
AN APPROACH TO MULTI-AGENT VISUAL COMPOSITION
WITH MIXED STYLES
Joaquim Reis
Departamento de Ciências e Tecnologias de Informação, ISCTE, Avenida das Forças Armadas, 1600 Lisboa, Portugal
Keywords: Agents, Creativity, Design, Shape Grammars.
Abstract: Applications of computer systems that mix Art, Science and Engineeering have appeared as a result of the
evolution of information technologies in the last three decades. Frequently, they involve the use of Artificial
Intelligence techniques and they have appeared in the fields of music, literary arts and, more recently, visual
arts. This article proposes a computational system based on creative intelligent agents that, by making use of
the shape grammar formalism, can support visual composition synthesis activities. In this system, each
agent gives its creative contribution through a style of its own. Different modes of agent contribution can be
put into perspective like, for instance, cooperative or non-cooperative modes, the resulting composition
emerging from these contributions.
1 INTRODUCTION
We can say that the degree of evolution of the
human species can be measured by the degree of
sophistication of the technology it uses, as well as by
the degree of social organisation. There has always
been a relationship among technology evolution,
human evolution and human societies evolution. The
importance of information technologies has been
increasing progressively. Presently they impact in
every area of society, not only in engineering or
management, just to cite the most evident cases, but,
and more recently, in art too.
Of course that any form of art involves always
som
e kind of technology. To produce his work, the
painter uses tools like brushes, dyes, canvas, for
instance, as well as certain techniques to work with
these tools. But, in this era of information and
computers, the mix of techonology and art is
becoming more and more common, not just at the
level of execution, but also at the level the creative
process. The contribution of Artificial Intelligence,
an area of computer science born in the 1950s (
Rich
1991, Russell 2003), has been significant for this.
This article makes a very brief revision of the
ap
plication of computer systems to the artistic
creative field, next centers around the visual arts,
then introduces the theme of shape grammars, and
finally it proposes a system based on creative agents
to support the visual composition activity.
2 ART, COMPUTERS AND
ARTIFICIAL INTELLIGENCE
There has been, in the last three decades, an
increasing use of information technologies in the
musical arts. Due to the digital technology of
computers it is nowadays possible to store, analyse,
modify and synthesize with an accuracy higher than
that of the human ear system, and even generate
musical compositions. It was in the musical arts that
information technologies have penetrated more
rapidly, perhaps due to the facts that music is of a
more quantitative nature, was more theoretically
mature and the needs of memory and processing
capacity aren’t excessive (at least when compared to
those of visual arts). With the progression of
Artificial Intelligence and the appearance of the
knowledge based systems, in particular expert
systems, new methods of musical composition have
appeared. The process of composition now involves
an interaction between the composer and the
computer system in which the composer generates,
and concentrates on, the original ideas for a
composition, and has support from the computer
system that was programmed with knowledge about
the composition process (
Kurzweil 1990, Miranda
2001).
In the literary arts comp
uters are presently very
useful. For instance, text processors are
indispensable software nowadays and together with
them, there are also a set of software tools like
357
Reis J. (2006).
AN APPROACH TO MULTI-AGENT VISUAL COMPOSITION WITH MIXED STYLES.
In Proceedings of the First International Conference on Software and Data Technologies, pages 357-362
DOI: 10.5220/0001310603570362
Copyright
c
SciTePress

spelling correctors, grammar correctors, style
correctors, and dictionaries, thesaurus and other
kinds of linguistic data bases. In particular, in the
field of natural language processing, Artificial
Intelligence has had an important role (
Winograd
1983
, Allen 1987), in understanding (analysis) as well
as in generation (synthesis). Automatic translation,
data base interfaces in natural language and other
kinds of systems involving dialogue, story
understanding and generation and poetry generation,
are some examples of the rich contribution of
Artifical Intelligence.
