
FROM STATIC TO DYNAMIC PROCESS TYPES
Franz Puntigam
Technische Universit
¨
at Wien
Argentinierstr. 8, 1040 Vienna, Austria
Keywords:
Process types, synchronization, type systems, race-free programs.
Abstract:
Process types – a kind of behavioral types – specify constraints on message acceptance for the purpose of
synchronization and to determine object usage and component behavior in object-oriented languages. So far
process types have been regarded as a purely static concept for Actor languages incompatible with inherently
dynamic programming techniques. We propose solutions of related problems causing the approach to become
useable in more conventional dynamic and concurrent languagues. The proposed approach can ensure message
acceptability and support local and static checking of race-free programs.
1 INTRODUCTION
Process types (Puntigam, 1997) represent a behav-
ioral counterpart to conventional object types: They
support subtyping, genericity, and separate compila-
tion as conventional types. Additionally they spec-
ify abstractions of object behavior. Abstract behav-
ior specifications are especially desirable for software
components, and they can be used for synchroniza-
tion. Both concurrent and component-based program-
ming are quickly becoming mainstream programming
practices, and we expect concepts like process types
to be important in the near future. However, so far
process types are not usable in mainstream languages:
1. Their basis are active objects communicating by
message passing (Agha et al., 1992). Variables
are accessible only within single threads. In main-
stream languages like Java, threads communicate
through shared (instance) variables; one thread
reads values written by another. To support such
languages we must extend process types with sup-
port of shared variables.
2. Process types are static. Object state changes must
be anticipated at compilation time. We must adapt
process types to support dynamic languages like
Smalltalk (using dynamic process type checking).
Support of dynamic languages turns out to be a good
basis for supporting communication through shared
variables. Hence, we address mainly the second issue
and show how dynamic type checking can deal with
the first issue.
We introduce the basic static concept of process
types for a conventional (Java-like) object model in
Section 2. Then, we add support of dynamic synchro-
nization in Section 3 and of shared variables with late
type checking in Section 4. Local and static checking
of race-free programs is rather easy in our setting as
discussed in Section 5.
2 STATIC PROCESS TYPES
Figure 1 shows the grammar of TL1 (Token Lan-
guage 1) – a simple Java-like language we use as
showcase. We differentiate between classes and types
without implementations. To create a new object we
invoke a creator new in a class. Type annotations fol-
low after “:”. Token declarations (names following
the keyword token), tokens occurring within square
brackets in types, and with-clauses together deter-
mine the statically specified object behavior.
The first example shows how tokens allow us to
specify constraints on the acceptability of messages:
type Buffer is
token empty filled
put(e:E with empty->filled)
get(with filled->empty): E
According to the with-clause in put we can invoke
putonly if we have an empty; this token is removed
21
Puntigam F. (2006).
FROM STATIC TO DYNAMIC PROCESS TYPES.
In Proceedings of the First International Conference on Software and Data Technologies, pages 21-28
DOI: 10.5220/0001312900210028
Copyright
c
SciTePress

P ::= unit*
unit ::= class c [< c
+
]
opt
is [token x
+
]
opt
def
+
|
type c [< c
+
]
opt
is [token x
+
]
opt
decl
+
decl ::= m(par* [with ctok]
opt
)[:t]
opt
def ::= v :c | decl do s
+
| new(par* ):t do s
+
par ::= v :c [[ctok]]
opt
ctok ::= tok
+
->tok* | ->tok
+
tok ::= x [.n]
opt
t ::= c [[tok
+
]]
opt
s ::= v :t =e | v =e | e | return [e]
opt
| fork e
e ::= this | v | c | n | e.m(e* ) | null
c ∈ class and type names
x ∈ token names
m ∈ message selectors
v ∈ variable names
n ∈ natural number literals
Figure 1: Syntax of TL1.
on invocation, and filled is added on return. For
x of type Buffer[empty] – a buffer with a single
token empty – we invoke x.put(..). This invo-
cation changes the type of x to Buffer[filled].
Next we invoke x.get(), then x.put(..), and
so on. Static type checking enforces put and get to
be invoked in instances of Buffer[empty] in al-
ternation. Type checking is simple because we need
only compare available tokens with tokens required
by with-clauses and change tokens as specified by
with-clauses (Puntigam, 1997).
The type Buffer[empty.8 filled.7] de-
notes a buffer with at least 8 filled and 7 empty slots.
An instance accepts put and get in all sequences
such that the buffer never contains more that 15 or
less than zero elements as far as the client knows.
