
COMBINING REINFORCEMENT LEARNING AND GENETIC
ALGORITHMS TO LEARN BEHAVIOURS IN MOBILE ROBOTICS
R. Iglesias
1
, M. Rodr
´
ıguez
1
, C.V. Regueiro
2
, J. Correa
1
and S. Barro
1
1
Electronics and Computer Science, University of Santiago de Compostela, Spain.
2
Dept. of Electronic and Systems, University of Coru˜na, Spain.
Keywords:
Robot Control, mobile robotics, autonomous agents, reinforcement learning, genetic algorithms.
Abstract:
Reinforcement learning is an extremely useful paradigm which is able to solve problems in those domains
where it is difficult to get a set of examples of how the system should work. Nevertheless, there are important
problems associated with this paradigm which make the learning process more unstable and its convergence
slower. In our case, to overcome one of the main problems (exploration versus exploitation trade off), we
propose a combination of reinforcement learning with genetic algorithms, where both paradigms influence
each other in such a way that the drawbacks of each paradigm are balanced with the benefits of the other.
The application of our proposal to solve a problem in mobile robotics shows its usefulness and high perfor-
mance, as it is able to find a stable solution in a short period of time. The usefulness of our approach is
highlighted through the application of the system learnt through our proposal to control the real robot.
1 INTRODUCTION
Currently, there are three major learning paradigms in
artificial intelligence: supervised learning, unsuper-
vised learning, and reinforcement learning. By means
of reinforcement learning (RL), a system operating
in an environment learns how to perform a task in
that environment starting from a feedback called re-
inforcement which tells the system how good or bad
it has performed, but nothing about the desired re-
sponses. This is extremely useful in many domains,
such as mobile robotics, where it is quite difficult or
even impossible to tell the system which action or de-
cision is the suitable one for every situation the system
might face.
To determine the desired behaviour the system
should attain after the learning procedure, it is just
necessary to define appropriately the reinforcement
function.
There are, however, certain difficulties associated
with the reinforcement learning methods. It is pos-
sible to mention, for example, the problems arising
from the fact that RL assumes that the environment as
perceived by the system is a Markov Decision Process
(MDP), which implies that the system only needs to
know the current state of the process in order to deter-
mine the suitable action to be carried out or to predict
its future behaviour. However, in many real situations
this is not hold.
During the learning process the action the system
should take at every state is determined. The set of
actions which solve the task maximizing the amount
of positive reinforcement the system receives is called
optimal policy. Usually RL demonstrates a slow con-
vergence to the optimal policy. Moreover, during the
search of this optimal policy the system encounters
a new and very important problem, brought about by
the fact that during the learning process new actions
for each of the possible states must be explored, in
order to verify which is the best action to take. Never-
theless, with the aim of maximising the reinforcement
received, the system would prefer to execute those ac-
tions that it has tried in the past and has found to be
effective in producing reward. As a consequence, the
system has to exploit what it already knows in order
to obtain a reward, but it also has to explore what it
does not know in order to make a better action selec-
tion in the future. This is what is called exploration
versus exploitation trade off.
The exploration versus exploitation trade off is one
of the main drawbacks of the reinforcement learning
paradigm, and it is also the main issue in this arti-
cle. The main disadvantages derived from this prob-
lem are, on one hand, the convergence time: the time
188
Iglesias R., Rodríguez M., V. Regueiro C., Correa J. and Barro S. (2006).
COMBINING REINFORCEMENT LEARNING AND GENETIC ALGORITHMS TO LEARN BEHAVIOURS IN MOBILE ROBOTICS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 188-195
DOI: 10.5220/0001209501880195
Copyright
c
SciTePress

needed to learn a good policy increases exponentially
with the number of states the system might encounter
and the number of actions that it is possible to execute
in each one of them. On the other hand, the system
wastes too much time trying actions that are clearly
inappropriate for the task, but are selected randomly
in the exploration phase.
Exploration can be costly and impossible to carry
out in real systems where the execution of wrong ac-
tions might cause physical damage in the hardware.
Most of the work being done to speed up the learn-
ing process can be classified in one of two different
research options: a) The basic RL algorithms are be-
ing improved to increase the influence (in time) of the
wrong actions: if the system does something wrong
there is a high probability that the next time the sys-
tem visits the same or a similar sequence of states, it
tries something new. b) Some other mechanisms are
being developed to allow the injection of knowledge
or advice in the system.
In the work we describe in this paper, there is no
knowledge or advice injection in the learning phase.
We speed up the learning procedure through the com-
bination of RL and genetic algorithms. Our aim is
to propose a mechanism where the exploration is fo-
cused thus decreasing the learning time, and increas-
ing the stability of the learning process.
The structure of the article is divided in the follow-
ing sections: First, we will describe briefly the basic
principles of reinforcement learning (section 2). The
basic aspects of genetic algorithms and how they are
combined with reinforcement learning is described in
section 3. Section 4 presents the application of the
proposal described in this article to solve a problem
in the mobile robotics domain. Finally, the conclu-
sion and future research are summarized in section 5.
