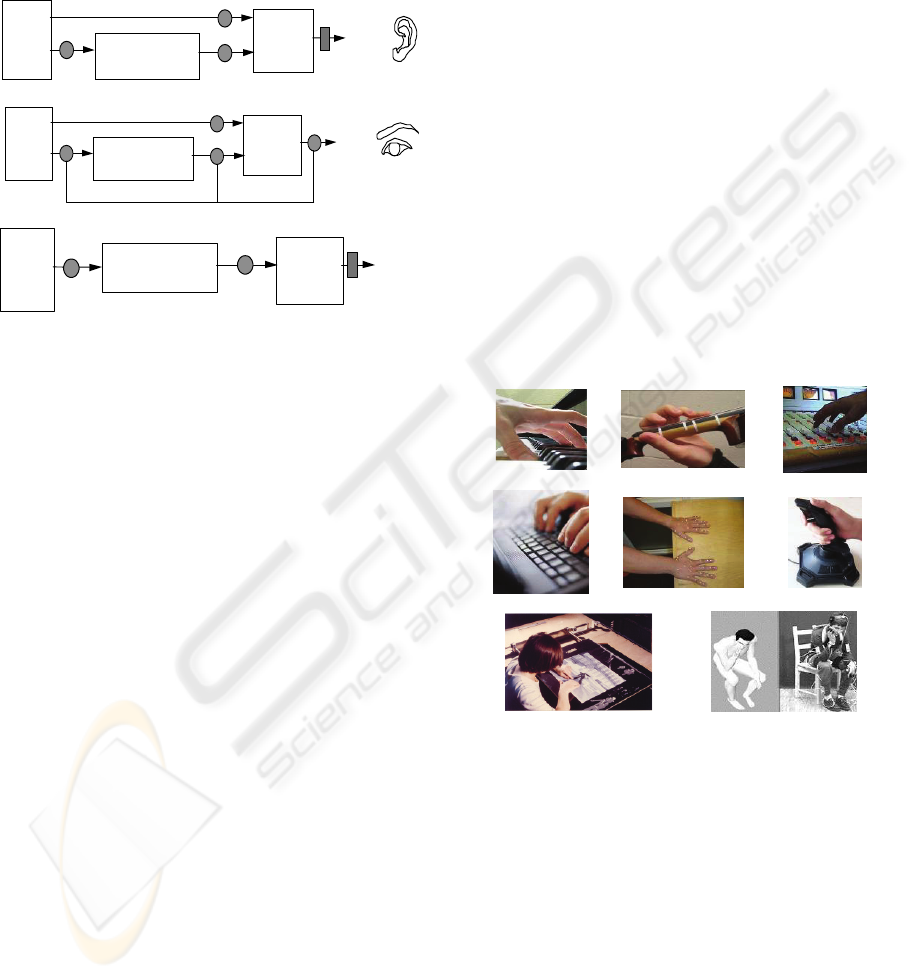
In the case of the gestures that produce formal
and symbolic data, as when acting on a computer
keyboard, the gesture signals (Figure 2, grey circles
8 and 9) are transformed in outputs (words,
sentences) that can usually no more be considered as
gesture signals.
Digital
Musical
Instrument
Sound
Huma
Body
Motion
Non sounding object
(Excitor)
1
2
3
3D
object
motions
Virtual 3D
Object
Huma
Body
Motion
Non sounding object
(Excitor)
4
5
6
7
Figure 2: Various cases of gesture control. Up: gesture
control of digital musical instrument. Middle: gesture
control of a 3D virtual object. Down: gesture control of
formal and symbolic data.
3 CHARACTERIZATION OF
GESTURE SIGNALS
Gesture signals, whatever the way they are produced
(objects or human motion, virtual object…), and
whatever the way they are considered (as outputs or
inputs of evolving systems), do present specific
properties that allow distinguishing them among
other temporal signals (especially aero-acoustical
signals or visual signals). This section reviews these
properties that will be used as a basis for defining a
basic generic format.
