
ON THE EVALUATION OF TREE PATTERN QUERIES
Yangjun Chen
Department of Applied Computer Science, University of Winnipeg
Winnipeg, Manitoba, Canada R3B 2E9
Keywords: XML document, Tree pattern queries, Tree embedding, Constraint satisfaction problem, NP-complete.
Abstract: The evaluation of Xpath expressions can be handled as a tree emb
edding problem. In this paper, we propose
two strategies on this issue. One is ordered-tree embedding based and the other is unordered-tree embedding
based. For the ordered-tree embedding, our algorithm needs only O(|T|⋅|P|) time and O(|T|⋅|P|) space, where
|T| and |P| stands for the numbers of the nodes in the target tree T and the pattern tree P, respectively. For the
unordered-tree embedding, we give an algorithm that needs O(|T|⋅|P|⋅2
2k
) time, where k is the largest out-
degree of any node in P.
1 INTRODUCTION
In XML (World Wide Web Consortium, 1998)
(World Wide Web Consortium, 1998b), data is
represented as a tree; associated with each node of
the tree is an element type from a finite alphabet ∑.
The children of a node are ordered from left to right,
and represent the content (i.e., list of subelements) of
that element. XML queries such as XPath (w3.org,
http), XQuery (Robie et al., 1998), XML-QL
(Deutsch et al., 1989) (Florescu et al., 1999) and
Quilt (Chamberlinet al., 2000) use tree patterns to
extract relevant portions from the input database. A
tree pattern query (or called a query tree) that we
consider in this paper, denoted by TPQ from now
on, is defined as follows. The nodes of a tree are
labeled by element types from ∑ ∪ {*}, where * is a
wild card, matching any element type. The type for a
node v is denoted τ(v). There are two kinds of edges:
child edges (c-edges) and descendant edges (d-
edges). A c-edges from node v to node u is denoted
by v → u in the text, and represented by a single arc;
u is called a c-child of v. A d-edge is denoted v ⇒ u
in the text, and represented by a double arc; u is
called a d-child of v.
In any DAG (directed acycli
c graph), a node u is
said to be a descendant of a node v if there exists a
path (sequence of edges) from v to u. In the case of a
TPQ, this path could consist of any sequence of c-
edges and/or d-edges.
An embedding of a TPQ P in
to an XML document T
is a mapping f: P → T, from the nodes of P to the
nodes of T, which satisfies the following conditions
(Ramanan 2002):
1. Preserve node type: For each v ∈ P, v and f(v)
are
of the same type.
2. Preserve c/d-ch
ild relationships: If v → u in P,
then f(u) is a child of f(v) in T; if v ⇒ u in P,
then f(u) is a descendant of f(v) in T.
Any document T, in which P can be embedded, is
said to contain P and considered to be an answer.
To handle all the possible XPath queries, we allow a
no
de u in a TPQ P to be associated with a set of
predicates. We distinguish among three different
kinds of predicates: current node related predicates
(called current-predicates), child node related
predicates (called c-predicates), and descendant
related predicates (called d-predicates). A current-
predicate p is just a built-in predicate applied to the
current node; i.e., a node v in T, which matches u,
must satisfy this predicate associated with u. A c-
predicate is a built-in predicate applied to the
children of the current node. That is, for each node v
in T, which matches u, each of its children (or one of
its children) must satisfy this predicate. Similarly, a
d-predicate must be satisfied by all the descendants
of the node (or one of its descendants), which
matches u. Without loss of generality, we assume
that associated with u is a conjunctive-disjunctive
normal form: (p
11
∨ ... ∨ ) ∧ ... ∧ (p
11i
p
k1
∨ ...
∨ ), where each p
kki
p
ij
is a predicate.
For example, the following XPath query:
chapter[section[//paragraph[text() contains
‘informatics’]/following-sibling::*][position() =
3]]/*[self::section or self::chapter-notes]
can be represented by a tree shown in Fig. 1.
In the query tree shown in Fig. 1, each node is
l
abeled with a type or *, and may or may not be
79
Chen Y. (2006).
ON THE EVALUATION OF TREE PATTERN QUERIES.
In Proceedings of the First International Conference on Software and Data Technologies, pages 79-85
DOI: 10.5220/0001308700790085
Copyright
c
SciTePress
associated with a conjunctive-disjunctive normal
form of predicates, which are used to describe the
conditions that the node (and/or its children) has to
satisfy, or the relationships of the node with some
other nodes:
Figure 1: A sample TPQ.
u
0
- τ(u
0
) = chapter. It matches any node v in T if it is
associated with type ‘chapter’.
u
1
- τ(u
1
) = section; and associated with a current
predicate position() = 3. It matches any node v in T
if it is a third child of its parent and associated with
type ‘section’.
u
2
- τ(u
2
) = *; and associated with a disjunction of
current-predicates: τ(u
2
) = section or τ(u
2
) = chapter-
notes. It matches a node v in T if it is associated with
type ‘section’ or ‘chapter-notes’.
u
3
- τ(u
3
) = paragraph; associated with a c-predicate:
text() contains ‘informatics’. It matches a node v in
T if it is associated with type ‘paragraph’ and has a
text child that contains word ‘informatics’.
u
4
- τ(u
4
) = *; associated with a current-predicate:
following-sibling(v
3
), which indicates that if u
4
match a node in T, that node must directly follows
any node that matches u
3
, i.e., any node with type
‘paragraph’ and having a text child node that
contains word ‘informatics’.
