
SPHERE–TREES GENERATION AS NEEDED IN REAL TIME
Marta Franquesa Niub
´
o
Departament de Llenguatges i Sistemes Inform
`
atics
Universitat Polit
`
ecnica de Catalunya
Omar Rodr
´
ıguez Gonz
´
alez
Facultad de Ingenier
´
ıa
Universidad Aut
´
onoma de San Luis Potos
´
ı
Keywords:
Sphere-tree, collision detection, viewing volume, graphics hardware.
Abstract:
In this paper two improvements to speed up collision detection are described. Firstly, a method called oncollide
sphere-tree, OCST for short, is presented. This approach works by detecting collisions among models with
arbitrary geometry using the video cards Graphics Processing Units, GPU. While candidate parts of colliding
objects are being detected, the OCST is constructed for collision evaluation in parallel, at the same time. Thus,
the OCST is created in realtime. Secondly, we have tested two kinds of triangulated representation models for
the same originalobjects. We have evaluated trianglesoup and trianglestrip models to speed up the algorithm
response when computing collisions. The method has been described, implemented and tested for the two
kinds of triangulated models, and the obtained results are shown.
1 INTRODUCTION
Collision detection is a key problem in many areas
of computer graphics (Jimenez et al., 2001; Lin and
Manocha, 2003). Considered as a bottleneck within
real-time environments, several authors have studied
the detection of a collision and multiple solutions
have been proposed and published.
It is well known that to compute collision detec-
tion among several objects, a bounding easy–shaped
wrapper and hierarchies of them are created and used
to cover each involved scene–object. These wrappers
of simple shape allow us to compute intersections in
a quick way, discarding collision faster than using the
geometry of the original object models. The problem
that arises is the efficient managing of the wrapper hi-
erarchies. As the wrappers are usually called bound-
ing volumes (BV), the hierarchies are called BV–
trees. Examples of BV are axis–aligned–bounding–
boxes (AABB), oriented–bounding–boxes (OBB) and
spheres. The most solutions compute the trees in a
preprocessed step and, then, traverse them in a later
animation time. These approaches are cumbersome
and heavy to manage in the whole process. Thus, the
bottleneck of this solution lies in the time step when
the new levels of the tree are created, traversed and
updated. One of the most commonly BV–hierarchy
model used is the sphere–tree.
The hybrid collision detection (Kitamura et al.,
1994), refers to any collision detection method that
first performs one or more iterations of approxi-
mate test to study whether objects interfere in the
workspace and then, performs more accurate tests
to identify the object parts causing the interference.
Hubbard (Hubbard, 1995) reports two phases: the
broad phase, where approximate interferences are de-
tected, and the narrow phase where exact collision
detection is performed. O’Sullivan and Dingliana
(O’Sullivan, 1999; O’Sullivan and Dingliana, 1999)
extended the classification pointing out that the nar-
row phase consists of several levels of intersection
testing between two objects at increasing level of ac-
curacy (narrow phase: progressive refinement lev-
els) and, in the last level of accuracy, the tests
may be exact (narrow phase: exact level). Fran-
quesa and Brunet (Franquesa-Niub
´
o and Brunet,
2003; Franquesa-Niub
´
o and Brunet, 2004) divided the
broad phase in two subphases. In the first one, tests
are performed to find subsets of objects from the en-
tire workspace where collisions can occur, rejecting
at the same time, all the space regions where interfer-
ence is not possible (broad phase: progressive delimi-
tation levels). In the second subphase, tests determine
the candidate objects that can cause a collision (broad
phase: accurate broad level). Figure 1 summarizes
the complete hybrid collision detection pipeline in-
11
Franquesa Niubó M. and Rodríguez González O. (2006).
SPHERE–TREES GENERATION AS NEEDED IN REAL TIME.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 11-18
DOI: 10.5220/0001351600110018
Copyright
c
SciTePress
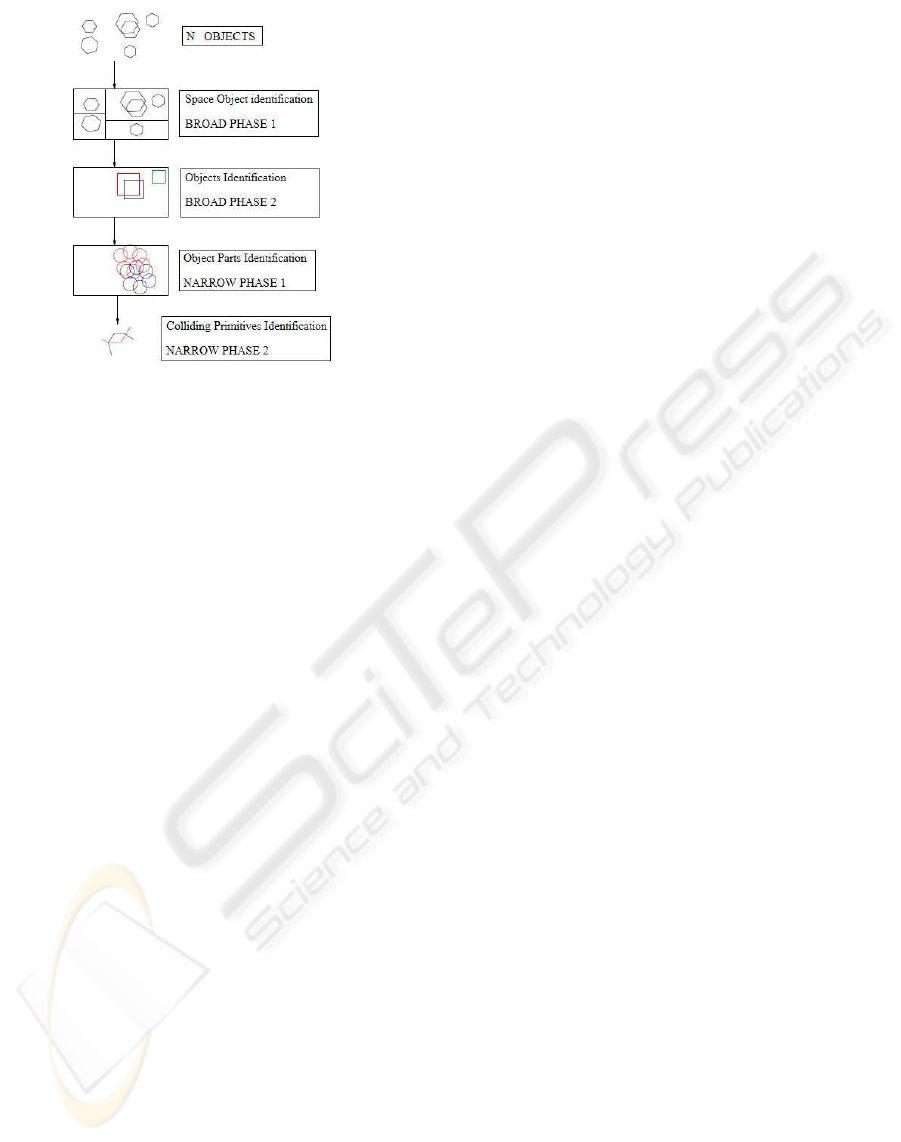
Figure 1: Collision detection pipeline.