2 REINFORCEMENT LEARNING
ALGORITHMS
This section includes some basic aspects regarding re-
inforcement learning (RL), and more specifically on
one of its algorithms, known as truncated temporal
differences TTD(λ, m) (Cichosz, 1997).
We will assume that a system interacts with the en-
vironment at discrete time steps. The environment
must be at least partially observable by the system, in
such a way that it is able to translate the different situ-
ations that it may detect into a finite number of states,
S. At each step, the system observes the current state,
s(t) ∈ S, and performs an action a(t) ∈ A, where A
is the finite set of all possible actions. The immediate
effect of the execution of an action is a state transi-
tion, and scalar reinforcement value, which tells the
system how good or badly it has performed.
TTD(λ, m) algorithm learns a utility function of
states and actions called the Q-function. Thus, for
the current state s
t
, Q
π
(s
t
, a) is the total discounted
reinforcement that will be received starting from state
s
t
, executing action a, and then following policy π,
(where a policy is a function that associates a particu-
lar action a ∈ A for each state s ∈ S ).
Q
π
(s
t
, a) =
∞
X
k=0
γ
k
r
t+k
, γ ≤ 1
In order to learn this utility function, the system
starts with a randomly chosen set of negative values
Q(s, a), ∀s, a and then initiates a stocastical explo-
ration of its environment. As the system explores, it
continually makes predictions about the reward it ex-
pects, and then it updates its utility function by com-
paring the reward it actually receives with its predic-
tion. Thus, the TTD(λ, m) algorithm could be sum-
marized through the following steps:
At each instant, t:
1. Observe the current state, s(t): s[0] = s(t).
2. Select an action a(t) for s(t): a[0] = a(t).
3. Perform action a(t), observe new state s(t+1) and
reinforcement value r(t).
4. r[0] = r(t), u[0] = max
a
Q
t
(s(t + 1), a)
5. for k = 0, 1, . . . , m − 1 do:
• if k = 0 then z = r[k] + γu[k]
• else z = r[k] + γ(λz + (1 − λ)u[k]), where
0 < γ, λ ≤ 1.
6. Update the Q-values:
• ∆ = z − u[s[m − 1])
• Q
t+1
(s[m−1], a[m−1]) = Q
t
(s[m−1], a[m−
1]) + β∆
7. Shift the indexes of the experience buffer.
It is important to notice the system keeps track of
the ”m” most recent states. The consequences of ex-
ecuting action a at time t, are backpropagated m − 1
steps earlier.
The optimal policy which maximizes the amount
of reinforcement the system receives is called greedy
policy, π
∗
. This policy establishes that the action to
be carried out at every state, s ∈ S, is the one which
seems to be the best one according to the Q-values:
π
∗
(s) = argmax
a
Q(s, a)
The greedy policy determines the behaviour of the
system after the learning process.
2.1 Action Selection Mechanism
In order to determine the action to be executed at
every instant (step 2 in the T T D(λ, m) algorithm),
COMBINING REINFORCEMENT LEARNING AND GENETIC ALGORITHMS TO LEARN BEHAVIOURS IN
MOBILE ROBOTICS
189

there are many options. Basically all of them try to
keep a high exploration ratio at the beginning of the
learning procedure while, as time goes by, more and
more the selected actions are those which are consid-
ered the best (according to the Q-values).
A good example is the exploration based on the
Boltzman distribution. According to this strategy, the
probability of executing action a
∗
in state s(t), is
given by the following expression:
P rob(s(t), a
∗
) =
e
Q(s(t),a
∗
)/T
P
∀a
e
Q(s(t),a)/T
, (1)
where the value T > 0 is a temperature that controls
the randomness. Very low temperatures cause nearly
deterministic action selection, while high values re-
sult in random performances.
3 COMBINING GENETIC
ALGORITHMS WITH
REINFORCEMENT
LEARNING: GA+RL
A genetic algorithm (GA) is a biologically inspired
search technique very suitable to find approximate
solutions to optimization search problems (Davidor,
1991). This algorithm is based on the evolutionary
ideas of natural selection and genetic. In general ge-
netic algorithms are considered to be useful when the
search space is large, complex or poorly understood,
the domain knowledge is scarce or expert knowledge
is difficult to encode, and a mathematical analysis of
the problem is difficult to carry out.
To solve a search problem the GA begins with a
population of solutions (called chromosomes). Each
chromosome of this population is evaluated using
an objective function, called fitness function, which
measures how close is the chromosome to the desired
solution. A new population is then obtained from the
first one, according to the fitness values: the better a
chromosome seems to be, the higher the probability
that chromosome is selected for the new population
of solutions. To keep certain randomness in the al-
gorithm, which prevents it from being trapped in a lo-
cal minimum, the application of genetic operators like
chromosome mutation (random changes in the pro-
posed solution), or chromosome crossover (combina-
tion of two chromosomes to raise two new solutions),
is required when a new set of solutions is obtained
from a previous one.
The evaluation of the population of solutions, and
its evolution to a new and improved population, are
two steps which are repeated continuously until the
desired behaviour is reached.
In our case we wanted to combine the potential of
a GA with RL (figure 1), in such a way that the draw-
backs of each paradigm are balanced with the benefits
of the other.