Accordingly, the embedding f of a TPQ P into a
document T is modified as follows.
1. For each v ∈ P, v and f(v) are of the same type;
and f(v) satisfies all the current-predicates
associated with v.
2. If v → u in P, then f(u) is a child of f(v) in T;
and f(u) satisfies all the c-predicates associated
with v. If v ⇒ u in P, then f(u) is a descendant of
f(v) in T; and f(u) satisfies all the d-predicates
associated with v.
In this paper, we mainly discuss how such a tree
embedding can be efficiently checked.
The rest of the paper is organized as follows. In
Section 2, we review some related work. In Section
3, we discuss a new strategy for evaluating XPath
queries by handling them as ordered tree embedding
problems. In Section 4, another strategy is proposed
based on unordered tree embedding. Finally, a short
conclusion is set forth in Section 5.
2 RELATED WORK
Recently, much research has been conducted on the
evaluation of such XML queries (Gottlob et al.,
2005) (Gottlob et al., 2005) (Wang et al., 2003)
(Wang et al., 2005) (Zhang et al., 2001). Here, we
just mention some of them, which are very closely
related to the work to be discussed. The first one is
based on Inversion on elements and words (Zhang et
al., 2001), which needs O(n
m
) time in the worst case
where n and m are the number of the nodes in T and
P, respectively. The second is based on Inversion on
paths and words (w3.org, http), which improves the
first one by introducing indexes on paths. The time
complexity of this method is still exponential and
needs O((n⋅h)
k
) time in the worst case, where h is the
average height of a document tree and k is the
number of joins conducted. The main idea of the
third method is to transform a tree embedding into a
string matching problem (Knuth, 1969) (Ramanan
2002). The time complexity is O(n⋅m⋅h). This
polynomial time complexity is achieved by
imposing an ordering on the siblings in a query tree.
That is, the method assumes that the order of
siblings is significant. If the query tree is ordered
differently from the documents, a tree embedding
may not be found even though it exists. In this case,
the query tree should be reordered and evaluated
once again. Another problem of (Wang et al., 2003)
is that the results may be incorrect. That is, a
document tree that does not contain the query tree
may be designated as one of the answers due the
ambiguity caused by identical sibling nodes. This
problem is removed by the so-called forward prefix
checking discussed in (Wang et al., 2005). Doing so,
however, the theoretical time complexity is
dramatically degraded to O(n
2
⋅m⋅h). The last one is
to represent an XPath query as a parse tree and
evaluate such a parse tree bottom-up or top-down
(Gottlob et al., 2005). In (Gottlob et al., 2005), it is
claimed that the bottom-up strategy needs only
O(n
5
⋅m
2
) time and O(n
4
⋅m
2
) space, so does its top-
down algorithm. But in another paper (Gottlob et al.,
2005) of the same authors, the same problem is
claimed to be NP-complete. It seems to be
controversial. In fact, the analysis made in (Gottlob
et al., 2005) assumes that the query tree is ordered
while by the analysis conducted in (Gottlob et al.,
2005) the query tree is considered to be unordered,
leading to different analysis results.
τ(u
3
) = section or
τ(u
3
) = chapter-notes
*
*
paragraph
text() contains
‘informatics’
chapte
r
section
position() = 3
u
3
u
1
u
0
u
2
u
4
following-sibling(u
3
)
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
80

In this paper, we first present an algorithm based on
the ordered tree embedding. Its time complexity is
bounded by O(n⋅m). Then, another strategy based on
the unordered tree embedding is discussed, which
needs O n⋅m⋅2
2k
) time time, where k is the largest
out-degree of any node in P.
3 A STRATEGY BASED ON
ORDERED-TREE EMBEDDING
In this section, we mainly discuss a strategy for the
query evaluation based on ordered-tree embedding,
by which the order between siblings is significant.
The query evaluation based on unordered-tree
embedding is discussed in the next section.
In general, a tree pattern query P can be considered
as a labeled tree if we extend the meaning of label
matching by including the predicate checking. That
is, to check whether a node v in a document T
matches a node u in P, we not only compare their
types, but also check whether all the predicates
associated with u can be satisfied. Such an
abstraction enables us to focus on the hard part of
the problem.
In the following, we first give the basic definitions over
ordered- tree embedding in 2.1. Then, we propose an
algorithm for solving this problem in 2.2.
