
NEURO-ADAPTIVE DYNAMIC CONTROL FOR TRAJECTORY
TRACKING OF MOBILE ROBOTS
Marvin K. Bugeja† and Simon G. Fabri‡
Department of Electrical Power and Control Engineering, University of Malta
Msida MSD06, Malta
Keywords:
Nonholonomic mobile robots, trajectory tracking, adaptive control, neural networks, stochastic estimation.
Abstract:
This paper presents a novel functional-adaptive dynamic controller for trajectory tracking of nonholonomic
wheeled mobile robots. The controller is developed in discrete-time and employs a Gaussian radial basis
function neural network for the estimation of the robot’s nonlinear dynamic functions, which are assumed
to be completely unknown. Optimal on-line weight tuning is achieved by employing the Kalman filter algo-
rithm, based on a specifically formulated stochastic inverse dynamic identification model of the mobile base.
A discrete-time dynamic control law employing the estimated functions is proposed and cascaded with a tra-
jectory tracking kinematic controller. The performance of the complete system is analysed and compared by
realistic simulations.
1 INTRODUCTION
Motion control of nonholonomic mobile robots has
been receiving considerable attention for the last fif-
teen years (Kolmanovsky and McClamroch, 1995).
This activity is not only justified by the vast array
of existing and potential practical applications (Lami-
raux et al., 2005; Ding and Cooper, 2005), but also by
some particularly interesting theoretical challenges.
In particular, most mobile configurations manifest re-
stricted mobility; giving rise to nonholonomic con-
straints in the kinematics. Moreover the majority of
mobile vehicles are underactuated, since they have
more degrees of freedom than control inputs. Con-
sequently the linearised kinematic model lacks con-
trollability, full-state feedback linearisation is out of
reach (Canudas de Wit et al., 1993), and pure, smooth,
time-invariant feedback stabilisation of the Cartesian
kinematic model is unattainable (Brockett, 1983).
Originally researchers focused only on kinematic
control of nonholonomic vehicles (Crowley, 1989;
Kanayama et al., 1990; Canudas de Wit et al., 1993;
Kolmanovsky and McClamroch, 1995), assuming
that the control signals instantaneously establish the
desired robot velocities. This is commonly known
as perfect velocity tracking(Fierro and Lewis, 1995).
This approach may be reasonably valid for light ro-
bots following low acceleration trajectories. How-
ever it stands to reason that controllers based on a
full dynamic model (Sarkar et al., 1994; Fierro and
Lewis, 1995; Corradini and Orlando, 2001) capture
better the behaviour of real robots because they ac-
count for dynamic effects such as mass, friction and
inertia, which are otherwise neglected by a mere kine-
matic controller. On the other hand, the exact val-
ues of the parameters in the dynamic model are often
uncertain or even unknown, and may even vary over
time. A typical case is that of a mobile robot carrying
unspecified loads, and/or moving on several surfaces
with different frictional conditions.
These factors call for the development of adap-
tive dynamic controllers to better handle unmod-
elled robot dynamics, as well as noise and exter-
nal disturbances. Addressing of these advanced con-
trol issues of robustness and adaptation for the dy-
namic/kinematic control of nonholonomic mobile ro-
bots is a recent development. Some researchers opt to
use pre-trained function estimators, specifically arti-
ficial neural networks (ANNs), to render nonadaptive
conventional controllers more robust in the face of un-
certainty (Corradini et al., 2003; Oubbati et al., 2005).
These techniques require prior off-line training and
remain blind to variations and situations which take
place after the training phase. In contrast to the claim
in (Oubbati et al., 2005) such techniques cannot be
considered as adaptive because this requires real-time
404
Bugeja M. and Fabri S. (2006).
NEURO-ADAPTIVE DYNAMIC CONTROL FOR TRAJECTORY TRACKING OF MOBILE ROBOTS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 404-411
DOI: 10.5220/0001218904040411
Copyright
c
SciTePress
and continuous online training. To account for para-
metric variations in the kinematic/dynamic model,
adaptive control (Fukao et al., 2000) and robust slid-
ing mode control (Corradini and Orlando, 2001) has
also been proposed. Yet another approach is that of
online functional-adaptive control, where the uncer-
tainty is not restricted to parametric terms, but cov-
ers also the dynamic functions themselves. We con-
sider this to be more general and superior in handling
higher degrees of uncertainty and unmodelled dynam-
ics (Fierro and Lewis, 1998; de Sousa et al., 2002;
Bugeja and Fabri, 2005).
In all these works, only Corradini et al. [2003] and
Bugeja and Fabri [2005] develop the corresponding
control algorithms in discrete-time. This is a relevant
contribution because in practice robot controllers are
ultimately implemented digitally on computer hard-
ware. The control algorithm proposed by Corradini et
al. [2003] is however not adaptive since it requires
off-line training. It also considers solely the kine-
matic aspect of nonholonomic mobile robots, as does
the adaptive method proposed by Bugeja and Fabri
[2005]. The control scheme being proposed in this
paper conforms with the discrete-time philosophy of
the previous two papers, but addresses their limita-
tions by proposing online functional adaptive control
of the full dynamic model of the nonholonomic mo-
bile robot.
This paper proposes a Gaussian radial basis func-
tion (RBF) ANN to estimate the robot’s nonlinear
dynamic functions, which are assumed to be com-
pletely unknown. The ANN parameters are estimated
stochastically in real-time with no preliminary off-
line training by employing the Kalman filter algo-
rithm (Kalman, 1960). The estimated functions are
used on a certainty equivalence (van de Water and
Willems, 1981) basis in a discrete-time dynamic con-
trol law cascaded with a trajectory tracking kinematic
controller. The stochastic nature of the ANN weight
estimator is attractive for two main reasons: it pro-
vides a direct way to account for practically inevitable
process and measurement noise; and it provides a di-
rect measure of the estimation uncertainty through the
Kalman covariance matrix. We plan to use the lat-
ter in the development of stochastic controllers in the
nearby future to avoid certainty equivalence assump-
tions.
