
OPTICAL FLOW NAVIGATION OVER
ACROMOVI ARCHITECTURE
Patricio Nebot and Enric Cervera
Robotic Intelligence Lab
Campus de Riu Sec, E-12071 Castell
´
on de la Plana, Spain
Keywords:
Mobile robots, Multiagent systems, Optical flow, Motion parameters, Obstacle avoidance.
Abstract:
Optical flow computation involves the extraction of a dense velocity field from an image sequence. The pur-
pose of this work is to use the technique of optical flow so that a robot equipped with a color camera can
navigate in a secure way through an indoor environment without collide with any obstacle. In order to im-
plement such application, the Acromovi architecture has been used. Acromovi architecture is a distributed
architecture that works as middleware layer between the robot architecture and the applications, which al-
lows sharing the resources of each robot among all the team. This middleware is based on an agent-oriented
approach.
1 INTRODUCTION
During years, the problem of processing image se-
quences for calculating the optical flow has been stud-
ied. The optical flow can be used in many appli-
cations, but recently it has been applied in mobile
robot navigation (R. Carelli, 2002) (M. Sarcinelli-
Filho, 2002).
The optical flow is the distribution of the apparent
velocities of movement of the brightness pattern in an
image, and arises from the relative movement of some
objects and a viewer (Horn and Schunck, 1981). As
the robot is moving around, although the environment
is static, there is a relative movement between the ob-
jects and the camera onboard the robot.
The visual information coming from the camera
of the robot is processed through the optical flow
technique, which provides the information the robot
needs to safely navigate in an unknown working-
environment.
From the optical flow generated in this way the
robot can get an inference on how far an object
present in a scene is. This information is embedded in
the time to crash (or time to collision) calculated from
the optical flow field (M. Sarcinelli-Filho, 2004).
The purpose of this work is to use the optical flow
technique to allow a mobile robot equipped with a
color camera navigates in a secure way through an in-
door environment without collide with any obstacle.
2 DESCRIPTION OF THE
ACROMOVI ARCHITECTURE
As has been shown in previous works and papers,
Acromovi architecture is a distributed architecture for
programming and controlling a team of multiple het-
erogeneous mobile robots that are capable to cooper-
ate between them and with people to achieve service
tasks in daily environments.
This architecture allows the reutilization of code,
due to the use native components. It allows the shar-
ing of the robots’ resources among the team and an
easy access to the robots’ elements by the applica-
tions. And other two important characteristics of the
Acromovi architecture are the scalability and the fa-
cility of use.
Moreover, Acromovi architecture is a framework
for application development by means of embedding
agents and interfacing agent code with native low-
level code. Cooperation among the robots is also
made easier in order to achieve complex tasks in a
coordinated way. Also, Acromovi architecture is a
distributed architecture that works as a middleware of
another global architecture for programming robots.
This middleware is based on an agent-oriented ap-
proach. The embedded agents that constitute the
Acromovi architecture work as interfaces between the
applications and the physical elements of the robots.
Some agents also make easier the handle of these ele-
500
Nebot P. and Cervera E. (2006).
OPTICAL FLOW NAVIGATION OVER ACROMOVI ARCHITECTURE.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 500-503
DOI: 10.5220/0001207805000503
Copyright
c
SciTePress
ments and provide higher-level services.
This middleware level has been divided into two
layers. In the lower layer, there are a set of compo-
nents that access to the physical parts of the robots
and other special components that offer services to the
upper layer. The upper layer comprises a variety of
embedded agents addressed to supervise and control
the access to the agents of the lower layer.
3 BACKGROUND THEORY
3.1 Optical Flow
Optical flow computation consists in extracting a
dense velocity field from an image sequence assum-
ing that intensity or color is conserved during the dis-
placement. This result may be used by other appli-
cations like 3D reconstruction, time interpolation of
image sequences using motion information, segmen-
tation and tracking (Qu
´
enot, 1996).