3.1 Basic Concepts
Technically, it is convenient to consider a slight
generalization of trees, namely forests. A forest is a
finite ordered sequence of disjoint finite trees. A tree
T consists of a specially designated node root(T)
called the root of the tree, and a forest <T
1
, ..., T
k
>,
where k ≥ 0. The trees T
1
, ..., T
k
are the subtrees of
the root of T or the immediate subtrees of tree T, and
k is the out-degree of the root of T. A tree with the
root t and the subtrees T
1
, ..., T
k
is denoted by <t; T
1
,
..., T
k
>. The roots of the trees T
1
, ..., T
k
are the
children of t and siblings of each other. Also, we call
T
1
, ..., T
k
the sibling trees of each other. In addition,
T
1
, ..., T
i-1
are called the left sibling trees of T
i
, and
T
i-1
the direct left sibling tree of T
i
. The root is an
ancestor of all the nodes in its subtrees, and the
nodes in the subtrees are descendants of the root.
The set of descendants of a node v (excluding v) is
denoted by desc(v). A leaf is a node with an empty
set of descendants. The children of a node v is
denoted by chidren(v).
Sometimes we treat a tree T as the forest <T>. We
also denote the set of nodes in a forest F by V(F).
For example, if we speak of functions from a forest
F to a forest G, we mean functions mapping V(F)
onto V(G). The size of a forest F, denoted by |F|, is
the number of the nodes in F. The restriction of a
forest F to a node v with its descendants is called a
subtree of F rooted at v, denoted by F[v].
Let F = <T
1
, ..., T
k
> be a forest. The preorder of a
forest F is the order of the nodes visited during a
preorder traversal. A preorder traversal of a forest
<T
1
, ..., T
k
> is as follows. Traverse the trees T
1
, ..., T
k
in ascending order of the indices in preorder. To
traverse a tree in preorder, first visit the root and
then traverse the forest of its subtrees in preorder.
The postorder is defined similarly, except that in a
postorder traversal the root is visited after traversing
the forest of its subtrees in postorder. We denote the
preorder and postorder numbers of a node v by
pre(v) and post(v), respectively.
Using preorder and postorder numbers, the
ancestorship can be checked as follows.
Lemma 1. Let v and u be nodes in a forest F. Then,
v is an ancestor of u if and only if pre(v) < pre(u)
and post(u) < post(v).
Proof. See Exercise 2.3.2-2 in (Knuth, 1969).
Similarly, we check the left-to-right ordering as
follows.
Lemma 2. Let v and u be nodes in a forest F. Then,
v appears on the left side of u if and only if pre(v) <
pre(u) and post(v) < post(u).
Proof. The proof is trivial.
Now we give the definition of ordered tree
embeddings. In this definition, we simply use ‘label
matching’ to refer to both type matching and
predicate checking.
Definition 1. Let P and T be rooted labeled trees.
We define an ordered embedding (f, P, T) as an
injective mapping f: V(P) → V(T) such that for all
nodes v, u ∈ V(P),
i) label(v) = label(f(v)); (label preservation
condition)
ii) if (v, u) is a c-edge, then f(v) is the parent of f(u);
(child condition)
iii) if (v, u) is a d-edge, then f(v) is an ancestor of
f(u); (ancestor condition)
iv) v is to the left of u iff f(v) is to the left of f(u).
(sibling condition)
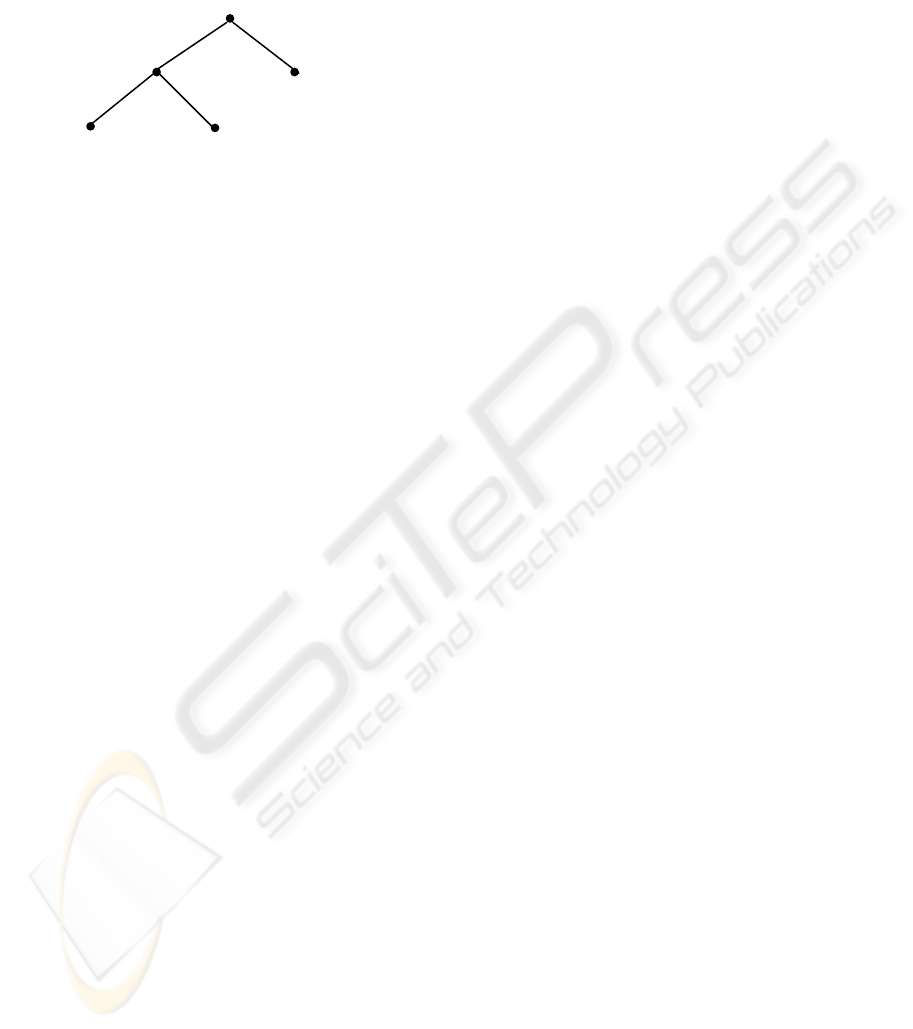
As an example, we show an ordered tree embedding
in Fig. 2.