3.1 Morphological Versatility
A first evidence is the morphological versatility of
gestures. While images and sounds can be displayed
in predefined environments (displays or 3D Caves,
with fixed sizes and resolution, stereo or
quadraphonic rendering for sounds, etc.), the
structure and the morphology of gesture signals are
more versatile, depending on the tasks and the
manipulated tools. To take into account this inner
versatility, we propose to structure gesture signals
along two complementary features: geometrical and
structural dimensionalities.
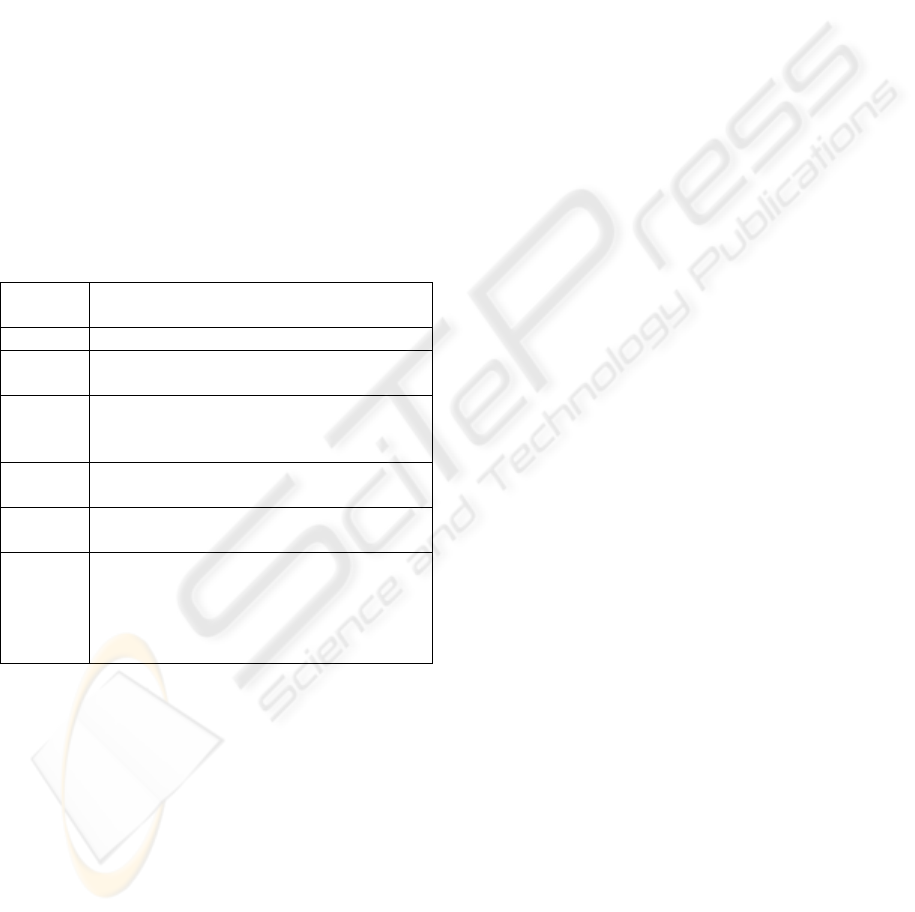
3.1.1 Geometrical Dimensionality
Geometrical dimensionality refers to the
dimensionality of the space in which the gesture is
evolving. It can vary from a pure scalar or a set of
scalars to geometrical 1D, 2D, 3D.
For example, piano or clarinet keys are pushed or
closed according to a 1D finger motion (figure 1a).
More generally, controlling sounding objects or
tuning parameters (for example the value of an
elasticity or the amplitude of a deformation), can be
made through devices that evolve in a 1D non
oriented space, like set of sliders or set of knobs
(figures 1c, 1d), and that can be described by a
scalar or a set of scalars.
Conversely, in cartoon animation or in scrap-
paper animation or animated painting, the space is
reduced to a plane. Gestures and motions evolve in a
2D space (Figure 3, g), and can be described on two
orthogonal oriented axes.
