
TOWARD 3D FREE FORM OBJECT TRACKING USING SKELETON
Djamel Merad
LIRIS laboratory
5 avenue Pierre Mendes-France, 69676 Bron
Jean-Yves Didier
LSC Laboratory
40 , Rue du Pelvoux, 91020 Evry Cedex
Keywords:
Tracking, 3D free form object, Skeletonization, Graph matching.
Abstract:
In this paper we describe an original method for the 3D free form object tracking in monocular vision. The
main contribution of this article is the use of the skeleton of an object in order to recognize, locate and track
this object in real time. Indeed, the use of this kind of representation made it possible to avoid difficulties
related to the absence of prominent elements in free form objects (which makes the matching process easier).
The skeleton is a lower dimension representation of the object, it is homotopic and it has a graph structure.
This allowed us to use powerful tools of the graph theory in order to perform matching between scene objects
and models (recognition step). Thereafter, we used skeleton extremities as interest points for the tracking.
1 INTRODUCTION
Object tracking is an important field of artificial vi-
sion. It is a difficult problem involved in tasks as mo-
tion evaluation or automatic visual control. The possi-
ble application are from medical imagery to security,
including the road traffic analysis, etc.
The most part of algorithms allowing 3D pose esti-
mation from a 2D images sequence are based on the
same principle. The first step consists in recognizing
the type of target in order to choose the best model
from a database (initialization). The second step, per-
formed during the treatment, consists in target track-
ing.
An initial pose of the objet is known either by an
initialization process before tracking, or by a predic-
tion process using the results obtained from the pre-
vious image. This initial pose allows to project the
target’s model onto the image’s plane. Starting from
this projection, it is possible to know if the pose is
good or not. A comparison measure between the 2D
image and the projected model allows a pose adjust-
ment (fitting).
The general principle of tracking is common to all
the methods. Nevertheless they significantly vary ac-
cording to their matching method or prediction tech-
niques. Among the different existing tracking meth-
ods, we will cite the one of Lowe (Lowe, 1992)
(Lowe, 1987) , of Gennery (Gennery, 1982) (Gennery,
1992) and of Harris (Harris and Stennet, 1990) which
we can qualify as generic methods. These three track-
ing methods give very good performances and use al-
gorithms of different complexities.
Some other methods were developed since. Some
model based approaches use the automatic visual con-
trol to track the salient edges of a model (Drum-
mond and Cipolla, 2002) while some other methods
use primitives as points, lines, or ellipses (Marchand
et al., 1999) (Comport et al., 2003). However, the pre-
sented methods were been developed for polyhedral
models having straight edges, which facilitate their
detection. That is the reason why these methods can
not be applied on free form object tracking.
To track free form objects, some methods use a pri-
ori and a posteriori information. These methods either
will index several images (shots) of the target object
depending on some points of interest and stock them
in a database, or will build a model starting from this
camera shot. The objets are tracked using ”patches”
together with the indexed images for a homographi-
cal matching (Vacchetti et al., 2004). Another way
to manage free form object tracking is to use a poor
sparse metric environment model in order to perform
real time model tracking using the camera (Skrypnyk
and Lowe, 2004). Unfortunately, these systems need
a learning step on several shots of the real object, they
can not use the 3D model only.
The most of the effective tracking methods were
74
Merad D. and Didier J. (2006).
TOWARD 3D FREE FORM OBJECT TRACKING USING SKELETON.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 74-81
DOI: 10.5220/0001207400740081
Copyright
c
SciTePress
developed for polyhedral objects. It would be enough
to extract a polyhedral primitive of our free form ob-
ject and to adapt the existing tracking algorithms. We
succeeded by using skeletons for the free form ob-
ject representation. Indeed, a skeleton is an object
representation in an inferior dimension. It has the ad-
vantage to preserve the most of the topological and
geometrical information of the silhouette. The skele-
tonization or the object representation by a set of seg-
ments, allows us to bypass the problem related to free
form objects.
In image processing and computer vision in gen-
eral, there are many applications for 2D and 3D ob-
jects skeletons (encoding, compression etc.). Further
to our interesting results obtained with this formalism
in free form object recognition and localization , we
explored its application to tracking this kind of ob-
jects.
More precisely, we adapted the Lowe method
(Lowe, 1992) to track a 2D skeleton using a 3D skele-
ton, therefore to track a 3D object in a 2D shot. The
points of interest we used are the two skeleton extrem-
ities. The initialization step corresponds to the target
pose computing, without any a priori knowledge of
the scene. The initialization system is described in
section (2) . Once the initial position of our object
known, it is possible to start tracking.
The 3D skeleton is projected on the image plane,
starting from its initial position, by using previously
calculated rotation and translation matrices. The algo-
rithm uses the fact that there is a small displacement
between two consecutive images in a video. There-
fore the positions of 2D skeleton points in two images
will be very close. A comparison measure between
the 2D skeleton of the image and the projected 3D
skeleton of the model is used for a pose adjustment.
This step is presented in section 3 and the obtained
results are presented in section 4.
2 INITIALISATION
In this section we present the identification and the lo-
calization of 3D free form objects, starting from a 2D
image of scene, where partial occlusions may appear.
We analyzed the architecture of 3D free form more
popular recognition systems and we noticed the diffi-
cult problems to which they are confronted with.