In Fig. 2(a), the tree on the left can be embedded in
the tree on the right because a mapping as shown in
Fig. 2(b) can be recognized, which satisfies all the
conditions specified in Definition 1. In addition, Fig.
2(b) shows a special kind of tree embeddings, which
is very critic to the design of our algorithm and also
quite useful to explain the main idea of our design.
ON THE EVALUATION OF TREE PATTERN QUERIES
81

a
Figure 2: An example of ordered tree embedding.
Definition 2. Let P and T be trees. A root-
preserving embedding of P in T is an embedding f of
P in T such that f(root(P)) = root(T). If there is a
root-preserving embedding of P in T, we say that the
root of T is an occurrence of P.
For example, the tree embedding shown in Fig. 2(b)
is a root preserving embedding. Obviously,
restricting to root-preserving embedding does not
lose generality.
Finally, we use Lemma 2 to define an ordering of
the nodes of a forest F given by v v’ iff post(v) <
post(v’) and pre(v) < pre(v’). Also, v v’ iff v v’ or v
= v’. The left relatives, lr(v), of a node v ∈ V(F) is
the set of nodes that are to the left of v (i.e., all those
nodes that precede v both in preorder and postorder),
and similarly the right relatives, rr(v), is the set of
nodes that are to the right of v (i.e., all those nodes
that follow v both in preorder and postorder).
Throughout the rest of the paper, we refer to the
labeled trees simply as trees since we do not discuss
unlabeled trees at all.
3.2 Algorithm Description
The algorithm to be given is in fact a dynamic
programming solution. During the process, two m
×
n (m = |P|, n = |T|) matrices are maintained and
computed to discover tree embeddings. They are
described as follows.
1. The nodes in both P and T are numbered in
postorder, and the nodes are then referred to by their
postorder numbers.
2. The first matrix is used to record subtree
embeddings, in which each entry c
ij
(i ∈ {1, ..., m}, j
∈ {1, ..., n}) has value 0 or 1. If c
ij
= 1, it indicates
that there is a root preserving embedding of the
subtree rooted at the node indexed by i (in P) in the
subtree rooted at the node indexed by j (in T).
Otherwise, c
ij
= 0. This matrix is denoted by c(P, T).
3. In the second matrix, each entry d
ij
(i ∈ {1, ..., m},
j ∈ {0, ..., n - 1}) is defined as follows:
d
ij
= min({x ∈ rr(j) | c
ix
= 1} ∪ {α}),
where α = n + 1. That is, d
ij
contains the closest right
relative x of node j such that T[x] contains P[i], or n
+ 1, indicating that there exists no right relative x of
node j such that P[i] can be root-preservingly
embedded in T[x]. This matrix is denoted by d(P, T).
In the above definitions of matrices, we should
notice that the indexes of d(P, T) is slightly different
from those of c(P, T). That is, for d(P, T), j ∈ {0, ...,
n - 1} (instead of {1, ..., n}), and j = 0 is considered
to be a virtual node left to any node in T.
The matrix c(P, T) is established by running the
following algorithm, called ordered-tree-embedding
while d(P, T) is employed to facilitate the
computation. Initially, c
ij
= 0, and d
ij
= 0 for all i and
j. In addition, each node v in T is associated with a
quadruple (α(v), β(v), χ(v), δ(v)), where α(v) is v’s
preorder number, β(v) is v’s postorder number, χ(v)
is v’s level number, and δ(v) = min(desc(v)). By the
level number of v, we mean the number of ancestors
of v, excluding v itself. For example, the root of T
has the level number 0, its children have the level
number 1, and so on. Obviously, for two nodes v
1
and v
2
, associated respectively with (α
1
, β
1
, χ
1
, δ
1
)
and (α
2
, β
2
, χ
2
, δ
2
), if χ
2
= χ
1
+ 1, α
1
< α
2
and β
1
>
β
2
, we have v
2
∈ children(v
1
).
In the following algorithm, we assume that for T
there exists a virtual node with postorder number 0,
which is left to any node in T.