When we manipulate an object (real or virtual),
the dimensionality of the space is obviously 3D.
Thus, describing motion or gesture requires using
three orthogonal oriented axes (figure 3, e, f, h).
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
Figure 3: Versatility of the gesture morphology.
3.1.2 Structural Dimensionality
For a given geometrical dimensionality, gestures
have another type of variability, related to their
functional organization. We call this second
variability structural dimensionality. In the case of
articulated 3D solids, it usually corresponds to the
number of degrees of freedom. A couple of
examples allow illustrating the variability of
structural dimensionality of gesture.
When we are acting on a keyboard of n keys (a
piano keyboard, a computer keyboard, a set of
buttons…), the performed gesture, and similarly the
Formal
and
symbolic
processing
Huma
Body
Motion
Computer keybord
or pad
8
9
Formal
data
A BASIC GESTURE AND MOTION FORMAT FOR VIRTUAL REALITY MULTISENSORY APPLICATIONS
351

signals produced by the n keys, the geometrical
dimensionality is 1, but the system can be
considered in two ways either as n independent
systems (for example n systems of one key), or as a
single system of n degrees of freedom.
When dealing with human body motion, the
geometrical dimensionality is 3 but the structural
dimensionality (ie: the number of considered
degrees of freedom) is variable: more than 200 in the
real body, only N when using a motion capture
systems with N sensors (N=1 to 16, or more).
In physical models of a bowed string, the two
dimensions of the deformations (pressing the string,
bowing the string) are usually decoupled, and the
system can be considered as two superposed 1D
gestures, thus as one system of two 1D DoF.
In particle physical model of a flow, the number
N of 3D particles, i.e. the number N of 3D DoF,
could be more than some hundreds. Considering that
this flow can be used to control large spatial scene
(for example wind playing a musical instrument,
flow controlling atmospheric or oceanic
deformations), the motions can be stored as gestures
of N 3D DoF.
3.1.3 To Conclude
This analysis and these examples show that the
geometrical dimensionality of gestures should not be
fixed, since it can vary from scalar to 3D (we don’t
examine here space with larger geometrical
dimensionality, although the case can occur). They
show also that the structural dimensionality can vary
widely (from 1Dof to several hundred). In addition,
the structural dimensionality cannot be totally
independent of how the system is analyzed by the
designer that must be able to declare them freely.
3.2 Quantitative Ranges
Additionally to the geometrical and structural
dimensionalities, gesture signals present specific
quantitative spatial and temporal features.
3.2.1 Temporal Ranges
As shown on Figure 4, the frequency bandwidth
range is one of the quantitative features that allow
distinguishing gesture signals among others
(especially aero-mechanical signals, visual motions).
Although the three zones of the figure 4 are
overlapped, they enable a useful categorization:
visualizing motions requires a sampling rate up to
100 Hz; manipulating an object with force feedback
requires a sampling rate from some Hz to some kHz;
recording sounds requires a sampling rate from
around 10 kHz to some 40 kHz. Indeed, gesture
signals are at the middle range.
O
1 KHz 10 KHz
Mechanica
l
signa
l
s
(G
estures
or
motions
)
A
ero-mechanical (acoustical) signals
Frequency bandwidth
100 Hz
Visua
l
motions
Figure 4: Temporal range of sensory signals.
3.2.2 Spatial Ranges
Spatial positions and ranges is another feature of
gesture signals. Whereas audio signals are zero-
centered deformations of about some millimeters,
gestures and visual motions correspond with
deformations and displacements that are non-
necessarily centered on 0, and that are at a larger
spatial scale, from centimeters to meters.
3.2.3 To Conclude
One can note that the quantitative properties of
gesture signals position them at middle range of the
signals involved in interactive computer graphics,
specifically when using force feedback devices and
physically-based simulation, or multisensory VR
simulation platforms including sounds: (1) it is
similar to visual motion as for spatiality, but it needs
higher frequency rate; (2) it needs a lower frequency
rate than the sound, but it runs at higher non-
centered spatial range.
