
ITIHand: A Real System for Palmprint Identification
⋆
Jos
´
e Garc
´
ıa-Hern
´
andez, Roberto Paredes, Ismael Salvador and Javier Cano
Instituto Tecnol
´
ogico de Inform
´
atica
Universidad Polit
´
ecnica de Valencia
Camino de Vera s/n, 46071 Valencia (Spain)
Abstract. In the networked society there are a great number of systems that
need biometric identification, so it has become an important issue in our days.
Biometrics takes advantage of a number of unique, reliable and stable personal
physiological features, to offer an effective approach to identify subjects. This
identification can be based on palmprint features. At present work is described a
real biometric identification system based on palmprints that uses local features.
1 Introduction
The biometric automatic identification has become an important issue in our days. Bio-
metric identification methods [1, 2] are those that allow us to recognise a subject using
physiological or behavioural features. The pattern of palm hand lines is an example
of physiological feature used in our days [3, 4]. As in fingerprints identification, twin
brothers can be also distinguished because their palmprints are similar but not identical.
Moreover, palm hand features are more difficult to hide than finger features by dirt or
acidics.
In [4] we show a biometric identification method that uses local features of the
palmprint. Using local features with nearest neighbour search and a direct voting scheme
achieves excellent results for many image classification tasks [4–9].
In a typical classification scenario, each object is represented by a feature vector,
and a classification procedure like the k-NN rule, Gaussian Mixtures, Neural Networks,
etc is applied in order to formulate an hypothesis about the identity of a test vector that
represents a whole object. In the local feature case, however, each image is represented
by many feature vectors and a classification procedure is applied to formulate an hy-
pothesis about the identity of each vector. As each feature vector could be classified
into a different class, a decision scheme is required to finally decide the class of the test
image.
In this work we present a real implementation of one of the methods shown in [4].
First, we present the theoretical approach followed. Then a real implementation, its
hardware and software, is shown. Finally, some experiments and conclusions are re-
ported.
⋆
Work supported by the Spanish Project DPI2004-08279-C02-02
García-Hernández J., Paredes R., Salvador I. and Cano J. (2006).
ITIHand: A Real System for Palmprint Identification.
In Proceedings of the 2nd International Workshop on Biosignal Processing and Classification, pages 33-40
DOI: 10.5220/0001222900330040
Copyright
c
SciTePress

2 Theoretical Approach
ITIHand classification method is based on the use of local features. As said, local repre-
sentation implies that each image is scanned to compute many feature vectors belonging
to different regions of the image. These regions correspond to the pixels with higher in-
formation content. There is not a unique method to select pixels from the image or to
preprocess the image before pixels selection. In our work, we have used the local vari-
ance in a small window in order to select pixels and local equalisation to preprocess the
image. Both methods are shown in [4].
2.1 Image Preprocessing
Image preprocessing is performed by a single local equalisation function. In this type
of equalisation the image is cropped, starting in the upper-left corner, with a window
of size v, such as v ≪ D and being D × D the image dimension. A given equalisa-
tion function is applied to the cropped image. This process is repeated by moving the
crop all over the image and applying the equalisation for each one. In our case, the
used equalisation function is called histogram equalisation. In this function the result
is obtained using the cumulative density function of the image as a transfer function.
The result of this process is that the histogram becomes approximately constant for all
the gray values. For a given image of size M × N with G gray levels and cumulative
histogram H(g) this transfer function is given in equation (1).
T (g) =
G − 1
MN
H(g) (1)
In figure 1 an example of local equalisation using histogram equalisation is shown.
Fig.1. Equalisation example. Left: original image. Right: locally equalised image.
34

2.2 Local Features Extraction
As local features object codification method represents each image by many feature
vectors, once the image is preprocessed we select the n vectors with higher information
content. For this purpose, we have chosen a simple and fast method: the local variance
in a small window is measured for each pixel and the n pixels with a greater variance
are selected. In this work we have used a window with a fixed size of 5 × 5.
For each selected pixel, a w
2
-dimensional vector of grey values is obtained from
the preprocessed image by application of a w × w window around it, such as w ≪ D
and being D × D the image dimension. The dimension of the resulting vector is then
reduced from w
2
to 30 using Principal Component Analysis (PCA), thus obtaining a
compact local representation of the w × w window. A value of 30 for the dimension
has been chosen because this value provides the best performance in most previous
classification tasks. The process is illustrated in figure 2.