cluding all its phases.
On–the–fly generation of the BV–tree is better than
pre–processing because the tree is updated when-
ever needed in real–time and memory is efficiently
managed. For some complex scenes, a scene hier-
archy has to be generated in a pre–processing step
and storing additional information about the bound-
ing volume. We have dicussed this goal and we pre-
sented a method named M Ktrees (Franquesa-Niub
´
o
and Brunet, 2004; Rodr
´
ıguez and Franquesa-Niub
´
o,
005c). BV–trees generation on the fly will not intro-
duce additional overhead during run time because it
is computed by using the GPUs.
In recent times, the availability of high perfor-
mance 3D graphics cards are common in personal
computers. The power and fastness of the built-in
Graphics Processing Units, GPU, and its own ded-
icated memory is being applied to a wider variety
of applications, even those that the creators did not
originally intend to manage. This paper describes
a hardwar–accelerated collision detection scheme.
Bounding sphere–trees are constructed on the fly us-
ing occlusion query extensions of modern GPUs.
In this paper, two improvements are described.
Firstly, a method called on-collide sphere–tree,
OCST, is presented. This approach works by detect-
ing collisions among models with arbitrary geome-
try using the video card’s GPU. While candidate parts
of colliding objects are detected, the OCST is con-
structed for collision evaluation in parallel, at the
same time. Thus, the OCST is constructed in real-
time. Secondly, we have tested two kinds of triangu-
lated models for the same original–objects. We have
evaluated triangle–soup and triangle–strip models to
speed up the algorithm response. A triangle–strip is
a list of triangles where each triangle shares two ver-
tices with the preceding triangle. The first three in-
dices of the list, define a triangle and then each ad-
ditional index defines another triangle by using the
two preceding indices. More detailed information can
be found in (Rodr
´
ıguez and Franquesa-Niub
´
o, 005a;
Rodr
´
ıguez and Franquesa-Niub
´
o, 005b).
As already mentioned, the whole structures involved
in the hybrid collision detection phases have usually
been computed as a preprocess to the simulation en-
vironment. Before entering the simulation, the struc-
tures must be loaded in core memory. We present an
algorithm that does not use precomputed BV hierar-
chical structures, but it uses instead an octree–based
sphere–tree created in real-time on needed. The de-
tection of surface overlapping over the sphere–tree
nodes is performed making use of occlusion queries
by exploiting the capacities of modern graphics hard-
ware. The algorithm is aimed at rigid objects moving
in large environments. The narrow phase of the hy-
brid collision detection problem is accelerated. When
many objects interact, main memory is managed more
efficiently than the other preprocessed approaches.
The access to secondary storage is improved when
out-of-core techniques are used.
2 RELATED WORK
A bounding volume hierarchy approximates a rep-
resentation of an object as a hierarchical structure,
known as bounding volume tree (BVtree). One of the
most used BVtrees in the literature is the sphere–tree
(Hubbard, 1993). A sphere–tree represents an ob-
ject by sets of spheres in a hierarchical way. Three
methods are commonly used for the construction of a
sphere–tree. The first one, consists of fitting spheres
to a polyhedron and shrinking them until they just
fit (Rourke and Badler, 1979). The second one is
based on an octree (Samet, 1990). Thus, the octree–
based sphere–trees (Hubbard, 1996; O’Sullivan and
Dingliana, 1999; Palmer and Grimsdale, 1995; Po-
bil et al., 1992) performs a recursive subdivision in
3D, creating spheres on child nodes that overlap the
surface of the object. And the third and last, the
medial-axis surface method (Bradshaw and OSulli-
van, 2003; Hubbard, 1995; Hubbard, 1996; Quinlan,
1994), uses Voronoi diagrams to calculate the object
skeleton placing maximal sized spheres on it so the
spheres fill the object.
The graphics-hardware-assisted collision detection
algorithms started with Shinya and Forgue (Shinya
and Forgue, 1991), and Rossignac et al. (Rossignac
et al., 1992). After them, a more efficient algorithm
was proposed by Myszkowski et al. (Myszkowski
et al., 1995) using the stencil buffer. Baciu and Wonk
(Baciu and Wonk, 1998) were the first to use common
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
12
available graphics cards to compute image–based col-
lision detection. Vassilev et al. (Vassilev et al., 2001)
use a technique for collision detection in deformable
objects like clothes. Kim et al. (Kim et al., 2003)
use graphics hardware to calculate Minkowski sums
to find the minimum translational vector needed to
separate two interfering objects. All those algorithms
involve no precomputation, but perform image-space
computations that require the reading back of the
depth or stencil buffer, which can be expensive on
standard graphics hardware.