In the visual arts, due to a slower evolution of
hardware, in particular respecting to graphic
capabilities (limited graphic resolution of output
devices), only more recently (when compared to the
musical and literary arts) the use of information
technologies has become more attractive. From the
decade of 1990 on we could watch a progression in
the investigation, with its products migrating
progressivelly to software tools to support the
creative activity of designers, architects and
graphical artists in general. The computer supported
visual arts methods of creation vary from free hand
drawing by using the computer screen as it were
paper or canvas, to the most complex image
processing involving the generation of shadows,
surfaces, shapes, colors, and the execution of
translation, rotation, scaling repetition and distortion
operations on shapes. Mixing with the cognitive
aspects, in the field of the creative process,
mathematical processes and Artificial Intelligence
techniques like fractals, chaos theory, genetic
algorithms, rule based systems and artificial life
(
Kurzweil 1990), the latter related to the idea of
agents of Distributed Artificial Intelligence (
Ferber
1999
), have been used. Some of these techniques,
namely artificial life, have migrated to the animation
and cinema field. As examples of the application of
these methods to the visual arts we can point the
works of the painter Harold Cohen, with his
AARON program (
Cohen 1999), and of Leonel
Moura with his system of painter robots, that were
both participants in an recent art exposition in
Lisbon (
Bioart 2005).
3 THE GRAMMARS OF SHAPE
Shape grammars were introduced in the 1970s by
Stiny and Gips (
Stiny 1972). They are similar in
principles to the grammars used in the area of
Artificial Intelligence in natural language
understanding and generation (
Allen 1987), with the
difference of being based not on symbols, but on
shapes (points, lines, two-dimensional and
three-dimensional geometric shapes) as well as, by
extension, also other parameters like dimensions,
colors, etc..
A shape grammar is composed by a basic
vocabulary of shapes, an initial shape and a finite set
of rules that specify how shapes can be generated
from other preexistent shapes, similarly to the
lexicon, the initial symbol and the grammar rules of
a language used in a natural language processing
system. The rules of a shape grammar specify how,
in a composition in progress, shape existing in the
composition can be replaced by new shapes.
Each rule has a left side, pre-condition, or
antecedent, and a right side, action, or consequent.
The left side specifies the pattern for which the rule
is applicable and the right side the respective pattern
for substitution. Briefly, a rule is applicable if there
is a similarity transformation (i.e., an isometry or a
transformation of scale) leading to a match of the
shape of the left side of the rule with a shape
existing in the composition. Rules are applied in a
forward manner (from antecedent to consequent),
like in the production/rule-based forward-chaining
systems of Artificial Intelligence, which perform a
kind of forward inference. When applied, a rule
replaces the shape(s) matched in the composition
with the shapes in its right side. Symbolically, we
can express a rule in the following schematic form:
<shape(s)-to-match> =>
<shape(s)-for-substitution>
Special markers (labels) that aren’t part of the
composition can be used for rule application control
and application termination condition specification.
=>
-> ->
...
a) rule b) resulting composition
Figure 1: Shape grammar example.
For instance, in Figure 1 we show a shape
grammar with only one rule, as well an example of a
possible result from the repeated rule application.
Even a simple shape grammar like this can show
some emergence behavior. This feature depends on
the degree of detail and hierarchy accomodated by
the internal computational representation used for
the geometric shapes in the system (which
influences the ability to consider and process certain
shapes as non-atomic ones, and to recognise shapes
in the composition that weren’t explicitly included in
it).
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
358
=>
-> ->
...
a) rule b) resulting composition
Figure 2: Shape grammar example.
For instance, in Figure 2, we show possible
results with the same shape grammar of
Figure 1 with
a system able to recognise emergent shapes.