The optical-flow field used in this work is obtained
by using formulas and constraints used by Horn and
Schunck (Horn and Schunck, 1981). The equation
that relates the change in image brightness at a point
to the motion of the brightness pattern is:
E
x
u + E
y
v + E
t
= 0 (1)
where, E(x,y,t) represents the value of brightness
at time t of a point with coordinates (x,y) in the image
plane. Ex, Ey, Et represent the partial derivatives of
E with relation to x, y, t respectively. u, v denote the
components of optical flow along x and y respectively.
3.2 Time to Contact
A primary use of optical flow is collision detec-
tion, in particular time-to-contact computation. Us-
ing only optical measurements, and without knowing
ones own velocity or distance from a surface, it is pos-
sible to determine when contact with a visible surface
will be made (Camus, 1995).
Figure 1: Optical geometry for time-to-contact.
A point of interest P at coordinates (X, Y, Z) is pro-
jected through the focus of projection centered at the
origin of the coordinate system (0,0,0). P is fixed in
physical space and does not move. The origin /focus
of projection however moves forward with velocity
dZ/dt. If the camera is facing the same direction as
the direction of motion, then this direction is what is
commonly known as the focus of expansion (FOE),
since it is the point from which the optical flow di-
verges. The image plane is fixed at a distance z in
front of origin.: for convenience, we set z=1 (The ac-
tual value of z depends on focal length of camera). P
projects onto point p in this plane. As the image plane
moves closer to P, the position of p in the image plane
changes as well. Using equilateral triangle:
y/z = y/1 = Y/Z (2)
Differentiating with respect to time, we get:
y/ ˙y = −(Z/
˙
Z) =τ (3)
The quantity τ is known as the time-to-contact.
Note that the left-hand side contains purely optical
quantities, and that knowledge of τ does not provide
any information about distance and velocity, but only
of their ratio.
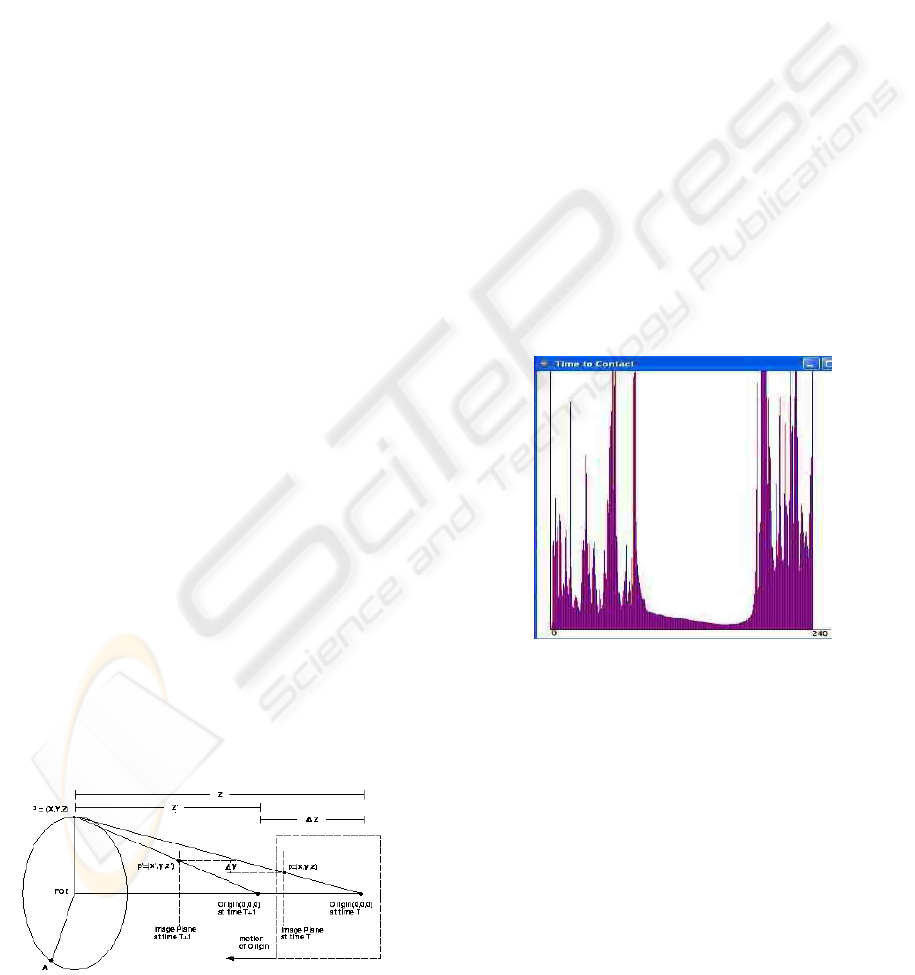
Figure 2: Example of time-to-contact graphic.