Some of these difficulties are: to build the model
for complex objects, primitive extraction allowing a
correct matching and the lack of salient elements al-
lowing a robust pose estimation. We also can cite
complexity and occlusion problems which have not
a satisfactory solution.
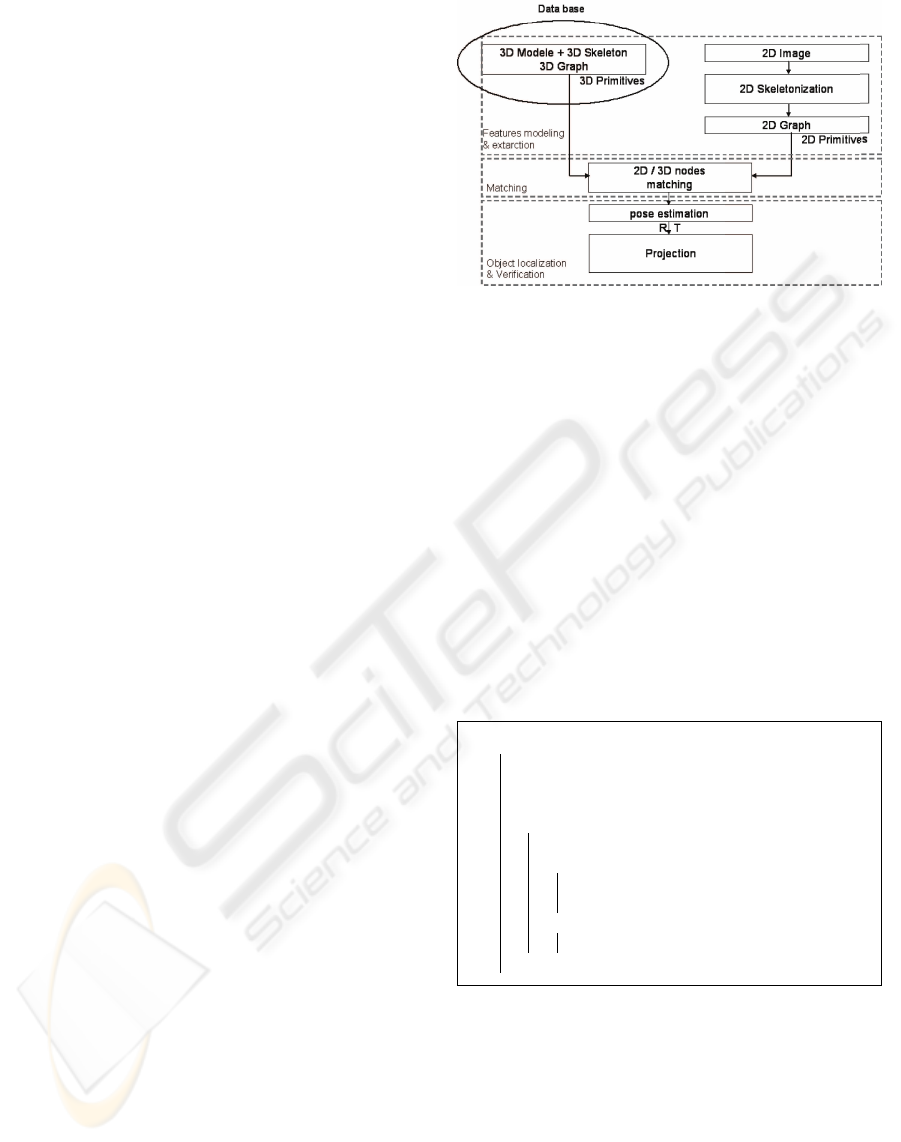
The approach we developed (figure 1), is based on
using a 3D skeleton of an a priori known model and
Figure 1: 3D free form object recognition by using skele-
tons.
the on-line extraction of the 2D skeleton of an image
of the object in front of the camera. The utilization
of this formalism allowed us to solve the problems
presented before: pose estimation and robustness to
occlusions and auto-occlusions. Our method is essen-
tially composed of three phases.
• Primitives modelization and extraction: search for
an appropriate representation and primitive detec-
tion in the image/model.
• Matching: search of the appropriate model for cor-
responding primitives
• Localization and verification: matching validation
and pose estimation.
1. RecoginitionSystem (image I, {3DGraph G
2
}):
2.
S ←− Skeletonization (I);
3.
G
1
←− SkeletonToGraphTransform(S);
4.
hypothesis ←− Indexation(G
1
, {G
2
});
5.
for each h from {hypothesis} do
6.
h
′
←− HypothesisChecking(G
1
, h);
7.
if h
′
6= null then
8.
OverlayImageWithModel;
9.
exit;
10.
else
11.
h ←− NextHypothesis;
12.
display(“No corresponding model for this image”);
Figure 2: 2D/3D identification using skeletons.
2.1 Modelization and Primitives
Extraction
The skeletonization represent an important step of our
method. Since this concept appeared as form de-
scriptor, many skeletonization algorithms have been
proposed in the literature. The different skeletoniza-
tion techniques can be classified in two categories.
TOWARD 3D FREE FORM OBJECT TRACKING USING SKELETON
75
The discrete methods, as thinning, ”grassfire” po-
tential fields, the distances maps (Tek and Kimia,
1998) (Nilsson and Danielsson, 1997) (Malandain
and Fernandez-Vidal, 1998) (Kegl and Krzyzak,
2002) and the continuous methods, based on Voronoi
diagrams (Attali and Montanvert, 1997) (Fabbri et al.,
2002).