Algorithm ordered-tree-embedding(T, P)
Input: tree T (with nodes 0, 1, ..., n) and tree P (with nodes
1, ..., m)
Output: c(P, T), which shows the tree embedding.
begin
1. for u := 1, ..., m do
2. { for v := 0, ..., n - 1 do {d
uv
:= n + 1;}
3. l := 0;
4. for v := 1, ..., n do
5. {if label(u) = label(v) then
6. let u
1
, ..., u
k
be the children of u;
7. j := δ(v) - 1;
8. i := 1;
9. while i
≤
k and j < v do
10. {j := ;
ju
i
d
,
11. if (u, u
i
) is a d-edge then
12. {if j ∈ desc(v) then i := i + 1;
13. else /*(u, u
i
) is a c-edge.*/
14. {if j ∈ children(v) and j is a c-child
then i := i + 1;}
15. }}
16. if j = k then
17. {c
uv
:= 1;
18. while l ∈ lr(v) do {d
ul
; = v; l := l + 1;}
b
e
b
a
d
b
b
b
(a)
b
b
e
d
b
b
a
a
b
(b)
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
82
19. }
20.}
end
To know how the above algorithm works, we should
first notice that both T and P are postorder-
numbered. Therefore, the algorithm proceeds in a
bottom-up way (see line 1 and 4). For any node u in
P and any node v in T, if label(u) = label(v), the
children of u will be checked one by one against
some nodes in desc(v). The children of u is indexed
by i (see line 6); and the nodes in desc(v) is indexed
by j (see line 10). Assume that the nodes in desc(v),
which are checked during the execution of the
while-loop (see lines 9 - 15), are j
1
, ..., j
h
. Then,
each j
g
(1 ≤ g
≤
h) satisfies the following conditions
(see line 11):
(i) δ(v) - 1 < j
g
< v (i.e., j
g
∈ desc(v)),
(ii) j
g
= with j
0
= δ(v) - 1.
Therefore, for any j
a
and j
b
∈ {j
1
, ..., j
h
}, they must
be on different paths according to the definition of
d(P, T). In addition, in the while-loop, if (u, u
i
) is a
d-edge, the algorithm checks whether j ∈ desc(v)
(see line 12). If it is the case, u
i
has a matching
counterpart in desc(v) and i will be increased by 1.
Thus, in a next step, the algorithm will check the
direct right sibling of u
i
against a node that is one of
the right reletives of j. If (u, u
i
) is a c-edge, we will
check whether j ∈ children(v) (see line 14). In line
16, we will check whether i = k. If it is the case, we
have desc(v) contains all subtrees P[u
1
], ..., P[u
k
])
This indicates that we will have a root-preserving
embedding of P[u] in T[v]. Therefore, c
uv
is set to 1
(see line 17). Also, for any node l that is one of the
left relatives of v, d
ul
is set to 1 (see line 18). It is
because v must be the closest right relative of any of
such nodes in T such that the subtree rooted at it (i.e,
T[v]) root-preservingly contains P[u].
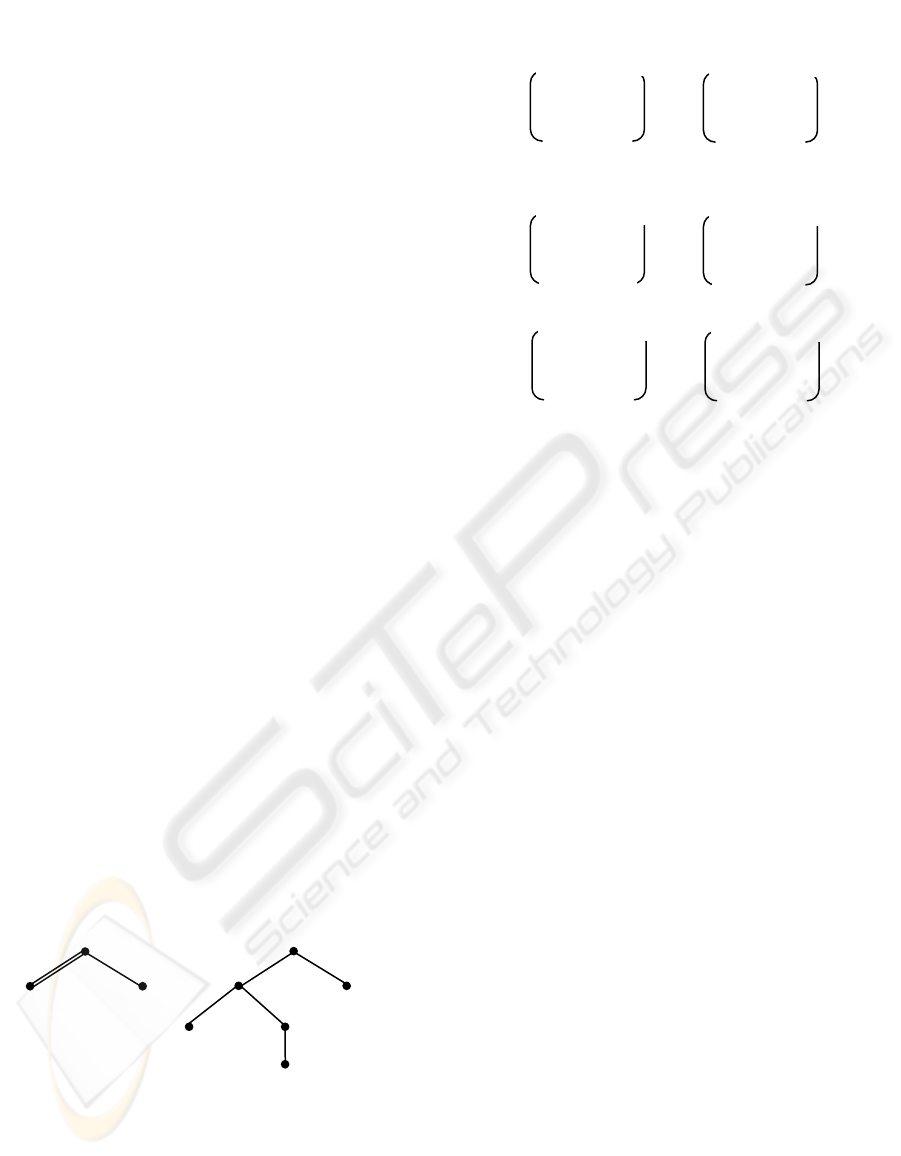
Example 1. As an example, consider the trees
shown in Fig. 3. The nodes in them are postorder
numbered.