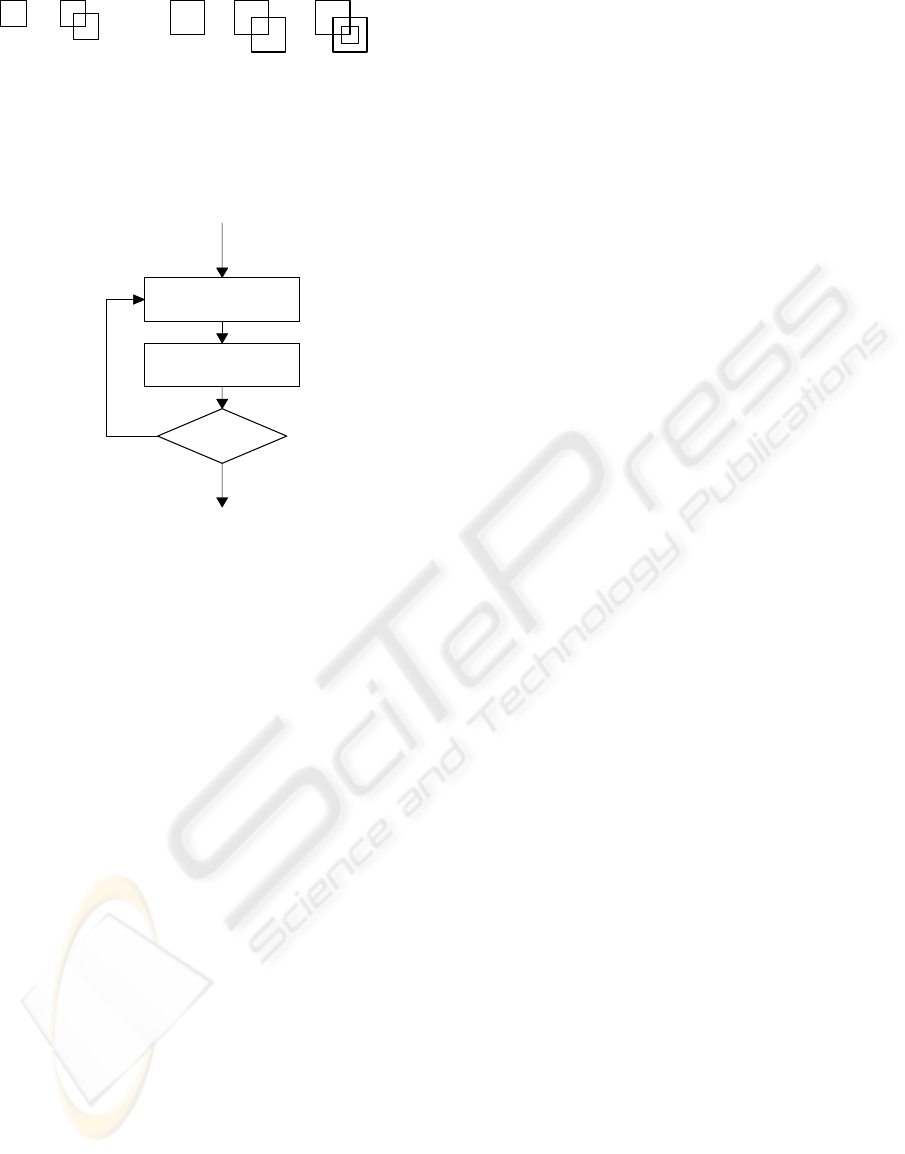
evaluate candidate
solutions
generate candidate
solutions
yes
no
goals
accomplished?
Figure 3: Solution generation for a design problem.
Shape grammars with various rules allow for a
greater diversity of alternative compositions. The
process of finding a solution for a design problem
can be seen as a search process which generates
candidate solutions for the problem. This process
takes place in the search space of alternative
possible compositions resulting from the application
of the rules of the shape grammar (
Mitchell 1998). In
its most basic form, this is an iterative
generate-and-test search process that, in each
iteration, produces a possible solution and evaluates
it, testing if the goals of the design problem were
attained. In
Figure 3 we represent the basic structure
of this process.
A system for the execution of this search process
must have a generation component (which is the
shape grammar), a test component (which filters the
acceptable solutions) and, additionally, a control
strategy (rules for determining which way the
system will follow next). This control strategy can
be more than a simple depth-first or breadth-first
search and include heuristics to make the search
process an informed one, causing the system to give
priority to the best alternatives. Such a system could
include specific design knowledge in any of those
three components. In terms of interaction with the
user, different configurations are possible: in one
extreme all functionalities are carried on by a user,
in the other extreme all the process would be
automatic.
The use of shape grammars has been exploited in
applications in different design problems, in the
context of syntesis (generation) and analysis
(interpretation) of visual compositions and also as
means to the description and the representation of
styles, including for didactic purposes and also other
specific applications, for instance in architectural
drawings (
Gips 1999, Tapia 1999, Knight 2000,
Mitchell 1998).