The discrete domain algorithms are very popular,
often used due to their simplicity. Unfortunately the
obtained skeletons are often sensitive to image rota-
tion and the connectivity is not always preserved and
often needs a post-processing. In the continuous do-
main, the skeleton is a sub-graph of a Voronoi dia-
gram. The points of the object shapes represent a
sampling of the continuous surface. The Voronoi di-
agram is built starting from this sampling in order to
extract the skeleton. This method has several advan-
tages. Only the shape points are needed, which al-
lows to considerably reduce the number of points to
be processed. The obtained skeleton is connected and
topologically equivalent, because the shape represen-
tation of the objects implicitly preserve these aspects.
Do not using a discrete coordinates grid, allows us
to use the Euclidean distance, therefore the skeleton
is not sensitive to image rotation. Another benefit
is the skeleton has a graph structure (without post-
processing), easy to parse.
Unfortunately there are also some drawbacks for
this kind of methods. The main problem is the choice
of a sub-graph that represents the nearest approxima-
tion of the skeleton. Another problem of the con-
tinuous domain comes from the construction of the
Voronoi diagram. The diagrams presented in this ar-
ticle are always limited to non-aligned and no co-
circular seeds. For real images we have a great num-
ber of such cases. This forces us to move the seeds,
leading to a bad localization of the skeleton. Further-
more, the skeletons are very sensitive to noise induced
by the sampling. Therefore an extra-processing has to
be performed to prune the unwanted edges.
We used a hybrid method to compensate for these
shortcomings. In this method we combined the two
techniques: the one based on distance map and the
one based on Voronoi diagram, in order to benefit by
their strong points. This skeletonization algorithm has
been tested on different images. The experimental re-
sults showed that it guarantee the complete connec-
tivity of the skeleton, the homotopy, the geometric in-
variance and also a good localization. The figures 3
and 4 show the results of this technique on real im-
ages.
In order to obtain an efficient matching, it is essen-
tial to have a close representation of the model and
of the image. In our approach, the skeletonization re-
sults in two graphs named 3D and 2D. The 3D graph
is obtained from the 3D homotopic skeleton which is
itself computed from the 3D model. This represents
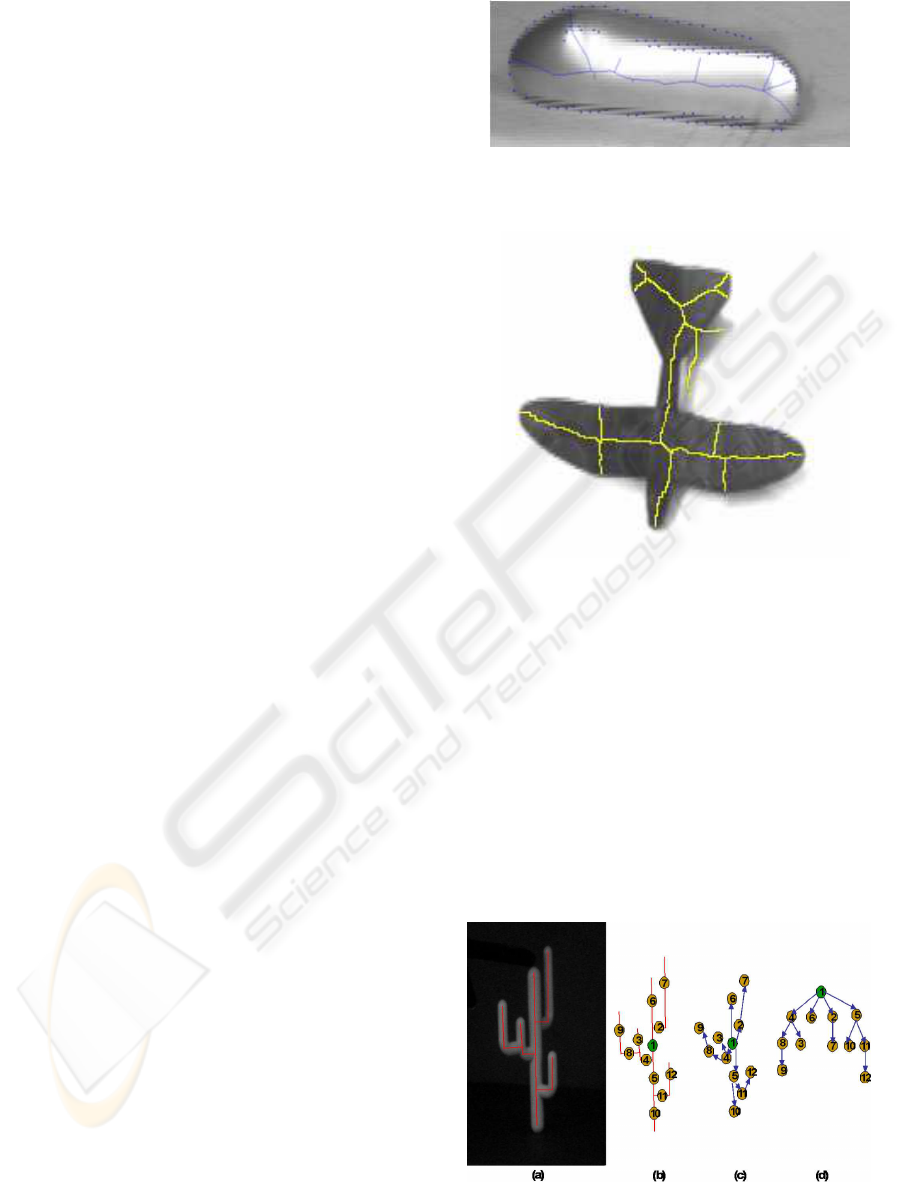
Figure 3: Hull object and 2D skeleton.