Section 2 of this paper will develop the stochas-
tic discrete-time inverse dynamic model of the robot.
This is then utilised for identification in the online
stochastic estimator based on a Gaussian RBF ANN
in Section 3. A discrete-time adaptive control law is
proposed and incorporated with the recursive weight
tuning algorithm in Section 4. The performance of
the complete system is analysed and compared by re-
alistic simulation results in Section 5, and conclusions
are provided in Section 6.
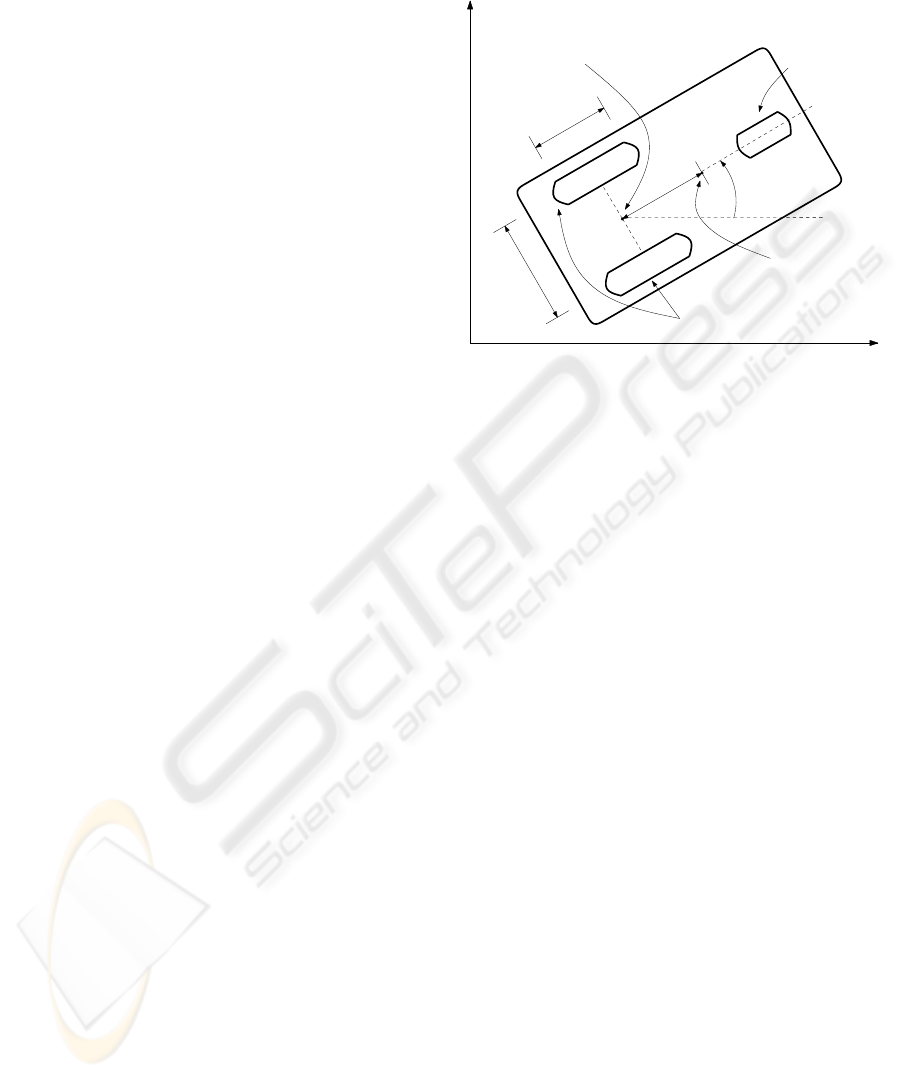
2 PRELIMINARIES
x
y
2r
2b
d
P
o
P
c
φ
Driving wheels
Passive
wheel
Centre of
mass
Geometric
centre
Figure 1: Differentially driven wheeled mobile robot.
This paper considers the differentially driven wheeled
mobile platform depicted in Figure 1. We ignore the
passive wheel and adopt the following notation.
P
o
: midpoint between the two wheels
P
c
: centre of mass of the platform without wheels
d: distance from P
o
to P
c
b: distance from each wheel to P
o
r: radius of each wheel
m
c
: mass of the platform without wheels
m
w
: mass of each wheel
I
c
: moment of inertia of the platform about P
c
I
w
: moment of inertia of wheel about its axle
I
m
: moment of inertia of wheel about its diameter
The robot dynamic state can be expressed as a
five dimensional vector q , [x y φ θ
r
θ
l
]
T
, where
(x, y) is the coordinate of P
o
, φ is the robot orien-
tation angle with reference to the xy frame, θ
r
and
θ
l
are the angular displacements of the right and left
driving wheels respectively. The pose of the robot
refers to the three-dimensional vector p , [x y φ].
2.1 Kinematics
Assuming that the driving wheels roll without slip-
ping, the mobile platform is subject to three kinematic
constraints, two of which are nonholonomic (Sarkar
et al., 1994). The three kinematic constraints can be
written in the form
A(q) ˙q = 0, (1)
where
A =
"
− sin φ cos φ 0 0 0
cos φ sin φ b −r 0
cos φ sin φ −b 0 −r
#
. (2)
NEURO-ADAPTIVE DYNAMIC CONTROL FOR TRAJECTORY TRACKING OF MOBILE ROBOTS
405

Furthermore, it is straightforward to verify that
A(q)S(q) = 0 where
S =
r
2
cos φ
r
2
cos φ
r
2
sin φ
r
2
sin φ
r
2b
−
r
2b
1 0
0 1
. (3)
The kinematic state-space model of the wheeled mo-
bile robot (WMR) in Figure 1 can now be expressed
as
˙q = S(q)ν, (4)
where ν represents a column vector composed of the
angular velocities of the two driving wheels, specifi-
cally ν = [ν
r
ν
l
]
T
=
h
˙
θ
r
˙
θ
l
i
T
.
