
ALGORITHMIC SKELETONS FOR BRANCH & BOUND
Michael Poldner
University of M
¨
unster, Department of Information Systems
Leonardo Campus 3, D-48149 M
¨
unster, Germany
Herbert Kuchen
University of M
¨
unster, Department of Information Systems
Leonardo Campus 3, D-48149 M
¨
unster, Germany
Keywords:
Parallel Computing, Algorithmic Skeletons, Branch & Bound, Load Distribution, Termination Detection.
Abstract:
Algorithmic skeletons are predefined components for parallel programming. We will present a skeleton for
branch & bound problems for MIMD machines with distributed memory. This skeleton is based on a dis-
tributed work pool. We discuss two variants, one with supply-driven work distribution and one with demand-
driven work distribution. This approach is compared to a simple branch & bound skeleton with a centralized
work pool, which has been used in a previous version of our skeleton library Muesli. Based on experimental
results for two example applications, namely the n-puzzle and the traveling salesman problem, we show that
the distributed work pool is clearly better and enables good runtimes and in particular scalability. Moreover,
we discuss some implementation aspects such as termination detection as well as overlapping computation
and communication.
1 INTRODUCTION
Today, parallel programming of MIMD machines
with distributed memory is mostly based on message-
passing libraries such as MPI (W. Gropp, 1999; MPI,
2006). The resulting low programming level is error-
prone and time consuming. Thus, many approaches
have been suggested, which provide a higher level
of abstraction and an easier program development.
One such approach is based on so-called algorith-
mic skeletons (Cole, 1989; Cole, 2006), i.e. typical
patterns for parallel programming which are often of-
fered to the user as higher-order functions. By provid-
ing application-specific parameters to these functions,
the user can adapt an application independent skele-
ton to the considered parallel application. (S)he does
not have to worry about low-level implementation de-
tails such as sending and receiving messages. Since
the skeletons are efficiently implemented, the result-
ing parallel application can be almost as efficient as
one based on low-level message passing.
Algorithmic skeletons can be roughly divided
into data parallel and task parallel ones. Data-
parallel skeletons (see e.g. (R. Bisseling, 2005;
G. H. Botorog, 1996; G. H. Botorog, 1998;
H. Kuchen, 1994; Kuchen, 2002; Kuchen, 2004))
process a distributed data structure such as a dis-
tributed array or matrix as a whole, e.g. by applying
a function to every element or by rotating or permut-
ing its elements. Task-parallel skeletons (A. Benoit,
2005; Cole, 2004; Hofstedt, 1998; H. Kuchen,
2002; Kuchen, 2002; Kuchen, 2004; Pelagatti, 2003)
construct a system of processes communicating via
streams of data. Such a system is mostly generated
by nesting typical building blocks such as farms and
pipelines. In the present paper, we will focus on a
particular task-parallel skeleton, namely a branch &
bound skeleton.
Branch & bound (G.L. Nemhauser, 1999) is a
well-known and frequently applied approach to solve
certain optimization problems, among them inte-
ger and mixed-integer linear optimization problems
(G.L. Nemhauser, 1999) and the well-known travel-
ing salesman problem (J.D.C. Little, 1963). Many
practically important but NP-hard planning problems
can be formulated as (mixed) integer optimization
problems, e.g. production planning, crew scheduling,
and vehicle routing. Branch & bound is often the only
practically successful approach to solve these prob-
lems exactly. In the sequel we will assume without
loss of generality that an optimization problem con-
sists of finding a solution value which minimizes an
objective function while observing a system of con-
straints. The main idea of branch & bound is the fol-
291
Poldner M. and Kuchen H. (2006).
ALGORITHMIC SKELETONS FOR BRANCH & BOUND.
In Proceedings of the First International Conference on Software and Data Technologies, pages 291-300
DOI: 10.5220/0001315002910300
Copyright
c
SciTePress

lowing. A problem is recursively divided into sub-
problems and lower bounds for the optimal solution
of each subproblem are computed. If a solution of
a (sub)problem is found, it is also a solution of the
overall problem. Then, all other subproblems can
be discarded, whose corresponding lower bounds are
greater than the value of the solution. Subproblems
with smaller lower bounds still have to considered re-
cursively.
Only little related work on algorithmic skeletons
for branch & bound can be found in the literature
(E. Alba, 2002; F. Almeida, 2001; I. Dorta, 2003;
Hofstedt, 1998). However, in the corresponding liter-
ature there is no discussion of different designs. The
MaLLBa implementation is based on a master/worker
scheme and it uses a central queue (rather than a heap)
for storing problems. The master distributes problems
to workers and receives their solutions and generated
subproblems. On a shared memory machine this ap-
proach can work well. We will show in the sequel
that a master/worker approach is less suited to handle
branch & bound problems on distributed memory ma-
chines. In a previous version of the Muesli skeleton
library, a branch & bound skeleton with a centralized
work pool has bee used, too (H. Kuchen, 2002). Hof-
stedt outlines a B&B skeleton with a distributed work
pool. Here, work is only shared, if a local work pool
is empty. Thus, worthwhile problems are not propa-
gated quickly and their investigation is concentrated
on a few workers only.
The rest of this paper is structured as follows. In
Section 2, we recall, how branch & bound algorithms
can be used to solve optimization problems. In Sec-
tion 3, we introduce different designs of branch &
bound skeletons in the framework of the skeleton li-
brary Muesli (Kuchen, 2002; Kuchen, 2004; Kuchen,
2006). After describing the simple centralized design
considered in (H. Kuchen, 2002), we will focus on
a design with a distributed work pool. Section 4 con-
tains experimental results demonstrating the strengths
and weaknesses of the different designs. In Section 5,
we conclude and point out future work.
2 BRANCH & BOUND
Branch & bound algorithms are general methods used
for solving difficult combinatorial optimization prob-
lems. In this section, we illustrate the main prin-
ciples of branch & bound algorithms using the 8-
puzzle, a simplified version of the well-known 15-
puzzle (Quinn, 1994), as example. A branch & bound
algorithm searches the complete solution space of a
given problem for the best solution. Due to the ex-
ponentially increasing number of feasible solutions,
their explicit enumeration is often impossible in prac-
tice. However, the knowledge about the currently best
solution, which is called incumbent, and the use of
bounds for the function to be optimized enables the
algorithm to search parts of the solution space only
implicitly. During the solution process, a pool of yet
unexplored subsets of the solution space, called the
work pool, describes the current status of the search.
Initially there is only one subset, namely the com-
plete solution space, and the best solution found so
far is infinity. The unexplored subsets are repre-
sented as nodes in a dynamically generated search
tree, which initially only contains the root, and each
iteration of the branch & bound algorithm processes
one such node. This tree is called the state-space tree.