Based on the optical-flow field obtained as de-
scribed above, the sensing subsystem delivers to the
control subsystem information on the time to collision
corresponding to distinct stripes in the visual field of
the robot, that can be seen in Fig. 2. In addition to the
vector of times to collision itself, the average value
and the standard deviation corresponding to its ele-
ments are also calculated.
3.3 Control System
Regarding the time-to-contact results shown in Fig. 2
and the additional information associated to them,
three different situations are considered here when
OPTICAL FLOW NAVIGATION OVER ACROMOVI ARCHITECTURE
501
implementing a system to control the heading angle
of the robot. They are labeled Imminent Collision,
Side Obstacle and Normal situations.
Imminent Collision is characterized either when
the average value and the standard deviation associ-
ated to the values of time to collision are both very
small (meaning that a wide object is very close to
the robot), or when an object for which the num-
ber of time-to-contact values inferior to the threshold
adopted is greater than another threshold is detected
in the middle of an image frame.
However, if an object for which the number of
time-to-contact values that are less than the threshold
adopted is greater than another threshold is detected
in the right side or in the left side of the visual field of
the robot, the situation named Side Obstacle is char-
acterized.
Finally, the Normal situation is characterized when
no objects with high average optical flow magnitude
are detected in the image frame. This means that all
objects in the visual field of the robot are not close
enough to deserve an abrupt manoeuvre.
4 SYSTEM DEVELOPMENT
Three new agents have been designed for the develop-
ment of this application, the Vision Agent, the Opti-
calFlow Agent, and the Control Agent. Each of these
agents implements each of the modules described in
previous sections. A diagram of the relation among
these agents can be seen in Fig. 3.
Figure 3: Interaction among the agents.
The first agent involved in the process is the JMF
Agent, which is in charge of capturing the input image
frames. The video from the camera on board the robot
is captured using the Java Media Framework (JMF).
Then, this image is sent to the next agent in the
process, the OpticalFlow Agent. This agent performs