3.1 How a GA Improves RL
Genetic algorithms help RL in generalization and se-
lectivity (David E. Moriarty, 1999). GA learns a map-
ping from observed states to recommended actions,
usually eliminating explicit information concerning
less desirable actions. In a GA the knowledge about
bad decisions is not explicitly preserved, since poli-
cies that make such decisions are not selected by the
evolutionary algorithm and are eventually eliminated
from the population. Thus, because the attention is
only focused on profitable actions and less informa-
tion has to be learnt, the system reaches globally good
solutions faster than RL.
As can be seen through figure 1, RL and GA share
the same finite number of states, S, which represent
the different situations the system may detect. Thus,
a chromosome and a policy are both the same, as a
chromosome also has to establish the action a ∈ A,
to be carried out at every state s ∈ S (this coincides
with the definition of policy given in section 2). Ac-
cording to figure 1, the fitness is a function of the re-
ward values. The longer a chromosome/policy is able
to control the system properly, the higher its fitness
value is.
When a set of N policies are being evaluated, if one
of them makes the system behave much better than
the others, there is a big probability that similar se-
quences of actions are explored through the next gen-
erated population of chromosomes. In RL, this is not
possible, as it would require a high learning coeffi-
cient and a fast decrease of the temperature coefficient
(towards the greedy policy). This high learning coef-
ficient would cause important instabilities during the
learning process, as the execution of correct actions
in the middle of wrong ones, would quickly decrease
their Q-values.
3.2 How RL Improves GA
As pointed out previously RL keeps more informa-
tion than GA. The Q-values reflect the consequences
of executing every possible action in each state. This
information might be useful to bias the genetic opera-
tors to reduce the number of chromosomes required to
find a solution. Thus, the mutation probability could
be higher for those policies and states where the se-
lected action is poor according to the Q-values, the
crossover between two policies could be in such a way
that the exchanged actions have similar Q-value, etc.
In our proposal, the first genetic operator which
saw its way of functioning changed was the mutation
ICINCO 2006 - ROBOTICS AND AUTOMATION
190
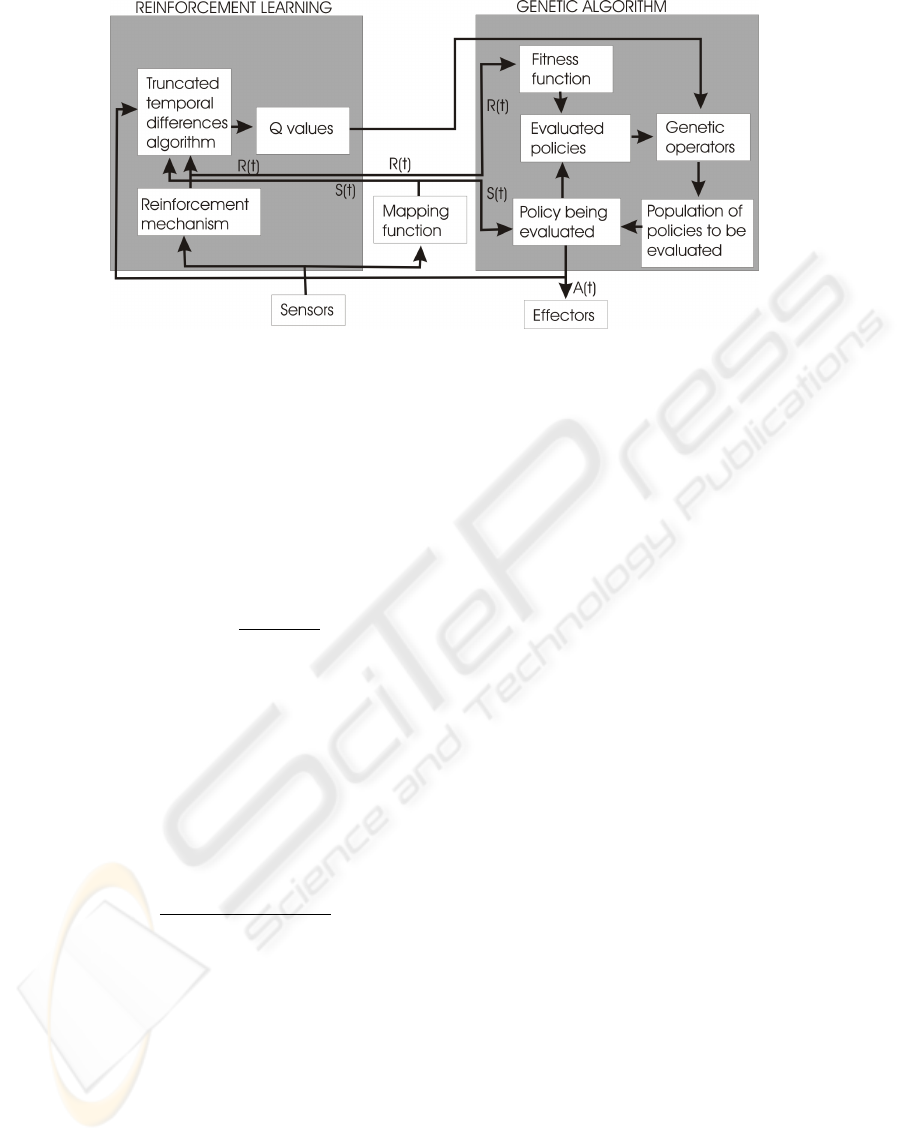
Figure 1: Representation of our proposal to combine GA with RL.