In the next example we show how to handle tokens
in parameter types similarly as in with-clauses:
class Test is
play(b:Buffer[filled->filled])
do e:E = b.get() -- b:Buffer[empty]
e = e.subst() -- another e
b.put(e) -- b:Buffer[filled]
copy(b:Buffer[empty filled->filled.2])
do e:E = b.get() -- b:Buffer[empty.2]
b.put(e) -- b:Buffer[empty filled]
b.put(e) -- b:Buffer[filled.2]
Let y be of type Buffer[empty.2 filled.2]
and x of type Test. We can invoke x.play(y)
since y has the required token filled. This rou-
tine gets an element from the buffer, assigns it to the
local variable e (declared in the first statement), as-
signs a different element to e, and puts this element
into the buffer. Within play the buffer is known
to have a single filled slot on invocation and on re-
turn. For the type of b specified in the formal pa-
rameter list it does not matter that the buffer has been
empty meanwhile and the buffer contents changed.
After return from play variable y is still of type
Buffer[empty.2 filled.2].
Invocations of copy change argument types: On
return from x.copy(y) variable y will be of type
Buffer[empty filled.3]. Removing tokens
to the left of -> on invocation causes the type to be-
come Buffer[empty filled], and adding the
tokens to the right on return causes it to become
Buffer[empty filled.3].
Parameter passing does not produce or consume to-
kens. Tokens just move from the argument type to the
parameter type on invocation and vice versa on return.
Only with-clauses can actually add tokens to and re-
move them from an object system. This is a basic
principle behind the idea of tokens: Each object can
produce and consume only its own tokens.
A statement ‘fork x.copy(y)’ spawns a new
thread executing x.copy(y). Since the execution
continues without waiting for the new threads, in-
voked routines cannot return tokens. The type of y
changes from Buffer[empty.2 filled.2] to
Buffer[empty filled]. The type of y is split
into two types – the new type of y and the type of b.
Both threads invoke routines in the same buffer with-
out affecting each other concerning type information.
Assignment resembles parameter passing in the
case of spawning threads: We split the type of an
assigned value into two types such that one of the
split types equals the current static type of the vari-
able, and the remaining type becomes the new type of
the assigned value. Thereby, tokens move from the
value’s to the variable’s type. If the statically evalu-
ated type of v is Buffer[empty.2] and y is of
type Buffer[empty.2 filled.2], then v=y
causes y’s type to become Buffer[filled.2].
Local variables are visible in just a single thread of
control. This property is important because it allows
us to perform efficient type checking by a single walk
through the code although variable types can change
with each invocation. Because of explicit formal pa-
rameter types we can check each class separately. If
variables with tokens in their types were accessible
in several threads, then we must consider myriads of
possible interleavings causing static type checking to
become practically impossible. Instance variables can
be shared by several threads. To support instance vari-
ables and still keep the efficiency of type checking we
require their types to carry no token information. We
address this restriction in Section 4.
Explicit result types of creators play a quite impor-
tant role for introducing tokens into the system:
class Buffer1 < Buffer is
s:E -- single buffer slot
put(e:E with empty->filled) do s=e
get(with filled->empty):E do return s
new(): Buffer1[empty] do null
Class Buffer1 inherits empty and filled from
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
22

def ::= v :c | decl [when ctok]
opt
do s
+
|
new(par* ):t [-> tok
+
]
opt
do s
+
Figure 2: Syntax of TL2 (Differences to TL1).
Buffer. An invocation of Buffer1.new() re-
turns a new instance with a single token empty. No
other token is initially available. Since invocations of
put and get consume a token before they issue an-
other one, there is always at most one token for this
object. No empty buffer slot can be read and no filled
one overwritten, and we need no further synchroniza-
tion even if several threads access the buffer. The
use of tokens greatly simplifies the implementation.
However, this solution is inherently static and does
not work in more dynamic environments.
3 DYNAMIC TOKENS
The language TL2 (see Figure 2) slightly extends
TL1 with dynamic tokens for synchronization. This
concept resembles more conventional synchroniza-
tion like that in Java. There is no need to anticipate
such synchronization at compilation time.
We associate each object with a multi-set of tokens
(token set for short) to be manipulated dynamically.
TL2 differs from TL1 by optional when-clauses in
routines and optional initial dynamic tokens (follow-
ing ->) in creators. Tokens to the left of ->in when-
clauses must be available and are removed before ex-
ecuting the body, and tokens to the right are added on
return. Different from with-clauses, when-clauses
require dynamic tokens to be in the object’s token set
and change this token set. If required dynamic tokens
are not available, then the execution is blocked until
they become available. Checks for token availabil-
ity occur only at run time. The following variant of
the buffer example uses static tokens to avoid buffer
overflow and underflow, and dynamic tokens to en-
sure mutual exclusion:
class Buffer50 < Buffer is
token sync
lst: List
new(): Buffer50[empty.50] ->sync do
lst = List.new()
put(e:E with empty->filled)
when sync->sync do lst.addLast(e)
get(with filled->empty): E
when sync->sync do
return lst.getAndDeleteFirst()
The creator introduces just a single token sync. Both
putand getremove this token at the begin and issue
a new one on return. Clients need not know about the
mutual exclusion of all buffer operations. Of course
decl ::= m(v* [with ctok]
opt
)
def ::= v: | decl [when ctok]
opt
do s
+
|
new(v* ):t [-> tok
+
]
opt
do s
+
s ::= v :=e | v =e | e | return [e]
opt
| fork e
Figure 3: Syntax of TL3 (Differences to TL1–TL2).
we could use only dynamic tokens which is more
common and provides easier handling of buffers.