Govindaraju et al. (Govindaraju et al., 2003) use
occlusion queries to compute a potentially colliding
set (PCS) in the broad phase, followed by exact colli-
sion in the narrow phase. Fan et al. (Fan et al., 2004)
use occlusion queries to fast detect collision between
a convex object and an arbitrarily shaped object. The
advantage of using GPU based occlusion queries is
that no read back of the depth or stencil buffer is nec-
essary to obtain results. This kind of tests are faster
than image-space computations.
As pointed out in (Kornmann, 1999), in order to
achieve high 3D graphics performance in many ap-
plications, it is essential to use triangle strips be-
cause they can greatly speed up the display of triangle
meshes. Triangle strips have been widely used for ef-
ficient rendering. It is NP-complete to test whether a
given triangulated model can be represented as a sin-
gle triangle strip, so many heuristics have been pro-
posed to partition models into few long strips. In the
literature we can find many approaches that treat the
problem to compute triangle–strips. There are several
programs available in the world wide web. One of
a common software is the STRIPE
1
. This software is
a tool which converts a polygonal model into trian-
gle strips and it is freely available for non commercial
use.
3 OCST REPRESENTATION
MODEL
To cover each candidate object for collision, octree–
based representation for sphere–trees construction is
used. As it is well known, an octree is a hierarchi-
cal structure obtained subdividing recursively in 3D
to form eight child nodes (Samet, 1990; Rodr
´
ıguez
and Franquesa-Niub
´
o, 005b). Each one can be repre-
sented with three colors. Black color for child nodes
completely inside the subdividing object. White for
child nodes completely outside. Grey for child nodes
in which the frontier of the object overlaps. Grey
nodes will be subdivided until a user–defined depth
for the octree is reached. When the octree depth
1
http://www.cs.sunysb.edu/ stripe
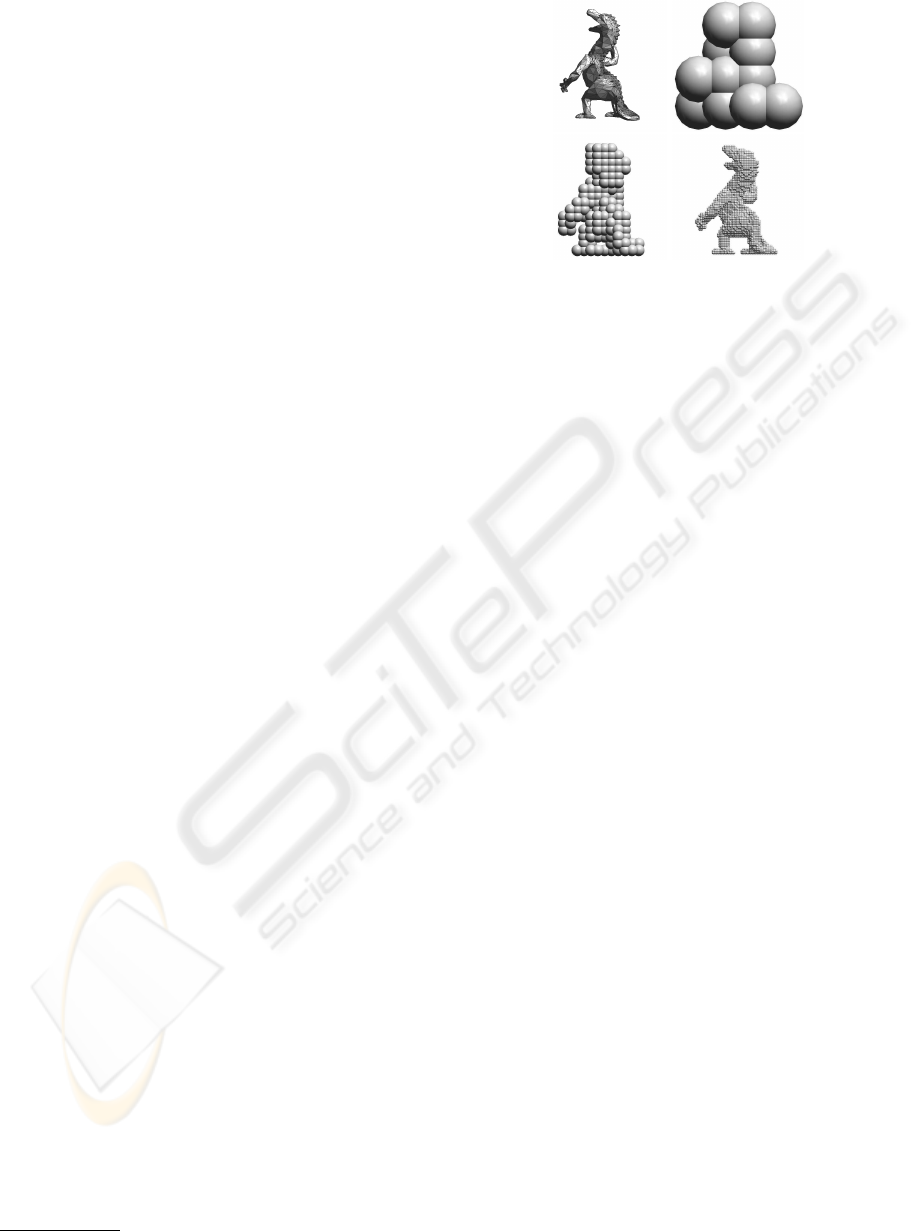
Figure 2: Original object and octree–based sphere–tree lev-
els 2, 4 and 6.
is reached, the grey nodes become leaf nodes. An
octree–based sphere–tree is an octree where each
node is bounded by one sphere instead of a cube. Fig-
ure 2 shows an octree–based sphere–tree representa-
tion of a dragon.