Figure 3: Labeled trees and postorder numbering.
When we apply the algorithm to these two trees, c(P,
T) and d(P, T) will be created and changed in the
way as illustrated in Fig. 4, in which each step
corresponds to an execution of the outmost for-loop.
Figure 4: A sample trace.
In step 1, we show the values in c(P, T) and d(P, T)
after node 1 in P is checked against every node in T.
Since node 1 in P matches node 2, 3 and 5 in T, c
12
,
c
13
, and c
15
are all set to 1. Furthermore, d
10
is set to
2 since the closest right relative of node 0 in T,
which matches node 1 in P, is node 2 in T. The same
analysis applies to d
11
. Since the closest right
relative of node 2, 3, 4 in T, which matches node 1
in P, is node 5 in T, d
12
, d
13
, and d
14
are all set to 5.
Finally, we notice that d
14
is equal to 7, which
indicates that there exists no right relative of node 5
that matches node 1 in P.
In step 2, the algorithm generates the matrix entries
for node 2 in P, which is done in the same way as
for node 1 in P.
In step 3, node 3 in P will be checked against every
node in T, but matches only node 6 in T. Since it is
an internal node (in fact, it is the root of P), its
children will be further checked. First, to check its
first child, the algorithm will examine d
10
, which is
equal to 2, showing that node 2 in T is the closest
right relative of node 0 that matches node 1 in P. In
a next step, the algorithm will check the second
child of node 3 in P. To do this, d
22
is checked. d
22
’s
value is 5, showing that the closest relative of node 2
in T, which matches node 2 in P, is node 5 in T. In
addition, since the edge (3, 2) in P is a c-edge, the
algorithm will check whether node 5 in T is a child
of node 6. Since it is the case, we have a root-
preserving embedding of P[3] in T[6]. Finally, we
notice that when the second child of node 3 in P is
checked, the algorithm begins the checking from d
22
rather than d
20
. In this way, a lot of useless
checkings is avoided.
5
5
4
2
e
1 3
3
2 1
b
b
a
b
b
d
b
a
step 1:
c(
d(P, T)
P
,
T
)
0 1 1 0 1 0
0 0 0 0 0 0
000000
1
2
3
1 2 3 4 5 6
2 2 5 5 5 7
0 0 0 0 0 0
0 0 0 0 0 0
1 2 3 4 5 6
1
2
3
step 2:
c(P, T)
d(P, T)
0 1 1 0 1 0
0 1 1 0 1 0
000000
1
2
3
1 2 3 4 5 6
2 2 5 5 5 7
2 2 5 5 5 7
0 0 0 0 0 0
1 2 3 4 5 6
1
2
3
d(P, T)
step 3:
c(P, T)
0 1 1 0 1 0
0 1 1 0 1 0
000001
1
2
3
1 2 3 4 5 6
2 2 5 5 5 7
2 2 5 5 5 7
6 7 7 7 7 7
1 2 3 4 5 6
1
2
3
ON THE EVALUATION OF TREE PATTERN QUERIES
83

Proposition 1. Algorithm ordered-tree-embedding(
T, P) computes the values in c(P, T) and d(P, T)
correctly.
Proof. We prove the proposition by induction on the
sum of the heights of T and P, h. Without loss of
generality, assume that height(T) ≥ 1 and height(P)
≥ 1.
Basic step. When h = 2, the proposition trivially
holds.
Induction hypothesis. Assume that when h = l, the
proposition holds.
Consider T = <t; T
1
, ..., T
k
> and P = <p; P
1
, ..., P
q
>
with height(T) + height(P) = l + 1. Obviously, we
have height(T
i
) + height(P) ≤ l and height(T) +
height(P
j
) ≤ l. Therefore, in terms of the induction
hypothesis, the algorithm computes the values in
c(P, T
i
) and d(P, T
i
), as well as the values in c(P
j
, T)
and d(P
j
, T) correctly (i = 1, ..., k; j = 1, ..., q).