Static and dynamic tokens live in mostly indepen-
dent worlds. Nonetheless we have possibilities to
move tokens from the static to the dynamic world and
vice versa as shown in the following example:
class StaticAndDynamic is
token t
beDynamic(with t->) when ->t do null
beStatic(with ->t) when t-> do null
new(): StaticAndDynamic[t] do null
There always exists only a single token t for each
instance, no matter how often and from how many
threads we invoke beDynamic and beStatic.
The major advantage of our approach compared to
concepts like semaphores and monitors is the higher
level of abstraction. It is not so easy to “forget” to
release a lock as often occurs with semaphores, and
it is not necessary to handle wait queues using wait
and notify commands as with monitors. For static
tokens we need not execute any specific synchroniza-
tion code at all. This synchronization is implicit in the
control flow.
4 DYNAMIC TYPING
In TL1 and TL2 we constrained the flexibility of the
language to get efficient static type checking: Types
of instance variables cannot carry tokens. In this sec-
tion we take the position that static type checking is
no precondition for the token concept to be useful.
We want to increase the language’s flexibility (by sup-
porting tokens on instance variables) and nonetheless
ensure that synchronization conditions expressed in
with-clauses are always satisfied. An error shall be
reported before invocations if required tokens are not
available.
Figure 3 shows the grammar of TL3 that differs
form TL2 just by missing type annotations on for-
mal parameters and declarations. However, without
type annotations there is no explicit information about
available tokens. We handle this information dynam-
ically. One kind of type annotation is left in TL3:
Types of new instances returned by creators must be
specified explicitly because tokens in this type to-
gether with with-clauses determine which routines
can be invoked. Such types are part of behavior spec-
ifications. Except of type annotations the following
example in TL3 equals Buffer50:
FROM STATIC TO DYNAMIC PROCESS TYPES
23

type BufferDyn is
token empty filled
put(e with empty->filled)
get(with filled->empty)
class Buffer50Dyn < BufferDyn is
token sync
lst:
new():Buffer50Dyn[empty.50]->sync do
lst = List.new()
put(e with empty->filled)
when sync->sync do lst.addLast(e)
get(with filled->empty)
when sync->sync do
return lst.getAndDeleteFirst()
The following example gives an intuition about the
use of static tokens in a dynamic language. An open
window is displayed on a screen or shown as icon:
type Window is
token displ icon closed
setup(with closed->displ)
iconify(with displ->icon)
display(with icon->displ)
close(with displ->closed)
class WindowImpl < Window is
new(): WindowImpl[closed] do ...
...
class WManager is
win:
new(w):WManager do win=w win.setup()
onButton1() do win.iconify()
onButton2() do win.close()
onButton3() do win.display()
Some state changes (directly from an icon to closed,
etc.) are not supported. Class WManager specifies
actions to be performed when users press buttons.
Under the assumption that a displayed window has
only Button 1 and 2 and an icon only Button 3 the
constraints on state changes are obviously satisfied.
Since the assumption corresponds to the existence of
at most one token for each window we need nothing
else to ensure a race-free program. We express the
assumption by with-clauses and dynamically ensure
them to be satisfied. The variable win must be asso-
ciated with a (static) token specifying the window’s
state. In TL1 and TL2 we cannot express such type
information that is implicit in TL3.
TL3 deals with dynamic tokens in the same way
as TL2. To dynamically handle information about
available static tokens we consider two approaches
– TL3flex as a simple and flexible approach, and
TL3strict as a more restrictive and safer approach.
TL3flex. In TL3flex we tread static tokens in a sim-
ilar way as dynamic tokens: Each objects contains a
pool of static tokens. On invocations tokens to the
left of -> in with-clauses are taken from the pool,
and on return those to the right are added to the pool.
An error is reported if the pool does not contain all
required tokens.
This approach is very flexible. Each thread can use
all previously issued static tokens no matter which
thread caused the tokens to be issued. A disadvantage
is a low quality of error messages because there is no
information about the control flow causing tokens not
to be available. Furthermore, there is a high probabil-
ity for program runs not to uncover synchronization
problems. Thus, program testing is an issue.
TL3strict. To improve error messages and the prob-
ability of detecting problems we dynamically sim-
ulate static type checking: Instead of storing static
tokens centralized in the object we distribute them
among all references to the object. On invocation we
check and update only tokens associated with the cor-
responding reference. We must find an appropriate
distribution of tokens among references. In TL1 and
TL2 the programmer had to determine the distribution
by giving type annotations. In TL3strict we distribute
tokens lazily as needed in the computation.