A conservative collision detection can be per-
formed by using a sphere–tree based on octrees, with
a certain depth level. The model gives enough prox-
imity to the object’s surface depending on the pre-
specified user–level.
The cost of creating sphere–trees can be high in
terms of computing resources. Space subdivisions re-
quire floating–point operations, which are generally
slow on CPU. The octree construction requires hav-
ing the geometry object loaded in core memory aside
the sphere–tree structure. Trying to create a sphere–
tree on simulation run-time cannot be achieved using
only the CPU. Therefore the construction of a sphere–
tree has been treated as a precomputation step to the
simulation. Having and maintaining all the sphere–
tree structures in core memory when many objects are
present, can be expensive during the life cycle of a
simulation.
From the BVtrees construction methods, the sim-
plicity of octree–based sphere–trees makes it good
enough to implement them using graphics hardware
(see section 4). The construction of sphere–trees in
real-time is performed using occlusion queries. Thus,
here, no precomputation is necessary, core memory
is free of hierarchical structures at the beginning of
the simulation because the sphere–trees are created
only on-collision when required. To preserve mem-
ory, only branches of the sphere–tree for the parts
of the objects that potentially can collide are com-
puted. Newly created branches are maintained in
core memory for future use during the simulation
(see section 5). As we will see in next sections, the
use of triangle–strips, instead of triangle–soups, to
model the scene–objects increases the efficiency of
the whole collision detection system computing the
wrapper model in real time whenever needed.
SPHERE–TREES GENERATION AS NEEDED IN REAL TIME
13

Figure 3: Occlusion queries: Some incoming object frag-
ment passes the depth test.
Figure 4: Occlusion queries: No incoming object fragment
passes the depth test.
4 OCST CONSTRUCTION
Different hardware designers have made several oc-
clusion test implementations with differences in per-
formance and functionality. In this way, we can dis-
tinguish three types of occlusion queries. The first
one
2
, returns a boolean answer indicating if incoming
object fragment passes the depth test (see Figure 3,
the occlusion query will return TRUE). The second
one
3
, returns the number of fragments that pass the
depth test and requires a previous boolean query to
be supported by the graphic card. Thus, two queries
have to be done to know the one answer. The third and
most standard, GL
ARB occlusion query
4
, is similar
to the last mentioned query, but it returns the samples
of object parts that occlude directly. It does not re-
quire the previous boolean query. Figure 4 shows a
case of no occluded object.
The GL
ARB occlusion query is used in our
method to avoid stalls in the graphics pipeline. This
query can manage multiple queries before asking for
the result of any one, increasing the overall perfor-
mance.
In what follows we describe how the oclusion
query works, and how our method uses of it. Let A
be an arbitrarily shaped object. An OCST root node
for A is constructed creating a box for A: AABB(A).
A bounding sphere for A is created bounding the
AABB(A), with its center as the center of the AABB
2
http://oss.sgi.com/projects/ogl-
sample/registry/HP/occlusion
test.txt
3
http://oss.sgi.com/projects/ogl-
sample/registry/NV/occlusion
query.txt
4
http://oss.sgi.com/projects/ogl-
sample/registry/ARB/occlusion
query.txt
Figure 5: Viewing volume construction: One of the three
viewing volumes and its camera position.
and its radius as half the distance of the AABB ex-
treme vertices: S(AABB(A)). Taking the AABB from
the root node of A, we construct a new level for the
OCST subdividing it in 3D. For each new child node,
a resulting octree subdividing AABB box is assigned
and an overlap test is performed to verify if it can be
a grey node. Occlusion computations are performed
to accelerate the overlap test for the detection of grey
nodes. These computations are based in the fact that,
if the surface of A can be viewed in at least some part
from inside the AABB of an octree node, then A is
overlapping the octree node and the node is marked
grey (see Figure 3). The overlap test performs one,
two or up to three occlusion queries, one for each of
the main axis.
Three requirements are needed for each occlusion
query (See Figure 5): A viewing volume, a camera
position and the occlusion test elements. The viewing
volume is created using an orthographic frustum view
limited by the AABB box of the octree node tested.
The camera position is placed outside the viewing
volume, centered at a box face, looking toward the
box in parallel to a main axis, and with a distance
equal to the length of the box in the looking direc-
tion. The first occlusion test element (the occluder),
is the AABB box of the octree node. The second oc-
clusion test element (the possibly occluded objects),
is the surface of A .
An occlusion query reports if one or more occlud-
ers allow the possibility that occluded objects can be
seen from inside a viewing volume. In other words,
if the surface of A can be seen from inside the AABB
box (viewing volume) of the tested octree node, in at
least one of the three main axis, then the surface of A
is overlapping that octree node. If the number of sam-
ples that passed the occlusion query is greater than
zero in at least one of the three queries (for x, y and z
axis), then the surface of A overlaps the tested OCST
node and it it is marked grey. In this case, a sphere
is created bounding the AABB box of the node and is
inserted on the OCST structure.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
14

Figure 6: Spheres A and B collide iff d ≤ R
A
+ R
B
, where
d = |C
B
− C
A
|.
5 OCST AND REAL-TIME
COLLISION DETECTION
To achieve collision detection in real-time, OCST
branches are constructed for objects only when it is
needed. Thus, to initialize the animation system it
is only required to load the geometry of the objects
into graphics card’s memory, and construct a root
OCST for each of them at the beginning of the sim-
ulation. The OCST root is initialized with an AABB
and a bounding sphere with the center as the center of
the AABB, and its radius as half the distance of the
AABB extreme vertices.