2.2 Dynamics
The WMR under consideration is a mechanical sys-
tem with the kinematic constraints given in (1). Its
dynamic equations of motion can be written in matrix
form as (Sarkar et al., 1994):
M(q)¨q+V ( ˙q, q) ˙q+F ( ˙q) = E(q)τ −A
T
(q)λ, (5)
where M(q) is the inertia matrix, V ( ˙q, q) is the cen-
tripetal and Coriolis matrix, F ( ˙q) is a vector of fric-
tional forces, E(q) is the input transformation matrix,
τ is the input torque vector and λ is the vector of con-
straint forces.
Differentiating (4) with respect to time, substi-
tuting the expression for ¨q in (5), premultiplying
the resulting expression by S
T
(q), and noting that
S
T
(q)A
T
(q) = 0 we get
M ˙ν + V ( ˙q)ν + F ( ˙q) = Eτ . (6)
It can be shown that:
M =
"
r
2
4b
2
(mb
2
+ I) + I
w
r
2
4b
2
(mb
2
− I)
r
2
4b
2
(mb
2
− I)
r
2
4b
2
(mb
2
+ I) + I
w
#
V ( ˙q) =
"
0
m
c
r
2
d
˙
φ
2b
m
c
r
2
d
˙
φ
2b
0
#
(7)
F ( ˙q) = S
T
(q)F ( ˙q)
E =
1 0
0 1
,
where I = (I
c
+ m
c
d
2
) + 2(I
m
+ m
w
b
2
) and
m = m
c
+ 2m
w
. From (6) and (7) it is straight-
forward to note that the nonlinearities in the WMR
dynamics can be totally attributed to
V ( ˙q) and F ( ˙q),
since M is a constant matrix. Moreover, it is interest-
ing to note that
M is invertible for all possible values
of the WMR parameters and that
V ( ˙q) is effectively
a function of ν only, since
˙
φ =
r
2b
(ν
r
− ν
l
) as can
be seen in (3) and (4).
We will now discretise the continuous-time dynam-
ics in (6) to account for the fact that the controller
is implemented on a digital computer system. Us-
ing a first order explicit forward Euler approximation
with sampling interval T seconds and assuming that
the control input vector τ remains constant over each
sampling interval, the following discrete-time inverse
dynamic model is obtained:
τ
k−1
= f
k−1
+ G (ν
k
− ν
k−1
) , (8)
where the subscript integer k denotes that the corre-
sponding variable is evaluated at sample time instant
kT seconds. We assume that the sampling interval
is chosen low enough for the Euler approximation to
hold. Vector f
k−1
and matrix G are given as:
f
k−1
=
V
k−1
ν
k−1
+ F
k−1
G =
1
T
M . (9)
To account for noise, uncertainty and disturbances
we introduce additively a vector of discrete white
noise ǫ
k
. The deterministic model in (8) is hence con-
verted to the following nonlinear, stochastic, discrete-
time inverse dynamic model of the WMR:
τ
k−1
= f
k−1
+ G (ν
k
− ν
k−1
) + ǫ
k
, (10)
where ǫ
k
is assumed to be an independent, zero-mean,
white, Gaussian-distributed process, with covariance
matrix R. Identification of this model is described in
the next section.
3 GAUSSIAN RBF ESTIMATOR
Theoretically speaking, at any time instant kT the
vector of discrete functions f
k
and the constant ma-
trix G, composing the WMR inverse dynamic model
in (10), are both known and given in (9). This is true
if one assumes that: there are no unmodelled dynam-
ics, the robot parameters such as masses, inertias and
frictions are perfectly known and do not change over
time, and that perfect sensor measurements are avail-
able. To conform with these stringent conditions in
a real life scenario is practically impossible. To ad-
dress these issues we opt to use functional-adaptive
control via a RBF ANN for the recursive estimation
of the vector of discrete nonlinear functions f
k
, as if
it was completely unknown. On the other hand, it is
known that G is a constant and symmetrical matrix
with unknown elements. Consequently its estimation
does not require the use of an ANN, and so we in-
tegrate the estimation of the elements of G within
the same Kalman filter algorithm used for the ANN
weight training, as detailed later in Subsection 3.1.
ICINCO 2006 - ROBOTICS AND AUTOMATION
406

The selection of a Gaussian RBF network (Pog-
gio and Girosi, 1990) for the estimation of f
k
, was
motivated by the fact that the RBF network weights
appear linearly in the final state-space output equa-
tion (Fabri and Kadirkamanathan, 1998). This de-
tail enables the use of a standard Kalman filter for
weight estimation, leading to the least-squares-sense
optimal tuning of the network weights. In our pre-
vious work (Bugeja and Fabri, 2005), which dealt
with adaptive kinematic control of WMR, multilayer
perceptron (MLP) ANN were used for the estimation
process. Unlike the Gaussian basis functions in RBFs,
the sigmoidal activation functions used in MLPs are
not localised, implying that typically MLP networks
require less neurons than RBF networks for the same
degree of accuracy. However MLP networks do not
posses the possible advantage of linearity, as in the
case of RBF networks. As a result the former Kalman
filter has to be replaced by a sub-optimal, nonlinear
stochastic estimator, like the extended Kalman filter
(EKF) (Maybeck, 1979), which complicates the algo-
rithm and introduces significant approximations.
3.1 Formulation
φ
T
f
(x
f
k−1
) ˆw
1
k
φ
T
f
(x
f
k−1
) ˆw
2
k
=
ˆ
f
k−1
x
f
k−1
ˆw
1
k
ˆw
2
k
φ
f
1
φ
f
2
φ
f
L
f
+
+
Figure 2: RBF neural network.
Consider the following definitions, in the light of the
employed RBF ANN depicted in Figure 2.