A style is a way of someone doing something
(
Simon 1971) and shows up when that someone
chooses an alternative or a process for generating a
solution. In the field of design, a style is a king of
design knowledge which is a characteristic of a
product, or a set of products, of design, and is
recognisable through the presence of some visual
elements like shape, color, relative position, texture,
dimension, orientation (
Dondis 1973, Bonsiepe
1983
, Wong 1993), as well as certain ways of
combining those elements. Visual compositions can
be generated automatically according to specific
styles. Each style is implemented by the set of rules
of the shape grammar specific to the style.
4 AGENTS, STYLES AND
AGENTS WITH STYLE
The Intelligent Agents technology has been applied
to complex problems involving intelligence and
interaction among agents, human included, namely
in the field of the Internet and in animation in
cinema. It is an intelligent systems technology from
the area of Artificial Intelligence that proposes a
problem solving approach where the problem
solving effort is distributed to a group of intelligent
agents (
Weiss 1999, Ferber 1999). In this context, an
agent is defined as an entity situated in an
environment, that perceives the environment, and
acts in the environment. Not rarely, an agent based
system is composed by a certain number of agents,
i.e., it is a multi-agent system, each with a certain
level of intelligence and a certain level of
communication capabilities. In terms of problem
solving, the idea behind a multi-agent system is to
approach the solution of problems that an isolated
agent wouldn’t be able to solve.
Respecting to the complexity of the internal
architecture, we can classify agents in cognitve and
reactive agents. Cognitive agents tipically have an
architecture containing internal representation
mechanism that allow them to maintain an
up-to-date model of their environment and of
themselves, to reason about the environment and
AN APPROACH TO MULTI-AGENT VISUAL COMPOSITION WITH MIXED STYLES
359
about the results of its own actions in the
environment. This kind of agents is the most
sophisticated, autonomous and intelligent, and they
have capabilities to maintain goals and plan their
actions in order to be able to attain those goals. In
general, multi-agent systems with cognitive agents
are composed by a small number of agents and the
activity in the system comes more from the
cognitive activity of the agents than from the
interaction amongst them. Communication can be
very sophisticated and is usually based on message
passing, and may inlcude standardised protocols.
Agent activity coordination mechanisms can vary
and can go from a total cooperation among agents to
antagonistic forms involving competition and
negotiation.
Reactive agents have a very simple architecture.
They don’t have any internal representation and
reasoning mechanisms (and thus, they can’t have
goals, and they aren’t able to plan their actions) and
its behavior is based on stimulus-response patterns.
In general, multi-agent systems based on reactive
agents are composed by a great number of agents
and the activity of the system stems more from the
interaction amongst them. Communication is very
primitive, and is carried through signal exchange or
by operating and recognising changes in the