Let A and B be arbitrarily shaped objects in move-
ment. The two objects collide with each other only, if
the distance between their root sphere centers is equal
or less than the sum of their respective radius (See
Figure 6). When a collision occurs, one level is con-
structed for the OCST for objects A and B. If child
nodes of object A collide with child nodes of object B,
an additional level is constructed only for the collid-
ing child nodes. This process continues up to a user–
defined depth for the OCST (in our experiments the
maximum depth level has been selected from: 5, 6
and 7). When the depth value is reached, and two leaf
nodes collide, a collision between object A and B is
reported. Using a bigger depth value, the approxima-
tion to the object surface is tighter, and the collision
detection is more accurate.
All hierarchies sphere centers must be updated with
the objects in movement. When a new level for the
OCST is created the number of updates increases.
With a big user–defined depth value the maintaining
cost of updating all the animation OCSTs is higher.
To found the potentially colliding set, PCS, the sphere
interference test described below is used. A list with
pair–colliding spheres is computed and used to iden-
tify interfering object parts. In large environments
(Franquesa-Niub
´
o, 2004; Rodr
´
ıguez and Franquesa-
Niub
´
o, 005c), the PCS can be obtained using algo-
rithms designed for the broad phase of the hybrid col-
lision detection problem.
To increase the algorithm performance, the
branches of the OCST created by older collisions are
kept in core memory. These can be re-used on forth-
Figure 7: Two examples of input data models. Top: Cow
and Bunny modeled by triangle–soup, with 5144 and 5110
triangles respectively. Down: Same input objects modeled
by using triangle–strips.
coming collision tests. To avoid the problem of a high
computing resource cost caused for hierarchies up-
dates, a time-stamp is assigned to the deeper OCST
nodes. If a complete OCST level does not participate
in a collision during a certain amount of time, it is
deleted from core memory and the parent initialized
with its own time-stamp. This will cause an object to
get back to its initial state (only the OCST root node
is kept), if it is not involved in any more collisions
during a certain amount of time (This is the case of
the Cow and the Dragon of Figure 8).
6 EXPERIMENTAL RESULTS
In this section some relevant results of applying our
method are exposed. To compare the actual re-
sults with existing others, the input data tested in
other existing algorithms has been selected. Expla-
nations about simulations and results can be found
in (Rodr
´
ıguez and Franquesa-Niub
´
o, 005a). The al-
gorithms have been implemented on a Dell Inspiron
notebook with ATI Mobility Radeon 9600 graphics
card with 128 MB VRAM and a Pentium M proces-
sor at 1.80 GHz. The algorithms were tested with
commonly used complex models
5
. Figure 7 shows
the models used.
6.1 OCST Construction Timings
The time to construct one level of an OCST is ex-
posed in Table 1. This time is equal for the two
models used, triangle–soup and triangle–strips. The
results are obtained with the objects already loaded
in graphics card’s memory as triangles regardless of
with the kind of triangulation chosen, triangle–soup
5
http://isg.cs.tcd.ie/spheretree/
SPHERE–TREES GENERATION AS NEEDED IN REAL TIME
15
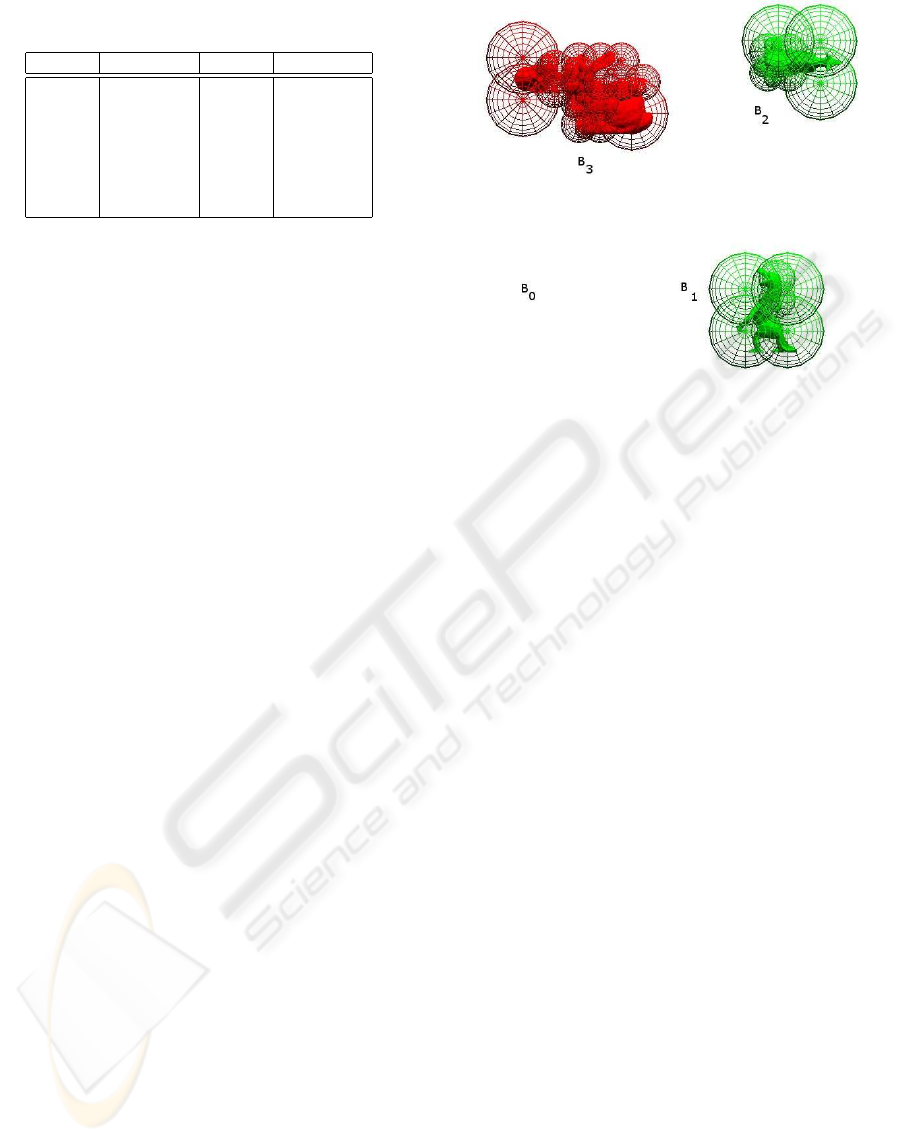
Table 1: OCST construction time.