Each node in the state-space tree has associated data,
called its description, which can be used to determine,
whether it represents a solution and whether it has any
successors. A branch & bound problem is solved by
applying a small set of basic rules. While the signa-
ture of these rules is always the same, the concrete
formulation of the rules is problem dependent. Start-
ing from a given initial problem, subproblems with
pairwise disjoint state spaces are generated using an
appropriate branching rule. A generated subproblem
can be estimated applying a bounding rule. Using a
selection rule, the subproblem to be branched from
next is chosen from the work pool. Last but not least
subproblems with non-optimal or inadmissible solu-
tions can be eliminated during the computation using
an elimination rule. The sequence of the application
of these rules may vary according to the strategy cho-
sen for selecting the next node to process (J. Clausen,
1999). As an example of the branch and bound tech-
nique, consider the 8-puzzle (Quinn, 1994). Figure 1
illustrates the goal state of the 8-puzzle and the first
three levels of the state-space tree.
The 8-puzzle consists of eight tiles, numbered 1
through 8, arranged on a 3 × 3 board. Eight positions
on the board contain exactly one tile and the remain-
ing position is empty. The objective of the puzzle is
to repeatedly fill the hole with a tile adjacent to it in
horizontal or vertical direction, until the tiles are in
row major order. The aim is to solve the puzzle in the
least number of moves.
The branching rule describes, how to split a prob-
lem represented by a given initial board into subprob-
lems represented by the boards resulting after all valid
moves. A minimum number of tile moves needed to
solve the puzzle can be estimated by adding the num-
ber of tile moves made so far to the Manhattan dis-
tance between the current position of each tile and its
goal position. The computation of this lower bound is
described by the bounding rule.
The state-space tree represents all possible boards
that can be reached from the initial board. One way
to solve this puzzle is to pursue a breadth first search
or a depth first search of the state-space tree until the
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
292
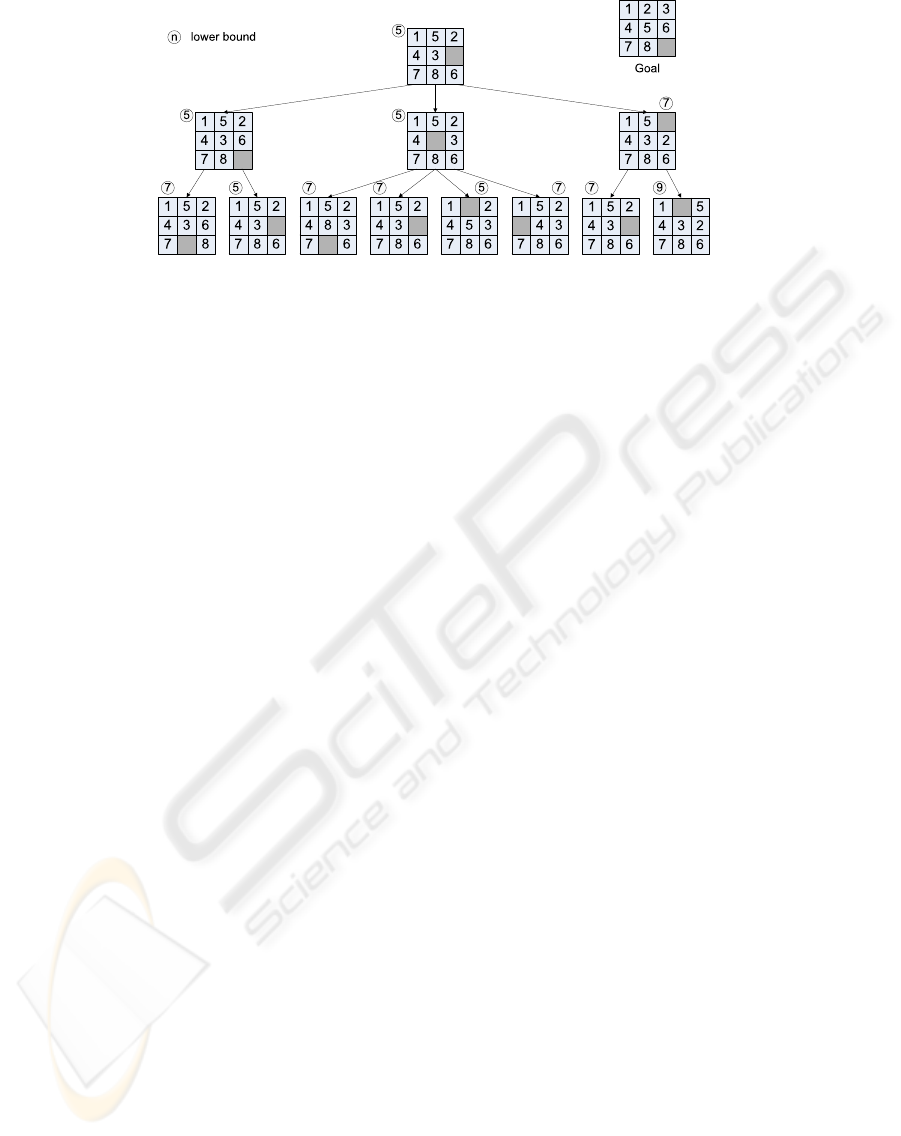
Hole
Figure 1: Upper part of the state-space tree corresponding to an instance of the 8-puzzle and its goal board.
sorted board is discovered. However, we can often
reach the goal faster by selecting the node with the
best lower bound to branch from. This selection rule
corresponds to a best-first search strategy. Other se-
lection rules such as a variant of depth-first search
are discussed in (J. Clausen, 1999; Y. Shinano, 1995;
Y. Shinano, 1997).
Branch & bound algorithms can be parallelized at
a low or at a high level. In case of a low-level paral-
lelization, the sequential algorithm is taken as a start-
ing point and just the computation of the lower bound,
the selection of the subproblem to branch from next,
and/or the application of the elimination rule are per-
formed by several processes in a data parallel way.
The overall behavior of such a parallel algorithm re-
sembles of the sequential algorithm.
In case of a high-level parallelization, the effects
and consequences of the parallelism are not restricted
to a particular part of the algorithm, but influence the
algorithm as a whole. Several iterations of the main
loop are performed in a task-parallel way, such that
the state-space tree is explored in a different (non-
deterministic!) order than in the sequential algorithm.
3 BRANCH & BOUND
SKELETONS
In this section, we will consider different implemen-
tation and design issues of branch & bound skeletons.
For the most interesting distributed design, several
work distribution strategies are discussed and com-
pared with respect to scalability, overhead, and per-
formance. Moreover, a corresponding termination de-
tection algorithm is presented.
A B&B skeleton is based on one or more branch
& bound algorithms and offers them to the user as
predefined parallel components. Parallel branch &
bound algorithms can be classified depending on the
organization of the work pool. A central, distributed,
and hybrid organization can be distinguished. In
the MaLLBa project, a central work pool is used
(F. Almeida, 2001; I. Dorta, 2003). Hofstedt (Hofst-
edt, 1998) sketches a distributed scheme, where work
is only delegated, if a local work pool is empty. Shi-
nano et al. (Y. Shinano, 1995; Y. Shinano, 1997)
and Xu et al. (Y. Xu, 2005) describe hybrid ap-
proaches. A more detailed classification can be found
in (Trienekens, 1990), where also complete and par-
tial knowledge bases, different strategies for the use
of knowledge and the division of work as well as the
chosen synchronicity of processes are distinguished.