Fig.2. Local features extraction process.
2.3 Classification through a k-NN based Voting Scheme
In a global classifier, each object is represented by a feature vector, and a discrimination
rule is applied to classify a test vector that also represents one object. As discussed
before, local representation, however, implies that each image is scanned to compute
many feature vectors. Each one can be classified into a different class, and therefore a
decision scheme is required to finally decide a single class for a test image.
Let Y be a test image. Following the conventional probabilistic framework, Y can
be optimally classified in a class ˆc having the maximum posterior probability among
C classes. By applying the feature extraction process described in the previous section
to Y , a set of m
Y
feature vectors, {y
1
, . . . , y
m
Y
} is obtained. An approximation to
P (c
j
|Y ) can be obtained using the so called “sum rule” and then, the expression of ˆc
becomes:
ˆc = arg max
1≤j≤C
m
Y
X
i=1
P (c
j
|y
i
) (2)
35

In our case, posterior probabilities are directly estimated by k-Nearest Neighbours.
Let k
ij
the number of neighbours of y
i
belonging to class c
j
. Using this estimate in (2),
our classification rule becomes:
ˆc = arg max
1≤j≤C
m
Y
X
i=1
k
ij
(3)
That is, a class ˆc with the largest number of “votes” accumulated over all the feature
vectors belonging to the test image is selected. This justifies why techniques of this type
are often referred to as “voting schemes”.
3 The ITIHand Hardware
The ITIHand hardware is built by using an ABS-plastic box, whose size is 250 × 160 ×
150 mm (figure 3). An Unibrain Fire-i
T M
Digital Camera
1
is installed inside. Al-
though it is a color camera, we use it in gray-scale mode. High resolution images are
not required in this task. The camera captures the palmprint image that is seen through
a squared window in the top of the box. The image of the palmprint is lighted by 8
white led diodes. The ITIHand hardware has a FireWire interface, a DC 12V input and
a light switch. Its use is as simple as placing the hand over the window, as it is shown
in figure 3.
Fig.3. ITIHand device from different views and its use.
1
http://www.unibrain.com/1394
products/firei dig cam/digital camera pc.htm
36

4 The ITIHand Software
The ITIHand software is the implementation of the method shown in section 2 joined
with a graphical interface (figure 4). It uses GT K2.0 and runs on Linux operating sys-
tem. Its use is very intuitive and similar to other window-interface applications. On the
left of the interface we can see the image shown by the camera.
The software has 2 function modes: training (by clicking ”Entrenar Identificador”
button) and identification (by placing the hand as in figure 3 and clicking “Identificar”
button). Identification mode gives the name of the user who has placed the hand if he/she
is in the database previously acquired. The user is rejected by the system if he/she is
not. Train image acquisitions are performed by an external application that does not use
a graphical interface.
Fig.4. ITIHand software interface.
5 Experiments
The experiments were designed to estimate the performance of the ITIHand and the
procedure shown in section 2 that the ITIHand uses. So, this procedure is used in all
the experiments shown in this section. The experimental method was verification by
the True Imposter Protocol [10]. In this method the used database is split in two set.
While the samples included in the first one are used as clients the samples included in
the second one are used as impostors.
In the experiments we have used two databases: ITIHand database and PolyU Palm-
print Database [11], in order to evaluate the performance of the system with two differ-
ent and independent data bases.
On the one hand, the first group of experiments was done by using our own data-
base, which is called ITIHand database and was built by using the device. It comprises
images of the right palm of 53 ITI staff and collaborators, 3 samples per user. We split
the users in two sets, 25 were used as clients and 28 as impostors. For clients, we use 1
sample for training and 2 for testing. The number of local features obtained per image
37
(n) has been ranged from 100 to 500 with steps of 50. For clarifying we only show
the results using n = 250. This value is the smallest which we obtain the best result
for. Besides, the experiments were carried out with different values of local window
dimension (w × w) and equalisation window dimension (v × v).