environment.
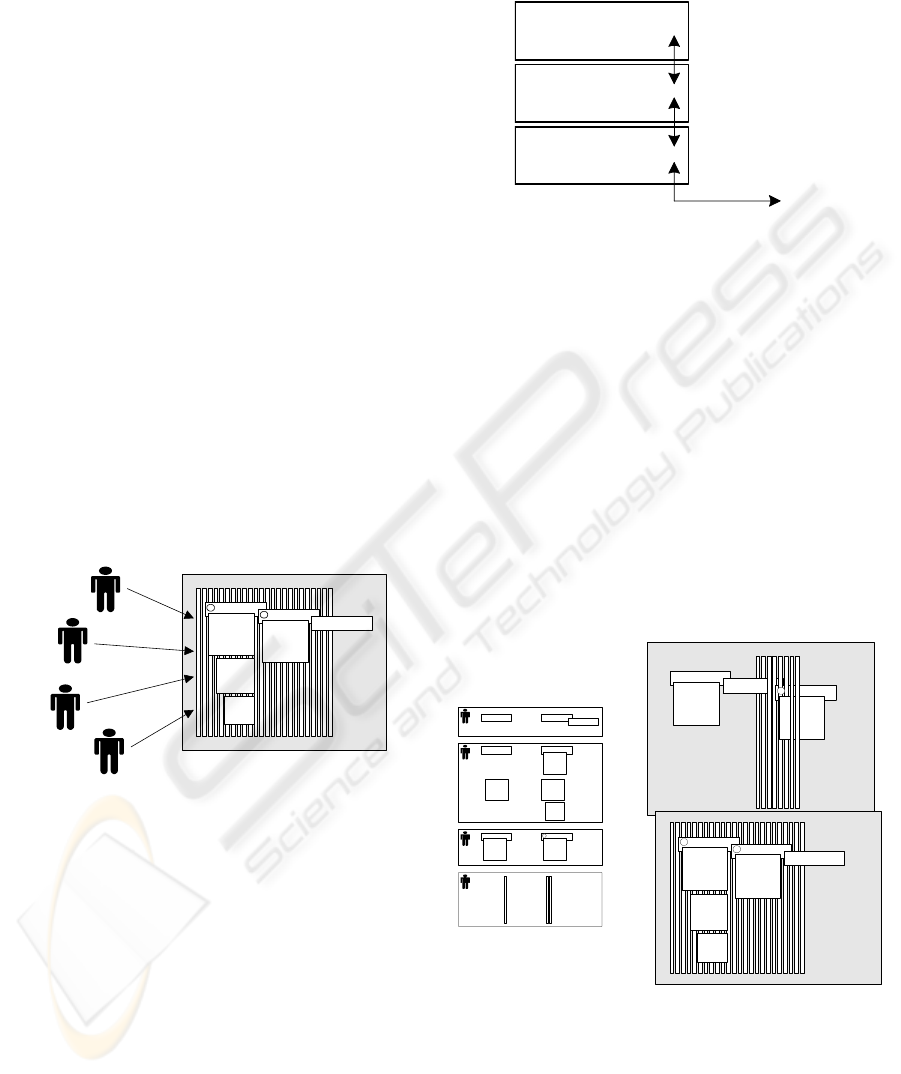
agents
composition
Figure 4: A system for multi-agent generation of visual
composition.
The system we propose in this article is a
multi-agent system based on creative Intelligent
Agents in which shape grammars are used to support
an activity of visual composition. In this system,
sketched in
Figure 4, each agent (see Figure 5) gives
its own creative contribution through a style of its
own. A style is represented by a set of rules
implementing the shape grammar for the style. Each
agent has the set of rules of its own style, and tries to
apply them, depending of the present state of the
composition. Given a set of these agents, each one
with its own style, and given a set of shapes
recognisable in the context of those styles each agent
will apply the rules of its style, whenever possible,
together progressivelly generating a visual
composition, or a set of alternative visual
compositions.
(composition)
inference engine
(forward-chaining)
rule memory
working memory
an agent
Figure 5: Architecture of an agent of the system depicted
in the previous figure (simplified).
As the agents of this system are rule-based they
are, essentially, reactive. However, the rules contain
knowledge, i.e., problem domain knowledge (styles
of visual composition) so, in a certain perspective,
the agents can be considered cognitive. The
interaction among the agents occurs through changes
in their environment, which means the visual
composition in progress. Control of the agent
activity can involve human external intervention.
Several forms of agent activity coordination can be
put in perspective, some involving more cooperative
agent contributions others more competitive in
nature. The resulting composition will emerge from
these contributions.
=>
=>
=>
=>
=>
a) agents and grammars b) alternative compositions
Figure 6: Shape grammar example.
For example, in Figure 6, we represent a set of
agents with simple shape grammars and two possible
visual composition results, one of them is the result
of a less cooperative process (the result of the style
application shows an apparent disorder), and the
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
360
other of a more cooperative one (in this case the
result of the style application shows more order).
Possible applications for this kind of system are
visual composition generation with mixed styles,
free generation or controlled and goal oriented
generation (e.g., technical drawing, Web page layout
design).
5 WORK IN PROGRESS AND
FUTURE WORK
The system we have described is still being
conceptualised but there is already some work in
progress leading to its realisation. This work in
progress includes an embryo of an ontology of a
geometric two-dimensional domain, including
geometric points and relative position relations
between geometric points on the x and on the y
direction, line segments and relative position
relations between line segments on the x and on the
y direction, and rectangular shapes and relative
position relations between rectangular shapes on the
x and on the y directions in the plane. In the
following we very briefly show some aspects of this
ontology.
y
y
2
y
1
y
1
<y
2
x
x
2
x
1
x
1
<x
2
a) horizontally b) verticallly
Figure 7: Relative position relations between two
geometric points on the same line.