Indeed, one can consider the gesture signal as a
pivot for multisensory VR simulation platforms.
Visual motions can be produced by simply under-
sampling them. A non-linear control-simulation
process can then produce sounds, transforming low
frequency gesture command signals in high
frequency sound signals.
3.3 Type of variables
Since motions and gestures are produced by physical
systems (either real or virtual), and used to control
physical systems, the data can be of two different
types: (1) extensive variables, such as variables that
derivates from spatial information (positions,
velocities, angles…); and (2) intensive variables as
forces, torques, etc. Noticeably, one can note that
visual and acoustical data are only extensive
variables (positions and/or displacements).
In natural situations, when gestures are used for
manipulating object, physical energy is exchanged
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
352
between the two interacting bodies (for example
object and human). To represent such interactive
dynamic systems, the correlation between extensive
and intensive variables must be considered, either
explicitly as in Newtonian formalism, or implicitly
as in energy formalisms. Both extensive and
intensive variable are needed for a complete
encoding of the interaction.
4 A REVIEW OF EXISTING
MOTION FILE FORMATS
Several motion file formats have been developed so
far (Meredith, 2000 , Van Baerle, 2000). Here, we
position some of the most known (see Table 1) along
the properties of gesture signals elicited in the
previous paragraphs: versatility of the geometrical
and structural dimensionality, spatial and temporal
requirements, and multiplicity of the types of data.
Table 1: some of the most known ‘gesture/motion’ format.
BVA, BVH
ASK, SDL
[BVH] Developed by Biovision, a firm
providing optical motion capture systems.
HTR, TRC [HTR] Developed by the Motion Analysis.
AOA [AOA] Designed by Adaptive Optics, a firm
that develops motion capture hardware.
ASF
AMC
[ASF] Developed by Acclaim, a video game
firm. Now used by Oxford Metrics (Vicon
motion capture Systems). Public domain.
BRD [BRD] Introduced by Lambsoft, for the
"Flock of Birds" motion capture system.
CSM [CSM] 3D Studio Max and Character Studio
format. Recoding of characters’ movements.
C3D [C3D] National Institute of Health. Initially
encoding movements of athletes. Largely
used today (ex: as a file format for encoding
basic marker data, for the Vicon Motion
Systems).
4.1 Origin of the Existing Formats
The considered formats have been historically
introduced in the context of specific application and
uses – mostly in the context of Motion Capture.
Though some have eventually been adapted to other
applications and usages than their preliminary target,
they had neither been designed at first to be used in
other applications, nor as a data exchange mean.
Consequently, the data they encode, and the manner
these are encoded, depend on the context of the
usages preliminary foreseen, and hardly correspond
with gesture / motion data in its more general
meaning.
4.2 Object Dependence
Except C3D, all the formats imply a hierarchy
depicting a hierarchical dependency over the various
recorded signals. The hierarchy is inherited from the
hierarchical structure of the object that produces the
signals. For example, describing the movement of a
humanoid is made according to a pre-defined tree-
like structure of a cinematic chain of the body
(Herda &al., 2000). In that case, most often, the
value of a position/rotation is given in the coordinate
system of the upper hierarchical level it belongs to.
As for it, the CSM file format developed along
with the Character Studio software is not explicitly
hierarchy-based. It encodes the motion of a set of 3D
points in absolute coordinate. However, using CSM
files within Character Studio requires the names of
all the points to match Character Studio setup. A
skeleton is implied, and the number of points and
their ‘meaning’ are fixed.
Such a hierarchical structure has proved to be
operational in domains such as motion planning or
character animation. It is most often adapted to the
case of articulated objects such as human body,
rigid-articulated robot, etc. However, the use of a
hierarchical structure does not apply to motion/
gesture encoding in its more general meaning –
especially to the case of deformable non tree-
articulated objects and mechanisms.
4.3 Context Dependence
Some of the discussed formats contain additional
data dealing with the context of data acquisition. The
context data are typically data concerning the
parameters of the capture system (number of
sensors, captors used to determine the movement at
a certain moment, sensitivity of sensors, etc.).