Assume that V(P) = {1, ..., m} and V(T) = {1, ..., n}.
Then, the values for c
ij
(i = 1, ..., m - 1; j = 1, ..., n -
1) and d
ij
(i = 1, ..., m - 1; j = 0, ..., n - 2) are all
correctly generated. Now we will check c
in
and d
i
,
n-1
(i = 1, ..., m), as well as c
mj
(j = 1, ..., n) and d
mj
(j =
0, ..., n - 1) to see whether they can be correctly
produced. Let i
1
, ..., i
s
be the children of i. If label(i)
= label(n), for each i
f
(1 ≤ f
≤
s), some ’s will be
checked. Obviously, i
ji
f
d
f
< i and j < n. According to the
induction hypothesis, all such ’s are correctly
generated. Depending on whether (i, i
ji
f
d
f
) is a d-edge
or c-edge, the algorithm will check whether j ∈
desc(n) or j ∈ children(n). In addition, any two
nodes j
1
and j
2
, which are checked against two
different children of i, are not on the same path.
Therefore, c
in
(i = 1, ..., m) is correctly created, so is
d
i
,n-1 (i = 1, ..., m). A similar analysis applies to c
mj
(j = 1, ..., n) and d
mj
(j = 0, ..., n - 1).
Proposition 2. Algorithm ordered-tree-embedding
(T, P) requires O(|T|⋅|P|) time and space.
Proof. During the execution of the outermost for-
loop, l may increases from 0 to n. Therefore, the
time spent on the execution of line 18 in the whole
process is bounded by O(n). An execution of the
while-loop from line 9 to 15 needs O(d
u
) time,
where d
u
represents the outdegree of node u in P. So
the total time is bounded by
O(n) + O( ) = O(n) + O( )
∑∑
==
m
u
n
v
u
d
11
∑∑
==
n
v
m
u
u
d
11
= O(n) + O( ) = O(n⋅m).
∑
=
n
v
m
1
Obviously, to maintain c(Q) and d(Q), we need
O(n
2
) space.
4 A STRATEGY BASED ON
UNORDERED TREE
EMBEDDING
Now we turn to the unordered version of the
problem, which appears to be essentially more
difficult. A tree P is an unordered included tree of a
tree T if the nodes of P can be injectively mapped
onto the nodes of T preserving the labels and the
ancestorship relation between nodes. Such a
mapping is called an unordered embedding. We do
not require the left-to-right order of the nodes to be
preserved in an unordered embedding. But sibling
nodes should not be mapped to those nodes that are
on the same path.
To facilitate the algorithm description, we will use
some concepts from the hypergraph theory (Berge,
1989).
Definition 3. Let U = {u
1
, …, u
n
} be a finite set of
nodes. A hypergraph on U is a family H = {E
1
, …,
E
l
} of subsets of U such that
(1) E
i
≠
Φ
(i = 1, 2, …, l)
(2) = U.
∪
l
i
i
E
1=
A simple hypergraph (or Sperner family) is a
hypergraph H = {E
1
, …, E
l
} such that
(3) E
i
⊂ E
j
⇒ i = j.
As for a graph H, the order of H, denoted by n(H), is
the number of nodes. The number of edges will be
denoted by m(H) and the rank(H) is defined to be
r(H) =
j
j
Emax . It can be proved that m(H) ≤
(Berge, 1989).
⎣⎦
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
2/n
n
Let A ⊂ U be a subset. We call the family
H
A
= {E
i
∩ A | 1 ≤ i ≤ l, E
i
∩ A E
i
≠
Φ
}
the sub-hypergraph induced by A.
Definition 4. Let H = {E
1
, …, E
l
} be a hypergraph
on U and H’ = {F
1
, …, H
l’
} be another hypergraph
on V. The product of H and H’, denoted as H × H’,
is a hypergraph, whose nodes are the elements of the
Cartesian product U × V, and whose edges are the
sets E
i
× F
j
with 1 ≤ i ≤ l and 1 ≤ j ≤ l’. Obviously,
n(H × H’) = n(H)n(H’) and m(H × H’) =m(H)m(H’).
However, if U = V, we have n(H × H’) = n(H) and
m(H × H’) ≤ .
⎣⎦
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
2/n
n
As with the ordered tree embedding, we will
maintain two matrices Q(P, T) and S(P, T) to control
the computation.
ICSOFT 2006 - INTERNATIONAL CONFERENCE ON SOFTWARE AND DATA TECHNOLOGIES
84

1. In Q(P, T), an entry q
ij
is 1 if the subtree rooted
at j in T includes the subtree rooted at i in P.
Otherwise, it is 0.
2. In S(P, T), each entry s
ij
is defined as follows.