Starting from the relative position relations
between two geometric points on the same line
shown in
Figure 7, we have built the 13 basic
relations between two line segments horizontally (x
axis) and vertically (y axis). For reasons of space
economy we only show, in
Figure 8, the relations for
the first case (x axis); for the other case there is an
equal number of similar relations but in the vertical
direction (y axis). These relative position relations
on an axis are inspired by the temporal interval
relations of (
Allen 1983).
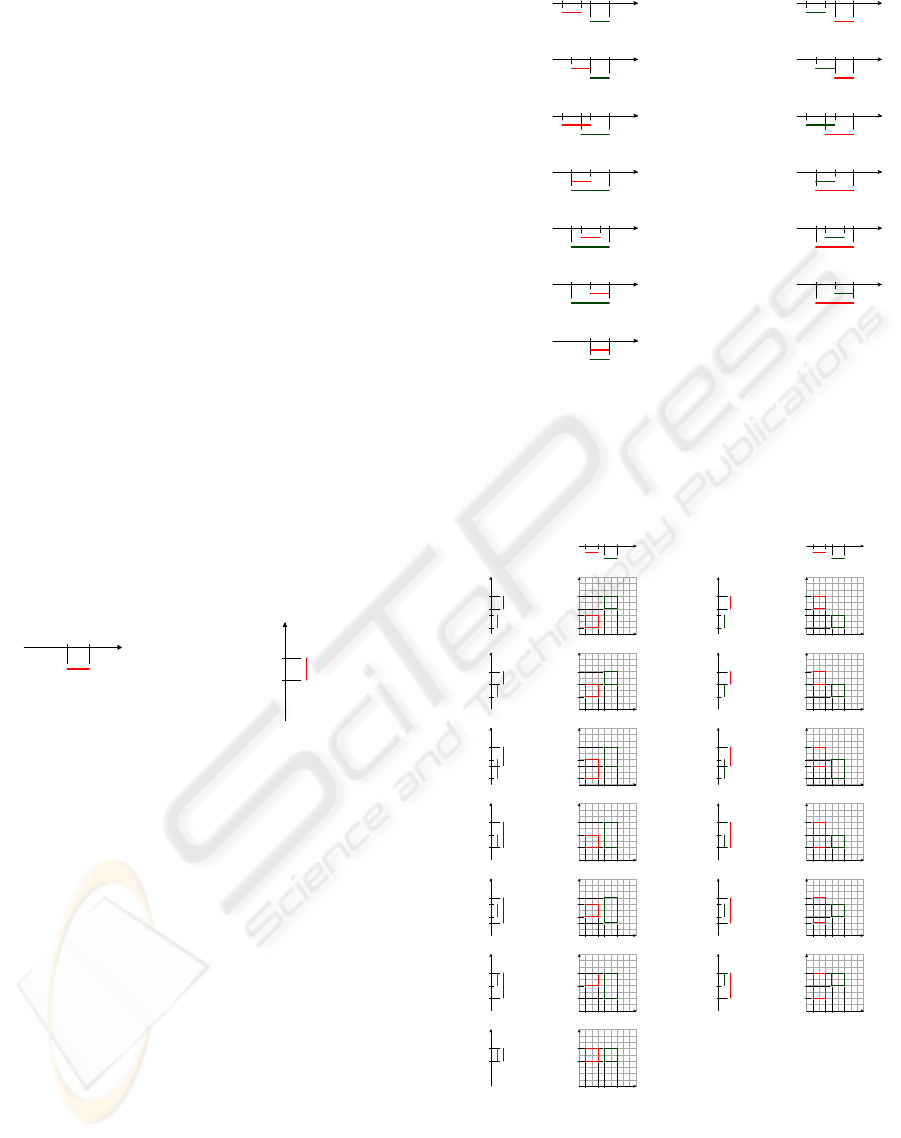
Combining these relations pairwise we can get
the relative position relations between rectangular
shapes in the two-dimensional plane, in number 169
(13x13).