The results are shown in table 1 for each combination of w and v. As can be seen,
ITIHand achieves a very good performance. For instance, for w = 19 and v = 12, False
Positive and False Negative Rates of 0% are achieved with a verification threshold of
0.16 with this database.
Table 1. Verification results of database made by use the ITIHand device.
(FP=False Positive.FN=False Negative.ER=Error Rate.THRES=Threshold).
w v FP (%) FN (%) ER (%) THRES
11 8 0.76 4.00 2.38 0.108001
15 8 0.14 0.00
0.07 0.140002
19 8 0.38 0.00
0.19 0.160002
11 10 2.38 0.00 1.19 0.092001
15 10 0.00 0.00
0.00 0.140002
19 10 0.05 0.00
0.02 0.152002
11 12 0.86 2.00 1.43 0.104001
15 12 0.05 0.00
0.02 0.136002
19 12 0.00 0.00
0.00 0.160002
On the other hand, the second group of experiments was done by using the PolyU
Palmprint Database, created by the Biometric Research Center of Hong Kong [11].
This database contains 600 grayscale palmprint images from 100 different palms, 6
images for each one. For clients we have selected 3 images for training and 3 for testing.
The database is more detailed in [11] and a bigger version is used and described in [3].
As in the previous database, the number of local features obtained per image (n) has
been ranged from 100 to 500 with steps of 50. For clarifying and an easier comparison
with the other database results, we only show the results using n = 250. Besides,
the experiments were also carried out with different values of local window dimension
(w × w) and equalisation window dimension (v × v). As this database is bigger than the
first one, we have done 3 different experiment by varying the users selected as clients
and as impostors. First, we have used 50 users as clients and 50 as impostors. Second,
we have used 75 users as clients and 25 as impostors. Finally, we have used 25 users as
clients and 75 as impostors. The results are shown, respectively, in tables 2, 3 and 4 for
each combination of w and v.
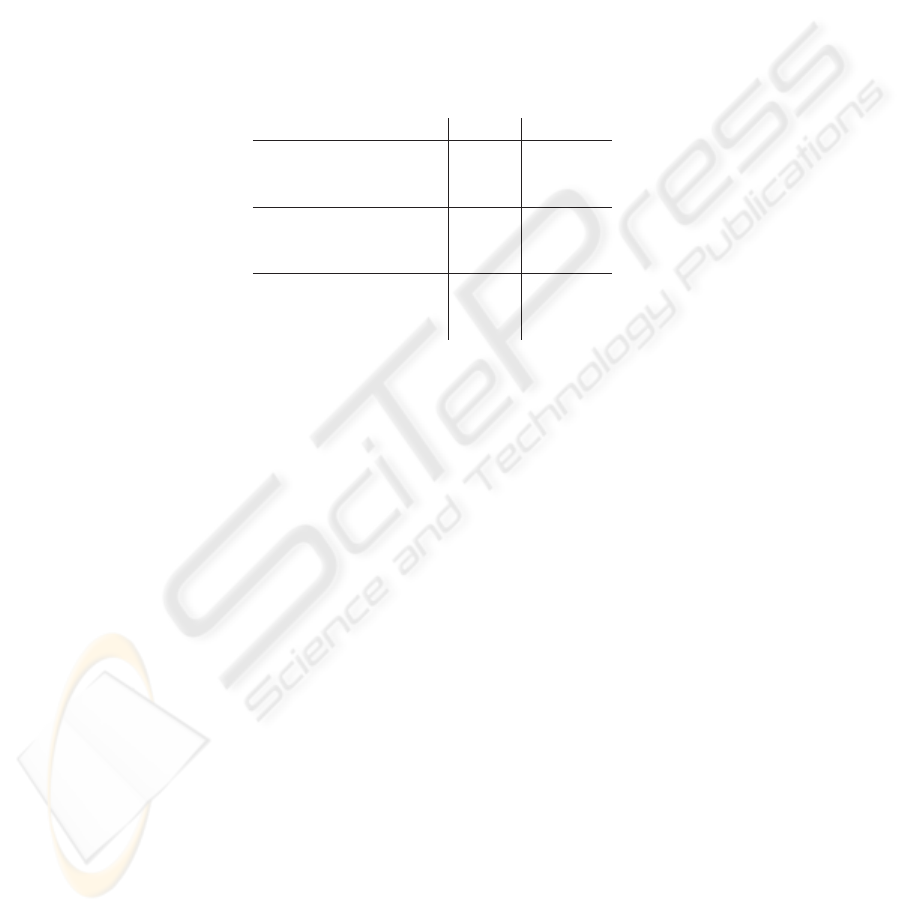
As can be seen, with this database the used method achieves a very good perfor-
mance too. For instance, for w = 19 and v = 12, False Positive Rate of 0.51% and
False Negative Rate of 0.67% are achieved with a verification threshold of 0.10 by us-
ing 50 clients as users and 50 as impostors. In our previous work [4], more experiments
with this second database are shown.
