
SOME SPECIFIC HEURISTICS
FOR SITUATION CLUSTERING PROBLEMS
Boris Melnikov, Alexey Radionov
Department of Mathematics and Information Science, Togliatti State Univ., Belorusskaya str., 14, Togliatti, 445667, Russia
Andrey Moseev, Elena Melnikova
Department of Telecommunication Software, Ulyanovsk State Univ., L.Tolstoy str., 42, Ulyanovsk, 432700, Russia
Keywords: Discrete optimization problems, Multi-heuristic approach, Clustering situations.
Abstract: The present work is a continuation of several preceding author's works dedicated to a specific multi-
heuristi
c approach to discrete optimization problems. This paper considers those issues of this multi-
heuristic approach which relate to the problems of clustering situations. In particular it considers the issues
of the author’s approach to the problems and the description of specific heuristics for the problems. We give
the description of a particular example from the group of “Hierarchical Clustering Algorithms”, which we
use for clustering situations. We also give descriptions of some common methods and algorithms related to
such clustering. There are two examples of metrics on situations sets for two different problems; one of the
problems is a classical discrete optimization problem and the other one is a game-playing programming
problem.
1 INTRODUCTION AND
PRELIMINARIES
This paper is a continuation of several preceding
authors’ works dedicated to a specific multi-
heuristic approach to discrete optimization problems
(DOPs). We should mark that the given list of
literature consists almost only of the works of the
present paper’s authors. First of all it is caused by
the fact that the authors did not meet publications
about application in discrete optimization problems
of all the heuristics simultaneously. Among those
works we would mark separately the following:
• descri
ption of the approach to DOPs in general
(Melnikov, 2005; 2006);
• descri
ption of specific heuristics for particular
DOPs (
Belozyorova and Melnikov, 2005; Melnikova
and Radionov, 2005;
Melnikov, Radionov, and
Gumayunov, 2006);
• descri
ption of heuristics for game-playing
programs (
Melnikov and Radionov, 1998; Melnikov,
2001;
Melnikov, Radionov, Moseev, and Melnikova,
2006
).
However this division is mostly conventional
because each of those
papers contains partitions and
heuristics concerning any of the three areas
mentioned. The object of each of DOPs is
programming anytime algorithms, i.e., the
algorithms, which can provide a near-to-optimal
solution in real time.
The considered DOPs will be briefly (and two of
th
em quite properly) described in this paper. Here in
the Introduction we will very briefly describe the
approaches or actually the heuristics of the
mentioned multi-heuristic approach; the text is given
according to (Melnikov, 2005). So, the methods of
solution of DOPs are constructed on the basis of
special combination of some heuristics, which
belong to different areas of the theory of artificial
intelligence. Firstly, we use some modifications of
truncated branch-and-bound methods (TB&B);
moreover in this paper we will frequently refer to
TB&B. Secondly, for the selecting immediate step
of TB&B using some heuristics, we use dynamic
risk functions. Thirdly, simultaneously for the
selection of coefficients of the averaging-out, we
also use genetic algorithms. Fourthly, the reductive
272
Melnikov B., Radionov A., Moseev A. and Melnikova E. (2006).
SOME SPECIFIC HEURISTICS FOR SITUATION CLUSTERING PROBLEMS.
In Proceedings of the First International Conference on Software and Data Technologies, pages 272-279
DOI: 10.5220/0001317002720279
Copyright
c
SciTePress

self-learning by the same genetic methods is also
used for the start of TB&B.
In this paper we consider those issues of the
multi-heuristic approach to DOPs which are
connected with the problems of clustering (or
classifying; here we do not consider the difference
between these two terms for in the considered
problems they have the same meaning) situations,
actually with the author’s approach to those
problems, with description of the heuristics specific
for those problems, and with applying the
corresponding methods. Let us mention two works
which became classical. The first one is about usage
of clustering algorithms in artificial intelligence
problems, see in (Lifschitz, 1990). The second one is
a classical work on solving problems “by analogy”
(in author’s opinion this subject is quite popular
nowadays), see in (Carbonell, 1983)..