• x
f
k−1
represents the neural network input vector
defined as:
x
f
k−1
, ν
k−1
. (11)
This state vector is assumed to be contained within
the compact set χ
f
⊂ R
2
.
• φ
f
(x
f
) is the Gaussian RBF vector, whose ith el-
ement is given by
φ
f
i
= exp
(
(x
f
− m
f
i
)
T
R
−1
f
(x
f
− m
f
i
)
−2
)
(12)
where m
f
i
is the coordinate vector of the center of
the ith basis function and R
f
is the corresponding
covariance matrix. The basis functions are placed
on a regular grid within the corresponding compact
set by setting the vector m
f
i
accordingly. Simi-
larly the RBF covariance matrix is fixed a priori
to some value corresponding to the required width
of the basis functions. Sanner and Slotine [1992]
show that with knowledge of the bounds on the fre-
quency characteristics of the functions being esti-
mated, the number of basis functions and their cor-
responding means and covariance matrices can be
selected. Simulation results indicate that the place-
ment and covariance of the RBFs is not critical for
the overall performance of the controller.
• L
f
denotes the number of basis functions, and
ˆ
f
k−1
denotes the neural network output, corre-
sponding to the estimate of f
k−1
.
• The neural network architecture depicted in Figure
2 yields the following input-output relation for the
the ANN:
ˆ
f
k−1
=
"
φ
T
f
(x
f
k−1
) ˆw
1
k
φ
T
f
(x
f
k−1
) ˆw
2
k
#
, (13)
where ˆw
i
k
represents the weight vector of the con-
nection between the RBFs and the ith output ele-
ment of the neural network.
• As mentioned previously the estimation of G does
not require the use of an ANN, since it is made up
of constant elements. Additionally, it is a symmet-
rical matrix and this property is exploited to con-
struct its estimate at time instant (k −1) as follows:
ˆ
G
k−1
=
"
ˆg
1
k−1
ˆg
2
k−1
ˆg
2
k−1
ˆg
1
k−1
#
, (14)
where ˆg
1
k−1
and ˆg
2
k−1
represent the unknown ele-
ments of
ˆ
G
k−1
.
• Φ
k−1
, Γ
k,k−1
, ˆw
f
k
and ˆw
G
k
are defined as fol-
lows:
Φ
k−1
,
"
φ
T
f
0
T
f
0
T
f
φ
T
f
#
, (15)
where 0
f
is a zero vector having the same length
as φ
f
, and the time index (k − 1) indicates that φ
f
is evaluated for x
f
k−1
,
Γ
k,k−1
,
"
(ν
r
k
− ν
r
k−1
) (ν
l
k
− ν
l
k−1
)
(ν
l
k
− ν
l
k−1
) (ν
r
k
− ν
r
k−1
)
#
(16)
ˆw
f
k
,
ˆw
T
1
k
ˆw
T
2
k
T
(17)
and
ˆw
G
k
,
h
ˆg
T
1
k−1
ˆg
T
2
k−1
i
T
. (18)
NEURO-ADAPTIVE DYNAMIC CONTROL FOR TRAJECTORY TRACKING OF MOBILE ROBOTS
407

Assume that inside the compact set χ
f
, the neural
network approximation error is negligibly small when
the weight vector ˆw
f
k
is equal to some optimal value
denoted by w
∗
f
k
. This is justified in the light of
the Universal Approximation Theorem of neural net-
works (Fabri and Kadirkamanathan, 2001). More-
over, let w
∗
G
k
represent the optimal estimate for ˆw
G
k
.
It follows that the WMR stochastic inverse dynamic
model in (10) can be rewritten, using the optimally
weighted approximations
ˆ
f
k−1
and
ˆ
G
k−1
to replace
f
k−1
and G respectively. The resulting model is
given by:
τ
k−1
= Φ
k−1
w
∗
f
k
+ Γ
k,k−1
w
∗
G
k
+ ǫ
k
. (19)
Regrouping (19) in matrix form we get:
τ
k−1
= H
k,k−1
w
∗
k
+ ǫ
k
, (20)
where
H
k,k−1
, [Φ
k−1
.
.
. Γ
k,k−1
] (21)
and
w
∗
k
, [w
∗
f
k
T
.
.
. w
∗
G
k
T
]
T
. (22)
It is proper to note that w
∗
k
is completely unknown
and need to be estimated. However (20) clearly indi-
cates that the optimal weight vector w
∗
k
appears lin-
early in the output equation. This feature is exploited
in the recursive weight tuning process detailed in the
following section.
4 ADAPTIVE CONTROL
4.1 Online Training
Having derived the stochastic model (20), for the
WMR inverse dynamics that is dependent on the RBF
network through H
k,k−1
, and the optimal weight vec-
tor w
∗
k
, it is straightforward to rewrite it in the fol-
lowing linear state-space form to be used within the
Kalman filter algorithm, in predictive mode, to enable
the recursive estimation of the optimal weight vector:
w
∗
k+1
= w
∗
k
τ
k−1
= H
k,k−1
w
∗
k
+ ǫ
k
,
(23)
It is assumed that:
• The initial optimal parameter vector w
∗
0
is
Gaussian with mean ¯w and covariance V ,
• ǫ
k
and w
∗
0
are independent.
From Kalman filter theory (Kalman, 1960; May-
beck, 1979), it follows that the following recursive
weight adjustment rules can be employed for the esti-
mation of the optimal weight vector as follows:
P
k+1
= P
k
− K
k
H
k,k−1
P
k
(24)
ˆw
k+1
= ˆw
k
+ K
k
i
k
(25)
ˆw
k
, [ ˆw
T
f
k
.
.