38
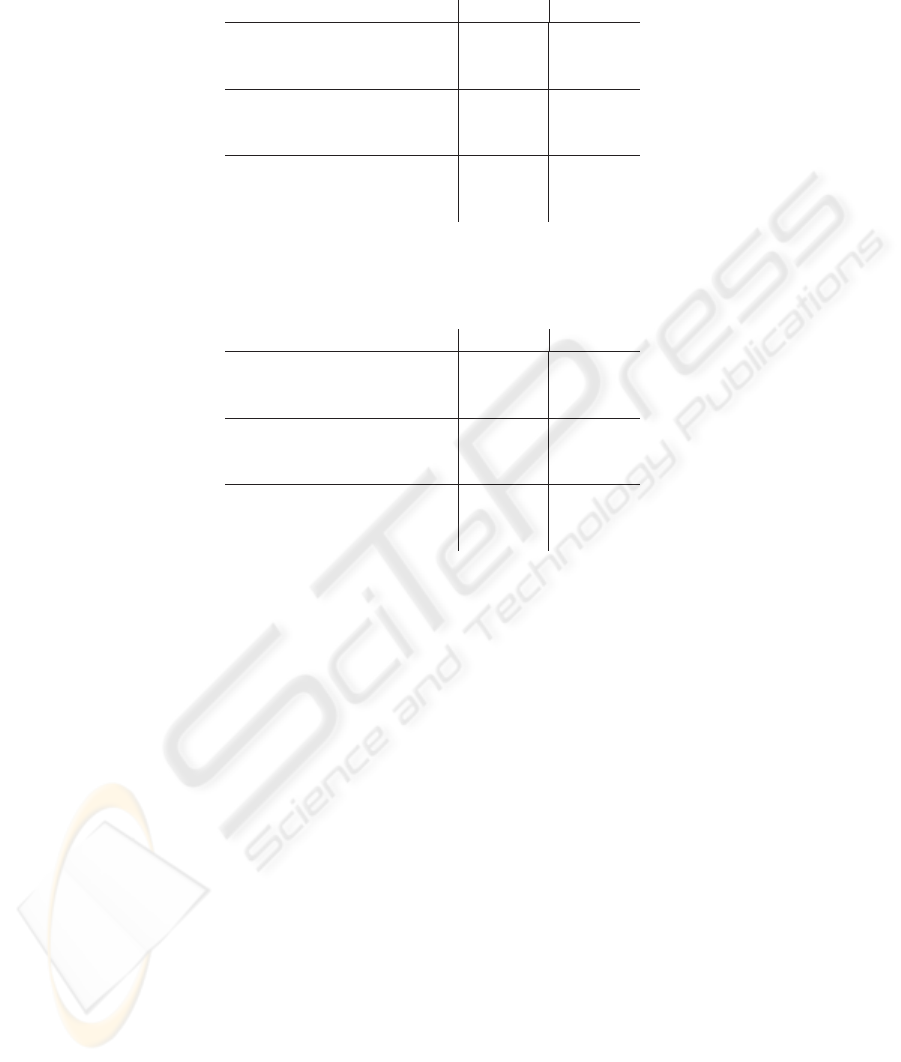
Table 2. Verification results with the PolyU Palmprint Database and 50 users as clients and 50
as impostors.(FP=False Positive.FN=False Negative.ER=Error Rate.THRES=Threshold).