Figure 4: Plane object and 2D skeleton.
an off-line operation.
An on-line skeletonization of 2D scene image (sec-
ond line of figure 2) allows to build the 2D graph (line
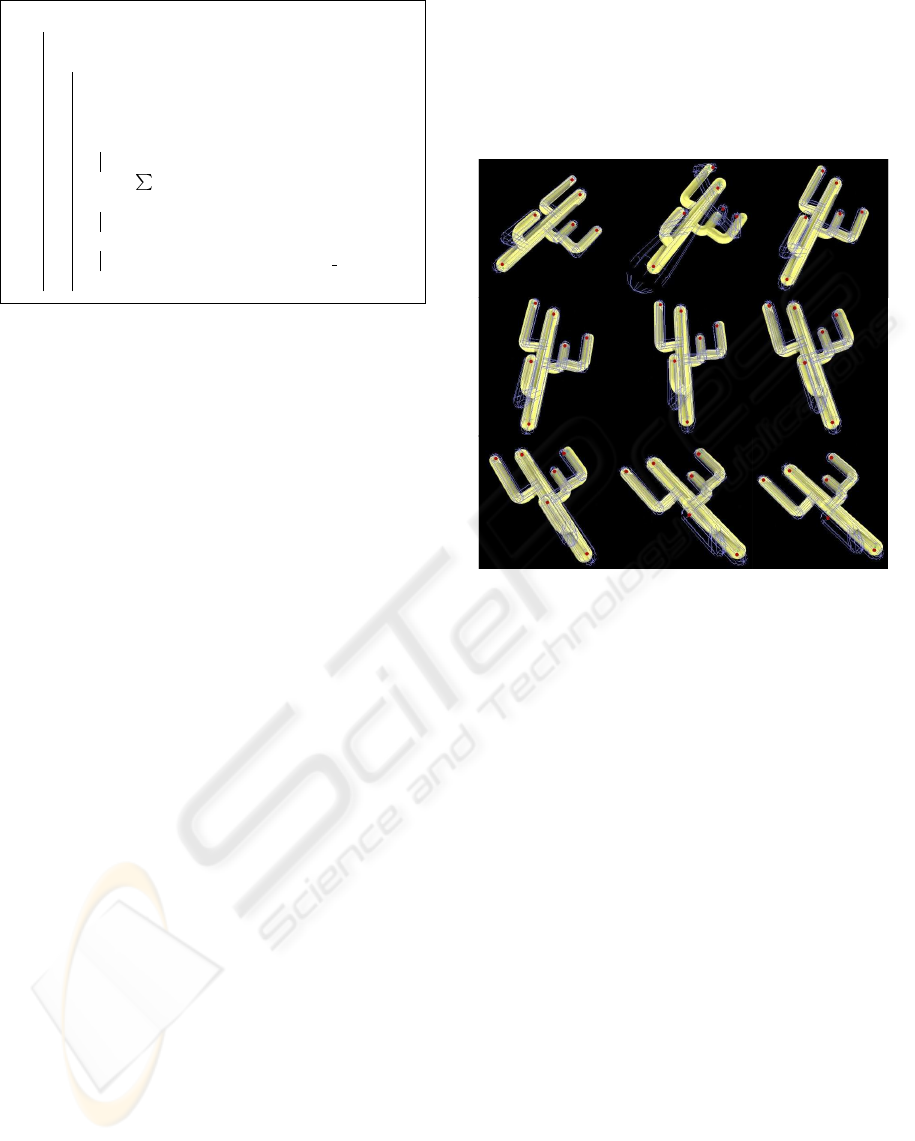
3 of figure 2). Our method code these graphs in such
a way that each skeleton graph store topological and
geometrical information of the initial form. Indeed,
each node of the graph represents a skeleton element
that is a 2D segment for the 2D graph and a 3D seg-
ment for the 3D graph. Each edge in the graph rep-
resents a link between the different elements of the
skeleton (figure 5).
Figure 5: Graph construction from the skeleton.
ICINCO 2006 - ROBOTICS AND AUTOMATION
76

2.2 Matching
The recognition consists in establishing an isomor-
phism between the 3D graph from the database and
the 2D graph obtained from the image. The prob-
lem is to establish a good quality measure for graph
matching. In our application, this task is difficult be-
cause the measure has to evaluate the similarity de-
gree between similar structures of two sub-graphs,
in order to manage the occlusion, shadow problems.
Therefore, it has to allow, in the recognition step, to
quickly choose the best model from the database (line
4 in figure 2) and also to perform a one to one node
matching, in order to locate and validate this hypoth-
esis (lines 5 to 12 in figure 2).
After studying several graph matching algorithms,
we implemented an isomorphism-based method us-
ing the topological signatures of each node. This
approach was used by Shokoufandeh (Shokoufandeh
and Dickinson, 1999), Siddiqi (Siddiqi et al., 1999)
and Macrini (Macrini et al., 2002) to match two shock
graphs. We introduced several modifications on this
method in order to obtain a robust matching algorithm
at the final nodes level and also to carry out the nodes
”polygamy” i.e. a node can be matched at the same
time with several nodes.