. ˆw
T
G
k
]
T
, (26)
where ˆw
k
is the recursive estimate to the optimal
weight vector w
∗
k
, K
k
is the Kalman gain matrix
given by:
K
k
= P
k
H
T
k,k−1
[H
k,k−1
P
k
H
T
k,k−1
+ R]
−1
, (27)
and i
k
is the innovations vector given by:
i
k
= τ
k−1
− H
k,k−1
ˆw
k
. (28)
P
k
denotes the prediction covariance matrix and rep-
resents a measure of belief in the estimate ˆw
k
.
The initial estimates for the weight vector ˆw
0
and
the prediction covariance P
0
are set to some arbitrar-
ily values. Note that high initial covariance values
are the most appropriate since we assume no prelim-
inary knowledge of ˆw
0
. For each estimate of ˆw
k+1
,
the corresponding estimates
ˆ
f
k
and
ˆ
G
k
are computed
using (13), (14) and the associated relations formu-
lated in Subsection 3.1. These estimates are then used
recursively in the discrete-time dynamic control law
detailed in the following subsection. In contrast to
(Oubbati et al., 2005) this feature renders the over-
all control scheme truly adaptive, since the dynamic
WMR functions used for control, are estimated in
real-time and require no preliminary off-line training.
Note that the extra computational burden that
comes along with the Kalman filter pays off in sev-
eral ways. Primarily, it renders the recursive weight
tuning algorithm optimal under the specified assump-
tions. Secondly, the conditional probability density
of the weight vector ˆw
k+1
is being updated in real-
time. The resulting information, most importantly the
covariance matrix P
k+1
, is essential in the design of
stochastic control laws (Fabri and Kadirkamanathan,
2001), which are part of our plan for future work.
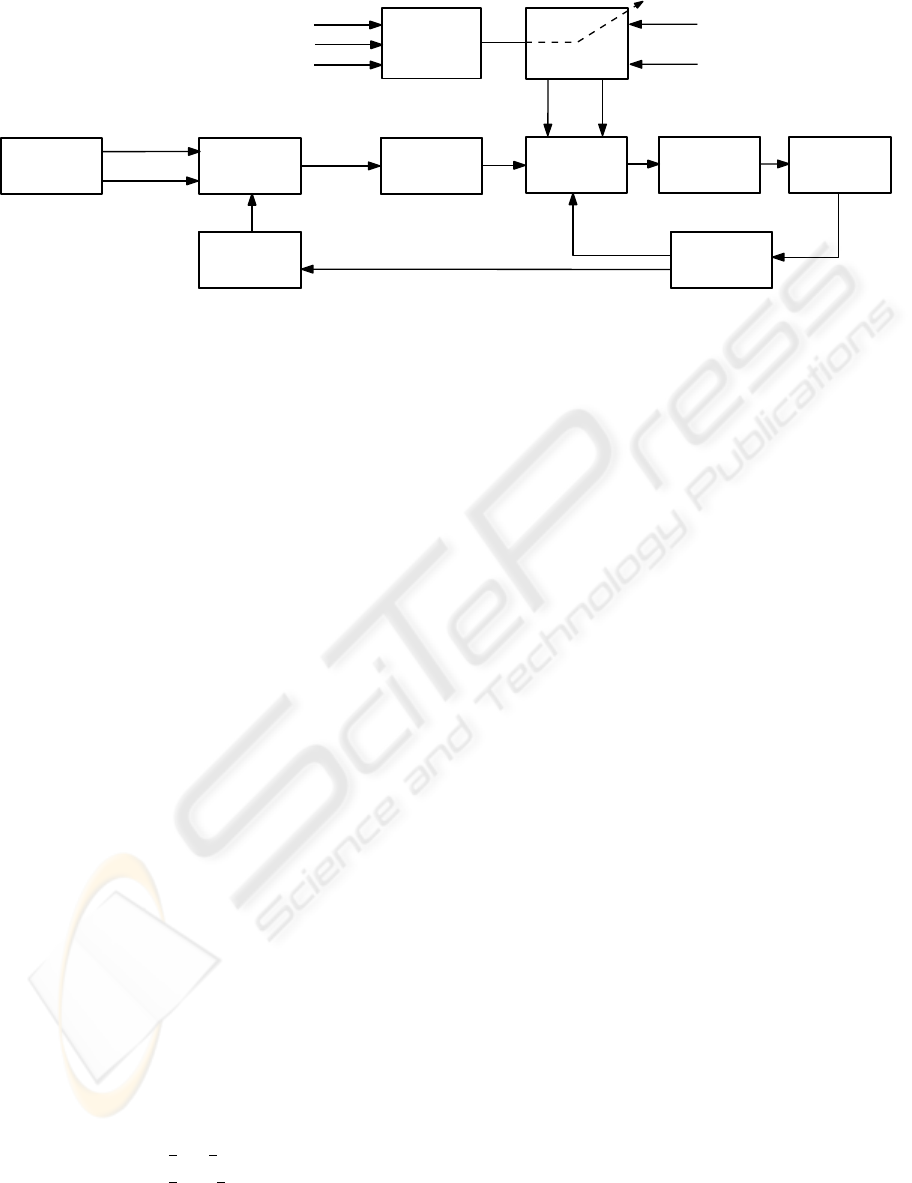
4.2 Control Design
The complete adaptive control system proposed in
this paper for the trajectory tracking of WMR is de-
picted in Figure 3. Some variables in this figure are
defined later in the following paragraphs. At this
point one should particularly note the cascade ap-
proach which divides the control problem in two main
tasks namely, kinematic control and dynamic control.