Section 2 of this paper contains the description of
an example from the group of “Hierarchical
Clustering Algorithms”; the authors find this variant
of algorithm the most efficient for the considered
problems of situations clustering in application to AI
problems and some empirical confirmations of this
fact are given below. The authors apply this
algorithm to problems in other areas (for more detail
see Section 2).
In any case a problem of clustering rather often
demands development of a specific metric.
Moreover when we fix a concrete algorithm of
clustering (independent of any particular metric) we
can say that “if there is a metric then there is a
clustering” and we do not simplify the situation too
much. In our case we need to develop metrics on
situation sets and two examples of that are
considered in Sections 3 and 4 of this paper. One of
the problems is a classical discrete optimization
problem and the other one is a game-playing
programming problem.
Section 5 contains descriptions of some common
methods and algorithms related to clustering. We
apply these algorithms to different DOPs, both
classical and intellectual game-playing
programming.
Some practical results of usage of our programs
in two descrete optimization problems (minimization
of non-deterministic finite automata and DNF) are
mentioned in conclusion (Section 6). The programs
contain implementations of all the heuristics
described in this paper and in the previous
publications of the authors. We can note in advance
that the results of our programs execution are purely
comparable to the best programs of other developers
(found in the Internet and others).
2 AN EXAMPLE
The following Section describes an example from
the group “Hierarchical Clustering Algorithms”,
applied by the authors in a number of DOPs. Let us
give a mathematical description of this algorithm.
We should note in advance, that here appear a lot of
problems, connected with building the most efficient
variants to carry out this very variant – however, we
are not going to study these problems in the present
article.
So, let R
ij
be the minimal distance between the
elements of clusters numbered i and j, and r
i
be the
maximal distance between the elements of cluster i.
Common algorithms of clustering and algorithms of
its quality evaluation generally use the values
where f and g are specific increasing functions
(chosen depending on a particular problem,
particular algorithm and so) and i and j take on all
possible values. First of all we mean different
variants of algorithms from the group of
“Hierarchical Clustering Algorithms”. For example
see the site
http://www.elet.polimi.it/
upload/matteucc/Clustering/ and also the
information that can be found by links from this site.
As distinct from common algorithms the authors
use the same formula but with other meanings of r
i
values. In particular let:
• i be the considered cluster,
• m
1
,...,m
n
be all its elements,
• l
mn
be the distance between its elements m and n,
• (M
1
,..., M
N
) be some finite sequence consisting
of the cluster’s elements m
1
,...,m
n
and including
each of them at least once.
Then we consider
Note that although the given definition is not an
algorithm the simplest possible algorithms of
calculating r
i
values built on its base are not difficult.
There are some differences between implementation
of these algorithms and the common ones (i.e.,
implementation of the algorithms which can be
found by the links on the site mentioned before) but
we will not concentrate on those differences.
(Actually those differences could be the subject of a
separate publication, which practically would not be
related to the present paper. One of those differences
is concluded in the following: we step by step
increase the criteria of combining two clusters into
SOME SPECIFIC HEURISTICS FOR SITUATION CLUSTERING PROBLEMS
273

one, i.e., lowering the clustering threshold with help
of a specific auxiliary algorithm which uses
precomputed distances defined on the current
clusters.) As it was mentioned above, there can be
found some interesting problems focused on
efficient realization of this algorithm variant.
However we will not study these problems in the
article either. Instead of considering such
algorithmic problems we are going to approve
empirically the expediency of using this algorithm in
the considered DOPs.
Thus we have shown a formal description of one
specific clustering algorithm. As it was mentioned in
Introduction the authors suppose that one of its
applications could be the problem of forming the
initial screen when searching in the Internet. In
(Melnikova and Radionov, 2005), two different
possible variants of using this algorithm in such a
problem are given and a preliminary version of
search engine was developed basing on this
approach. However here we are more concerned
about another possible application area of the
algorithm and this area is discrete optimization
problems.