two different works. Firstly, it calculates the optical
flow derived from the new image, using the formulas
described above. Then, it calculates, from the optical
flow, the time-to-contact vector, using also the formu-
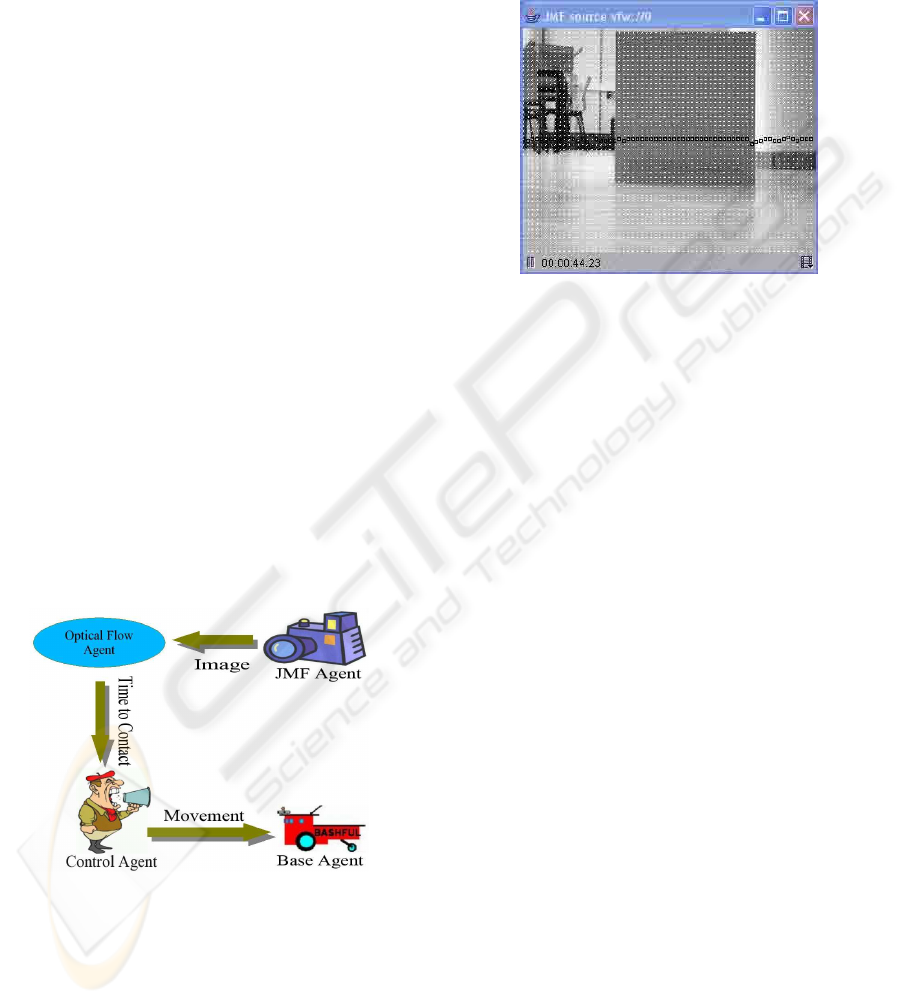
las described above in the article. In Fig. 4, there is
an example of the optical-flow field and in the Fig. 2,
the time-to-contact graphic.
Figure 4: Optical flow field.
Next, the OpticalFlow Agent sends the information
corresponding to the time to contact to the Control
Agent. This agent, depending on the graphic, can dis-
tinguish three distinct situations, as it has been said
above. These situations are Imminent Collision, Side
Obstacle, and Normal situations. Depending on the
situation that the Control Agent recognizes, it sends
different actions to the Base Agent, in order to the
robot can avoid an obstacle or can follow its way.
The Imminent Collision situation is done when an
object is in the middle of the image frame. That is, the
elements 80 to 160 of the vector of times to collision
have the values less than the others. In such cases, the
actions the Control Agent sends to the Base Agent are
to go back about 10 cm, to rotate 180 degrees and to
move ahead again.
The Side Obstacle situation is done when an object
is in the right or in the left side of the image frame.
The obstacle is in the right side when the elements
160 to 240 have the smaller values, and it is in the
left side when the elements 0 to 80 have the smaller
values. In such cases, the manoeuvre adopted sent to
the Base Agent is to rotate 15 degrees in the opposite
direction and to resume moving ahead.
Finally, the Normal situation is executed when no
object is in the image frame. In this case, all the ele-
ments of the vector of times to collision have similar
values. So, the command sent to the Base Agent is to
continue moving straight ahead.
It is important to remark that the time spent in cal-
culating the three parameters needed to the execution
of the application (the average value and the standard
deviation associated to the 240 values of time to colli-
sion used to build the graphic of Fig. 4 and the average
value of the magnitude of the optical flow vectors as-
ICINCO 2006 - ROBOTICS AND AUTOMATION
502

sociated to each object detected in the scene) is very
small, not decreasing the capability of the robot to re-
act in real-time.