The kinematic controller ensures that the robot tracks
a reference trajectory, which can be generated in real-
time (one time-step ahead) by a path-planning algo-
rithm. To achieve this the kinematic controller issues
a velocity command that serves as the reference signal
for the adaptive dynamic controller. The latter com-
putes a control torque by employing the estimated dy-
namic functions, obtained from the ANN stochastic
estimator, in order to ensure that the robot velocity
ICINCO 2006 - ROBOTICS AND AUTOMATION
408
Trajectory
generator
Velocity
converter
WMR
Dynamic
controller
Sample
& hold
1
st
order
hold
Kinematic
controller
v
r
k+1
ω
r
k+1
p
r
k+1
p
k+1
v
c
k+1
ω
c
k+1
ν
c
k+1
τ
k
Zero order
hold
τ
q
p
k
ν
k
ˆ
f
k
ˆ
G
k
ˆw
k+1
Stochastic
weight
tuner
ANN
function
estimator
τ
k−1
ν
k−1
ν
k
ν
k−1
ν
k
Figure 3: Complete adaptive scheme.
vector really tracks the velocity desired by the kine-
matic controller. These two sub-controllers are de-
tailed next.
A very simple, yet useful representation of the tra-
jectory tracking problem, is through the concept of
the virtual vehicle (Crowley, 1989). Basically, the
time dependent trajectory to be tracked by the WMR
is designated by a non-stationary virtual vehicle hav-
ing the same nonholonomic constraints as the real
robot. The controller aims for the real vehicle to
track the virtual vehicle at all times, in both posture
and velocity. The discrete-time tracking error vector
e
k
= [e
1
k
e
2
k
e
3
k
]
T
is defined as:
e
k
,
cos φ
k
sin φ
k
0
− sin φ
k
cos φ
k
0
0 0 1
(p
r
k
− p
k
) , (29)
where p
r
k
= [x
r
k
y
r
k
φ
r
k
]
T
denotes the virtual ve-
hicle sampled pose vector. In trajectory tracking the
aim is to make e converge to zero so that p converges
to p
r
. For this task we propose a discrete-time version
of the continuous-time kinematic controller originally
presented in (Kanayama et al., 1990) given by:
ν
c
k
=
v
r
k
cos e
3
k
+ k
1
e
1
k
ω
r
k
+ k
2
v
r
k
e
2
k
+ k
3
v
r
k
sin e
3
k
, (30)
where ν
c
k
is the wheel velocity command vector re-
quested by the kinematic controller, (k
1
, k
2
, k
3
) > 0
are design parameters, and v
r
k
, ω
r
k
are the transla-
tional and angular velocities respectively correspond-
ing to the virtual vehicle. The latter are directly re-
lated to the virtual vehicle wheel velocity vector ν
r
k
as follows
ν
r
k
=
1
r
b
r
1
r
−
b
r
v
r
k
ω
r
k
. (31)
If we ignore the dynamic effects and consider only
the kinematic model (4) of the WMR and assume
perfect velocity tracking, then (30) completely solves
the trajectory tracking problem. However if a dy-
namic controller is to be implemented and assuming
no uncertainty in f
k
and G, one can use the following
dynamic control law to ensure that the WMR velocity
vector ν
k
really tracks ν
c
k
τ
k
= f
k
+ G
k
ν
c
k+1
− ν
k
+ k
d
{ν
c
k
− ν
k
}
, (32)
where −1 < k
d
< 1 is a design parameter. Note that
the control law requires the velocity command vec-
tor ν
c
to be known one sampling interval ahead. For
this reason we advance the kinematic control stage by
one sampling interval. This is achieved by: gener-
ating the reference trajectory vectors corresponding
to the (k + 1) instant, and using a first order hold to
estimate p
k+1
from p
k
. The latter is a valid approx-
imation since any decent sampling rate (in the order
of milli seconds) is still high enough compared to the
relatively slow dynamics of a mobile robot. Substitut-
ing this control law in the stochastic dynamic model
in (10) yields the following closed loop dynamics:
ν
k+1
= ν
c
k+1
+ k
d
(ν
c
k
− ν
k
) − ǫ
k+1
. (33)
Equation (33) clearly indicates that |ν
c
k
− ν
k
| → ǫ
k
as k → ∞. It is interesting to note that the case with
k
d
= 0, corresponds to the deadbeat control con-
cept associated with digital control systems. When
the dynamics are completely unknown and/or prone
to change, we propose to replace the control law (32)
with its heuristic certainty equivalent, utilising the es-
timates
ˆ
f
k
and
ˆ
G
k
from the ANN, leading to the
adaptive control law:
τ
k
=
ˆ
f
k
+
ˆ
G
k
ν
c
k+1
− ν
k
+ k
d
{ν
c
k
− ν
k
}
. (34)
NEURO-ADAPTIVE DYNAMIC CONTROL FOR TRAJECTORY TRACKING OF MOBILE ROBOTS