Moreover, different selection rules can be fixed.
Here, we use the classical best-first strategy. Let
us mention that this can be used to simulate other
strategies such as the depth-first approach suggested
by Clausen and Perregaard (J. Clausen, 1999). The
bounding function just has to depend on the depth in
the state-space tree.
We will consider the skeletons in the context of
the skeleton library Muesli (Kuchen, 2002; Kuchen,
2004; Kuchen, 2006). Muesli is based on MPI
(W. Gropp, 1999; MPI, 2006) internally in order to
inherit its platform independence.
3.1 Design with a Centralized Work
Pool Manager
The simplest approach is a kind of the master/worker
design as depicted in Figure 2. The work pool is
maintained by the master, which distributes problems
to the workers and receives solutions and subprob-
lems from them. The approach taken in a previous
version of the skeleton library Muesli is based on this
centralized design. When a worker receives a prob-
lem, it either solves it or decomposes it into subprob-
lems and computes a lower bound for each of the sub-
problems. The work pool is organized as a heap, and
the subproblem with the best lower bound at the time
is stored in its root. Idle workers are served with
new problems taken from the root. This selection
ALGORITHMIC SKELETONS FOR BRANCH & BOUND
293

Workpool
initial
problem
Predecessor Successor
solution
optimal
Worker Worker
...
problems
subproblems,
solutions
subproblems,
solutions
Manager
Initial
Filter Filter
Final
B&B
Figure 2: Branch & bound skeleton with centralized work pool manager.
rule implicitly implements a best-first search strategy.
Subproblems are discarded, if their bounds indicate
that they cannot produce better solutions than the best
known solution. An optimal solution is found, if the
master has received a solution, which is better than
all the bounds of all the problems in its work pool
and no worker currently processes a subproblem. If
at least one worker is processing, it can lead to a new
incumbent. When the execution is finished, the op-
timal solution is sent to the master’s successor in the
overall process topology
1
and the skeleton is ready to
accept and solve the next optimization problem. The
code fragment in Fig. 3 illustrates the application of
our skeleton in the context of the Muesli library. It
constructs the process topology shown in Fig. 2.
int main(int argc, char
*
argv[]) {
InitSkeletons(argc,argv);
// step 1: create a process topology
Initial<Problem> initial(generateProblem);
Filter<Problem,Problem> filter(generateCases,1);
BranchAndBound<Problem> bnb(filter,n,
betterThan,isSolution);
Final<Problem> final(fin);
Pipe pipe(initial,bnb,final);
// step 2: start process topology
pipe.start();
TerminateSkeletons();
}
Figure 3: Example application using a branch and bound
skeleton with centralized work pool manager.
In a first step the process topology is cre-
ated using C++ constructors. The process topol-
ogy consists of an initial process, a branch &
bound process, and a final process connected by
a pipeline skeleton. The initial process is pa-
rameterized with a generateProblem method
returning the initial optimization problem that is
to be solved. The filter process represents a
worker. The passed function generateCases de-
scribes, how to branch & bound subproblems. The
1
Remember that task-parallel skeletons can be nested.
constructor BranchAndBound produces n copies
of the worker and connects them to the inter-
nal work pool manager (which is not visible to
the user). bool betterThan(Problem x1,
Problem x2) has to deliver true, iff the lower
(upper) bound for the best solution of problem x1 is
better than the lower (upper) bound for the best solu-
tion of problem x2 in case of a minimization (max-
imization) problem. This function is used internally
for the work pool organization. The function bool
isSolution(Problem x) can be used to dis-
cover, whether its argument x is a solution or not. The
final process receives and processes the optimal solu-
tion. Problems and solutions are encoded by the same
type Problem.
The advantage of a single central work pool main-
tained by the master is that it provides a good overall
picture of the work still to be done. This makes it
easy to provide each worker with a good subproblem
to branch from and to prune the work pool. Moreover,
the termination of the workers is easy to implement,
because the master knows about all idle workers at
any time, and the best solution can be detected eas-
ily. The disadvantage is that accessing the work pool
tends to be a bottleneck, as the work pool can only
be accessed by one worker at a time. This may re-
sult in high idle times on the workers’ site. Another
disadvantage is that the master/worker approach in-
curs high communication costs, since each subprob-
lem is sent from its producer to the master and prop-
agated to its processing worker. If the master decides
to eliminate a received subproblem, time is wasted
for its transmission. Moreover, the communication
time required to send a problem to a worker and to re-
ceive in return some subproblems may be greater than
the time needed to do the computation locally. The
master’s limited memory capacity for maintaining the
work pool is another disadvantage of this architecture.
As we will see in the next subsection, these disad-
vantages can be avoided by a distributed maintenance
of the work pool. However, this design requires a suit-
able scheme for distributing subproblems and some
distributed termination detection.
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
294

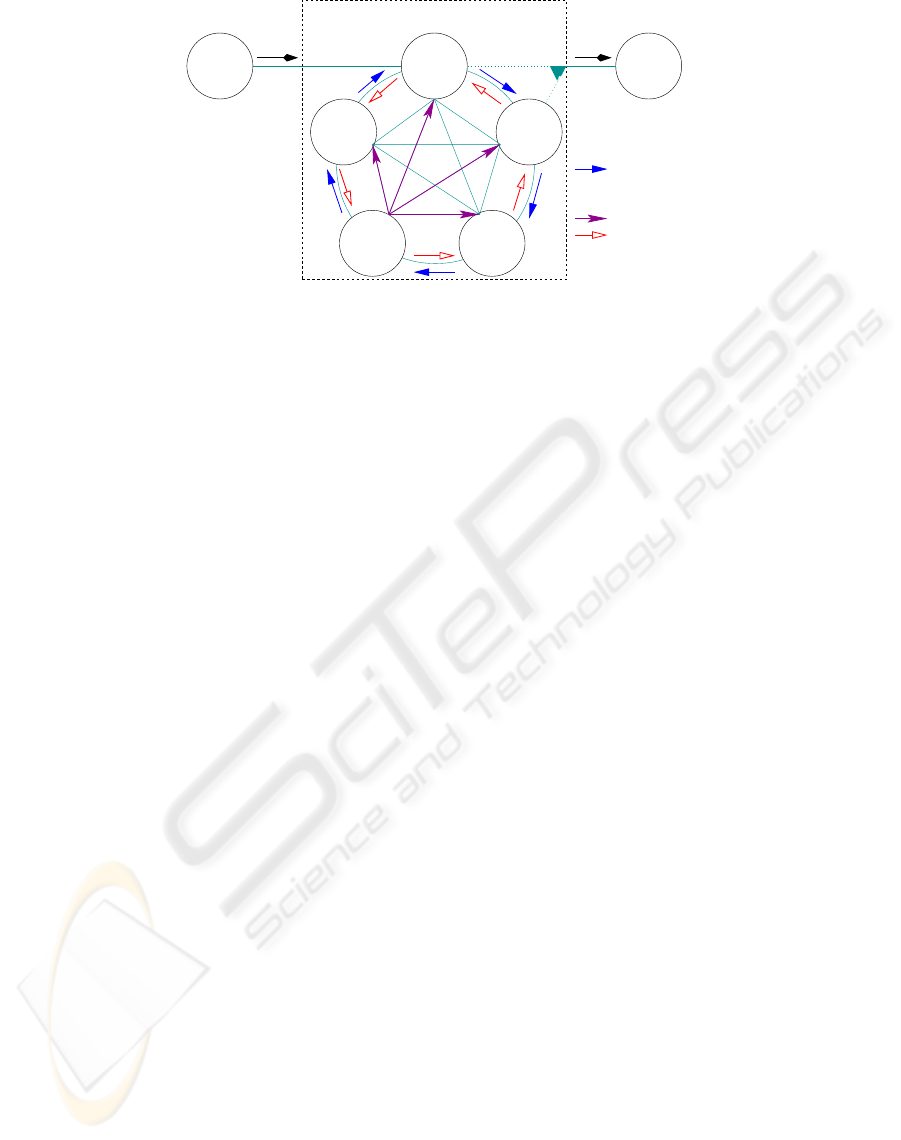
3.2 Distributed Work Pool
Figure 5 illustrates the design of the distributed
branch and bound (DBB) skeleton provided by the
Muesli skeleton library. It consists of a set of peer
solvers, which exchange problems, solutions, and
(possibly) load information. Several topologies for
connecting the solvers are possible. For small num-
bers of processors, a ring topology can be used, since
it enables an easy termination detection. For larger
numbers of processors, topologies like torus or hyper-
cube may lead to a faster propagation of work from
hot spots to idle processors. For simplicity, we will
assume a ring topology in the sequel. Compared to
more complicated topologies the ring also simplifies
the dynamic adaption of the number of workers in
case that more or less computation capacity has to be
devoted to the branch & bound skeleton within the
overall computation. This (not yet implemented) fea-
ture will enable a well-balanced overall computation.