5 EXPERIMENTAL RESULTS
In order to check the performance of the robot when
wandering in its working-environment using the sens-
ing and control subsystems discussed here the robot
is programmed to wander around the lab, avoiding all
the obstacles it detects.
The robot used for it is a Pioneer2 mobile robot
with an onboard computer based on the Intel Celeron
650 MHz processor, having 508 Mbytes of RAM
memory. A Logitech web camera is also available
onboard the robot. The image capturing program in
java grabs the images that are at most 320x240 pixels
bitmaps at 5 fps in Linux platform.
An analysis of all the actions the robot has taken
shows that it was effectively able to avoid the obsta-
cles that appeared in its way, as expected, using the
time-to-contact based sensorial information.
As mentioned above, the robot acquires image
frames continuously at the interval of 200 ms, the cal-
culation of the optical flow vectors plus the calcula-
tion of the new heading angle is compatible with the
rate of acquisition of images, thus showing that the
use of optical flow for this kind of sensing is suitable.
In order to synchronize the calculation with the image
acquisition time, an image of 240x180 pixels is used.
6 CONCLUSIONS AND FUTURE
WORK
New agents have been implemented based on the
Acromovi architecture to make feasible that the robot
can navigate in an environment using the optical flow
technique. These agents have been implemented
taking into account the limited computational setup
available onboard the robot.
The experimental results have shown that the robot
is effectively able to avoid any obstacle, in real-time,
based only on the information from the optical-flow
and the time-to-contact agents.
Regarding the future work to do with the described
system, first, sonars will be also used to distinguish
those situations in which an object is too close to the
robot and permits the robot to realize the evasive ma-
noeuvre. Another important improvement is to try to
change from the wander behaviour to a most reliable
navigation, following a specific path or trying to get
to a specific point in the working-environment.
It is important to try of reducing the time consump-
tion by the calculation of the optical flow. For that,
it can be used new methods faster than the used in
this work. One possible option that implies a little
variation over the original method is the described in
(D.F. Tello, 2005). So, with a few changes it is pos-
sible to get a system faster and capable to react in a
more reliable way to changes in the environment.
Finally, this work can be extended to a team of
robots that can cooperate so that a certain robot with-
out the needed resources could navigate using the op-
tical flow technique can do it. This can be possible
thanks to one of the advantages of the Acromovi ar-
chitecture, the possibility to share resources among
the robots of the team.
ACKNOWLEDGEMENTS
Support for this research is provided in part by ”Min-
isterio de Educaci
´
on y Ciencia”, grant DPI2005-
08203-C02-01, and by ”Generalitat Valenciana”,
grant GV05/137.
REFERENCES
Camus, T. (1995). Calculating time-to-contact using real-
time quantized optical flow. In National Institute of
Standards and Technology NISTIR 5609.
D.F. Tello, e. a. (2005). Optical flow calculation us-
ing data fusion with decentralized information filter.
In Proceedings of IEEE International Conference on
Robotics and Automation (ICRA 2005).
Horn, K. and Schunck, B. (1981). Determining optical flow.
Artificial Intelligence, 17:185–203.
M. Sarcinelli-Filho, e. a. (2002). Using optical flow to con-
trol mobile robot navigation. In Proceedings of the
15th IFAC World Congress on Automatic Control.
M. Sarcinelli-Filho, e. a. (2004). Optical flow-based reac-
tive navigation of a mobile robot. In Proceedings of
the 5th IFAC/EURON Symposium on Intelligent Au-
tonomous Vehicles.
Qu
´
enot, G. (1996). Computation of optical flow using dy-
namic programming. In Proceedings of International
Workshop on Machine Vision Applications.
R. Carelli, e. a. (2002). Stable agv corridor navigation with
fused vision-based control signals. In Proceedings of
the 28th Annual Conference of IEEE Industry Elec-
tronics Society.
OPTICAL FLOW NAVIGATION OVER ACROMOVI ARCHITECTURE
503