In order to topologically describe a tree we used
graphs eigenspaces. We remember that each graph
can be represented as a adjacency matrix of {0, 1}.
The values 1 give adjacent nodes of the graph (and
0 on the diagonal). The eigenvalues (EV) of the adja-
cency matrix of the graph store some significant struc-
tural properties of the graph (tree).
Explicitly, let T be a tree of maximum degree
∆ (T ) and T
1
, T
2
. . . , T
s
the sub-trees of its root. For
each sub-tree T
i
, the degree of its root is δ (T
i
). To
calculate this signature, we compute the eigenvalues
of each adjacency matrix of each sub-tree T
i
. Let S
i
be the sum of δ (T
i
) eigen values of T
i
. Then the
ordered elements S
i
, become the components of the
vector χ of dimension ∆ (T ) called topological sig-
nature and assigned to the tree’s root. If the elements
number S
i
is lower than ∆ (T ), then the vector is
filled with 0. This method is recursively repeated in
order to assign a vector to each node of the tree.
As we already mentioned, a trees isomorphism can
not exist between the image skeleton and the model
skeleton because of the occlusions or/and the noise.
The solution consists in finding a maximal cardinal-
ity and minimal weight matching in a bipartite graph
covering the nodes of the two skeletons. The bipartite
graph is a graph where each edge is pondered by the
topological distance.
We remember that our algorithm allows in a first
time to index the object’s skeleton in a database -
which corresponds to the recognition step. In a sec-
ond time, it allow a one-by-one matching of the nodes
needed in the localization and verification step.
2.3 Projection and Verification
In the precedent step, due to the noise, there are sev-
eral matching hypothesis. To verify a hypothesis va-
lidity we will estimate the rigid transformation be-
tween the recognized (presumed) model and the cam-
era. The model projection on the image allows to ac-
cept or reject this hypothesis. Each matched couple
corresponds to a segment couple, one of the 2D skele-
ton and the other of the 3D curvilinear skeleton. We
project the primitives of the 3D object model on the
image plane. If the projected primitives do not co-
incide with the image primitives, according to a pre-
established threshold, then the hypothesis is rejected
and we treat the next hypothesis and so forth. If the
points of the 3D skeleton projected on the image do
not coincide with the points of the 2D skeleton, then
the object is not recognized.
This verification module is based on the measure-
ment of this error (1) which is the distance in the
image (in pixels) between, each time, a 2D skeleton
point and a 3D skeleton point projected on the image.
error =
v
u
u
t
1
N
N
X
i=1
(ˆu
i
− u
i
)
2
+ (ˆv
i
− v
i
)
2
(1)
Where : N is the number of matching points,
(u
i
, v
i
) the coordinates of a point image,
(ˆu
i
, ˆv
i
) estimation of the object’s point after
projection on the image plane.
The 3D pose estimation consists in finding the
rigid transformation (R, T ) minimising some calcu-
lated error (as the sum of error squares) of the one of
two collinearity equations (in the image space or in
the object space). The two methods generally used
to solve this problem are the Gauss-Newton and the
Levenberg-Marquardt methods (Lowe, 1991).
We used the method of Lu and al(Lu et al., 2000)
named Orthogonal Iteration (OI) algorithm. Contrary
to classical methods, used to solve the optimisation
problems on the whole, the OI algorithm cleverly ex-
ploits the specifical structure of the 3D pose estima-
tion problem.
To estimate the object’s pose, this algorithm uses
an appropriated error function defined in the object’s
space. The error function is rewrited in order to accept
an iteration based on the classical solution of the 3D
pose estimation problem, called absolute orientation
problem.
This algorithm gives exact results and converges
quickly enough, therefore it is very interesting for
real-time applications.