In our example, n = 5 solvers are used. Each
solver maintains its own local work pool and has one
entrance and one exit. Exactly one of the solvers,
called the master solver, serves as an entrance to the
DBB-skeleton and receives new optimization prob-
lems from the predecessor. Any of the n solvers may
deliver the detected optimal solution to the successor
of the branch & bound skeleton in the overall process
topology. All solvers know each other for a fast distri-
bution of newly detected best solutions
2
. If the skele-
ton only consists of a single solver neither communi-
cation nor distributed termination detection are nec-
essary. In this case all communication parts as well
as the distributed termination detection algorithm are
bypassed to speed up the computation.
The code fragment in Fig. 4 shows an example
application of our distributed B&B skeleton. It con-
structs the process topology depicted in Fig. 5. Work
request messages are only sent when using a demand-
driven work distribution.
The construction of the process topology resem-
bles that in the previous example. Instead of a filter a
BBSolver process is used as a worker. In addition to
the betterThan and isSolution function two
other argument functions are passed to the construc-
tor, namely a branch and a bound function. The
constructor DistributedBB produces n copies of
the solver. One of the solvers is automatically chosen
as the master solver.
As described in the previous section, a task-parallel
skeleton consumes a stream of input values and pro-
duces a stream of output values. If the master solver
receives a new optimization problem, the communica-
tion with the predecessor is blocked until the received
2
Thus, the topology is in fact a kind of wheel with
spokes rather than a ring.
int main(int argc, char
*
argv) {
InitSkeletons(argc,argv);
// step 1: create a process topology
Initial<Problem> initial(generateProblem);
BBSolver<Problem> solver("ring",branch,bound,
betterThan,isSolution);
DistributedBB<Problem> bnb =
DistributedBB<Problem>(solver,n);
Final<Problem> final(fin);
Pipe pipe(initial,bnb,final);
// step 2: start process topology
pipe.start();
TerminateSkeletons();
}
Figure 4: Task parallel example application of a fully dis-
tributed Branch and Bound skeleton.
problem is solved. This ensures that the skeleton pro-
cesses only one optimization problem at a time. There
are different variants for the initialization of paral-
lel branch & bound algorithms with the objective of
providing each worker with a certain amount of work
within the start-up phase. Ideally, the work load is
distributed equally to all workers. However, the work
load is hard to predict without any domain knowledge.
For this reason the skeleton uses the most common
approach, namely root initialization, i.e. the root of
the state space tree is inserted into the local work pool
of the master solver. Subproblems are distributed ac-
cording to the load balancing scheme applied by the
solvers. This initialization has the advantage that it is
very easy to implement and no additional code is nec-
essary. Other initialization strategies are discussed in
the literature. A good survey can be found in (Hen-
rich, 1994a).
Each worker repeatedly executes two phases: a
communication phase and a solution phase. Let us
first consider the communication phase. In order to
avoid that computation time is wasted with the solu-
tion of irrelevant subproblems, it is essential to spread
and process new best solutions as quickly as possible.
For this reason, we distinguish problem messages and
incumbent messages. Each solver first checks for ar-
riving incumbents with MPI Testsome. If it has re-
ceived new incumbents, the solver stores the best and
discards the others. Moreover, it removes subprob-
lems whose lower bound is worse than the incumbent
from the work pool. Then, it checks for arriving sub-
problems and stores them in the work pool, if their
lower bounds are better than the incumbent.
The solution phase starts with selecting an unex-
amined subproblem from the work pool. As in the
master/worker design, the work pool is organized as
a heap and the selection rule implements a best-first
search strategy. The selected problem is decomposed
into m subproblems by applying branch. For each
ALGORITHMIC SKELETONS FOR BRANCH & BOUND
295
...
problems +
termination
detection
BBSolver
BBSolver BBSolver
BBSolver
Initial BBSolver Final
Predecessor
Master Solver
B&B with distributed work pool
Worker
Successor
work requests
incumbents
initial
problem
optimal
solution
Figure 5: Branch & bound skeleton with distributed work pool.
of the subproblems, we proceed as follows. First, we
check, whether it is solved. If a new best solution is
detected, we update the local incumbent and broad-
cast it. A worse solution is discarded. Finally, if the
subproblem is not yet solved, the bound function is
applied and the subproblem is stored in the work pool
(see Fig. 5).
3.3 Load Distribution and
Knowledge Sharing
Since the work pools of the different solvers, grow
and shrink differently, some load balancing mecha-
nism is required. Many global and local load dis-
tribution schemes have been studied in the literature
(Henrich, 1994b; Henrich, 1995; R. L
¨
uling, 1992;
N. Mahapatra, 1998; Sanders, 1998; A. Shina, 1992)
and many of them are suited in the context of a dis-
tributed branch & bound skeleton. Here, we will fo-
cus on two local load balancing schemes, a supply-
and a demand-driven one. The local schemes avoid
the larger overhead of a global scheme. On the other
hand, they need more time to distribute work over
long distances.