The following question may arise: why do we
need this very algorithm, what makes it better than
the other ones described above? (Another question
may arise why in our case we need to solve
problems “by analogy” though the goal of each
anytime-algorithm is in achieving one pseudo-
optimal solution. A possible answer to this question
is given in Section 5 of this paper.) It is impossible
to give the exact answer, as it always seems in case
of heuristics. But practical programming and the
solution of several DOPs has shown that this
algorithm is the best to illustrate possible locations
of situations. Here we mean the situations both for a
certain DOP and for game-playing programs. We
attempt to focus on situations not only within one
cluster, but also in an order which corresponds to the
possible sequence (M
1
,…M
n
) in the formulae above
and what is more important to the selection of the
situations which are included more than once in into
this sequence (let us call them key situations).
Situations are sorted in the given way for ordered
processing of the situations, for solving the
corresponding subtasks in a similar order, and we
certainly start with the key situations. (We mark in
advance that our vision of the term subtask will bee
defined more exactly in the next section.) By such
situations sorting we achieve successful solving of
problems “by analogy” because the situations which
are close in a “good” metric most likely have similar
solutions. Here we first have in mind the possibility
to make the same step in TB&B. And not just
possibility to make the same step, but heuristic
choice and receiving the same separating element for
such step in two subtasks close in the metric.
So the authors hope that they have given the answer
to the possible question about necessity of using the
described algorithm of clustering in different DOPs.
And as it was mentioned above to do clustering with
help of this algorithm we need to find a metric on
the situations set (subtasks set). The following two
Sections of the paper are dedicated to description of
such metrics for two different DOPs.
3 METRICS FOR SITUATIONS IN
ONE PROBLEM
In this section we give a metric for the problem of
vertex minimization in nondeterministic finite
automata of Rabin-Scott. However the authors leave
this title of the section because in principle similar
heuristics can be applied to quite different discrete
optimization problems.
Let us explain the task setting (for more details
see (Melnikov, 2000) and others). Some matrix is
filled with numbers 0 and 1 (in terms of (Melnikov,
2000), numbers 1 correspond to elements of binary
relation #). Let us use the term Grid for any couple
of subsets of columns and rows of the matrix if those
subsets meet the following two conditions:
• at the intersection of each column with each row
of those subsets 1 is placed;
• we can not add any row or column to those
subsets without breaking the first condition.
In the set of all possible grids we need to find a
subset which includes all 1s of the given matrix.
And to reach the requirement of vertex minimization
in nondeterministic finite automata we should find
that one of the subsets which contains the minimal
number of grids in it. (One description of the
sufficient requirement is given in (Polák, 2004).
Besides in present time the authors of the paper are
preparing a publication with a description of such