Instead of splitting a token set on parameter passing
or assignment we associate the two references with
pointers to the (unsplit) token set as well as with a
new empty token set for each of the two references.
Whenever required tokens are not available in the (af-
ter assignment or parameter passing empty) token set
of a reference we follow the pointers and take the to-
kens where we find them. New tokens are stored in
the references’ own token sets. This way all refer-
ences get the tokens they need (if available) and we
need not foresee how to split token sets. Repeated
application leads to a tree of token sets with pointers
from the leaves (= active references) toward the root
(= token set returned by creator). We report an error
only if tokens required at a leaf cannot be collected
from all token sets on the path to the root. On return
of invocations we let actual parameters point to token
sets of corresponding formal parameters.
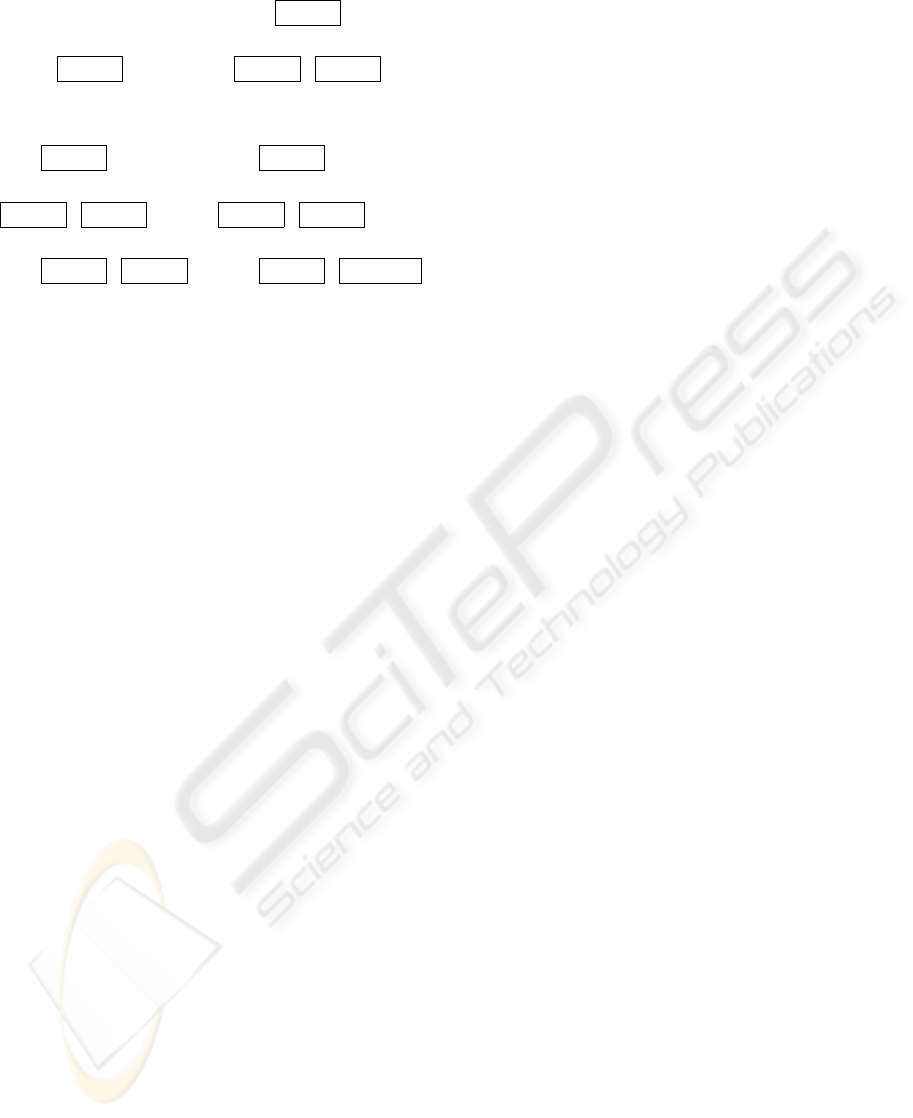
Figure 4 shows an example: Immediately after cre-
ating a window there is only one reference n to it (a).
The box contains the single token in the correspond-
ing token set. When invoking new in WManager us-
ing nas actual parameter we construct new token sets
for n and for the formal parameter w (b). When the
creator assigns w to win we add new token sets for
w and win (c). An invocation of setup on win re-
moves the token closed and adds displ. On re-
turn from the creator we let the token set of n point
to that of w (d). Now only win carries the single to-
ken. We cannot change the window’s state through
n. Therefore, TL3strict is safer and less flexible than
TL3flex.