With the simple supply-driven scheme, each
worker sends in each ith iteration its second best prob-
lem to its right neighbor in the ring topology. It al-
ways processes the best problem itself, in order to
avoid communication overhead compared to the se-
quential algorithm. The supply driven approach has
the advantage that it distributes work slightly more
quickly than a demand driven approach, since there
is no need for work requests. This may be beneficial
in the beginning of the computation. A major dis-
advantage of this approach is that many subproblems
are transmitted in vain, since they will be sooner or
later discarded at their destination due to better in-
cumbents, in particular for small i. Thus, high com-
munication costs are caused.
The demand-driven approach distributes load only
in case that a neighbor requests it. In our case, a
neighbor sends the lower bound of the best problem
in its work pool (see Fig. 5). If this value is worse
than the lower bound of the second best problem of
the worker receiving this information, it is interpreted
as a work request and a problem is transmitted to the
neighbor. In case that the work pool of the neigh-
bor is empty, the information message indicates this
fact rather than transmitting a lower bound. An in-
formation message is sent every ith iteration of the
main loop. In order to avoid flooding the network
with ”empty work pool” messages, such messages are
never sent twice. If the receiver of an “empty work
pool message” is idle, too, it stores this request and
serves it as soon as possible. The advantage of this
algorithm is that distributing load only occurs, if it
is necessary and beneficial. The overhead of sending
load information messages is very low due to their
small sizes. For small i the overhead is bigger, but
idle processors get work more quickly.
3.4 Termination Detection
In the distributed setting, it is harder to detect that the
computation has finished and the optimal solution has
been found. The termination detection algorithm used
in the DBB-skeleton is a variant of Dijkstra’s algo-
rithm outlined in (Quinn, 1994). Our implementation
utilizes the specific property of MPI that the order in
which messages are received from a sender S is al-
ways equal to the order in which they were sent by S.
This characteristic can be used for the purpose of ter-
mination detection in connection with local load dis-
tribution strategies as described above.
As mentioned, we arrange the workers in a ring
topology, since this renders the termination detection
particularly easy and simplifies the dynamic addition
and removal of workers. For a small number of pro-
cessors (as in our system), the large diameter of the
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
296
0
2
4
6
8
10
12
14
16
18
20
22
1234567891011121314
#workers
centralized workpool
distributed workpool, supply driven work
distribution
distributed workpool, demand driven work
distribution
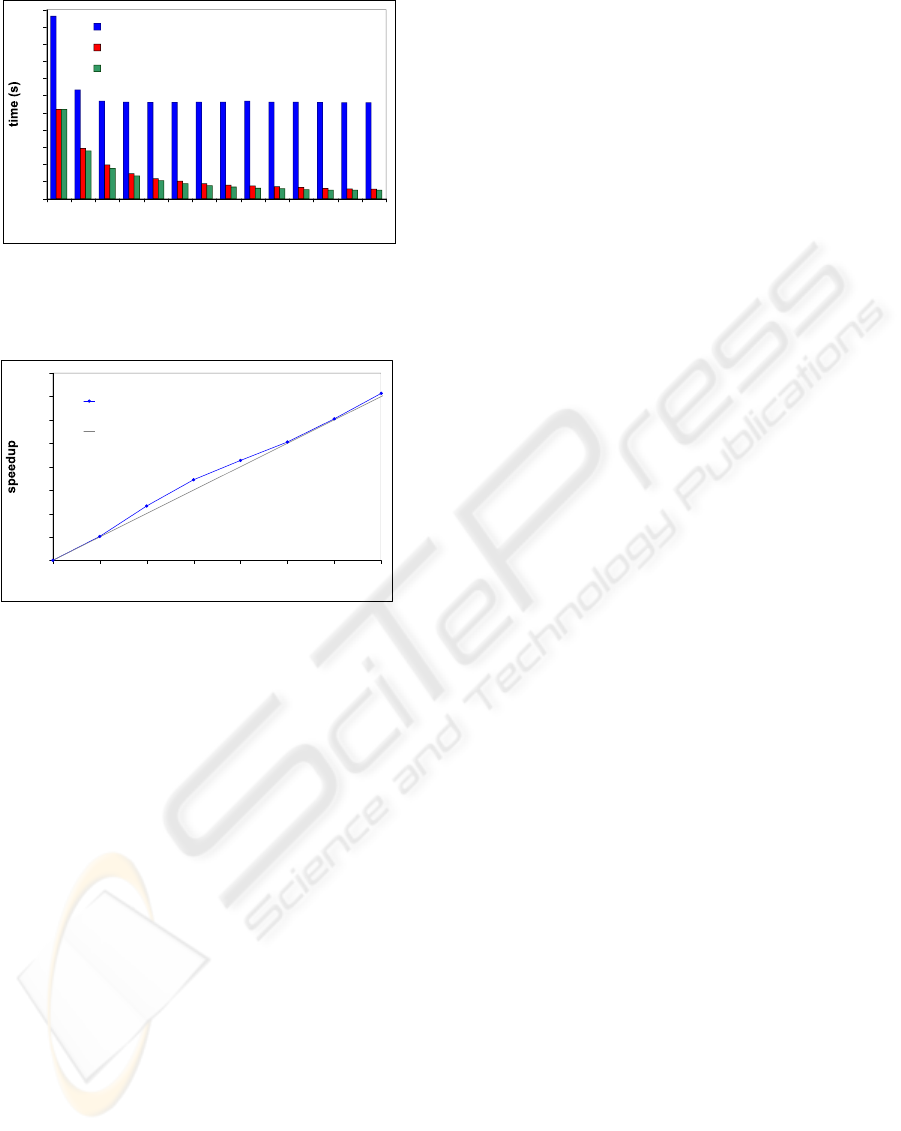
Figure 6: Runtimes for the 16 city TSP using the cen-
tral work pool manager and the distributed work pool with
supply- and demand-driven work distribution depending on
the number of workers.
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
9,00
12345678
#workers
distrributed workpool, demand
driven work distribution
linear speedup
Figure 7: Speedups for the 30 city TSP using the distributed
work pool with demand-driven work distribution depend-
ing on the number of workers. The speedups are the aver-
ages taken from 300 runs with different, randomly gener-
ated maps.
ring topology is no serious problem for the distribu-
tion of work.
Let n be the number of solvers of the DBB-
skeleton. When the master solver receives a new op-
timization problem, it initializes the termination de-
tection by sending a token along the ring in the same
direction as the load is distributed. The token only
consists of an int value. Initially, the token has the
value n. If a solver receives a new subproblem, this
event is noted by setting a flag to true. On arrival of
a token the solver uses the rules stated by the follow-
ing pseudo code:
IF (workpool is empty AND flag == false)
token := token - 1;
IF (workpool is not empty OR flag == true) {
token := n; flag := false; }
IF (token > 0) send token to successor;
IF (token == 0) computation is finished;
Only if all workers are idle, the token is decremented
by every worker and the computation is finished. No
more problems can be in the network, since the token
cannot overtake other messages on its way. Note that
this algorithm only works for load balancing strate-
gies which send load in the same direction as the to-
ken.