algorithm based on description of the set of all
possible arcs of an automation, which is given in
(Melnikov, and Sciarini-Guryanova, 2002). To be
more specific it is based on presence of analogues of
all these arcs in the given automation. However here
we consider only the requirement of vertex
minimization so there is no need to consider arcs and
each grid is a special description of an automation
state.)
We can demonstrate that the problem is not trivial
by showing the following simple example. As usual
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
274
for such examples it is specially designed to make
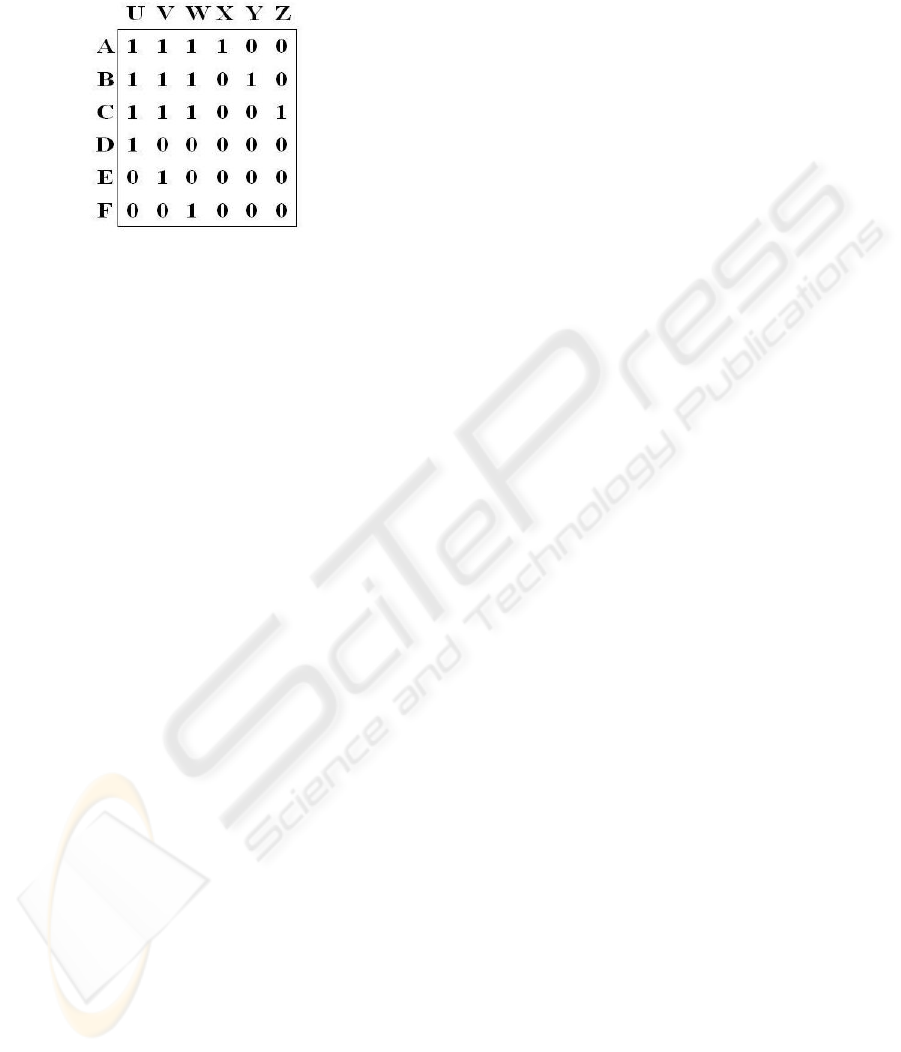
greedy algorithms inefficient. So, let the initial
matrix be set by the Fig.1.
Figure 1: Initial Matrix.
Then the optimal solution does not contain the
maximal grid, i.e. the grid of columns U, V, and W
and rows A, B and C. Optimal solution consists of
the tree single-row grids (the same A, B and C but
now each of them contains all available 1) together
with three similar single-column grids. Obviously
real tasks are much more complex but as for smaller
tasks this one is quite interesting.
Now we are going to consider some different
metrics but first we need to explain some general
notations. Let X and Y be some sets, n=|X∩Y| be the
number of elements in their intersection, N=|XUY|
be the number of elements in their union. Then we
will write Ω(X,Y)=1–n/N.
Let us consider the heuristic for definition of a
metric on the grids set. (We suppose that any
possible metric should deliver value of 0 if the grids
are totally the same and value of 1 if the grids have
no common elements, i.e. common matrix cells
filled with 1.) As a result of practical programming
including testing of several alternatives we have
found that the following heuristic is the most
efficient for the problem. Let X
1
and X
2
be sets of
the numbers of the grids’ rows 1 and 2, Y
1
and Y
2
be
the same sets for the columns. Then we will use the
following value as a metric
(α·Ω(X
1
,X
2
)+ (1– α)·Ω(Y
1
,Y
2
)),
where α is some coefficient to be adjusted with help
of genetic algorithms. (Actually it also depends on
the number of elements in the mentioned arrays, but
we do not discuss genetic algorithms in this paper.)
Obviously if the grids are the same then we get 0.
Though we do not always get 1 if the grids have no
common cells with value of 1, nevertheless the given
metric is quite efficient for the considered problem.
Now let us consider possible heuristics for definition
of a metric on the subtasks set. To do this we need to
define more exactly what is subtask (though we will
not give the complete definition, it is just
impossible) and first let us show fragments of the
corresponding programs in C++, containing
descriptions of task and subtask. Here we reach two
goals at the same time: firstly we show a possible
variant of implementation of the approach to DOPs
programming and secondly we introduce all the
auxiliary elements needed for our definition of
subtask. We hope that the comments placed in the
listing will help to read the source code.
First of all here is the class describing the whole
DOP.
class MyTask : public MAG {
// the ancestor contains
// the initial matrix
// and all yet generated grids
private:
AST sbtAll;
// all possible generated subtasks
MySubTask* pstAnyTime;
// the best of yet solved tasks;
// it is NOT included in sbtAll
// ...