operator. For each chromosome, π, the probability
that mutation changes the action that it suggests for a
particular state, π(s), depends on how many actions
look better or worse -according to the Q-values- than
the one suggested by the chromosome:
N1 = cardinality{a
j
| Q(s, a
j
) ≥ Q(s, π(s))}
N2 = cardinality{a
k
| Q(s, a
k
) ≤ Q(s, π(s))}
P
mutation
(π(s)) =
N1
N1 + N2
N1 represents the number of actions that look bet-
ter than π(s), N2 the number of worse actions than
π(s). P
mutation
(π(s)) establishes the probability that
mutation changes the action suggested by policy π
in state s. Nevertheless, if mutation is going to be
carried out, there is a big uncertainty about which
other action, instead of π(s), should be selected. In
our case, instead of a random selection, there is a
probability of picking up every action, P
s
(s, a
i
), ∀a
i
,
which depends on the Q-values:
P
s
(s, a
i
) =
e
Q(s,π (s )) /Q(s,a
i
)
P
j
e
Q(s,π (s )) /Q(s,a
j
)
. (2)
Those actions whose Q-values are higher than the one
corresponding to the action currently proposed, have
a higher probability of being selected as new can-
didates than those other actions whose Q-values are
lower than the one corresponding to π(s).
To understand equation 2, it is important to bear in
mind that Q(s, a
i
) ≤ 0, ∀a
i
.
3.2.1 Non Episodic Tasks
An episodic task is one in which the agent-
environment interaction is divided into a sequence of
trials, or episodes. Each episode starts in the same
state, or in a state chosen from the same distribution,
and ends when the environment reaches a terminal
state. A continuous task is the opposite of an episodic
one, there is one episode that starts once and goes for-
ever. There are situations where a continuous task can
be also broken into different episodic subtasks.
When the task is continuous there might be prob-
lems evaluating and comparing different policies us-
ing Genetic Algorithms, as the starting position of the
system is not always the same. On the other hand,
in the case of a continuous task which is broken into
episodic subtasks, the population of policies might
evolve to solve a subtask, but once that subtask is
solved, the population might be useless for the next
subtask. Moreover, if the set of all possible environ-
mental states is the same for all the subtasks, it could
happen that the policies evolve to solve a subtask but
they forget how to solve all the previous ones.
To be able to work just with a population of chro-
mosomes, even when dealing with a continuous task,
one of the chromosomes of the population must al-
ways be the greedy policy obtained from the Q-
values. The reason is that the Q-values group together
all the experiences the system has gone through. In
this sense, the RL algorithm helps GA to have a fast
convergence to the desired solution.
3.2.2 Non-Stationary Environments
As it is described in (David E. Moriarty, 1999), when
the agent’s environment changes over time, the RL
problem becomes even more difficult, since the op-
timal policy becomes a moving target. To increase
the performance of a GA to rapidly changing environ-
ments, it would be necessary a higher mutation rate
(Cobb and Grefenstette, 1993), or keep a randomized
portion of the population of chromosomes (Grefen-
stette, 1992).
COMBINING REINFORCEMENT LEARNING AND GENETIC ALGORITHMS TO LEARN BEHAVIOURS IN
MOBILE ROBOTICS
191
3.3 Main Stages in the Learning
Process
When our GA+RL approach is used there are three
basic stages which are repeated cyclically during
the learning process: a) Evaluation: the chromo-
somes/policies are evaluated when the system starts
always from the same position in the environment.
During this stage the Q-values are updated. b) New
population generation: Using the genetic operators
biased with the Q-values, a new population of policies
is generated. c) Checking for a new starting position
or convergence: The greedy policy is used to control
the system. If it does something wrong, the position
of the system several steps before the failure is estab-
lished as a new starting position for the next evalu-
ation stage. If the greedy policy is able to properly
control the system for a significant interval of time,
convergence is detected and the learning procedure is
stopped.
4 APPLICATION OF GA-RL TO
MOBILE ROBOTICS
We applied both, the reinforcement learning algo-
rithm T T D(λ, m) and the GA+RL mechanism, to
learn robot controllers which are able to solve a com-
mon task in mobile robots: ”wall following”. The
controllers must determine the commands the robot
should carry out to follow a wall located on its right
and at certain distance interval, using only the in-
formation provided by the right side sensors. Our
aim here is not to achieve the best wall following
behaviour, but to show how our proposal is able to
solve the problem applying a learning process which
is faster that the one corresponding to RL.
The robot we used is a Nomad200 robot equipped
with 16 ultrasound sensors encircling its upper part,
16 infrared sensors, laser and bumpers.