x-before(a,b)
x
xa
1
xa
2
xb
1
xb
2
a
b
x-meets(a,b)
x
xa
1
xb
2
xb
1
xa
2
a
b
x-overlaps(a,b)
x
xa
1
xb
2
xb
1
xa
2
a
b
x-starts(a,b)
x
xa
2
xb
2
xa
1
xb
1
a
b
x-inside(a,b)
x
xb
1
xa
1
xa
2
xb
2
b
x-ends(a,b)
a
x
xa
1
xb
1
xa
2
xb
2
a
b
x-equals(a,b)
x-equals(b,a)
x
xa
1
xb
1
xa
2
xb
2
a
b
x
xb
1
xb
2
xa
1
xa
2
b
x-after(a,b)
a
x
xb
1
xa
2
xa
1
xb
2
b
x-met-by(a,b)
a
x
xb
1
xa
2
xa
1
xb
2
b
x-overlapped-by(a,b)
a
x
xb
2
xa
2
xb
1
xa
1
b
x-started-by(a,b)
a
x
xa
1
xb
1
xb
2
xa
2
b
x-contains(a,b)
a
x
xb
1
xa
1
xb
2
xa
2
b
x-ended-by(a,b)
a
a) direct relation b) inverse relation
Figure 8: Relative position relations between two line
segments horizontally (in the x axis).
For reasons of space economy we only show, in
Figure 9, 13 of those relations.
x
xa
1
xa
2
xb
1
xb
2
a
b
x-before(a,b)
x-after(b,a)
x
xa
1
xa
2
xb
1
xb
2
b
x-before(a,b)
x-after(b,a)
a
x
y
b
a
ya
1
ya
2
xa
2
xa
1
xb
1
xb
2
yb
2
yb
1
x
y
ya
1
xb
1
xb
2
yb
2
yb
1
ya
2
xa
1
xa
2
b
a
x
y
ya
1
ya
2
xa
2
xa
1
yb
2
yb
1
xb
1
xb
2
b
a
x
y
ya
2
yb
2
ya
1
yb
1
xa
1
xa
2
xb
1
xb
2
b
a
x
y
ba
ya
1
ya
2
yb
2
yb
1
xa
1
xa
2
xb
1
xb
2
x
y
b
a
ya
1
yb
1
xa
1
xa
2
xb
1
xb
2
ya
2
yb
2
x
y
b
xb
1
xb
2
xa
2
xa
1
ya
1
yb
1
ya
2
yb
2
a
x
y
b
a
yb
1
yb
2
xa
2
xa
1
xb
1
xb
2
ya
2
ya
1
x
y
yb
1
xb
1
xb
2
ya
2
ya
1
yb
2
xa
1
xa
2
b
a
x
y
yb
1
yb
2
xa
2
xa
1
ya
2
ya
1
xb
1
xb
2
b
a
x
y
yb
2
ya
2
yb
1
ya
1
xa
1
xa
2
xb
1
xb
2
b
a
x
y
b
yb
1
yb
2
ya
2
ya
1
xa
1
xa
2
xb
1
xb
2
a
x
y
b
yb
1
ya
1
xa
1
xa
2
xb
1
xb
2
yb
2
ya
2
a
y-before(a,b)
y-meets(a,b)
y-overlaps(a,b)
y-starts(a,b)
y-inside(a,b)
y-ends(a,b)
y-equals(a,b)
y-equals(b,a)
y
yb
2
yb
1
ya
2
ya
1
b
a
y
yb
2
ya
1
yb
1
ya
2
a
b
y
yb
2
ya
1
ya
2
yb
1
a
b
y
yb
2
ya
2
ya
1
yb
1
a b
y
yb
2
ya
1
yb
1
ya
2
a
b
y
ya
1
ya
2
yb
2
yb
1
a
b
y
ya
1
yb
1
ya
2
yb
2
a b
y-after(a,b)
y-met-by(a,b)
y-overlapped-by(a,b)
y-started-by(a,b)
y-contains(a,b)
y-ended-by(a,b)
y
ya
2
ya
1
yb
2
yb
1
b
a
y
ya
2
yb
1
ya
1
yb
2
b
a
y
ya
2
yb
1
yb
2
ya
1
b
a
y
ya
2
yb
2
yb
1
ya
1
b a
y
ya
2
yb
1
ya
1
yb
2
b
a
y
yb
1
yb
2
ya
2
ya
1
b
a
a) direct relation b) inverse relation
Figure 9:
Relative position relations between two
rectangular shapes in the two-dimensional plane.