4 EXPERIMENTAL RESULTS
We have tested the different versions of the branch &
bound skeleton experimentally on a IBM workstation
cluster (ZIV, 2006) using up to 16 Intel Xeon EM64T
processors with 3.6 GHz, 1 MB L2 Cache, and 4 GB
memory, connected by a Myrinet (Myricom, 2006).
As example applications we have considered the n-
puzzle as explained in section 2 as well as a parallel
version of the traveling salesman problem (TSP) al-
gorithm by Little et al. (J.D.C. Little, 1963). Both
differ w.r.t. the quality of their bounding functions
and hence in the number of considered irrelevant sub-
problems.
The presented B&B algorithm for the n-puzzle has
a rather bad bounding function based on the Manhat-
tan distance of each tile to its destination. It is bad,
since the computed lower bounds are often much be-
low the value of the best solution. As a consequence,
the best-first search strategy is not very effective and
the number of problems considered by the parallel
skeleton differs enormously over several runs with the
same inputs. This number largely depends on the fact
whether a subproblem leading to the optimal solution
is picked up early or late. Note that the parallel al-
gorithm behaves non-deterministically in the way the
search-space tree is explored. In order to get reliable
results, we have repeated each run 100 times and com-
puted the average runtimes.
The goal of the TSP is to find the shortest round trip
through n cities. Little’s algorithm represents each
problem by its residual adjacency matrix, a set of cho-
sen edges representing a partially completed tour, and
a lower bound on the length of any full tour, which
can be generated by extending the given partial tour.
New problems are produced by selecting a key edge
and generating two new problems, in which the cho-
sen edge is included and excluded from the emerging
tour, respectively. The key edge is selected based on
the impact that the exclusion of the edge will have
on the lower bound. The lower bounds are computed
based on the fact that each city has to be entered and
left once and that consequently one value in every row
and column of the adjacency matrix has to be picked.
The processing of a problem mainly requires three
passes through the adjacency matrix.
The TSP algorithm computes rather precise lower
bounds. Thus, the best-first strategy works fine, and
the parallel implementation based on Quinn’s formu-
lation of the algorithm (Quinn, 1994) considers only
very few problems more than the sequential algo-
rithm, as explained below.
ALGORITHMIC SKELETONS FOR BRANCH & BOUND
297
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
12345678
#workers
centralized workpool
distributed workpool, demand
driven work distribution
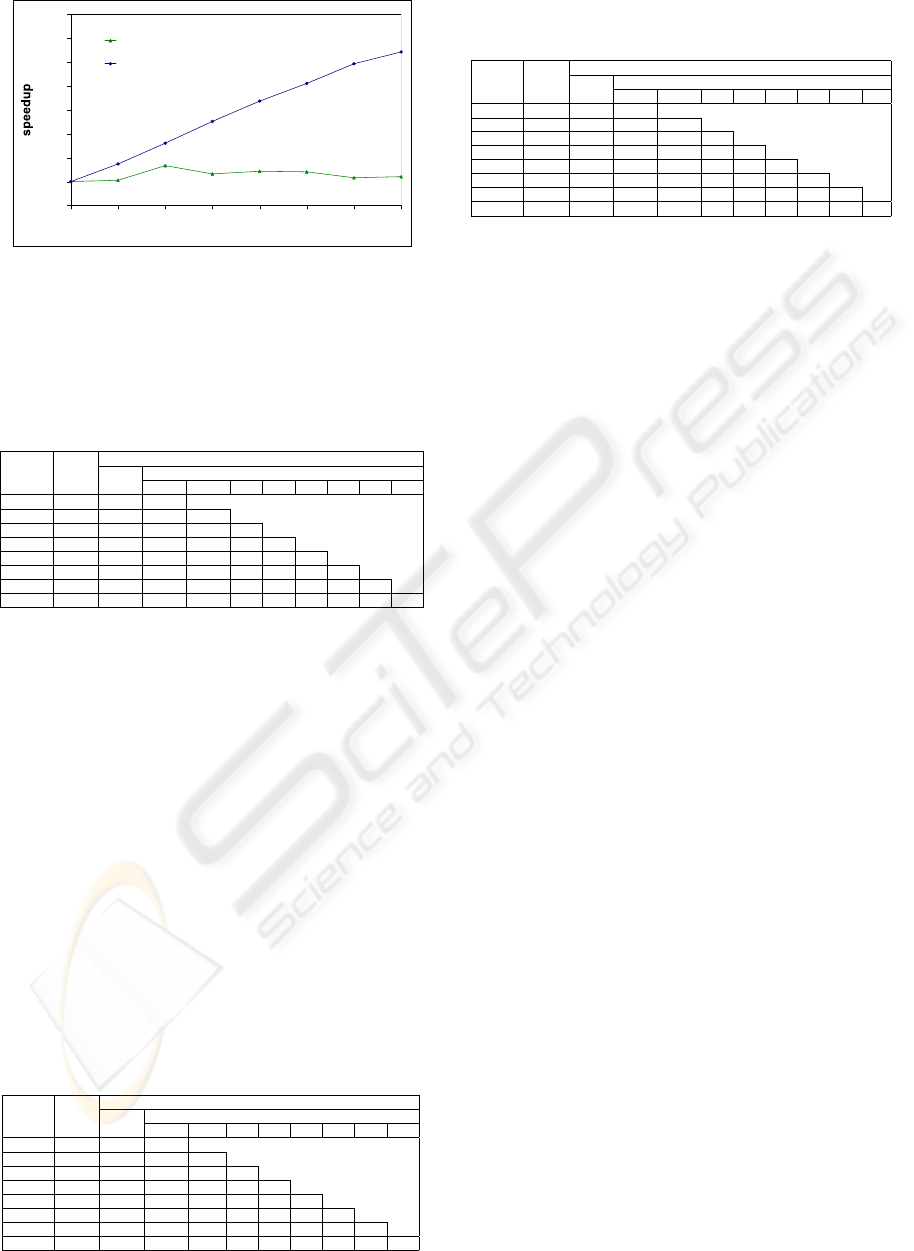
Figure 8: Speedups for 24-puzzle using the central work
pool manager and the distributed work pool with demand-
driven work distribution depending on the number of work-
ers.
Table 1: Distribution of problems for the 16 city TSP using
a distributed work pool and demand driven work distribu-
tion.
# considered problems
#workers runtime worker
(s) total 1 2 3 4 5 6 7 8
1 10.38 263019 263019
2 5.54 274002 139922 134080
3 3.52 263583 90783 86039 86761
4 2.64 262794 66536 65141 65475 65642
5 2.10 273175 55863 52386 55993 53878 55055
6 1.74 270525 45916 45150 44938 45574 42638 46309
7 1.52 263180 39495 38749 37492 37197 37134 36273 36840
8 1.35 265698 34196 33763 33525 32793 32424 32466 32231 34300
Consequently, the runtimes were relatively similar
over several runs with the same parameters. For the
TSP, we have used a real world 16 city map taken and
adapted from (Reinelt, 1991) and 300 randomly gen-
erated 30 city maps. The real world map has much
more sub-tours with similar lengths. Thus, propor-
tionally more subproblems are processed which do
not lead to the optimal solution than for the artificial
map, where the best solution is found more easily.