The finite set of states through which the environ-
ment around the robot is identified is the same regard-
less of the learning paradigm we used. Because of
this, we’ll describe first how we obtained this state
representation, and then we’ll describe the results ob-
tained when T T D(λ, m) and GA+RL were used.
4.1 Representation of the
Information: Obtaining the State
of the Environment
To translate the large number of different situations
that the ultrasound sensors may detect into a finite
and reduced set of environmental identification states,
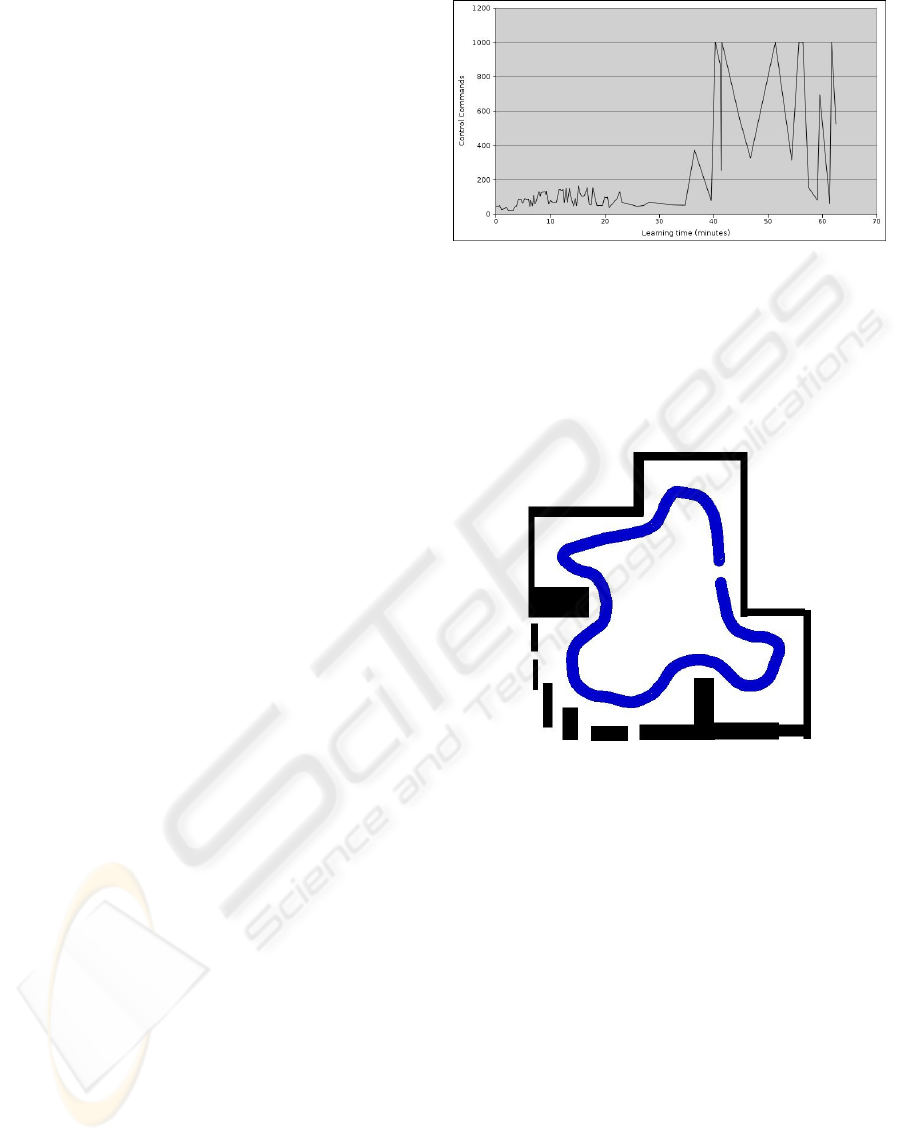
Figure 2: Maxim um number of commands that the greedy
policies, saved during the learning stage, are able to send to
the robot before it does something wrong in either of the
two environments: the training or the testing one. 1000
commands is the maximum number of commands any pol-
icy can send to the robot before being considered as correct
and its evaluation finished. T T D(λ, m) was applied.
Figure 3: Robot’s trajectory in the training environment.
40 minutes and 20 seconds were necessary to learn the
control policy which determines the robot’s movement.
T T D(λ, m) was used.
a set of layered Kohonen networks was used (R. Igle-
sias and Barro, 1998a). In the first layer we have em-
ployed 5 one dimensional Kohonen networks with 15
neurones each. The inputs of each one-dimensional
network are the readings from three adjacent sensors.
The output of these networks is a five component vec-
tor which codifies and abstracts the environment visi-
ble through the robot’s right ultrasound sensors. Nev-
ertheless, it is clearly not viable to associate each one
of these vectors to a state, as this would mean han-
dling with 15
15
states. The necessary reduction in the
number of final states has been achieved by means
of a hexagonal bidimensional Kohonen network of
22 × 10 neurones. Thus, at every instant, the envi-
ronment surrounding the robot is identified through
one of these 220 neurones.