We can build large parts of the structures shown in
Figure 4 already at compilation time by means of ab-
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
24
n := WindowImpl.new()
WManager.new(n)
closed
n
(a)
closed
ǫ ǫ
@
@I
n
w
(b)
closed
ǫ ǫ
@
@I
n
ǫ ǫ
@
@I
w
win
(c)
ǫ
ǫ ǫ
@
@R
@
@I
n
ǫ
displ
@
@I
w
win
(d)
Figure 4: Token Sets per Reference.
stract interpretation. Most checks for the availability
of tokens can be performed statically. In fact we need
dynamic checks of token availability only for tokens
associated with instance variables.
5 RACE-FREE PROGRAMS
It is possible to ensure race-free programs just by ana-
lyzing the tokens in classes. We use only a single suf-
ficient (but not always necessary) criterion: No two
preconditions in with-clauses and when-clauses of
routines accessing the same variable (where an access
is a write) can be satisfied at the same time. To check
this criterion we compute upper bounds on the token
sets that can be constructed from the tokens of new
instances. We analyze each class separately.
In the following description of the algorithm to de-
termine upper bounds of token sets we first consider
only static tokens as in TL1. We start with the set
of token sets declared in the result types of the ana-
lyzed class’ creators (one token set per creator). For
each with-clause in the class we repeatedly construct
new token sets by removing tokens to the left of ->
and adding those to the right from/to each token set
constructed so far containing all required tokens. If a
token set contains all tokens occurring in another to-
ken set, then we remove the smaller token set. And
if a token set differs from the token set from which it
was constructed just by containing more tokens, then
we increment the token numbers that differ to the spe-
cial value ∞ indicating infinite grow. Because of this
treatment the algorithm always reaches a fixed point.
The algorithm is accurate in the sense that
• the token set produced for an instance of the class
is always a subset of a token set returned by the
algorithm,
• if a token set returned by the algorithm does not
contain ∞, then there exists a sequence of invoca-
tions producing exactly this token set,
• and if a token set returned by the algorithm contains
∞, then there exist invocation sequences producing
corresponding tokens without upper bounds.
In TL2 and TL3 we must consider static and dy-
namic tokens together to get most accurate results.
Since the static and the dynamic world are clearly
separated, static and dynamic tokens must not be in-
termixed. We have to clearly mark each token as ei-
ther static or dynamic (for example, by an index) and
regard differently marked tokens as different. The al-
gorithm starts with one token set for each creator con-
taining both static and dynamic tokens. A new token
set is constructed by simultaneously removing and
adding tokens as specified in the with- and when-
clause of a routine. The result shows which dynamic
tokens can exist together with static tokens. For ex-
ample, applied to StaticAndDynamic (see Sec-
tion 3) the algorithm returns two token sets, one con-
taining only a static token t and the other only a dy-
namic token t; in this case no dynamic token can exist
at the same time as a static one.
Once we know the upper bounds it is easy to per-
form our check of race-free programs as shown in the
following pseudo-code:
let U be the upper-bound set of token sets of class c;
for each instance variable v of c
for each routine r write-accessing v
for each routine s (read or write) accessing v
let p be the union of the token sets
to the left of -> in r and s;
if there is a u ∈ U containing all tokens in p
then issue a warning about a potential race;
otherwise c is race-free
As an example we apply this check to Buffer1
(see Section 2). As upper-bound set of token sets S
we have {{empty}, {filled}}; there is always at
most one token empty or filled. The only in-
stance variable s is written in put and read in get.
Hence, r ranges just over put, s over put and get,
and p over {empty.2} and {empty, filled}. The
class is race-free because no token set in S contains
two empty or an empty and a filled.
The set S can become quite large because of com-
binatorial explosion. For example, S constructed for
Buffer50Dyn contains 51 different token sets – all
possibilities of summing up tokens of two names to
50 tokens. Fortunately, a simple change in the algo-
rithm to compute upper bounds can reduce the size of
S considerably: When computing the fixed point we
replace all token numbers larger than 2 · n
2
· i by ∞,
where n is the largest total number of tokens to the
left of -> in the with- and when-clause of the same
routine, and i is the number of different token names
FROM STATIC TO DYNAMIC PROCESS TYPES
25

in the class. For Buffer50Dyn we have n = 2,
i = 3, 2 · n
2
· i = 24, and S contains just a sin-
gle token set {sync, empty.∞, filled.∞}. This
optimization does not change the output of the race-
freeness check: Soundness is not affected because the
multi-set of supposedly reachable tokens in a system
can just get larger. No token set p (as in the algorithm)
can contain more than 2 · n tokens, and a single token
of some name can be generated from no more than n·i
tokens of another name. Therefore, more than 2 ·n
2
·i
tokens of one name can be ignored for our purpose.
Probably there are more accurate estimations, but we
expect this simple one to be sufficient because token
numbers to the left of -> are usually small.
All information needed to check race-free classes
is explicit in TL1, TL2, and TL3. We need no infor-
mation about formal parameter types and no aliasing
information. No global program analysis is necessary.