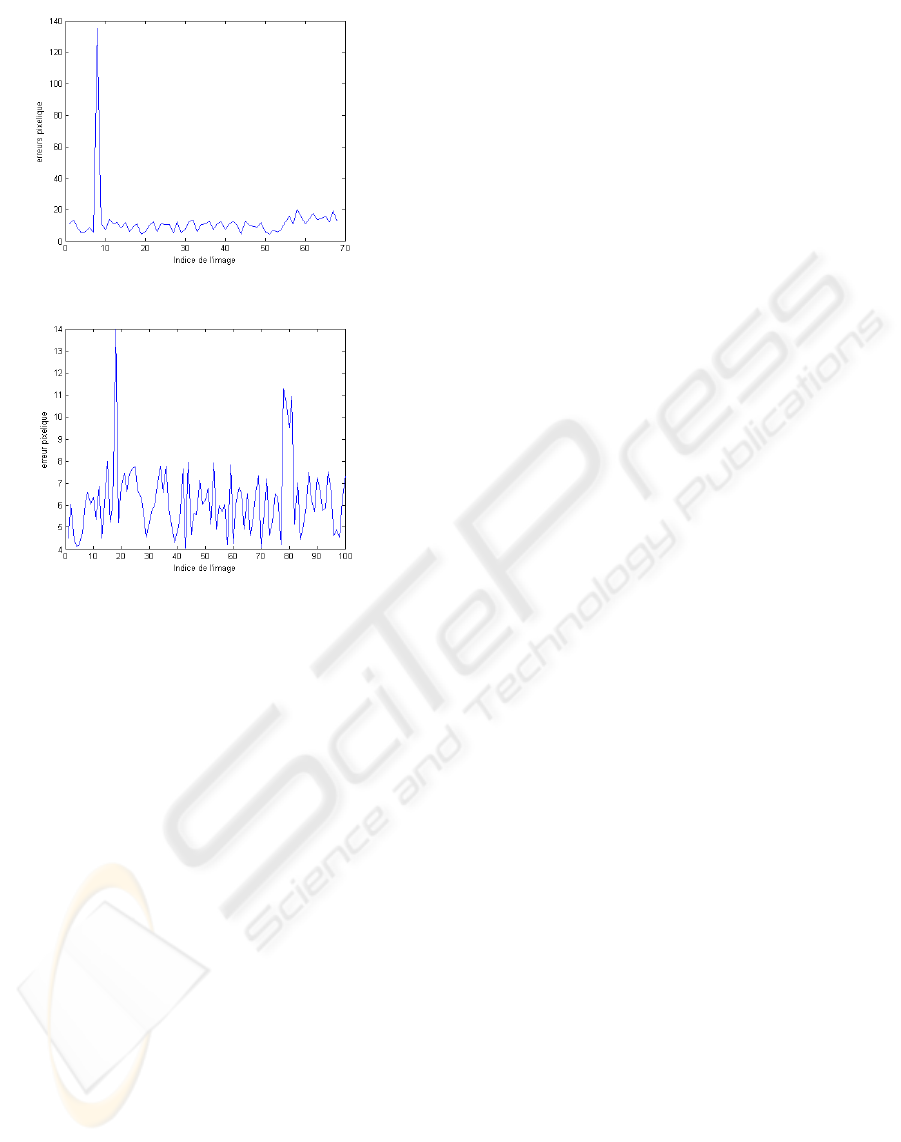
The figures 6 and 7 present some initialization re-
sults. On each figure, from left to right, there are the
TOWARD 3D FREE FORM OBJECT TRACKING USING SKELETON
77

real object and the 3D model recognized by our algo-
rithm and superposed on the real image. There are 10
models in the database and the tests showed that our
methods can correctly recognize and localize several
3D objects even in presence of occlusions or auto-
occlusions and shadows (due to the strength of our
subgraph matching algorithm ).
Figure 6: Cactus object recognition among several objects.
Figure 7: Cactus object recognition with occlusion.
3 TRACKING
The initialization step coresponds to target pose com-
puting, without a priori knowledge of the scene. Once
the initial position of our object known, the tracking
process can start.
1. Tracking(ImageSequence{I
i
}):
2.
{R, T} ←− InitialValues ;
3.
while tracking not finished do
4.
i ←− i + 1;
5.
{E
1
}←− 3DSkeletonEndpointsProjection;
6.
{E
2
}←− 2DSkeletonComputation( I
i
);
7.
for each Endpoint e
1
of E
1
and e
2
of E
2
do
8.
d ←− DistanceComputation(e
1
,e
2
);
9.
{(2D, 3D)} ←− CoupleChoice(d min);
10.
{R,T} ←− NewPoseComputation ({(2D, 3D)});
Figure 8: Tracking algorithm using skeletons.
The original position we used is the one calculated
on the first image during the initialization step (line
2 of figure 8). The 3D skeleton is then projected on
the image plane, starting from this position, by using
the rotation and translation matrices calculated before
(line 5 of figure 8). The algorithm is based on the fact
that there are small movements between two video
frames. The positions of 2D skeleton points will be
very close from one frame to another.
We call p
ij
the positions of the extremities j of the
2D skeleton in the frame i, numbered from 1 to n
i
(their number can vary with the frame). We call q
k
the positions of the projections on the image plane of
the 3D skeleton extremities, built using rotation and
translation matrices R and T respectively.
We suppose the initialization was correct, therefore
at the time of the projection of the 3D skeleton, the
points q
k
which were used to compute the position,
were near their matching points p
ij
. In the next frame
(number (i + 1)), the points p
(i+1)j
are different from
points p
ij
. Anyway, the deviation of the object be-
ing small, there is also a small variation for the 2D
skeleton position. This way the points q
k
which, by
construction, were very close to some points p
ij
, will
be very close to some points p
(i+1)j
. The movement
of our object being very small, the old and the new
2D skeleton are very close one of the other, therefore
theirs extremities are also very close.
By measuring the pixel differences separating the
points p
(i+1)j
and q
k
, and sorting in ascending order,
we can form a number of pairs (p
(i+1)j
, q
k
). Whereas
during initialization matching between the extremities
of the 2D and 3D skeleton required heavy computing,
due to the fact that the position was unknown, it is al-
most immediate here by considering the points 3d at
the origin of q
k
(lines 6 to 9 in figure 8). The orthogo-
nal iteration algorithm we used for initialization is ap-
plied on the pairs (2DPoint , 3DPoint). The 3D points
being obtained by replacing q
k
by the original points
of the 3D skeleton. This provides us a new value for
R and T , which could be used in new computations
on the next frame (line 10 of figure 8).