ICINCO 2006 - ROBOTICS AND AUTOMATION
192
4.2 Application of the Reinforcement
Learning Algorithm, T T D(λ, m),
to Learn the Robot Controller
We first learnt the robot controller using the
T T D(λ, m) learning algorithm described in section
2. The linear velocity of the robot is kept constant
in all the experiments (15.24 cm/s). To determine
the most suitable values of the learning parameters
we analysed the time required to learn the task when
they were changed. In particular we tried with β =
{0.25, 0.35, 0.45, 0.55}, λ = {0.4, 0.5, 0.60.7, 0.8},
and m = {10, 20, 30, 40, 50}. The best combina-
tion of parameters we found is β = 0.35, λ = 0.8,
γ = 0.95 and m = 30. The reinforcement learning
function penalizes those situations where the robot
is too close or too far from the wall being followed
(r = −2), being r = 0 otherwise.
Finally, to determine the action the robot should
carry out at every instant, t, an exploration strategy
based on the Bolztman distribution was used (equa-
tion 1). According to this strategy, the probability of
selecting action a, in the current state s(t), depends
on the Q-value, Q(s(t), a), and a decreasing temper-
ature T > 0. In our case, as there is a significant
difference in the relative frequency of the 220 possi-
ble states, we worked with a temperature value which
is independent for each of them: T (s). Each time the
robot is faced with a particular state s(t) , the tem-
perature of this state s(t) is reduced with a constant
ratio:
T
t+1
(s(t)) = 0.999T (s(t))
The decreasing ratio of the temperature has been se-
lected in such a way that after 9206 times visiting the
same state, there is a high probability that the action
selected to execute in that state is always the best one
according to the Q-values.
Finally, because we want to compare the movement
of the robot when different controllers are used, the
robot receives a command with the action to be car-
ried out every 300 ms.
In order to learn the task, the behaviour of the robot
was simulated in a training environment, and tested
in a different one, figures 3 and 4. The greedy poli-
cies at different instants of time were saved during
the learning process, with the purpose of evaluating
each one of them afterwards, figure 2. In particu-
lar it is determined how many commands each policy
is able to send to the robot before it does something
wrong whereas if the robot doesn’t fail at all during
1000 commands (5 minutes of movement), the policy
is taken as correct and its evaluation is then finished.
According to figure 2, around 42 minutes are
roughly enough to learn the desired task. The problem
is that as we can see in the graph, the convergence is
not very stable –the greedy policy learnt by the robot
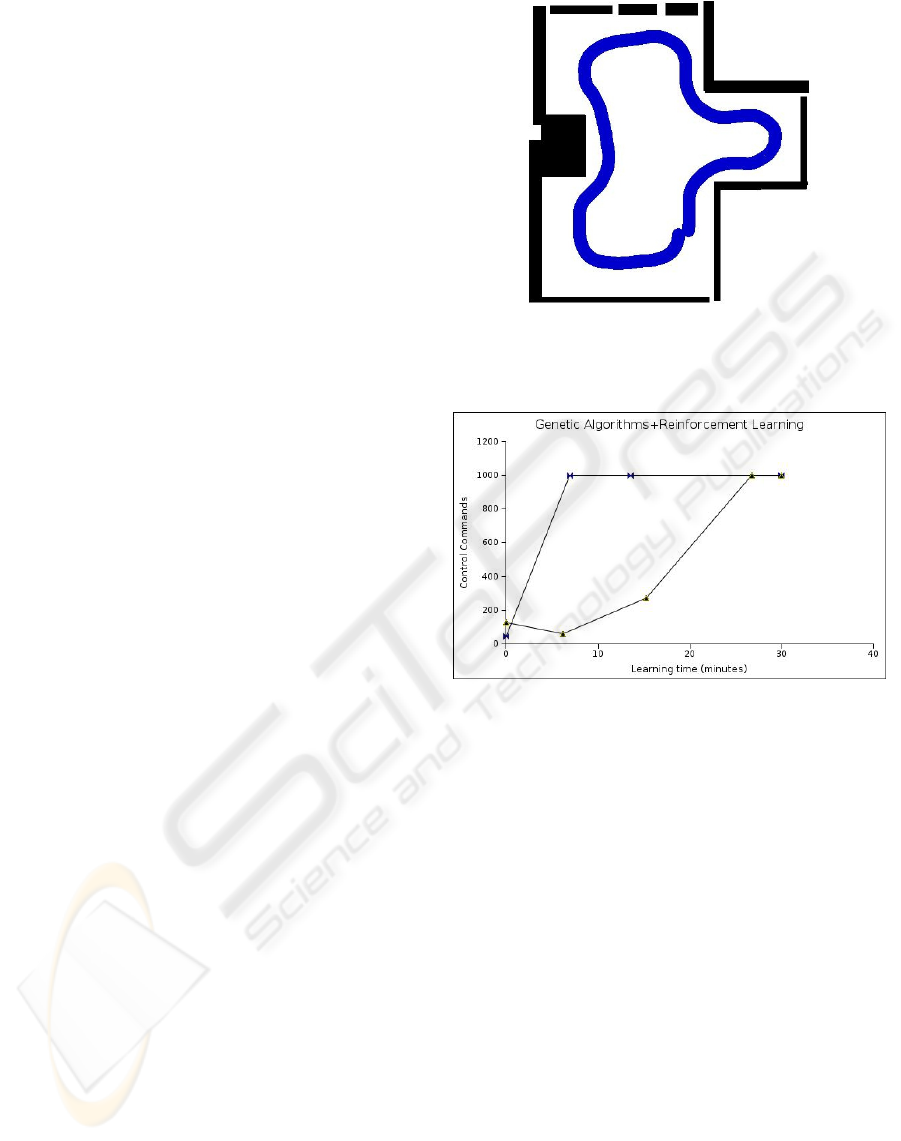
Figure 4: Robot’s trajectory in the testing environment
when the same control policy as the one applied in figure
3 is used.