6 DISCUSSION, RELATED WORK
The idea of integrating process types into dynamic
languages is new and at a first glance unexpected be-
cause such types were developed to move dynamic
aspects like synchronization to the static language
level whenever possible (Puntigam, 1995; Puntigam,
1997; Puntigam, 2000). In some sense the integration
of more advanced static concepts into dynamic lan-
guages is a consistent further development allowing
us to use the appropriate (static or dynamic) concept
for each task. Such integration helps us to deepen our
understanding of related concepts.
We usually regard synchronization of concurrent
threads as a purely dynamic concept: If there is a
dependence between two control flows, then one of
the corresponding threads must wait until the other
thread has caught up to meet the synchronization
point. Since threads usually run asynchronously and
at statically unpredictable speed, it is only possible to
decide at run time whether a thread must wait at a syn-
chronization point. However, these considerations are
valid only at a very low level (close to the hardware)
point of view. From the programmers’ higher level
point of view it is quite often not clear whether there
exist dependences between threads or not. Using ex-
plicit synchronization as with monitors, semaphores,
rendezvous communication, etc. programmers must
add much more synchronization points than are ac-
tually necessary. There are optimization techniques
that can statically eliminate up to about 90% (about
60% in average) of all locks from Java programs and
thereby considerably improve program performance
(von Praun and Gross, 2003). Probably even more
synchronization points are actually not necessary.
Current programming languages allow program-
mers to write programs with races although there are
many proposals to ensure race-free programs (Ba-
con et al., 2000; Boyapati and Rinard, 2001; Brinch-
Hansen, 1975; Flanagan and Abadi, 1999). Applica-
tions of such techniques may lead to further increase
of unnecessary synchronization because no approach
can accurately decide between necessary and unnec-
essary locks. Nonetheless, these techniques are very
useful because races are an important practical prob-
lem in concurrent programming.
Process types were developed as abstractions over
expressions in process calculi (Puntigam, 1995).
These abstractions specify acceptable messages of
active objects and allow the acceptability to change
over time (thereby specifying synchronization con-
straints). Static type checking ensures that only ac-
ceptable messages can be sent and enforces all syn-
chronization constraints to be satisfied. In this sense
type checking in process types has a similar purpose
as ensuring race-free programs. However, process
types allow us to specify arbitrary constraints on mes-
sage acceptability, not just synchronization necessary
to avoid races. In fact, the underlying calculi do not
support shared data that could suffer from races.
There is a clear tendency toward more and more
complex interface specifications going far beyond
simple signatures of available routines (Arbab, 2005;
de Alfaro and Henzinger, 2001; Heuzeroth and Reuss-
ner, 1999; Jacobsen and Kr
¨
amer, 1998; Lee and
Xiong, 2004; Mezini and Ostermann, 2002; Nier-
strasz, 1993; Plasil and Visnovsky, 2002; Yellin and
Strom, 1997). We consider such interfaces to be
partial specifications of object behavior (Liskov and
Wing, 1993). They are especially valuable to specify
the behavior of software components as far as needed
for component composition. Process types are use-
ful as partial behavior specifications (Puntigam, 2003;
S
¨
udholt, 2005). We regard behavior specifications as
the major reason for using process types.
Pre- and postconditions in with-clauses allow us
to specify a kind of contracts between components
(Meyer, 1997; Meyer, 2003). Such contracts clearly
specify responsibilities of software and help us to
move responsibilities from one component to another.
For example, we move the responsibility of proper
synchronization from the server to the client if we use
with-clauses instead of when-clauses.
Behavioral types and synchronization of concur-
rent threads are related topics: Specifications of ob-
ject behavior cannot ignore necessary synchroniza-
tion if we expect components composed according to
their behavioral types to work together in concurrent
environments, and constraints on message acceptabil-
ity specify a kind of synchronization. The present
work allows programmers to decide between synchro-
nization globally visible through the interface (with-
clauses) and local synchronization regarded as an im-
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
26

plementation detail (when-clauses). While with-
clauses just ensure that clients coordinate themselves
(for example, through the control flow allowing m2()
to be invoked only after m1()) when-clauses ensure
proper synchronization using more conventional tech-
niques. Locking does not get visible in interfaces, just
synchronization requirements are visible.
There are good reasons for using locking only for
local synchronization: Uncoordinated locking easily
leads to deadlocks and other undesirable behavior,
and it is much easier to coordinate locking within a
single unit. The monitor concept supports just lo-
cal locking for similar reasons. Furthermore, it is
very difficult to deal with globally visible locking
at the presence of subtyping and inheritance (Mat-
suoka and Yonezawa, 1993). Process types express
just synchronization conditions in interfaces, they do
not provide for locking. Another approach directly
expresses locking conditions in interfaces (Caromel,
1993; Meyer, 1993). As experience shows, that ap-
proach easily leads to undesirable locking where it
would be more appropriate to raise exceptions.