w v FP (%) FN (%)
ER (%) THRES
11 8 1.666667 4.000000 2.833333 0.060000
15 8 2.100000 0.000000
1.050000 0.068001
19 8 0.140000 0.000000
0.070000 0.132002
11 10 1.040000 4.000000 2.520000 0.067901
15 10 0.673333 1.333333
1.003333 0.091901
19 10 0.680000 0.000000
0.340000 0.100001
11 12 1.346667 3.333334 2.340000 0.063901
15 12 1.280000 0.666667
0.973333 0.076001
19 12 0.513333 0.666667
0.590000 0.103901
Table 3. Verification results with the PolyU Palmprint Database and 75 users as clients and 25
as impostors. (FP=False Positive.FN=False Negative.ER=Error Rate.THRES=Threshold).
w v FP (%) FN (%)
ER (%) THRES
11 8 0.577778 2.222222 1.400000 0.051900
15 8 1.040000 0.000000
0.520000 0.052000
19 8 0.044444 0.000000
0.022222 0.108001
11 10 0.515556 2.222222 1.368889 0.051900
15 10 0.657778 0.444444
0.551111 0.056000
19 10 0.231111 0.000000
0.115556 0.084001
11 12 0.862222 1.777778 1.320000 0.044000
15 12 0.266667 0.888889
0.577778 0.067901
19 12 0.595556 0.000000
0.297778 0.064001
6 Conclusions and Future Work
A real implementation to automatically identify subjects by using the palm print fea-
tures has been presented. The hardware is made by using cheap and easy to find com-
ponents. It is very easy to build in a little time with common and simple tools.
It uses local features and the classification method previously presented in [4]. The
graphical interface is made by using a well known graphical tool as GT K2.0. In this
moment, the ITIHand system is being used for acquiring more samples for the database.
For this purpose, more right palms of ITI staff and collaborators are being acquired. On
the other hand, the device must be understood as a prototype. We are working on a
smaller one in order to include it in an entry-phone access control.
Future work will be focus in three main areas. First an evaluation of other pre-
processing methods, like gabor filters. Second, to improve local features classification:
applying global constrains over the relative placement of the local features and/or using
other local features selection methods (more discriminative). Third, to use other illumi-
nation source, for instance infrared light, and/or to place the light source in a different
plane with respect to the palm print to obtain more contrast of the ridges and valleys of
the palm print.
39
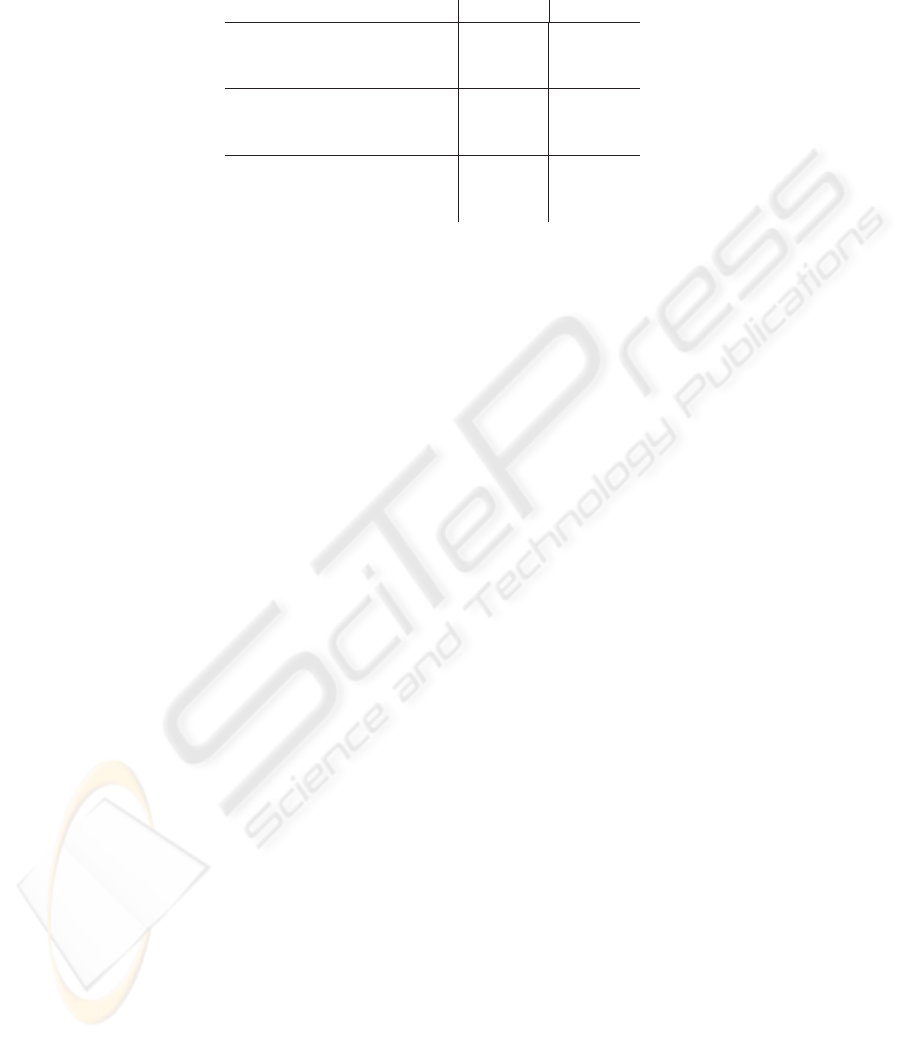