Model Triangles Time Occlusion
Dragon 1496 0.0099 13
Bunny 1500 0.0099 9
Cow 1500 0.0099 9
Lamp 600 0.0199 13
Dragon 5104 0.0199 13
Bunny 5110 0.0099 9
Cow 5144 0.0099 9
or triangle–strip. The Table shows the number of tri-
angles for each model, the time used to construct the
level (in seconds) and the number of occlusion tests
performed.
The complete model has to be rendered for each oc-
clusion test. Note that the object’s geometry does not
affect the time of constructing one OCST new level.
The algorithm performance is affected only for the
number of occlusion tests and the time each one lasts.
Therefore, the worst case only occurs when all occlu-
sion tests have to be considered, for all the nodes and
axis. In this case, with eight possible child nodes and
three tests per each one, for a total of 24 occlusion
tests, the maximum experimented time has resulted
equal to 0.03 seconds. For the simplest model the
construction of an OCST level using only the CPU
can take from 0.03 seconds, 0.1 to 0.5 seconds for
the intermediate models, and 1 second or more for
the largest models. Without the use of the GPU for
the construction, the object’s geometry does indeed
affect the algorithm performance. The optimizations
such as triangle–strips have proved useful to accel-
erate the render of the complete model. Therefore,
using triangle–strips is faster for the OCST construc-
tion, as it is shown by the results in the next section.
6.2 OCST Collision Detection
Performance
The algorithms were tested with a scenario where one
object follows a fixed trajectory in a 3D space. Col-
lision occurs among the other three objects. Figure 8
shows a snapshot of an example of collision simula-
tion: The initial location of the Bunny is B
0
. Then
following a trajectory, it passes through B
1
, B
2
, and
B
3
(place where the snaptshot has been taken). In B
1
the Bunny collided with the dragon, in B
2
the Bunny
collided with the Cow and in B
3
the Bunny is col-
liding with a lamp. While the collision is being de-
tected, new levels of the respective objects trees are
generated. When the collision is false, the tree is go-
ing up to the root node, deleting all the nodes. This
last reason is the key why the dragon and the cow are
sorrounded by big spheres, because the trees are go-
Figure 8: Example of a collision detection fragment anima-
tion: Snapshot where one object, the Bunny is moving and
the other three objects are still.
ing up. Table 2 and Table 3 show the performance for
the animation, and the time taken to finish it. The ta-
bles use triangle–soup and triangle–strip respectively
to render the models and represent the same anima-
tion. In the two situations, a user–defined depth level
for the OCST equal to 5 is used. The results are mea-
sured in frames–per-second (FPS). The number of oc-
clusion queries performed in each time step is also
shown. Comparing the results exposed in the tables,
we can conclude that the use of triangle–strips is bet-
ter than the use of triangle–soups. Note for example
the number of frames per second at 4 sec. of the ani-
mation time, with 694 occlusion queries for triangle–
soup and 690 queries for triangle–strip and the FPS is
245.75 in the first case and 297.70 in the second case.
Then the better ratio of FPS, indicates better results
for triangle–strips.
Looking at Table 2 and Table 3 and taking into ac-
count that the simulation trajectory was the same
in both cases, the time of the whole animation for
triangle–soup was equal to 8.582 sec, while for
triangle–strip was 7.360 sec.
FPS slowed down only, when new levels for the
OCSTs are generated. Although the speed of the
FPS gets lower, the rate keeps on being good enough.
Therefore, the animation can be maintained over 60
FPS and allows a smooth transition between frames
in visual terms.