Figure 5: Maxim um number of commands that the greedy
policies saved during two different learning processes are
able to send to the robot. After 1000 commands the policy
is considered correct and its evaluation finished. GA+RL
was applied.
after convergence is occasionally wrong–. As we can
see in the trajectory shown in figure 4, the controller is
able to solve the task, although there are parts where
the robot is too far from the wall being followed.
The best values we found for the parameters
present in the RL algorithm have been used in all the
experiments we carried out (using RL or GA+RL).
4.3 Application of GA+RL to Learn
the Robot Controller
Our GA+RL proposal has proved to be much faster
than the T T D(λ, m) algorithm (figure 5). We re-
peated the experiment 4 times and the average time
required to learn the behaviour was 24.27 minutes.
There are 20 policies (chromosomes) being evaluated
and evolved, 6 of them are random policies (to face
with non-static environments and keep a suitable ratio
COMBINING REINFORCEMENT LEARNING AND GENETIC ALGORITHMS TO LEARN BEHAVIOURS IN
MOBILE ROBOTICS
193
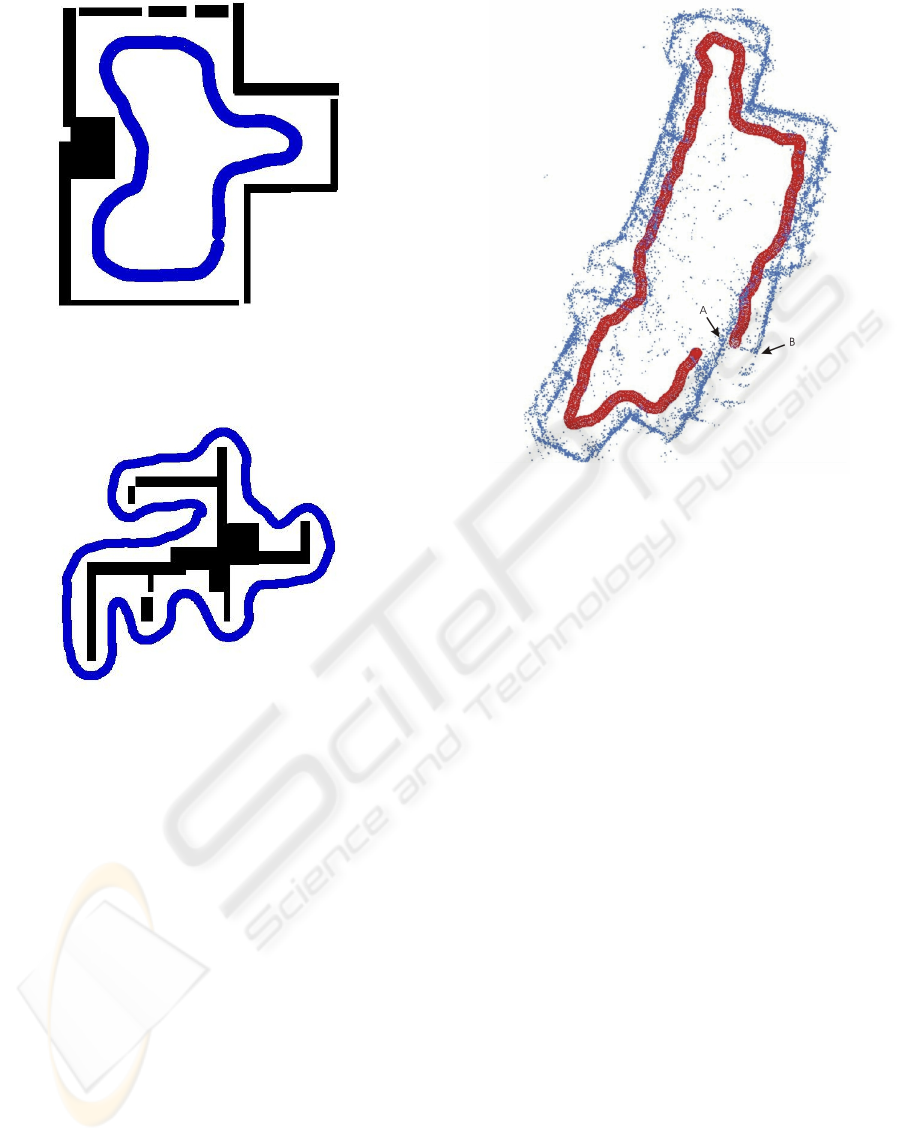
Figure 6: Robot’s trajectory in the testing environment
when a control policy which has been learnt in 27 minutes
and 45 seconds is used. GA+RL was applied.