Table 4. Verification results with the PolyU Palmprint Database and 25 users as clients and 75
as impostors. (FP=False Positive.FN=False Negative.ER=Error Rate.THRES=Threshold).
w v FP (%) FN (%)
ER (%) THRES
11 8 7.626667 1.333333 4.480000 0.083901
15 8 2.320000 1.333333
1.826667 0.120001
19 8 0.373333 0.000000
0.186667 0.184003
11 10 1.902222 9.333333 5.617778 0.111901
15 10 2.844444 0.000000
1.422222 0.112001
19 10 1.244444 0.000000
0.622222 0.144002
11 12 4.017778 5.333333 4.675556 0.092001
15 12 1.751111 2.666667
2.208889 0.120001
19 12 0.951111 0.000000
0.475556 0.144002
References
1. Delac, K., Grgic, M.: A survey of biometric recognition methods. In: 46th International
Symposium Electronics in Marine, ELMAR-2004, Zadar, Croatia (2004)
2. Bolle, R., Pankanti, S.: Biometrics, Personal Identification in Networked Society. Kluwer
Academic Publishers (1998)
3. Zhang, D., Kong, W.K., You, J., Wong, M.: Online palmprint identification. IEEE Transac-
tion on Pattern Analysis and Machine Learning 25 (2003) 1041–1050
4. Garc
´
ıa-Hern
´
andez, J., Paredes, R.: Biometric identification using palmprint local features.
In: 3nd COST 275 Workshop. Biometrics on the Internet Fundamentals, Advances and Ap-
plications. (2005) 11–14
5. Paredes, R., Vidal, E.: Learning prototypes and distances (lpd). a prototype reduction tech-
nique based on nearest neighbor error minimization. In: In ICPR 2004. (2004) 442–445
6. Paredes, R., P
´
erez, J.C., Juan, A., Vidal, E.: Face Recognition using Local Representations
and a direct Voting Scheme. In: Proc. of the IX Spanish Symposium on Pattern Recognition
and Image Analysis. Volume I., Benic
`
assim (Spain) (2001) 249–254
7. Paredes, R., P
´
erez, J.C., Juan, A., Vidal, E.: Local Representations and a direct Voting
Scheme for Face Recognition. In: Proc. of PRIS 01. (2001)
8. Keysers, D., Paredes, R., Ney, H., Vidal, E.: Combination of tangent vectors and local rep-
resentations for handwritten digit recognition. In: In SPR 2002. (2002)
9. Paredes, R., Keysers, D., Lehmann, T., Wein, B.B., Ney, H., Vidal, E.: Classification of
medical images using local representations. In: BVM 2002, Bildverarbeitung f
¨
ur die Medizin
2002. (2002)
10. Li, S.Z., Jain, A.K., eds.: Handbook of Face Recognition. Springer (2004)
11. : Polyu palmprint database. (http://www.comp.polyu.edu.hk/∼biometrics/)
40