There are several approaches similar to process
types. Nierstrasz (Nierstrasz, 1993) and Nielson and
Nielson (Nielson and Nielson, 1993) define behav-
ioral types where subtypes show the same deadlock
behavior as supertypes, but message acceptability is
not ensured. Many further approaches consider dy-
namic changes of message acceptability, but do not
guarantee message acceptability in all cases (Car-
omel, 1993; Colaco et al., 1997; Kobayashi and
Yonezawa, 1994; Meyer, 1993; Ravara and Vasconce-
los, 1997). Well known in the area of typed π-calculi
(Milner et al., 1992) is the work of Kobayashi, Pierce
and Turner on linearity (Kobayashi et al., 1999) which
ensures all sent messages to be acceptable. Work of
Najm and Nimour (Najm and Nimour, 1997) is very
similar to process types except that in their approach
at each time only one user can interact with an ob-
ject through an interface (no type splitting). These
approaches specify constraints on the acceptability
of messages in a rather direct way and do not make
use of a token concept. The use of tokens in be-
havior specifications gives us high expressiveness and
flexibility, allows us to express synchronization in a
way similar to well-known concepts like monitors and
semaphores, and is easily understandable.
7 CONCLUSION
Behavioral types like process types gain more and
more importance especially together with component
composition. By partially specifying object behav-
ior these types express synchronization in the form of
software contracts clearly determining who is respon-
sible for proper synchronization. Process types use
simple token sets as abstractions over object states.
In this paper we explored how to add process types
to rather conventional object-oriented programming
languages. As a showcase we developed the lan-
guages TL1 to TL3. Static type checking in TL1 en-
sures that all conditions in with-clauses are satisfied,
this is, all required tokens are available. We can syn-
chronize concurrent threads just by waiting for mes-
sages. To overcome the restriction, TL2 adds a new
dynamic concept of synchronization based on token
sets. Neither TL1 nor TL2 can deal with static token
sets associated with instance variables because of pos-
sible simultaneous accesses by concurrent threads. In
TL3 we dispense with static types and apply one of
two methods to dynamically ensure the availability of
required tokens – a flexible method and one with bet-
ter error messages and partial support of static type
checking. All variables in TL3 have only dynamic
types that can implicitly carry tokens. In the three lan-
guages we can ensure race-free programs by check-
ing each class separately, without any need of global
aliasing information.
Our approach uses token sets for several related
purposes – synchronization of concurrent threads and
statically and dynamically checked abstract behavior
specifications. It is a major achievement to integrate
these concepts because of complicated interrelations.
The integration is valuable because it gives software
developers much freedom and at the same time clear
contracts and type safety.
Much work on this topic remains to be done. For
example, currently our algorithm can issue warnings
about potential races even in purely sequential pro-
gram parts. Many other approaches to ensure race-
free programs put much effort into detecting sequen-
tial program parts. By integrating such approaches
into our algorithm we expect to considerably improve
the accuracy. Most approaches to remove unneces-
sary locking from concurrent programs also work on
sequential program parts (Choi et al., 1999; von Praun
and Gross, 2003; Vivien and Rinard, 2001). We ex-
pect a combination of the techniques to improve run
time efficiency.
REFERENCES
Agha, G., Mason, I. A., Smith, S., and Talcott, C. (1992).
Towards a theory of actor computation. In Proceed-
ings CONCUR’92, number 630 in Lecture Notes in
Computer Science, pages 565–579. Springer-Verlag.
Arbab, F. (2005). Abstract behavior types: A foundation
model for components and their composition. Science
of Computer Programming, 55(1–3):3–52.
Bacon, D. F., Strom, R. E., and Tarafdar, A. (2000). Guava:
FROM STATIC TO DYNAMIC PROCESS TYPES
27

A dialect of Java without data races. In OOPSLA
2000.
Boyapati, C. and Rinard, M. (2001). A parameterized type
system for race-free Java programs. In OOPSLA 2001.
ACM.
Brinch-Hansen, P. (1975). The programming language
Concurrent Pascal. IEEE Transactions on Software
Engineering, 1(2):199–207.
Caromel, D. (1993). Toward a method of object-oriented
concurrent programming. Communications of the
ACM, 36(9):90–101.
Choi, J.-D., Gupta, M., Serrano, M., Sreedhar, V. C., and
Midkiff, S. (1999). Escape analysis for Java. In OOP-
SLA’99, Denver, Colorado.
Colaco, J.-L., Pantel, M., and Salle, P. (1997). A set-
constraint-based analysis of actors. In Proceedings
FMOODS’97, Canterbury, United Kingdom. Chap-
man & Hall.
de Alfaro, L. and Henzinger, T. A. (2001). Interface au-
tomata. In Proceedings of the Ninth Annual Sympo-
sium on Foundations of Software Engineering (FSE),
pages 109–120. ACM Press.