409
0 60 120 180
0
0.1
0.2
0.3
0.4
(a)
k p
r
− p k
−3 −2 −1 0 1 2 3
−4
−2
0
2
4
(b)
x (m)
y (m)
0 60 120 180
−20
0
20
40
(c)
Torque vector (Nm)
0 60 120 180
−10
0
10
20
30
(e)
Innovations vector i
k
time (s)
0 60 120 180
−1
0
1
2
(d)
v (m/s) & ω (rad/s)
0 60 120 180
60
70
80
90
100
(f )
time (s)
Diagonal mean of P
k
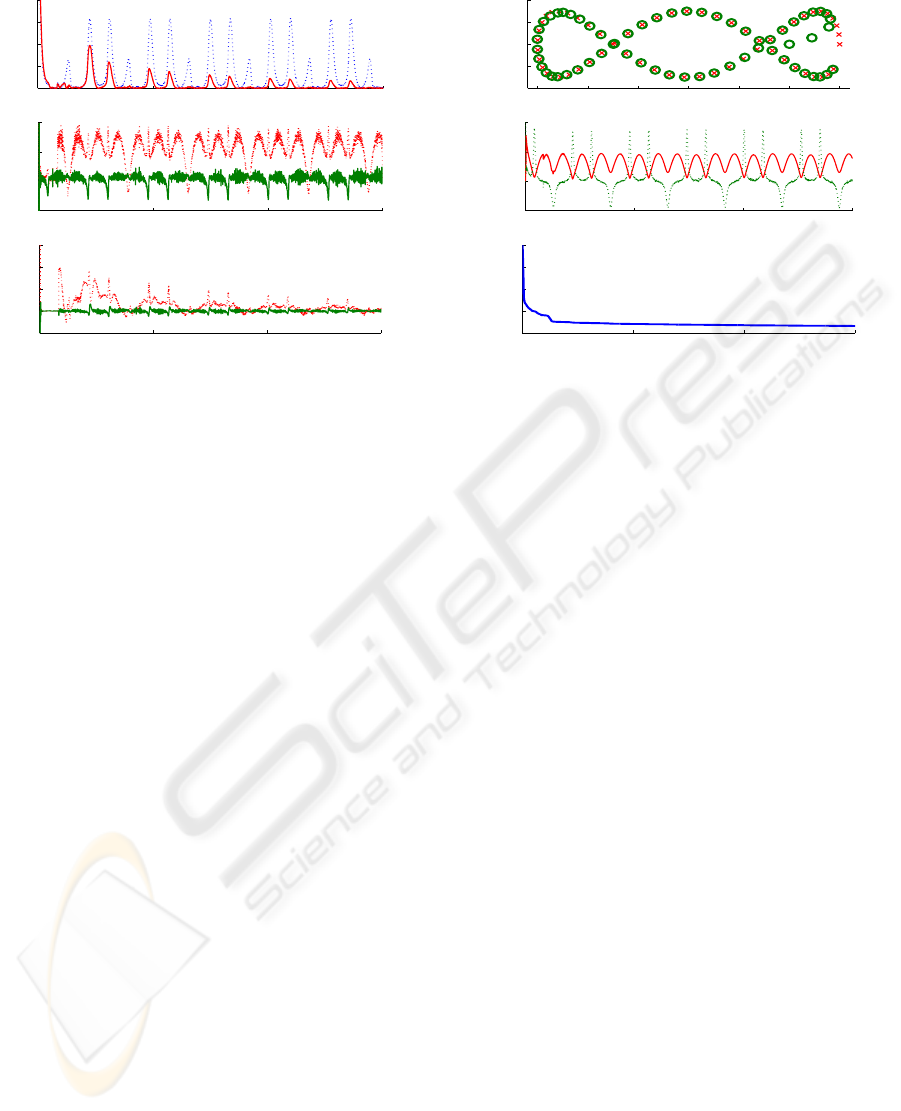
Figure 4: (a): adaptive (solid) & nonadaptive (dashed); (b): reference (×) & actual (◦) trajectories (first 60 seconds); (c): right
wheel (dashed) & left wheel (solid) torques; (d): linear (solid) & angular (dashed) velocities; (e): innovations vector i
k
; (f):
diagonal mean of P
k
. Plots (b) to (f) correspond to the proposed adaptive controller.
5 SIMULATION RESULTS
The proposed neuro-adaptive dynamic controller
(34) was verified and compared to its non-
adaptive version (32) by highly realistic simula-
tions. The mobile robot was simulated through
the continuous-time, full kinematic/dynamic model
given in (4) and (6) with the following parame-
ters: b=0.5m, r=0.15m, d=0.2m, m
c
=30kg, m
w
=1kg,
I
c
=15.625kgm
2
, I
w
=0.005kgm
2
, I
m
=0.0025kgm
2
.
We included viscous friction by setting F ( ˙q) = F
c
˙q
in (7), where F
c
is a diagonal matrix of coefficients
whose diagonal was set to [2, 2, 5, 0.5, 0.5]. Sampling
interval T = 50ms and the sampled data was cor-
rupted with noise ǫ
k
. To make the simulations more
realistic we imposed hard limits on the wheel torques
(±50Nm) to simulate actuator saturation. Neural net-
work pre-training is not used and to demonstrate fur-
ther the adaptive feature of the proposed controller,
the model used for simulations is abruptly modified
at t = 10s by introducing an additional load of 15kg
placed 0.4m away from P
o
. Moreover, at the same in-
stant we simulate a fault in the right wheel by increas-
ing its viscous friction coefficient by a factor of ten.
The reference trajectory used for simulations is very
demanding since it is characterised by high velocities
and accelerations. The neural network contained 49
RBFs with covariance matrix R
f
= 100I
2
, where I
i
denotes an (i × i) identity matrix. The Kalman filter
initial covariance P
0
= 100I
α
, where α is the total
number of weights. The initial weight vector ˆw
0
was
generated from a normal distribution with zero mean.
It took a standard desktop computer with no code op-
timisation merely 1 minute to simulate 3 minutes of
real-time. Clearly, this indicates that the proposed al-
gorithm is not computationally demanding.
A number of results for this particular simulation
are presented in Figure 4. Plot (a) shows clearly the
difference in performance between the adaptive and
nonadaptive controllers. In both cases the Euclid-
ian vector norm of the pose error diminishes quickly
from some non-zero initial value. However from
t = 10s onwards, corresponding to the aforemen-
tioned model disruption, the adaptive controller reacts
to the change and after a transitional period manages
to reduce the pose error vector back to normal; the
ANN has adapted to the new dynamic functions. As
expected this does not happen in the nonadaptive case
and the pose error remains relatively higher ∀t > 10s.
The actual trajectory in the x y plane is superimposed
on the reference trajectory in plot (b), which also ver-
ifies the good tracking performance of the proposed
scheme. Plot (c) depicts the wheel torque vector τ
and in (d) one should particularly note the high val-
ues of the translational v and angular ω velocities of
the WMR. Plot (e) shows how the Kalman innovation
vector abruptly increases at 10s due to the model dis-
ruption and diminishes back with time as the ANN
weights adapt to the new situation. Plot (f) depicts the
mean of the diagonal of the covariance matrix P
k
in
time. The latter provides a measure of the uncertainty
in the estimated weights, as generated recursively by
the Kalman filter. As expected, the uncertainty de-
creases with time, indicating that the Kalman filter is
stable and the neural network estimations are contin-
uously improving. The slope of this curve is related
to the learning rate of the ANN adaptive scheme.