The C3D file format is the most representative
example of such additional data recording. In a C3D
file, each motion stream is associated with the
description of the measurement process that was
used. Indeed, C3D corresponds firstly with
measurement or experimental setup recordings.
4.4 Predefined Dimensionality
Most of the formats predefine a specific dimension
for the recorded data: 3D points in AOA or CSM,
“7D points” in BRD. In the BVH, ASF/AMC and
HTR file formats, the dimension of each join is
declared in accordance with the constraints
underlain by the hierarchical structure. Omitting a
coordinate corresponds with constraints of the
mechanical system. Once again, one can observe
A BASIC GESTURE AND MOTION FORMAT FOR VIRTUAL REALITY MULTISENSORY APPLICATIONS
353

that these formats suppose that the recorded motion
data are intimately associated with a tree-like
structure of the object supporting the sensors. As for
them, C3D files store conventional 3D positional
information. 1D or 2D motion data may be recorded,
by fixing one or more coordinate to zero all along
the stream. Though, scalar data can also be recorded
within the raw data (see §4.5).
Anyhow, one can consider that pre-defining the
dimensionality of the data to be stored is a real
problem since the versatility of dimensionality is a
core property of gestures, and since one may often
have to consider coexistence of different
dimensionalities in the same gesture stream.
4.5 Type of Variable
C3D files can encode two categories of data: ‘analog
data’, i.e. scalar data acquired from any kind of
sensor, and ‘3D data’ i.e. motion-like data displayed
by a motion capture system. The format implies no
inner limit in the type of the ‘analog data’, so that
any type of variable may be recorded, including
hearth rate, elecromyogram, etc. Additionally, a
non-optimized trick allows recording ‘kinematical
data’ (angles, moment, acceleration…) processed
from the motion data. Thus, besides the fact that
C3D is widely used for motion recording, it does
overpass the strict scope of motion and gesture. It is
a very flexible and adaptable format – but it is too
general for being a Basic Law-Level format adapted
to the category of data we call “gestures”.
As for the type of the ‘gesture/motion data’
themselves, the various file formats are restricted to
position-like data (C3D allow recording other types,
but only within the very open ‘analog data’
sections). They do not natively include the
possibility to encode the type of the variables. They
are especially not adapted natively to the recording
of intensive variable.
4.6 Data Coding
Except for the C3D format, ASCII encoding is used
in the existing formats. This corresponds to the fact
that the frequency bandwidth of motion capture
systems and gesture controllers used to be on the
VLF range (from 10 to 300 Hz) and that recorded
gestures used to have a small number of DoF and
tracks (less than one hundred). Though, today, one
usually considers that the frequency bandwidth of
gesture signals may be of some kHz (especially
when dealing with force feedback gesture
interaction). In addition, the diversification of the
objects (real or virtual) producing motions, and the
decrease of the costs of sensors, imply that the
number of tracks to be stored is significantly
increasing. Consequently, gesture files may
correspond with amount of data far more important
than it had been considered so far, and ASCII
encoding is no more usable. Indeed, the use of a
binary format (like for sound, images or movies) is a
necessity for a generic gesture/motion format.
5 THE ™GMS FORMAT
On the basis of the previous analysis of gesture (or
more generally of motions usable as a command of
an evolving system), this section introduces the
proposed Low Level Gesture File Format. This
format is called ™GMS, which stands for “Gesture
and Motion Signals” - file extension is .gms.
5.1 Requirements for a Gesture File
5.1.1 Sampling Rate
First of all, a gesture signal is a signal sampled at the
necessary Shannon frequency. In the current 0.1
version, a unique sampling rate is used for all the
data in a GMS file. This choice does not correspond
to an optimal encoding, and will be reconsidered in
future versions.
5.1.2 Geometry and Structure Encoding
We then propose to organize the gesture data in four
levels at maximum: Tracks – Channels – Units –
Scenes :
• Gesture Track. The track i contains a
sampled monodimensional scalar a
i
(t) corresponding
to a single A-D track a(t), sampled at its Shannon
rate.