We improved the Lowe method by integrating the
step of the graph matching in the tracking loop. For
example, in the case of an abrupt and irregular move-
ment or of an important occlusion, the model loses
the object. While applying, our algorithm of graph
matching we succeed to quickly re-localize this ob-
ject. We remind that in this step we already know
which 3D graph corresponds to the 2D graph, in
that case, it is sufficient to make a one-to-one nodes
matching of two graphs. This step is very fast because
the skeletons graphs are small. This procedure is not
called during all the tracking process but only when
the projection error is greater then threshold. The al-
gorithm of the figure 8 becomes as the algorithm of
the figure 9.
ICINCO 2006 - ROBOTICS AND AUTOMATION
78
1. Tracking(ImageSequence{I
i
}):
2.
{R, T} ←− InitialValues ;
3.
while tracking not finished do
4.
i ←− i + 1;
5.
{E
1
}←− 3DSkeletonEndpointsProjection;
6.
{E
2
}←− 2DSkeletonComputation( I
i
);
7.
for each Endpoint e
1
of E
1
and e
2
of E
2
do
8.
d ←− DistanceComputation(e
1
,e
2
);
9.
D ←− (d);
10.
if D > Threshold then
11.
{(2D, 3D)}←−1To1Matching(2DS,3DS);
12.
else
13.
{(2D, 3D)} ←− CoupleChoice(d min);
14.
{R,T}←−NewPoseComputation({(2D,3D)});
Figure 9: New tracking algorithm.
4 RESULTS OF SKELETON
TRACKING
Tracking was implemented in C++ in order to realise
real-time computing. There is a file in specific for-
mat allowing the passage from the initialization step,
realized in Matlab, to tracking. This file contains the
rotation and translation matrices corresponding to the
calculated position, as well as the model of the 3D
skeleton. The tests were realized on syntetic images
in order to validate our hypotesis. Using syntetic im-
ages allows to compare and estimate projection errors
more precisely, because we know the exact pose used
to generate our video. Moreover, that let us to gen-
erate various types of movement in various configu-
rations. Let us specify that although the used object
is a virtual one, its tracking in a sequence of frames
is made realistic (difficult) by simulating shades, re-
flections, noises, self-occlusions. The videos were
built with POV-Ray software to generate the images
and Virtual Dub to realize the video editing. To read
the video stream we used Intel’s OpenCV library.
Its main advantage is that it integrates some image
processing functions.
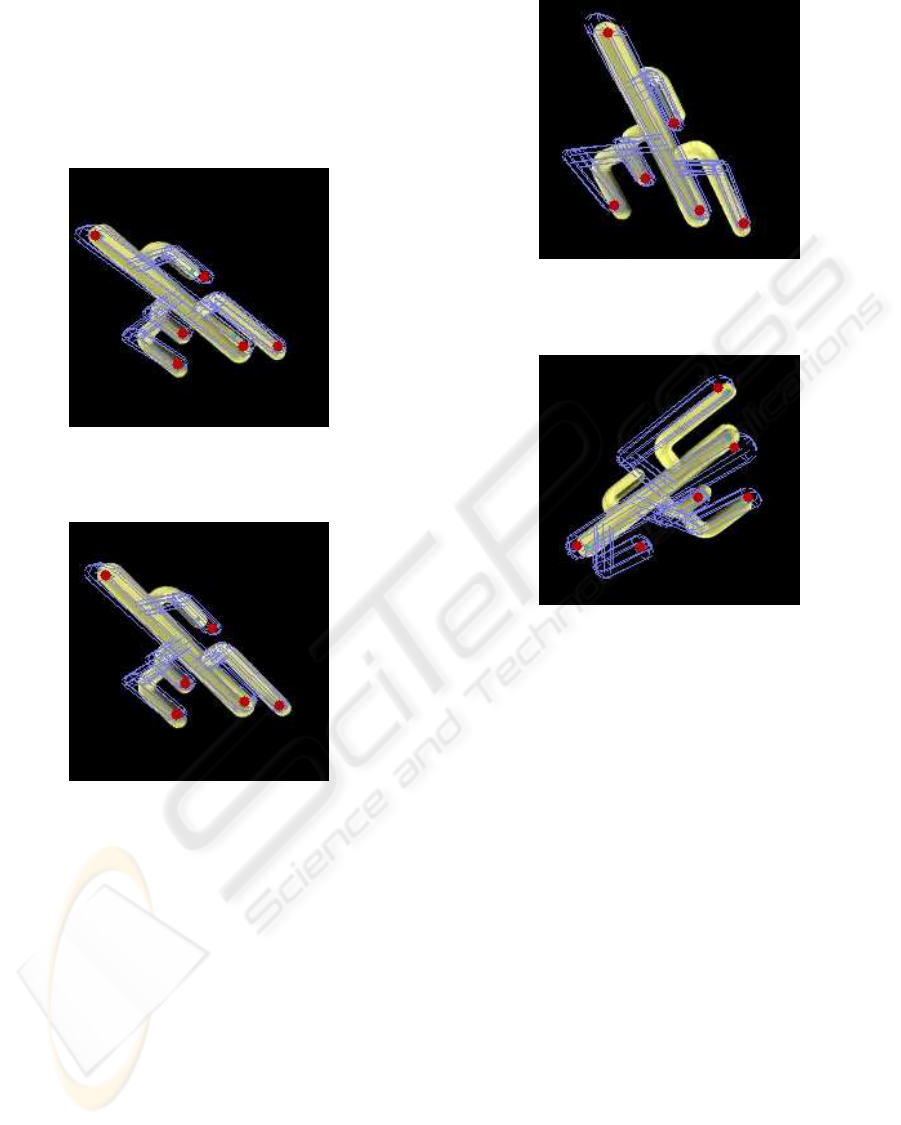
We did several tests and following we will present
only a part. The figure 10 shows the tracking result
on the cactus object, in a 68 first frames sequence.