Flanagan, F. and Abadi, M. (1999). Types for safe locking.
In Proceedings ESOP’99, Amsterdam, The Nether-
lands.
Heuzeroth, D. and Reussner, R. (1999). Meta-protocol and
type system for the dynamic coupling of binary com-
ponents. In OORASE’99: OOSPLA’99 Workshop on
Reflection and Software Engineering, Bicocca, Italy.
Jacobsen, H.-A. and Kr
¨
amer, B. J. (1998). A design
pattern based approach to generating synchroniza-
tion adaptors from annotated IDL. In IEEE Interna-
tional Conference on Automated Software Engineer-
ing (ASE’98), pages 63–72, Honolulu, Hawaii, USA.
Kobayashi, N., Pierce, B., and Turner, D. (1999). Linearity
and the pi-calculus. ACM Transactions on Program-
ming Languages and Systems, 21(5):914–947.
Kobayashi, N. and Yonezawa, A. (1994). Type-theoretic
foundations for concurrent object-oriented program-
ming. ACM SIGPLAN Notices, 29(10):31–45. Pro-
ceedings OOPSLA’94.
Lee, E. A. and Xiong, Y. (2004). A behavioral type system
and its application in Ptolemy II. Formal Aspects of
Computing, 16(3):210–237.
Liskov, B. and Wing, J. M. (1993). Specifications and their
use in defining subtypes. ACM SIGPLAN Notices,
28(10):16–28. Proceedings OOPSLA’93.
Matsuoka, S. and Yonezawa, A. (1993). Analysis of in-
heritance anomaly in object-oriented concurrent pro-
gramming languages. In Agha, G., editor, Research
Directions in Concurrent Object-Oriented Program-
ming. The MIT Press.
Meyer, B. (1993). Systematic concurrent object-
oriented programming. Communications of the ACM,
36(9):56–80.
Meyer, B. (1997). Object-Oriented Software Construction.
Prentice Hall, second edition edition.
Meyer, B. (2003). The grand challenge of trusted com-
ponents. In ICSE-25 (International Conference on
Software Engineering), Portland, Oregon. IEEE Com-
puter Press.
Mezini, M. and Ostermann, K. (2002). Integrating indepen-
dent components with on-demand remodularization.
In OOPSLA 2002 Conference Proceedings, pages 52–
67, Seattle, Washington. ACM.
Milner, R., Parrow, J., and Walker, D. (1992). A calculus
of mobile processes (parts I and II). Information and
Computation, 100:1–77.
Najm, E. and Nimour, A. (1997). A calculus of object
bindings. In Proceedings FMOODS’97, Canterbury,
United Kingdom. Chapman & Hall.
Nielson, F. and Nielson, H. R. (1993). From CML to pro-
cess algebras. In Proceedings CONCUR’93, num-
ber 715 in Lecture Notes in Computer Science, pages
493–508. Springer-Verlag.
Nierstrasz, O. (1993). Regular types for active objects.
ACM SIGPLAN Notices, 28(10):1–15. Proceedings
OOPSLA’93.
Plasil, F. and Visnovsky, S. (2002). Behavioral protocols for
software components. IEEE Transactions on Software
Engineering, 28(11):1056–1076.
Puntigam, F. (1995). Flexible types for a concurrent model.
In Proceedings of the Workshop on Object-Oriented
Programming and Models of Concurrency, Torino.
Puntigam, F. (1997). Coordination requirements expressed
in types for active objects. In Aksit, M. and Matsuoka,
S., editors, Proceedings ECOOP’97, number 1241 in
Lecture Notes in Computer Science, pages 367–388,
Jyv
¨
askyl
¨
a, Finland. Springer-Verlag.
Puntigam, F. (2000). Concurrent Object-Oriented Pro-
gramming with Process Types. Der Andere Verlag,
Osnabr
¨
uck, Germany.
Puntigam, F. (2003). State information in statically checked
interfaces. In Eighth International Workshop on
Component-Oriented Programming, Darmstadt, Ger-
many.
Ravara, A. and Vasconcelos, V. T. (1997). Behavioural
types for a calculus of concurrent objects. In Proceed-
ings Euro-Par’97, number 1300 in Lecture Notes in
Computer Science, pages 554–561. Springer-Verlag.
S
¨
udholt, M. (2005). A model of components with non-
regular protocols. In Software Composition (SC
2005), Edinburgh, Scotland.
Vivien, F. and Rinard, M. (2001). Incrementalized pointer
and escape analysis. In PLDI ’01. ACM.
von Praun, C. and Gross, T. R. (2003). Static conflict anal-
ysis for multi-threaded object-oriented programs. In
PLDI ’03, pages 115–128. ACM Press.
Yellin, D. M. and Strom, R. E. (1997). Protocol specifi-
cations and component adaptors. ACM Transactions
on Programming Languages and Systems, 19(2):292–
333.
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
28