• Gesture Channels. Channels support the
geometrical dimensionality of gesture signal. A
Channel is composed of one or several tracks. A
Channel can be 1D0 (a pure scalar), 1Dx (a vector
on x axis), 1Dy, 1Dz, 2Dxy, 2Dyz, 2Dzy, or 3Dxyz.
A Channel can encode either “extensive variable
(EV)” i.e. homogeneous to spatial variables
(positions P, Angles A, velocities V, Accelerations
G) or “intensives variables (IV)”, i.e. homogeneous
to forces F.
• Gesture Units. Units are provided for
supporting the structural dimensionality of gestures.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
354
A unit is then composed of several channels in
which the signals are not dynamically independent,
whatever the way in which they are correlated is.
This differs from the structural properties of motion
capture formats that focus on tree-like structures.
The user can declare units freely. Along with
supporting a low-level structuring of the signal,
Units allow preventing non-relevant signal
processing in future uses of the data, for example
breaking of the correlation.
• Gesture Scenes. Finally, a scene is
composed of several units that are not – or can be
considered as not - dynamically linked.
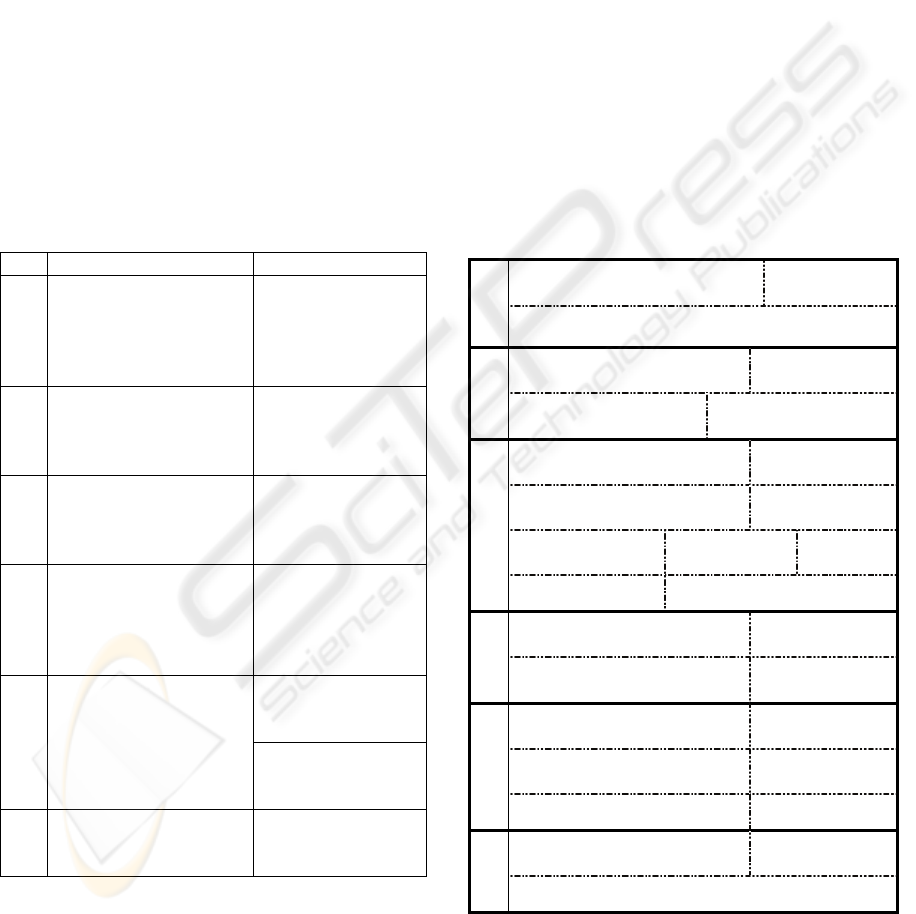
5.1.3 An Example
In table 2, we illustrate how a user could structure a
complex gesture scene like the one described in the
‘DESCRIPTION’ column.