Let i
1
, i
2
, …, i
k
be the child nodes of i. s
ij
is a
hypergraph H
i
= {E
1
, …, E
l
}over {i
1
, i
2
, …, i
k
}
such that T[j], the subtree rooted at j, includes
each E
g
(g = 1, …, l}, that is, for each E
g
, the
subtree rooted at j includes all the subtrees
rooted at the nodes in E
g
. But T[j] cannot
include E
i
∪ E
j
for any i, j ∈{1, …, l }.
Algorithm unordered-embedding(T, P)
Input: tree T (with nodes 1, ..., n) and tree P (with nodes 1,
..., m)
Output: Q(P, T), which shows the tree embedding.
begin
1. for v := 1, ..., n do
2. {for u := 1, ..., m do
3. {if q
uv
:= 0 then
4. {let v
1
, …, v
h
be the child nodes of v;
5. H := × … × ;
1
uv
s
2
uv
s
h
uv
s
6. let u
1
, …, u
k
be the child nodes of u;
7. if {u
1
, …, u
k
} ∈ H then set q
uv
to 1;
8. else s
uv
:= H;
9. }
10. }
11. let u
1
, …, u
l
be nodes covered by v;
12. for each ancestor v’ of v, := 1 for i = 1, …, l;
'vu
i
q
13. construct hypergraph H
= {{u
1
}, …, {u
l
}};
14. for u := 1, ..., m do
15. {let A be the set of u’s child nodes;
16. s
uv
:= H
A
;
17. }
20. }
End
The execution of line 5 will dominate the running
time of the algorithm. Let k be the largest out-degree
of any node in P. Then, the size of each s
uv
is
bounded by ≤ 2
⎣⎦
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
2/
k
k
k
. Especially, the size of
any product hypergraph of the form s
uv
× s
uv’
is
bounded by 2
k
(and so is s
uv
× s
uv’
× s
uv’‘
, …, and so
on.) So the time complexity of the algorithm is on
the order of O(|T|⋅|P|⋅2
2k
).
4 CONCLUSION
In this paper, a new strategy for evaluating XPath
queries is discussed. The main idea of the strategy is
to handle an XPath query as tree embedding
problem. Two strategies are proposed. One is or-
dered tree embedding based, and the other is
unordered tree embedding based. For the ordered
tree embedding problem, our algorithm needs only
O(|T|⋅|P|) time and O(|T|⋅|P|) space, where |T| and |P|
stands for the numbers of the nodes in the target tree
T and the pattern tree P, respectively. For the
unordered-tree embedding, we give an algorithm
that needs O(|T|⋅|P|⋅2
2k
) time, where k is the largest
out-degree of any node in P.
REFERENCES
C. Berge, Hypergraphs, Elsevier Science Publisher,
Amsterdam, 1989.
D.D. Chamberlin, J. Robie and D. Florescu, Quilt: An
XML Query Language for Heterogeneous Data
Sources, WebDB 2000.
A. Deutsch, M. Fernadez, D. Florescu, A Levy, and D.
Suciu, XML-QL: A Query Language for XML,
Technical report, World Wide Web Consortium, 1989,
http://www.w3.org/TR/Note-xml-ql.
D. Florescu and D. Kossman, Storing and Querying XML
Data using an RDBMS. IEEE Data Engineering
Bulletin, 22(3), 1999.
http://www.w3.org/TR/xpath.
D.E. Knuth, The Art of Computer Programming, Vol. 1,
Addison-Wesley, Reading, MA, 1969.
P. Ramanan, Efficient Algorithms for Minimizing Tree
Pattern Queries, ACM SIGMOD 2002, June 2002,
Madison, Wisconsin, USA.
J. Robie, J. Lapp, and D. Schach, XML Query Language
(XQL), 1998. http://www.w3.org/TandS/
QL/QL98/pp/ xql.html.
World Wide Web Consortium, Extensible Markup
Language (XML) 1.0. http//www.w3.org/TR/1998/
REC-xml/ 19980210, Febuary 1998.
World Wide Web Consortium, Extensible Style Language
(XML) Working Draft, Dec. 1998.
http//www.w3.org/TR/ 1998/WD-xsl-19981216.
G. Gottlob, C. Koch, and R. Pichler, Efficient Algorithms
for Processing XPath Queries, ACM Transaction on
Database Systems, Vol. 30, No. 2, June 2005, pp. 444-
491.
G. Gottlob, C. Koch, and K.U. Schulz, Conjunctive
Queries over Trees, in Proc. PODS 2004, June 2004,
Paris, France, pp. 189-200.
H. Wang, S. Park, W. Fan, and P.S. Yu, ViST: A Dynamic
Index Method for Querying XML Data by Tree
Structures, SIGMOD Int. Conf. on Management of
Data, San Diego, CA., June 2003.
H. Wang and X. Meng, On the Sequencing of Tree
Structures for XML Indexing, in Proc. Conf. Data
Engineering, Tokyo, Japan, April, 2005, pp. 372-385.
C. Zhang, J. Naughton, D. DeWitt, Q. Luo and G.
Lohman, “On Supporting Containment Queries in
Relational Database Management Systems, in Proc. of
ACM SIGMOD Intl. Conf. on Management of Data,
California, USA, 2001.
ON THE EVALUATION OF TREE PATTERN QUERIES
85