The worst case occurs when objects are moving
very fast and a straight collision occurs. This situa-
tion can cause several levels of the OCST tree have
to be constructed at once for each colliding object. In
this case, the performance could slow down. Even so,
stalls in the animation can occur, only, if the user–
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
16
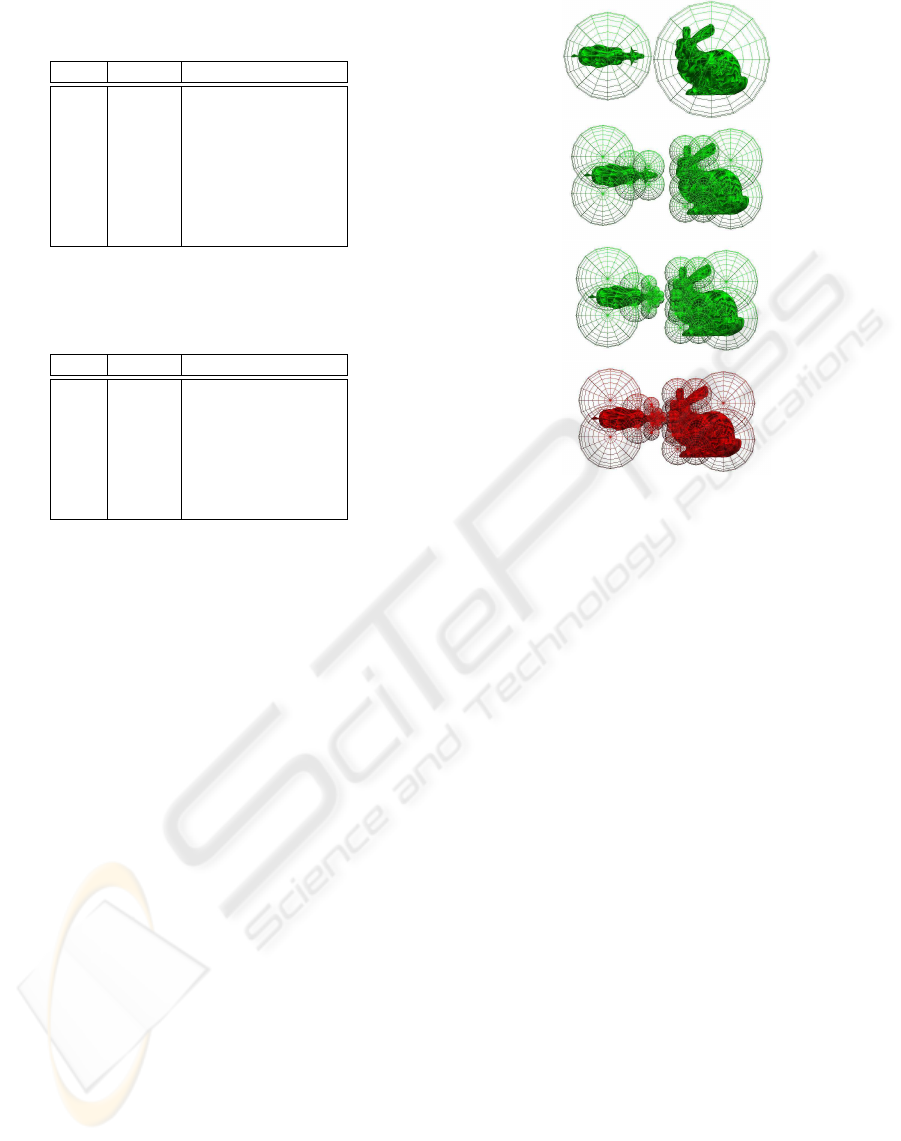
Table 2: Animation performance using triangle–soup mod-
els. Total animation time: 8.582 sec.
Time FPS Occlusion queries
1.00 177.64 198
2.00 244.76 700
3.00 274.45 316
4.00 245.75 694
5.00 264.47 490
6.00 283.72 294
7.00 294.71 182
8.00 268.46 754
Table 3: Animation performance using triangle–strip mod-
els. Total animation time: 7.360 sec.
Time FPS Occlusion queries
1.00 232.53 240
2.00 278.72 832
3.00 325.35 372
4.00 297.70 690
5.00 310.38 532
6.00 348.65 208
7.00 311.69 884
defined depth value is too high. Even though, these
stalls are due to the high number of occlusion tests
that have to be performed to construct all the OCST
branches, the running time is not affected when real-
time simulations are computed.
Figure 9 shows the sequence of a collision between
two objects, modeled by using triangle–strips, with
the OCSTs created in real-time up to level 5. The red
colour indicates that a collision has been detected.
7 CONCLUSIONS
In this paper, two collision detection improvements
are described. Firstly, a new method that has been
conceived to speed up the collision detection pipeline
has been introduced. Its application in real-time en-
vironments has been implemented using OCST. The
method is fast enough to manage collision detection
in real-time, as it can be seen from the experimen-
tal results exposed. The speed and efficiency ob-
tained with our method enables us to manage many
concurrent objects in a scene. Secondly, we have
tested two kinds of triangulated models for the same
set of original objects: triangle–soup and triangle–
strip. Triangle–strip are shown to be better model in
terms of sphere–tree time computing. And, as a con-
sequence, they are better when computing collision
detection.
The method’s limitations are related to hardware
constrictions. The overall performance is affected
Figure 9: OCST creation up to level 5.
by several parameters. The amount and speed of
the video memory built–in the graphics cards, the
bus transfer speed and the clock frequency of the
GPU. Other existing methods that use out-of-core al-
gorithms in real-time could be degraded at reading
time from secondary storage, and at sending time of
the object’s geometry to the graphic card memory.
The amount of the model representation to be
generated is reduced with the use of OCST, while
decreasing considerably the collision detection time
without loss of accuracy.
We have detailed here, an algorithm related to the
narrow phase of the collision detection pipeline prob-
lem. However, work related to the broad phase can
be found in (Franquesa-Niub
´
o, 2004; Rodr
´
ıguez and
Franquesa-Niub
´
o, 005c). We are working on bringing
together both methods, so a fully functional fast col-
lision detection system for large environments could
give us better results on our application environments.
ACKNOWLEDGEMENTS
This research has been partially supported by the
projects MAT2002-0497-C03-02, MAT2005-07244-
C03-03, the network IM3 from the spanish govern-
ment, by the CREBEC, from the catalan government
and by the Facultad de Ingenier
´
ıa de la Universidad
Aut
´
onoma de San Luis Potos
´
ı under the PROMEP
program.
SPHERE–TREES GENERATION AS NEEDED IN REAL TIME
17

REFERENCES
Baciu, G. and Wonk, S. (1998). Recode: An image-
based collision detection algorithm. In Proc. of Pacific
Graphics, pages 497–512.
Bradshaw, G. and OSullivan, C. (2003). Adaptative me-
dialaxis approximation for spheretree construction.
ACM Transactions on Graphics, 22(4).