Table 2: a possible structure for a gesture scene.
UNIT DESCRIPTION CHANNELS
Pianist
One musician plays with a
small keyboard composed
of 8 piano-like keys.
8 Mono dimensional
Channels“PianoKeys
”:
PK1 [EV(P), 1Dz], ...
, PK 8 [EV(P), 1Dz].
Stick
Source
Another one is controlling
the spatial position of a
sound source via a 3D
stick.
1 3Dxyz Channel
“SoundSource”:
SS [EV(P), 3Dxyz]
Light
Another one is controlling
the orientation of a light
source via a 2D force
sensor (a force pad).
1 2Dxy channel
“LightSource”:
LS [IV(F), 2Dxy]
Dancer
A dancer is equipped with
a motion capture system
of 16 3D points.
16 3Dxyz channels
“DancerPoints”:
DP1[EV(P), 3Dxyz],
..., DP16[EV(P),
3Dxyz]
1 3Dxyz channel
“Ball1”: BL1 [EV(P),
3Dxyz]
Juggler
A juggler is manipulating
a 6D force feedback ball
to play with a 6D virtual
racket.
1 3Drqf channel
“Ball2”:
BL2 [EV(A), 3Drqf]
Fluid
A virtual fluid of N 1D
masses acts on a virtual
string.
n 1D “fluidMass”:
FL [EV(V), 1D0]
5.2 ™GMS Format Implementation
This paragraph describes the current implementation
of the concepts developed previously. The
requirements have been implemented in the version
0.1 of the ™GMS gesture format, through a C/C++
read/write library, which is currently submitted to
file formats authorities, and as a MIME type.
The format is built above the IFF (Interchange
File Format) coding standard for binary files. A
description of this format can be found in (Morrison,
1985). IFF, and its equivalent RIFF, are largely used
by several formats as AIFF for sound files, AVI for
movie files, ILBM or GIFF for picture files.
As required by the IFF coding standard, data in
the proposed gesture file are encapsulated in
structures called chunks.
Table 3 presents a description of the data
contained in each of these chunks. The binary types
of those data are CHAR (a byte), USHORT (a 2
bytes unsigned integer), LONG or ULONG (a 4
bytes signed or unsigned integer), FLOAT32 or
FLOAT64 (a 4 or 8 bytes floating point number -
IEEE 754 standard). All the data covering more than
one byte in the file are encoded in BIG ENDIAN.
Table 3: description of the data contained in each chunk.
CHAR[4] chunkId = ‘FORM’
ULONG
fileSize;
Header
CHAR[4] fileType = ‘GSM ’
CHAR[4] chunkId = ‘VERS’
ULONG
chunkSize
Version
USHORT versNum
USHORT
subVersNum
CHAR[4] chunkId = ‘SCEN’
ULONG
chunkSize
USHORT sceneNameLength
CHAR*sceneNa
me
ULONG nbFrame FLOAT64 freq
USHORT
dataType
Scene
FLOAT64 scale ULONG blockSize
CHAR[4] chunkId = ‘UNIT’
ULONG
chunkSize
Unit
USHORT unitNameLength
CHAR*
unitName
CHAR[4] chunkId = ‘CHAN’
ULONG
chunkSize
USHORT chanNameLength
CHAR*
chanName
Channel
USHORT dimension USHORT type
CHAR[4] chunkId = ‘FRAM’
ULONG
chunkSize
Frame
TypeOfData[nbTrack][nbFrame] frames
The version chunk corresponds to the chunk
structure to be found in the file. Future evolutions of
the gesture file are foreseen.
A BASIC GESTURE AND MOTION FORMAT FOR VIRTUAL REALITY MULTISENSORY APPLICATIONS
355

The scene chunk contains information about the
gesture scene encoded in the file. dataType gives the
type of data of the signal. The current version
supports three type of data: FLOAT32, FLOAT64,
and LONG. scale is a scale factor to apply on the
signal. blockSize allows setting up an alignment of
the frames (ie: the gesture data) on multiple of
blockSize. This may be useful on some architecture
to process the file in real time. If blockSize is 0
(default), the size of a block equals to the size of a
frame.