};
Additional comments. We use the following
auxiliary classes:
• ancestor class MAG (abbreviation for Matrix,
Array, Grid) includes data of the initial matrix
and of the grids which are generated to the
moment;
• class
AST (“array of subtasks”) is an array of
subtasks; when using MFC library this class
should be derivate of the class
CPtrArray
which includes only pointers to defined below
subtask objects (of the class
MySubTask).
Then here is the class describing a subtask; we
are listing the variant using MFC.
class MySubTask {
private:
MyMatrix* pMatrixThis;
// already filled HERE matrix
double rQuality;
MyWordArray* pArrYes;
MyWordArray* pArrNo;
// both arrays contain
// numbers of grids
// ...
};
Additional comments. The matrix
*pMatrixThis is of the same type as the matrix
included in the class MAG; obviously at the start of
TB&B this matrix is filled with 0 only, and when
receiving any current solution it coincide with the
matrix included in the class MAG. The value
rQuality is a boundary which is used in TB&B
execution. The array
*pArrYes contains the
SOME SPECIFIC HEURISTICS FOR SITUATION CLUSTERING PROBLEMS
275

numbers of the grids which form the matrix
*pMatrixThis. According to the common
principles of TB&B a subtask must include the list
of the grids which cannot be included in
forthcoming solution and
*pArrNo contains this list.
References to the grids are made by their numbers
included in the class MAG. Thus there is no direct
access to the grids from the class
MySubTask but
the logic of this approach to the problem i.e. the
logic of TB&B application does not demand such
access.
Basing on the introduced above metric on grid we
define a metric on subtasks. To do this let us first
define a metric for any two arrays of grids. Let
X={x
1
,…,x
m
} be the first array, Y={y
1
,…,y
n
} be the
second one. Then the metric itself is
ρ(X,Y) = (∑
i , j
Ω(x
i
, y
j
)) / (m·n),
where i and j take on all possible values. Then let X
1
and Y
1
be arrays *pArrYes and *pArrNo for the first
subtask, X
2
and Y
2
be the corresponding arrays for
the second one. Let us denote
A = ρ(X
1
,X
2
), BB
1
= ρ(X
1
,Y
2
), B
2
B = ρ(X
2
,Y
1
),
and as the distance between the subtasks we will use
the value
(1+2·α)·A – α·(B
B
1
+B
2
),
where α is again some coefficient to be adjusted
with help of genetic algorithms. (Actually the last
formula is true only for “close” subtasks. In the
other case, for example in case of high values of the
sum B
1
+B
2
, we use other formulae, however as
before we will not get deeply into details.)
When we use this metric in solving subtasks “by
analogy” as it was said above we make efficient
versions of programs because according to the
metric’s description we have similar sets of grids in
the arrays *pArrYes and *pArrNo for close in the
metric subtasks. However this metric demands
precomputing of distances between any two of the
grids generated to the moment. That is why the
authors often use another metric which is somehow
analogous to the metric given above for the grids.
So let us describe another variant of metric on a
subtasks set. Let P
1
be the set of cells of the first
subtask’s matrix with value of 1; P
2
be the same for
the second subtask. Then as a metric we use the
value Ω(P
1
,P
2
). Note that the formulas here are mush
simpler than in the previous variant but if computing
of the distances on the set of grids is made
beforehand then the calculations for the second
variant of metric take quite longer. These
calculations bay be demanded as auxiliary for
different subtasks of TB&B and in some variants of
TB&B are actually made beforehand. Besides see
the brief description of possible algorithms
managing such calculations in Section 5.
4 METRICS FOR SITUATIONS IN
GAME PROGRAMS
This section describes one problem of
nondeterministic game-playing programming and
metrics used for clustering of situations in this game.
However we (as in the previous section) leave the
general title because the offered approach can be
used in other problems of non-deterministic game-
playing programming.
The particular nondeterministic game in which
we use situations clustering is called “Omega”
game; a similar game was described in one of Martin
Gardner’s works. Let us briefly describe the rules of
this game.