Fan, Z., Wan, H., and Gao, S. (2004). Simple and rapid
collision detection using multiple viewing volumes. In
VRCAI 04: Proceedings of the 2004 ACM SIGGRAPH
international conference on Virtual Reality continuum
and its applications in industry, pages 95–99. ACM
Press.
Franquesa-Niub
´
o, M. (2004). Collision Detection in Large
Environments using Multiresolution KdTrees. PhD
thesis, Universitat Polit
`
ecnica de Catalunya.
Franquesa-Niub
´
o, M. and Brunet, P. (2003). Collision de-
tection using MKtrees. In Proc. CEIG 2003, pages
217–232.
Franquesa-Niub
´
o, M. and Brunet, P. (2004). Collision pre-
diction using MKtrees. In Scopigno, R. and Skala, V.,
editors, WSCG 2004, The 12th International Conf. in
Central Europe on Comp. Graphics, Visualization and
Comp. Vision 2004, volume 1, pages 63–70. Plzen.
ISSN 1213-6972.
Govindaraju, N. K., Redon, S., Lin, M. C., and Manocha,
D. (2003). Cullide: interactive collision detection be-
tween complex models in large environments using
graphics hardware. In HWWS 03: Proceedings of
the ACM SIGGRAPH/EUROGRAPHICS conference
on Graphics hardware, pages 25–32. Eurographics
Association.
Hubbard, P. M. (1993). Interactive collision detection. In
Proc. IEEE Symp. on Research Frontiers in Virtual
Reality, volume 1, pages 24–31.
Hubbard, P. M. (1995). Collision detection for interactive
graphics applications. IEEE Transactions on Visual-
ization and Computer Graphics, 1(3):218–230.
Hubbard, P. M. (1996). Aproximating polyhedra with
spheres for timecritical collision detection. ACM
Transactions on Graphics, 15(3):179–210.
Jimenez, P., Thomas, F., and Torras, C. (2001). (3d) colli-
sion detection: A survey. Computers and Graphics,
25(2):269–285.
Kim, Y. J., Otaduy, M. A., Lin, M. C., and Manocha, D.
(2003). Fast penetration depth estimation using ras-
terization hardware and hierarchical refinement. In
SCG 03: Proceedings of the nineteenth annual sym-
posium on Computational geometry, pages 386–387.
ACM Press.
Kitamura, Y., Takemura, H., Ahuja, N., and Kishino, F.
(1994). Efficient collision detection among objects in
arbitrary motion using multiple shape representation.
In Proceedings 12th IARP Inter. Conference on Pat-
tern Recognition, pages 390–396.
Kornmann, D. (1999). ”fast and simple triangle strip gener-
ation”. VMS Finland, Espoo, Finland. Color Plates.
Lin, M. and Manocha, D. (2003). Handbook of Discrete and
Computational Geometry Collision Detection, chap-
ter 35. CRC Press LLC. To appear.
Myszkowski, K., Okunev, O. G., and Kunii, T. L. (1995).
Fast collision detection between computer solids us-
ing rasterizing graphics hardware. The Visual Com-
puter, 11.
O’Sullivan, C. (1999). Perceptually-Adaptive Collision De-
tection for Real-time Computer Animation. PhD the-
sis, University of Dublin, Trinity College Department
of Computer Science.
O’Sullivan, C. and Dingliana, J. (1999). Real-time collision
detection and response using sphere-trees. In 15th
Spring Conference on Computer Graphics. ISBN: 80-
223-1357-2.
Palmer, I. and Grimsdale, R. (1995). Collision detection
for animation using sphere–trees. Computer Graphics
Forum.
Pobil, A. D., Serna, M., and Llovet, J. (1992). A
new representation for collision avoidance and detec-
tion. In IEEE Int. Conf. on Robotics and Automation
(Nice)(France), volume 1, pages 246–251.
Quinlan, S. (1994). Efficient distance computation between
nonconvex objects. In Proceedings of the IEEE Int.
Conf. on Robotics and Automation, pages 3324–3329,
San Diego, CA.
Rodr
´
ıguez, O. and Franquesa-Niub
´
o, M. (2005a). A new
gpu based sphere-tree generation method to speed
up the collision detection pipeline. Technical report,
Software Dept. LSI. U.P.C. Ref: LSI-05-45-R. http:
//www.lsi.upc.edu/dept/techreps/techreps.html.
Rodr
´
ıguez, O. and Franquesa-Niub
´
o, M. (2005b). A new
sphere-Ttree generation method to speed up the colli-
sion detection pipeline. In Proceedings of CEIG’05,
September 2005. Granada. Spain.
Rodr
´
ıguez, O. and Franquesa-Niub
´
o, M. (2005c). Hierar-
chical structuring of scenes with MKTrees. Technical
report, Software Dept. LSI. U.P.C. Ref: LSI-05-4-R.
http://www.lsi.upc.edu/dept/techreps/techreps.html.
Rossignac, J., Megahed, A., and Schneider, B.-O. (1992).
Interactive inspection of solids: cross–sections and in-
terferences. In SIGGRAPH 92: Proceedings of the
19th annual conference on Computer graphics and in-
teractive techniques, pages 353–360. ACM Press.
Rourke, J. and Badler, N. (1979). Decomposition of three-
dimensional objects into spheres. IEEE Transactions
on Pattern Analysis and Machine Intelligence, PAMI-
1(3):295–305.
Samet, H. (1990). The Design and Analysis of Spatial Data
Structures. Addison–Wesley. ISBN 0–201–50255–0.
Shinya, M. and Forgue, M. (1991). Interference detection
through rasterization. Journal of Visualization and
Computer Animations, 2:131–134.
Vassilev, T., Spanlang, B., and Chrysanthou, Y. (2001).
Fast cloth animation on walking avatars. In Computer
Graphics Forum, volume 20(3), pages 260–267.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
18