ICINCO 2006 - ROBOTICS AND AUTOMATION
410

6 CONCLUSIONS
In this paper an ANN functional-adaptive dynamic
control scheme for the trajectory tracking problem of
mobile robots is proposed. The resulting algorithm
requires no preliminary information about the nonlin-
ear functions in the dynamics and uses a RBF neural
network, trained online in consideration of noise, un-
certainty and disturbances by using a Kalman filter.
The designed scheme was tested successfully by real-
istic simulations for several noise conditions and pa-
rameter variations. The adaptive controller showed
improved performance when compared to the non-
adaptive case in the face of parameter uncertainty. Fu-
ture research will investigate the use of parameter re-
setting in the estimator and the development of dual
stochastic nonlinear control laws (Fabri and Kadirka-
manathan, 2001) which would take into account the
inaccuracy of the ANN approximations, giving rise to
better transient performance. We anticipate to get sat-
isfactory experimental results once the proposed al-
gorithm is implemented on a real mobile robot in the
near future.
REFERENCES
Brockett, R. W. (1983). Asymptotic Stability and Feedback
Stabilisation. Differential Geometric Control Theory.
Birkh
¨
auser, Boston, MA.
Bugeja, M. K. and Fabri, S. G. (2005). Multilayer percep-
tron functional adaptive control for trajectory track-
ing of wheeled mobile robots. In Proc. 2nd Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics (ICINCO2005), volume 3, pages
66–72, Barcelona, Spain.
Canudas de Wit, C., Khennoul, H., Samson, C., and Sor-
dalen, O. J. (1993). Nonlinear control design for mo-
bile robots. In Zheng, Y. F., editor, Recent Trends
in Mobile Robots, Robotics and Automated Systems,
chapter 5, pages 121–156. World Scientific.
Corradini, M. L., Ippoliti, G., and Longhi, S. (2003). Neural
networks based control of mobile robots: Develop-
ment and experimental validation. Journal of Robotic
Systems, 20(10):587–600.
Corradini, M. L. and Orlando, G. (2001). Robust tracking
control of mobile robots in the presence of uncertain-
ties in the dynamic model. Journal of Robotic Sys-
tems, 18(6):317–323.
Crowley, J. L. (1989). Asynchronous control of orienta-
tion and displacement in a robot vehicle. In Proc. of
the 1989 IEEE International Conference on Robotics
and Automation (Vol. 3), pages 1277–1282, Scotts-
dale, AZ.
de Sousa, C., Hemerly, E. M., and Galvao, R. K. H. (2002).
Adaptive control for mobile robot using wavelet net-
works. IEEE Transactions on Systems, Man and Cy-
bernetics, 32(4):493–504.
Ding, D. and Cooper, R. A. (2005). Electric-powered
wheelchairs. IEEE Control Systems Magazine,
25(2):22–34.
Fabri, S. G. and Kadirkamanathan, V. (1998). Dual adaptive
control of nonlinear stochastic systems using neural
networks. Automatica, 34(2):245–253.
Fabri, S. G. and Kadirkamanathan, V. (2001). Functional
Adaptive Control: An Intelligent Systems Approach.
Springer-Verlag, London, UK.
Fierro, R. and Lewis, F. L. (1995). Control of a nonholo-
nomic mobile robot: Backstepping kinematics into
dynamics. In Proc. IEEE 34th Conference on Deci-
sion and Control (CDC’95), pages 3805–3810, New
Orleans, LA.
Fierro, R. and Lewis, F. L. (1998). Control of a non-
holonomic mobile robot using neural networks. IEEE
Trans. Neural Networks, 9(4):589–600.
Fukao, T., Nakagawa, H., and Adachi, N. (2000). Adap-
tive tracking control of a nonholonomic mobile ro-
bot. IEEE Transactions on Robotics and Automation,
16(5):609–615.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Trans. ASME J. Basic Eng.,
82:34–45.
Kanayama, Y., Kimura, Y., Miyazaki, F., and Noguchi, T.
(1990). A stable tracking control method for an au-
tonomous mobile robot. In Proc. IEEE International
Conference of Robotics and Automation, pages 384–
389, Cincinnati, OH.
Kolmanovsky, I. and McClamroch, N. H. (1995). Develop-
ments in nonholonomic control problems. IEEE Con-
trol Systems Magazine, 15(6):20–36.
Lamiraux, F., Laumond, J. P., VanGeem, C., Boutonnet,
D., and Raust, G. (2005). Trailer truck trajectory op-
timization: the transportation of components for the
Airbus A380. IEEE Robotics and Automation Maga-
zine, 12(1):14–21.
Maybeck, P. S. (1979). Stochastic Models, Estimation and
Control, volume 141-1 of Mathematics in Science and
Engineering. Academic Press Inc., London, UK.
Oubbati, M., Schanz, M., and Levi, P. (2005). Kinematic
and dynamic adaptive control of a nonholonomic mo-
bile robot using RNN. In Proc. IEEE Symposium on
Computational Intelligence in Robotics and Automa-
tion (CIRA’05), Helsinki, Finland.
Poggio, T. and Girosi, F. (1990). Networks for approxima-
tion and learning. Proc. IEEE, 78(9):1481–1497.
Sarkar, N., Yun, X., and Kumar, V. (1994). Control of
mechanical systems with rolling constraints: Appli-
cations to dynamic control of mobile robots. Interna-
tional Journal of Robotics Research, 13(1):55–69.
van de Water, H. and Willems, J. C. (1981). The cer-
tainty equivalence property in stochastic control the-
ory. IEEE Transactions on Automatic Control, AC-
26(5):1080–1087.
NEURO-ADAPTIVE DYNAMIC CONTROL FOR TRAJECTORY TRACKING OF MOBILE ROBOTS
411