In the game a square matrix (with N rows and N
columns) is used. Two players take turns to fill the
matrix with natural numbers. After filling the whole
matrix (both players make N
2
moves in aggregate)
the first player calculates the sum of the numbers
productions by rows, the second player calculates
the sum of the productions by columns. The
difference between the sums is the first player’s
profit and the second player’s loss. The numbers
which the players use to fill the matrix are chosen at
random from the range between 1 and N
2
before
each move.
For this game even at the dimension of 3 (3 rows
and 3 columns) there is no chance to find the
optimal move with help of exhaustive search. That is
why here we have to use TB&B modified in a
specific way according to nondeterministic nature of
the game (for details see (Melnikov, Radionov,
Moseev, and Melnikova, 2006)). In particular we
use the method of risk functions developed by the
authors for programming of nondeterministic games.
Besides, some specific heuristics are used in order to
shorten the search.
In most cases at a regular step of TB&B we need
to classify the situation to choose one of the
heuristics or to define the particular values of the
used heuristics’ parameters for instance the values of
the risk functions’ parameters. Moreover, an
efficient method of situations classifying often helps
to determine such an order of the moves processing
which can shorten the search.
Before we can define a metric on the set of
situations of this game we need to define the term
situation itself (or subtask in term of the previous
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
276

section). A situation in this case is a game matrix
partly filled with numbers i.e. a state of the game
matrix after a move of one of the players. Thus we
are going to define a metric on the set of partly filled
matrixes.
To find the distance between two partly filled
matrixes let us fill their empty cells with average of
distribution of the random value. In our case we
should put the value (N
2
+1)/2 into all empty cells of
both matrixes. Now for each matrix we find the
products of numbers by columns and by rows. Then
we permute the rows and columns of each matrix in
ascending order of the corresponding products. Note
that the result of this game does not change after
permutation of rows or columns of its matrix. Let S
be the sum of absolute values of the differences
between the corresponding products of the matrixes
(2*N differences in aggregate). The value of S can
be considered the distance between the matrixes. We
can also use a normalized variant i.e.
S/(2*N*(N
2*N
-1)).
As is easy to see both variants are equal to 0
when the matrixes are the same. They also equal to 0
when the matrixes are equal to permutation and this
property corresponds to the game specific. Besides,
the normalized variant can never exceed 1 and it can
reach this value only in the case when one matrix is
completely filled with 1s and the other one is
completely filled with N
2
.
The given metric can be used in the described above
approach of situations clustering.
5 SOME COMMON
ALGORITHMS
In one of the previous sections the following
question was asked: why in our case we need to
solve problems “by analogy” though the goal of
each anytime-algorithm is in achieving one pseudo-
optimal solution. We can give the following
answers. First, we do not know which one of the
considered subtasks will deliver the pseudo-optimal
solution (which will replace the current one i.e.
*pstAnyTime according to the given program
notation). Second, according to one of the main
principles of the branch-and-bound method (not only
in the truncated one) two different subtasks can not
deliver the same final solution. Therefore the current
pseudo-optimal solutions for different subtasks will
certainly be different. However as is easy to see the
given answers do not cancel the possibility (and
maybe necessity) of solving similar (i.e. close in
metric) tasks by analogy.
Thus solving problems by analogy is one of the
common approaches which the authors use for
different DOPs. Among the other common
approaches we should firstly mark the following
one.
As we said in Section 3 sometimes it is good to
have a metric on a set of grids (or generally on a set
of auxiliary objects common for several subtasks).
However it often (including the described problem)
takes too much time to build such metric on set of all
situations. In this connection there can be used the
following algorithm. In our implementations of
TB&B we use such auxiliary algorithms one by one:
finding the new metric value for a pair of auxiliary
objects of the subset (grids and so);
• adjusting the precomputed metric value for a
pair of subtasks;
• selection of the next subtask from the list if
subtasks demanding solution;
• selection of an auxiliary object (grid or so) from
the corresponding set; this object will be used as
the separation element for the next step of
TB&B;
• building the left and the right subtasks basing on
the selected separation element and including
these subtasks in the corresponding data
structure for subsequent solution.