When comparing the supply- and the demand-
driven approach (see Figure 6 and the 3rd columns
of Tables 1, 2), we notice that, as expected, the de-
mand driven scheme is better, since it produces less
communication overhead. The fact that the problems
are distributed slightly slower causes no serious per-
Table 2: Distribution of problems for the 16 city TSP using
a distributed work pool and supply driven work distribution.
# considered problems
#workers runtime worker
(s) total 1 2 3 4 5 6 7 8
1 10.38 263019 263019
2 5.84 262522 162536 99986
3 3.92 271179 93060 89886 88233
4 2.91 269021 66004 67709 66572 68736
5 2.32 271717 53161 54569 55420 55074 53493
6 2.03 265100 43227 47420 47739 42342 42185 42187
7 1.75 265862 34390 34701 35100 36693 37917 51595 35466
8 1.35 264509 44379 32157 29789 29228 30017 31704 33124 34111
Table 3: Distribution of problems for the 16 city TSP using
a central work pool manager.
# considered problems
#workers runtime worker
(s) total 1 2 3 4 5 6 7 8
1 22.01 263018 263018
2 12.74 267057 133808 133249
3 11.41 267019 116339 104349 46331
4 11.26 267030 115396 103522 45945 2167
5 11.26 267039 116064 103735 45406 1712 106
6 11.25 267199 116082 103679 45470 1791 123 54
7 11.26 267050 114111 103167 46558 2767 319 89 39
8 11.25 267024 115671 103675 45227 2071 226 81 45 28
formance penalty.
For the supply driven scheme, we have used an
optimal number i for the amount of iterations that a
worker waits before delegating a problem to a neigh-
bor. If i is chosen too large, important problems will
not spread out fast enough. If i is too small, the com-
munication overhead will be too large. We found that
the optimal value for i depends on the application
problem and on the number of workers. If the number
of workers increases, i has to be increased as well. In
our experiments, the optimal values for i were ranging
between 2 and 20 for up to 8 workers.
As expected, we see that for the centralized B&B
skeleton the work pool manager quickly becomes a
bottleneck and it has difficulties to keep more than 2
workers busy (see Figures 6, 8 and Table 3). This
is due to the fact that the amount of computations
done for a problem is linear in the size of the prob-
lem, just as the communication complexity for send-
ing and receiving a problem. Thus, relatively little is
gained by delegating a problem to a worker. The work
pool manager has to spend only little work less for
transmitting the problem than its processing would re-
quire. This property is typical for virtually all practi-
cally relevant branch & bound problems we are aware
of. It has the important consequence that a centralized
work pool manager does not work well for branch &
bound on distributed memory machines. Also note
that the centralized scheme needs one more proces-
sor, the work pool manager, than the distributed one
rendering this approach even less attractive.
Both variants of the design with a distributed work
pool do not have these drawbacks (see Figures 6, 7,
8 and Tables 1, 2). Here, the communication over-
head is much smaller. Each worker fetches most prob-
lems from its own work pool, such that they require
no communication. This is particularly true for the
demand driven approach. This scheme has the advan-
tage that after some start-up phase, in which all work-
ers are supplied with problems, there is relatively little
communication and the workers mainly process lo-
cally available problems. This is essential for achiev-
ing good runtimes and speedups. We anticipate that
this insight not only applies to branch & bound but
also to other skeletons with a similar characteristic
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
298

such as divide & conquer and other search skeletons.
We are currently working on experimental results sup-
porting this claim.
Interestingly we could even observe slightly super-
linear speedups for the 30 city TSPs. They can be
explained by the fact that a parallel B&B algorithm
may tackle important subproblems earlier than the se-
quential one, since it processes the state-space tree in
a different order (T. Lai, 1984).
It is clear that a parallel B&B algorithm will typ-
ically consider more problems than a correspond-
ing sequential one, since it eagerly processes several
problems in parallel, which would be discarded in the
sequential case, since their lower bounds are worse
than a detected solution. Interestingly for both con-
sidered example applications, TSP and n-puzzle, the
corresponding overhead was very small and only few
additional problems have been processed by the par-
allel implementation (see the 3rd columns of Tables
1, 2, 3). For instance, for the 16 city TSP no more
than 274002 − 263019 = 10983 additional problems
are processed by the parallel algorithm; this is less
than 4.2 %. This is essential for achieving reasonable
speedups.
As an implementation detail of the centralized ap-
proach let us mention that it is important that the work
pool manager receives in each iteration all available
subproblems and solutions from the workers rather
than just one of them. The reason is that MPI Waitany
(used internally) is unfair and that an overloaded work
pool manager will hence almost exclusively commu-
nicate with a small number of workers. If a starving
worker has an important subproblem (one that leads
to the optimal solution) or a good solution, which it is
not able to deliver to the work pool manager, this will
cause very bad runtimes.
Another implementation detail of the centralized
approach concerns the amount of buffering. In order
to be able to overlap computation and communica-
tion, it is a good idea that the work pool manager not
only sends one problem to each worker and then waits
for the results, but that it sends m problems such that
the worker can directly tackle the next problem af-
ter finishing the previous one. Here it turned out that
one has to be careful not to choose m too large, since
then problems which would otherwise be discarded
due to appearing better incumbents will be processed
(in vain). In our experiments, m = 2 was a good
choice.
5 CONCLUSION
We have considered two different implementation
schemes for the branch & bound skeleton. Besides
a simple approach with a central work pool manager,
we have investigated a scheme with a distributed work
pool. As our analysis and experimental results show,
the communication overhead is high for the central-
ized approach and the work pool manager quickly be-
comes a bottleneck, in particular, if the number of
computation steps for each problem grows linearly
with the problem size, as it is the case for virtually all
practically relevant branch & bound problems. Thus,
the centralized scheme does not work well in practice.
On the other hand, our scheme with a distributed
work pool works fine and provides good runtimes and
scalability. The latter is not trivial, as discussed e.g. in
the book of Quinn (Quinn, 1994), since parallel B&B
algorithms tend to process an increasing number of ir-
relevant problems the more processors are employed.
In particular, the demand-driven design works well
due to its low communication overhead.
For the supply-driven approach, we have investi-
gated, how often a problem should be propagated to a
neighbor. Depending on the application and the num-
ber of workers, we have observed the best runtimes, if
a problem was delegated between every 2nd and every
20th iteration.
We are not aware of any previous comparison of
different implementation schemes of branch & bound
skeletons for MIMD machines with distributed mem-
ory in the literature. In the MaLLBa project (E. Alba,
2002; F. Almeida, 2001), a branch & bound skeleton
based on a master/worker approach and a queue for
storing subproblems has been developed. But as we
pointed out above, this scheme is more suitable for
shared memory machines than for distributed mem-
ory machines. Hofstedt (Hofstedt, 1998) sketches a
B&B skeleton with a distributed work pool. Here,
work is only delegated, if a local work pool is empty.