The unit and channel chunks encode information
on a gesture/motion unit and channel. Channel and
unit chunks are interleaved: the current channel
belongs to the last declared unit. The dimension
integer encodes the dimension of the channel, and
accordingly its number of tracks. Dimensions
supported in version 0.1 are: 0D (pure scalar); a
vector on 1Dx (resp. 1Dy or 1Dz), on 2Dxy (resp.
2Dyz or 2Dzx), on 3Dxyz. type encodes the type of
the data. Current supported types are position, and
force.
The frame chunk contains the signal itself, given
frame by frame.
6 CONCLUSION
While gesture devices, especially haptic devices,
develop, while applications communicate more and
more though gesture-like data, the definition of a
low level gesture format can be seen as a major need
for the near future.
To do this, we extracted the specific properties of
gesture/motion signals over other temporal signals
(sounds and images): morphological versatility
(decomposed in geometrical and structural
properties), spatial and temporal ranges, and variety
of type of data. We showed that these properties are
able to explain why gestures can be considered as at
“a hub place” in multisensory situations and how
they can be shared by various applications. This led
to introduce a basic file format, able to encode all
the minimal and necessary features.
Various evolutions are foreseen, including:
• extending the format to multi-frequence gesture
stream; eventually, defining a set of standard
frequencies.
• extending the possible dimensions of channels,
especially to 6D; although the necessity of such
ND channels is not true evidence, and is still
under study.
• extending the supported types of data, including
for example displacement, velocities, angles,
torques, etc.
These extensions, though, require further
analysis for being exhaustive without damaging the
‘minimality’ and ‘simplicity’ of the proposed
format. Suggestions and comments will be welcome.
The proposed format has been used in physically
based multisensory simulators for synchronous
haptic interaction with computer animation and
sound synthesis, in hard and soft real-time, as well
as in separated physically-based animation
simulators and sound synthesis simulators.
Experiences for connecting the various systems
(computer animation, computer sound, multimodal
systems) through the proposed gesture format are in
progress in the laboratory.
ACKNOWLEDGMENTS
This work was supported by the FP6 Network of
Excellence IST-2002-002114 - Enactive Interfaces,
and by the French Ministry of Culture.
REFERENCES
(AOA,BVH,HTR) http://www.cs.wisc.edu/graphics/Cours
es/cs-838-1999/Jeff/{AOA,BVH,HTR}.html
(ASF) http://www.darwin3d.com/gamedev/acclaim.zip
(BRD,CSM)http://www.dcs.shef.ac.uk/~mikem/fileformat
s/{brd,csm}.html
(C3D) http://www.c3d.org
Herda, L., Fua, P., Plänkers, R., Boulic, R., Thalmann, D.,
2000. Skeleton-Based Motion Capture for Robust
Reconstruction of Human Motion. In Computer
Animation 2000 (CA00), p.77.
Luciani, A., Cadoz, C., Florens, J.-L., 1998. Towards a
complete representation by means of computer – the
instrumental communication interface concept. In
Cyberworld, Springer-Verlag, Tokyo.
Menache, A., 1999. Understanding Motion Capture for
computer animation and video games. Morgan
Kauffmann Ed., August 1999.
Meredith, Maddock, 2000. Motion capture file formats
explained. Departement of Computer Science
Technical Report CS-01-11, University of Sheffield.
Morrison, 1985. EA IFF 85 - Standard for interchange
format files - Electronic Arts,– available on Internet.
Smyth, M., Wing, A. 1984. The psychology of Human
movement. Academie Press.
Van Baerle, S., 2000. Motion Editing : Principles and
Practice. In 2000 Game Development Conference
Proceedings. March 20-24. San Jose, CA.
Note: Web addresses are provided for the file formats that
have not been precisely described in scientific
publications.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
356