Thus we can say that here we have briefly
described TB&B with application of algorithms
connected with situation clustering. Remark also,
that:
• The authors have just started to use this auxiliary
algorithms in practical programming and its
efficiency is still under question. Besides we
should mark that the other possible solution of
the problem is implementation of distributed
calculations. However it is absolutely separate
problem and the authors did not yet start to solve
it in practice.
• In Section 3 we did not consider such algorithms
of precomputing. For the problem of
minimization of nondeterministic finite automata
the formulae for the metric precomputing are
similar to the ones given in Section 3. However
they use only those pairs of grids which have
their metrics already computed.
• Actually the most efficient data structure for
keeping the subtasks sets is a specific variant of
correctly filled tree (or heap in other terms; see
(
Cormen, Leiserson, Rivest, and Stein, 2001) and
others).
• At the same time we build the so called sequence
of the right problems (SRP). In (Melnikov,
SOME SPECIFIC HEURISTICS FOR SITUATION CLUSTERING PROBLEMS
277
2005), there is information about this auxiliary
algorithm but it is quite important so we are
giving a part of its description from that paper.
Each time, when we obtain the next right
problem (let us call it problem T) we make at the
same time also the SRP, i.e., T, then the right
problem of T, then the right problem of the right
problem of T, etc. Certainly, we make each time
also the corresponding left problems, i.e., the left
problem of T, then the left problem of the right
problem of T, etc. This process finishes:
– when we obtain a trivial problem (e.g., of
dimension 1), then we use its solution (i.e.,
its bound, and also the obtained path, and
similar behavior) by the current quasi-
optimal solution of the considered anytime
algorithm;
– or when we obtain the big value of the
bound, for example, if this value is more
than the current (existing) quasi-optimal
solution.
In practice, such process of SRP-constructing does not
require a lot of time, and the increasing the dimension of
the list of problems for the solution in the future is very
reasonable.
6 CONCLUSION. SOME
PRACTICAL RESULTS
So in this paper we considered some issues of the
offered by the authors multi-heuristic approach to
discrete optimization problems, the issues connected
with problems of situations clustering. In conclusion
we will mark the following circumstances.
In auxiliary algorithms we often use self learning
with help of genetic algorithms and not only in cases
evidently marked in Section 3. Generally you can
find more information about the author’s usage of
genetic algorithms in the mentioned above
references (Melnikov and Radionov, 1998;
Melnikov, 2005; Belozyorova and Melnikov, 2005;
Melnikova and Radionov, 2005; Melnikov,
Radionov, Moseev, and Melnikova, 2006; Melnikov,
Radionov, and Gumayunov, 2006), mainly in
(Melnikov, 2001; 2006).
We also should mark once more, that the given
list of literature consists almost only of the works of
the authors of the present paper. However this is a
consequence of the fact that we offer our own
approach to solving DOPs generally.
As it was mentioned above, the results of our
programs execution are about the same as the ones
of the programs found in the Internet. The best of
available links can be found at
http://citeseer.ifi.unizh.ch/fiser02set
.html or at
http://www.dei.isep.ipp.pt/~acc/bfunc/.
Now we are going to show one slightly different
approach to describing the practical results, see
below.
While testing, we set the time for our anytime
algorithm (see the tables). We also set the dimension
of the problem – i.e., the number of rows for NFA
(the number of columns depends of the last value
also by special variate) and the number of variables
for DNF – not the numbers of grids for NFA and
planes for DNF, the last values are also special
variates depending on previous ones.
The clock speed of the computer was about 2.0
GHz. If we choose the time under 10 minutes, we
make the averaging-out about 50 solutions.
And the values of cells have the following
meaning. For each cell, we made corresponding
tests. For each test, we set the number of
grids/planes for the given problem (certainly, we did
not use this information in the program) and obtain
the value of grids/planes found by anytime
algorithm. Then we counted comparative
improvement of this value (+) or the worsening (–).
The possibility of positive values is the corollary of
the fact, that, e.g. for the DNF, two planes of
dimension k could form one plane of dimension k+1.
The values were averaged; they are written in the
table in percents. (I.e., +0.22 means that the mean
value is better than the a priori given than 0.22%.)
Thus, below are the practical results.