Figure 7: Robot’s trajectory in a new and complex envi-
ronment using a control policy learnt through the use of
GA+RL.
of exploration), and one of the remaining ones is the
greedy policy (because this is a non-episodic task).
Through the experiments we carried out, we have no-
ticed that increasing the total number of policies being
evaluated doesn’t help to have a faster convergence.
We also could see that the most suitable number of
random policies is 30% of the whole population.
Regarding the three basic stages described in sec-
tion 3.3 that are repeated cyclically: a) Evaluation,
b) New population generation, and c) Checking for a
new starting position or convergence, it is necessary
to specify here that in the third stage the greedy pol-
icy is used to control the robot. If it does something
wrong, the position of the robot several steps before
the failure is established as a new starting position for
the next evaluation stage. If the greedy policy is able
to properly control the movement of the robot for an
interval of 15 minutes, convergence is detected and
the learning procedure is stopped.
Through figures 6 and 7, we can see how GA+RL
Figure 8: Real robot’s trajectory in a noisy and real envi-
ronment when the same control policy as the one showed in
figure 7 is used to control the robot’s movement. Points A
and B in the graph are the same, the misalignment is due to
the odometry error. The small dots in the graph correspond
to the ultrasound readings.
can be used to learn controllers which are able to
move the robot in two very different and complex en-
vironments. Moreover, to prove that the behaviours
learnt with the GA+RL proposal are useful, figure 8
shows the movement of the real robot in a real and
noisy environment when one of the greedy policies
learnt with GA+RL is used to control it.
In this article we also claim that through the combi-
nation of GA and RL the stability of the learning pro-
cess is increased. Figure 9 confirms this, as it shows
how the number of negative reinforcements received
during the learning stage is lower with GA+RL (1444)
than with T T D(λ, m) (4799).
5 CONCLUSIONS AND FUTURE
WORK
Reinforcement learning is an extremely useful
paradigm where the specification of the restrictions
of the aimed behaviour of the system is enough to
start a random search of the desired solution. Nev-
ertheless, a successful application of this paradigm
requires a good exploration strategy, suitable to find
a good solution without a deep search through all the
possible combinations of actions, which might desta-
ICINCO 2006 - ROBOTICS AND AUTOMATION
194

Figure 9: Number of negative reinforcements received dur-
ing the learning stage when different strategies are used.
bilize the system and increase enormously the conver-
gence time.
In our case, we proposed the combination of ge-
netic algorithms and reinforcement learning, in such
a way that the mutual influence of both paradigms
strength their potential and correct their drawbacks.
Through our proposal, the exploration strategy is im-
proved and the time required to find the pursuit solu-
tion is reduced drastically.
Our first experimental results after the application
of our proposal to solve a particular problem in mo-
bile robotics, confirm that there are situations where
our approach is viable and its performance really
high. The changes necessary to carry out in order to
join our proposal with a dynamic generation of the
states which identify the environment around the sys-
tem (R. Iglesias and Barro, ), or the injection of prior
knowledge of the task (R. Iglesias and Barro, 1998b),
is subject to ongoing research.
ACKNOWLEDGEMENTS
The authors thank the support received through the
research grants PGIDIT04TIC206011PR, TIC2003-
09400-C04-03 and TIN2005-03844.
REFERENCES
Cichosz, P. (1997). Reinforcement Learning by Truncating
Temporal Differences. PhD thesis, Dpt. of Electron-
ics and Information Technology, Warsaw University
of Technology.
Cobb, H. G. and Grefenstette, J. J. (1993). Genetic al-
gorithms for tracking changing environments. In
Proc. Fifth International Conference on Genetic Al-
gorithms.
David E. Moriarty, Alan C. Schultz, J. J. G. (1999). Evolu-
tionary algorithms for reinforcement learning. Journal
of Artificial Intelligence Research, 11:241–276.
Davidor, Y. (1991). Genetic algorithms and robotics. A
heuristic strategy for optimization. World Scientific.
Grefenstette, J. J. (1992). Parallel Problem Solving from
Nature, volume 2, chapter Genetic algorithms for
changing environments.
R. Iglesias, C. V. Regueiro, J. C. and Barro, S. (1998a). Im-
proving wall following behaviour in a mobile robot
using reinforcement learning. In ICSC International
Symposium on Engineering of Intelligent Systems,
EIS’98.
R. Iglesias, C. V. Regueiro, J. C. and Barro, S. (1998b).
Supervised reinforcement learning: Application to a
wall following behaviour in mobile robotics. In Inter-
national Conference on Ingustrial & Engineering Ap-
plications of Artificial Intelligence & Expert Systems.
R. Iglesias, M. F. D. and Barro, S. Learning of perceptual
states in the design of an adaptive wall-following be-
haviour. In European Symposium on Artificial Neural
Networks, ESANN 2000.
COMBINING REINFORCEMENT LEARNING AND GENETIC ALGORITHMS TO LEARN BEHAVIOURS IN
MOBILE ROBOTICS
195