A quick propagation of “interesting” subproblems are
missing. According to our experience, this leads to a
suboptimal behavior. Moreover, Hofstedt gives only
few experimental results based on reduction steps in
a functional programming setting rather than actual
runtimes and speedups.
As future work, we intend to investigate alternative
implementation schemes of skeletons for other search
algorithms and for divide & conquer.
REFERENCES
A. Benoit, M. Cole, J. H. S. G. (2005). Flexible skeletal pro-
gramming with eskel. In Proc. EuroPar 2005. LNCS
3648, 761–770, Springer Verlag, 2005.
A. Shina, L. K. (1992). A load balancing strategy for
prioritized execution of tasks. In Proc. Workshop
on Dynamic Object Placement and Load Balancing,
ECOOP’92.
Cole, M. (1989). Algorithmic Skeletons: Structured Man-
agement of Parallel Computation. MIT Press.
ALGORITHMIC SKELETONS FOR BRANCH & BOUND
299

Cole, M. (2004). Bringing skeletons out of the closet:
A pragmatic manifesto for skeletal parallel program-
ming. In Parallel Computing 30(3), 389–406.
Cole, M. (2006). The skeletal parallelism web page.
http://homepages.inf.ed.ac.uk/mic/Skeletons/.
E. Alba, F. Almeida, e. a. (2002). Mallba: A library of
skeletons for combinatorial search. In Proc. Euro-Par
2002. LNCS 2400, 927–932, Springer Verlag, 2005.
F. Almeida, I. Dorta, e. a. (2001). Mallba: Branch and
bound paradigm. In Technical Report DT-01-2. Uni-
versity of La Laguna, Spain, Dpto. Estadistica , I.O. y
Computacion.
G. H. Botorog, H. K. (1996). Efficient parallel program-
ming with algorithmic skeletons. In Proc. Euro-
Par’96. LNCS 1123, 718–731, Springer Verlag, 1996.
G. H. Botorog, H. K. (1998). Efficient high-level parallel
programming. In Theoretical Computer Science 196,
71–107.
G.L. Nemhauser, L. W. (1999). Integer and combinatorial
optimization. Wiley.
H. Kuchen, R. Plasmeijer, H. S. (1994). Efficient distributed
memory implementation of a data parallel functional
language. In Proc. PARLE’94. LNCS 817, 466–475,
Springer Verlag.
H. Kuchen, M. C. (2002). The integration of task and
data parallel skeletons. In Parallel Processing Letters
12(2), 141–155.
Henrich, D. (1994a). Initialization of parallel branch-and-
bound algorithms. In Proc. 2nd International Work-
shop on Parallel Processing for Artificial Intelligence
(PPAI-93). Elsevier.
Henrich, D. (1994b). Local load balancing for data-parallel
branch-and-bound. In Proc. Massively Parallel Pro-
cessing Applications and Development, 227-234.
Henrich, D. (1995). Lastverteilung fuer feinkoernig par-
allelisiertes branch-and-bound. In PhD Thesis. TH
Karlsruhe.
Hofstedt, P. (1998). Task parallel skeletons for irregu-
larly structured problems. In Proc. EuroPar’98. LNCS
1470, 676 – 681, Springer Verlag.
I. Dorta, C. Leon, C. R. A. R. (2003). Parallel skeletons for
divide and conquer and branch and bound techniques.
In Proc. 11th Euromicro Conference on Parallel, Dis-
tributed and Network-based Processing (PDP2003).
J. Clausen, M. P. (1999). On the best search strategy in par-
allel branch-and-bound: Best-first search versus lazy
depth-first search search. In Annals of Operations Re-
search 90, 1-17 .
J.D.C. Little, K.G. Murty, D. S. C. K. (1963). An algorithm
for the traveling salesman problem. In Operations Re-
search 11, 972–989 .
Kuchen, H. (2002). A skeleton library. In Euro-Par’02.
LNCS 2400, 620–629, Springer Verlag.
Kuchen, H. (2004). Optimizing sequences of skeleton
calls. In Domain-Specific Program Generation. LNCS
3016, 254–273, Springer Verlag.
Kuchen, H. (2006). The skeleton li-
brary web pages. http://www.wi.uni-
muenster.de/PI/forschung/Skeletons/index.php.
MPI (2006). Message passing interface forum, mpi.
In MPI: A Message-Passing Interface Standard.
http://www.mpi-forum.org/docs/mpi-11-html/mpi-
report.html.
Myricom (2006). The myricom homepage.
http://www.myri.com/.
N. Mahapatra, S. D. (1998). Adaptive quality equaliz-
ing: High-performance load balancing for parallel
branch-and-bound across applications and computing
systems. In Proc. International Parallel Processing
and Distributed Processing Symposium (IPDPS98).
Pelagatti, S. (2003). Task and data parallelism in p3l. In
Patterns and Skeletons for Parallel and Distributed
Computing. eds. F.A. Rabhi, S. Gorlatch, 155–186,
Springer Verlag.
Quinn, M. (1994). Parallel Computing: Theory and Prac-
tice. McGraw Hill.
R. Bisseling, I. F. (2005). Mondriaan sparse matrix parti-
tioning for attacking cryptosystems – a case study. In
to appear in Proceedings of ParCo 2005, Malaga.
R. L
¨
uling, B. M. (1992). Load balancing for distributed
branch and bound algorithms. In Proc. 6th Interna-
tional Parallel Processing Symposium (IPPS92), 543-
549. IEEE.
Reinelt, G. (1991). Tsplib – a traveling salesman
problem library. In ORSA Journal on Comput-
ing 3, 376–384. see also: http://www.iwr.uni-
heidelberg.de/groups/comopt/software/TSPLIB95/
(gr17).
Sanders, P. (1998). Tree shaped computations as a model
for parallel applications. In Proc. Workshop on Appli-
cation Based Load Balancing (ALV’98). TU Munich.
T. Lai, S. S. (1984). Anomalies in parallel branch-and-
bound algorithms. In Communications of the ACM
27, 594–602.
Trienekens, H. (1990). Parallel branch & bound algorithms.
In PhD Thesis. University of Rotterdam.
W. Gropp, E. Lusk, A. S. (1999). Using MPI. MIT Press.
Y. Shinano, M. Higaki, R. H. (1995). A generalized util-
ity for parallel branch and bound algorithms. In Proc.
7th IEEE Symposium on Parallel and Distributed Pro-
cessing, 392–401. IEEE.
Y. Shinano, M. Higaki, R. H. (1997). Control schemes in a
generalized utility for parallel branch and bound algo-
rithms. In Proc. 11th International Parallel Process-
ing Symposium, 621–627. IEEE.
Y. Xu, T. Ralphs, L. L. M. S. (2005). Alps: A framework
for implementing parallel tree search algorithms. In
Proc. 9th INFORMS Computing Society Conference.
ZIV (2006). Ziv-cluster. http://zivcluster.uni-muenster.de/.
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
300