Table 1: Nondeterministic Finite Automata.
NFA 20–23 40–45 60–65
01 sec 1.76 –0.58 –0.02
10 sec –0.55 –0.17 +0.22
01 min –0.03 +0.45 +1.00
10 min 0 +1.06 +1.07
01 h 0 +1.07 +1.17
Table 2: Disjunctive Normal Forms.
DNF 20–22 25–27 30–31
01 sec –8.5 –2.2 –1.9
10 sec –1.21 –0.70 –0.43
01 min –0.73 –0.65 –0.43
10 min –0.03 –0.01 –0.01
01 h –0.03 –0.01 0
The obtained results are near to 100%; this fact
shows that the approach proposed in this paper could
be applied in the future. And in the next papers, we
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
278

are going to give the practical results for two other
problems mentioned in Section 2.
The authors hope to continue the series of papers
about applying the multi-heuristic approach to
solution of different DOPs. In this connection we
should note that some subjects of the new
algorithms, programs and publications were briefly
mentioned in the present paper.
REFERENCES
Belozyorova, A., and Melnikov, B., 2005. Using
Heuristics Complex for the Problem of Making
Diagram of Nuclide Transformations, In 2nd Scientific
Conference “Tools and Techinques of Information
Processing”, Moscow State Lomonosov Univ. Ed.
(2005) 208–210 (in Russian).
Carbonell, J., 1983. Derivational Analogy and Its Role in
Problem Solving, AAAI (1983) 64–69.
Cormen, T., Leiserson, C., Rivest, R., and Stein, C., 2001.
Introduction to Algorithms. – MIT Press and McGraw-
Hill, 2001.
Lifschitz, V., 1990. Frames in the Space of Situations,
Artificial Intelligence 46 (1990) 365–376.
Melnikov, B., and Radionov, A., 1998. On the Decision
of Strategy in Nondeterministic Antagonistic Games”,
In Programming and Computer Software
(Programmirovanie, Russian Acad. Sci. Ed., English
translation), Vo.24, No.5 (1998).
Melnikov, B., 2000. Once More About the State-
Minimization of the Nondeterministic Finite
Automata, The Korean Journal of Computational and
Applied Mathematics, Vo.7, No.3. (2000) 655–662.
Melnikov, B., 2001. Heuristics in Programming
Nondeterministic Games, In Programming and
Computer Software (Programmirovanie, Russian
Acad. Sci. Ed., English translation), Vo.27, No.5
(2001) 277–288.
Melnikov, B., and Sciarini-Guryanova, N., 2002. Possible
Edges of a Finite Automaton Defining a Given
Regular Language, The Korean Journal of
Computational and Applied Mathematics, Vo.9, No.2
(2002) 475–485.
Melnikov, B., 2005. Discrete Optimization Problems –
Some New Heuristic Approaches, In 8th International
Conference on High Performance Computing and
Grid in Asia Pacific Region, IEEE Computer Society
Press Ed. (2005) 73–80.
Melnikova, E., and Radionov, A., 2005. A Construction
of Taxonomic Hierarchy of Documents Using Risk
Functions, In 2nd Scientific Conference “Tools and
Techinques of Information Processing”, Moscow
State Lomonosov Univ. Ed. (2005) 103–106 (in
Russian).
Melnikov, B., 2006. A Multi-Heuristic Approach to the
Problems of Discrete Optimization, In Cybernetics
and Systems Analysis (Ukranian Acad. Sci. Ed.), 2006,
No. 5, accepted (in Russian).
Melnikov, B., Radionov, A., and Gumayunov, V., 2006.
Some Special Heuristics for Discrete Optimization
Problems, In 8th International Conference on
Enterprise Information Systems, Cyprus (2006) 91–95.
Melnikov, B., Radionov, A., Moseev, A., and Melnikova,
E., 2006. Heuristics for Working With Searching Tree
in Non-Deterministic Games, ICGA Journal, 2006,
submitted.
Polák, L., 2004. Minimization of NFA Using the
Universal Automaton, CIAA (2004) 325–326.
SOME SPECIFIC HEURISTICS FOR SITUATION CLUSTERING PROBLEMS
279