A different aspect in the work in progress is a
small prototype program, being developed in
AN APPROACH TO MULTI-AGENT VISUAL COMPOSITION WITH MIXED STYLES
361

Common Lisp, to implement the forward-chaining
inference engine for experimenting with the set of
rules the shape grammar of an agent. We also intend
to look for software tools that allow suitable domain
knowledge representation and reasoning, preferably
implemented in, and with good integration with the
symbolic environment of, Common Lisp. Possible
candidates are the rule and logic based tools LOOM
(
LOOM 2005) and LISA (LISA 2005), for instance.
In the near future, more immediate work to be
developed has to do with computational geometry
(e.g., geometric shape manipulation, including
similarity transformations, particularly for
recognizing shape patterns in the left side of shape
grammar rules). But the most significant aspects to
give special attention to are the control mechanisms
for rule application, which can be viewed in the
intra-agent and in the inter-agent perspectives, the
latter involving the coordination of the activity of
the agents in the multi-agent system.
REFERENCES
Allen 1987. Allen, James, Natural Language
Understanding, The Benjamin/Cummings Publishing
Company, Inc., 1987.
Allen 1983. Allen, James F., Maintaining Knowledge
about Temporal Intervals, Communications of the
ACM 26 (11), 1983, 832-843.
Bioart 2005. Bioart (Bioarte) 2005 - Lisboa, Galeria
António Prates, Lisboa, Portugal, 2005 (exhibition
catalog, ISBN: 972-8639-03-1).
Bonsiepe 1983. Bonsiepe, Gui, Teoria e Pratica del
Disegno Industriale, Elementi per una Manualistica
Critica, Giangiacomo Feltrinelli Editore, Milano,
1983.
Cohen 1999. Cohen, Harold, http://crca.ucsd.
edu/%7Ehcohen/.
Dondis 1973. Dondis, Donis A., A Primer of Visual
Literacy, The Massachusetts Institute of Technology,
1973.
Ferber 1999. Ferber, Jacques, Multi-Agent Systems, An
Introduction to Distributed Artificial Intelligence,
Addison-Wesley, 1999.
Gips 1999. Gips, James, Computer Implementation of
Shape Grammars, Workshop on Shape Computation,
MIT, 1999 (
http://www.shapegrammar.org/
implement.pdf).
Knight 2000. Knight, Terry, Shape Grammars in
Education and Practice: History and Prospects,
Department of Architecture, MIT, 2000
(
http://www.mit.edu/~tknight/IJDC/).
Kurzweil 1990. Kurzweil, Raymond, The Age of
Intelligent Machines, Chapter Nine: The Science of
Art (http://www.kurzweilai.net/meme/frame.html?
main=/ articles/art0307.html).
LISA 2005. http://lisa.sourceforge.net/.
LOOM 2005. http://www.isi.edu/isd/LOOM/.
Miranda 2001. Miranda, Eduardo Reck, Composing Music
with Computers, Music TECHNOLOGY Series, Focal
Press, Series Ed. Francis Rumsey, 2001.
Mitchell 1998. Mitchell, William J., The Logic of
Architecture, The Massachusetts Institute of
Technology, 1998.
Rich 1991. Rich, Elaine; Knight, Kevin, Artificial
Intelligence, McGraw-Hill, 1991.
Russell 2003. Russell, Stuart; Norvig, Peter, Artificial
Intelligence, A Modern Approach, Prentice Hall, 2003.
Simon 1971. Simon, H.A., Style in Design, Proceedings of
the Second Annual Environmental Design Research
Association Conference, 1971, 1-10.
Stiny 1972. Stiny, G. and Gips, J., Shape Grammars and
the Generative Specification of Painting and
Sculpture, in C. V. Freiman, ed., Information
Processing 71 (North Holland, Amsterdam, 1972), pp.
1460-1465.
Tapia 1999. Tapia, M., A Visual Implementation of a
Shape Grammar System, Environment and Planning
B: Planning and Design, 1999, vol.26, pp.59-73.
Weiss 1999. Weiss, Gerhard (ed.), Multiagent Systems, A
Modern Approach to Distributed Artificial
Intelligence, The MIT Press, 1999.
Winograd 1983. Winograd, Terry, Language as a
Cognitive Process, Syntax, Addison-Wesley
Publishing Company, Inc., 1983.
Wong 1993. Wong, Wucius, Principles of Form and
Design, John Wiley & Sons, Inc., 1993.
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
362