This figure represents, from left to right and from
up to down, the frames 1, 8, 16, 24, 32, 40, 48, 54,
67 respectively. We present here the most compli-
cated case. We simulated a complex movement with
a strong rotation around axis Z (optical axis of the
camera). The task becomes difficult because of the
disappearance of a part of the object. The tracking
is carried out at the rate of 19 Hz by a wireframe
model (in magenta). The points of interests represen-
tating the extremities of the skeletons are red for the
3D points, and green for the 2D points. The graph
in the figure 11(a) represents the reconstruction errors
(in pixels) for this example. On the whole, the track-
ing is carried out correctly, it happens sometimes that
the model loose the object and recapture it in the next
sequence - image 2 of the figure 10 (frame 8) (due to
the integration of the graph matching procedure). We
can also observe this on the graph of the figure 11(a).
Figure 10: Object tracking sequence.
Another example is presented in the figure 11(b)
which represents the reconstruction errors of the first
100 frames of a video (on a total of 2280 frames) in
which we simulated a translation following x and y
axes and a slight rotation following z. The figures 12,
13 and 14 represent the frames 27, 48 and 78 respec-
tively. We also notice that tracking is correct.
However, in some videos, the algorithm is not able
to efficiently track the object (figure 15). This is
essentialy owed to the absence of a sufficient num-
ber of matchings occuring in the case of occlusions
or self-occlusions. The 3D pose parameters are not
correctly computed. We remember that the used or-
togonal iterations algorithm needs at least four good
non-coplanar matchings. However, after few frames
our algorithm recaptures the object and tracks it effi-
ciently due to the integration of the graph matching
procedure.
5 CONCLUSION
In this article we presented a model based method for
3D free form object tracking. The results of adapt-
ing our skeleton recognition method to object track-
ing were encouraging and justify our approach. Nev-
ertheless we are conscient that some improvements
TOWARD 3D FREE FORM OBJECT TRACKING USING SKELETON
79
(a) During tracking in -R-
(b) During tracking in -RT-
Figure 11: Reconstruction error in pixels.
are needed for efficient tracking. In our future works
we will focus on a 2D robust and fast skeletonization
method. We also project to compensate the weakness
of the Lowe method by adding a prediction step in our
algorithm.
REFERENCES
Attali, D. and Montanvert, A. (1997). Computing & sim-
plifying 2d & 3d continuous skeletons. In Computing
Vision and Image Understanding, Vol 3, N 67, pages
261–273.
Comport, A. I., Marchand, E., and Chaumette, F. (2003). A
real-time tracker for markerless augmented reality. In
Proceedings of the The 2nd IEEE and ACM Interna-
tional Symposium on Mixed and Augmented Reality,
pages 36–45.
Drummond, T. and Cipolla, R. (2002). Real-time visual
tracking of complex structures. In IEEE Transactions
on Pattern Analysis and Machine Intelligence vol. 24,
N. 7, pages 932–946.
Fabbri, R., Estozi, L., and da F. Costa, L. (2002). On
voronoi diagrams and medial axes. In Journal of
Mathematical Imaging and Vision, Vol 1, N 17, pages
27–40.
Gennery, D. B. (1982). Tracking known three-dimensionnal
objects. In Conf. American Association of Artificial
Intelligence, pages 13–17.
Gennery, D. B. (1992). Visual tracking of known three-
dimensionnal objects. In International Journal of
Computer Vision vol. 8, pages 243–270.
Harris, C. and Stennet, C. (1990). Rapid, a video rate object
tracker. In British Machine Vision Conference, pages
73–77.
Kegl, B. and Krzyzak, A. (2002). Piecewise linear skele-
tonization using principal curves. In IEEE Trans-
actions on Pattern Analysis and machine Intelli-
gence,vol. 1, N 24, pages 59–74.
Lowe, D. G. (1987). Three-dimensional object recognition
from single two-dimensional images. In Artificial In-
telligence, vol. 31, no. 3, pages 355–395.
Lowe, D. G. (1991). Fitting parametrized three-dimensional
models to images. In IEEE Transactions on Pattern
Analysis and Machine Intelligence, Vol 13, N 5, pages
441–450.
Lowe, D. G. (1992). Robust model-based motion tracking
through the integration of search and estimation. In
International Journal of Computer Vision vol. 8, no. 2,
pages 113–122.
Lu, C., Hager, G. D., and Mjolsness, E. (2000). Fast and
globally convergent pose estimation from video. In
IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol 22, N 6, pages 610–622.
Macrini, D., Shokoufandeh, A., Dickinson, S., Siddiqi, K.,
and Zucker, S. (2002). View-based 3-d object recog-
nition using shock graphs. In Proc. 16 Th Internatonal
Conference on Pattern Recognition, Quebec.
Malandain, G. and Fernandez-Vidal, S. (1998). Euclidean
skeletons. In Image and Vision Computing, vol. 16,
pages 317–327.
Marchand, E., Bouthemy, P., Chaumette, F., and Moreau, V.
(1999). Robust real-time visual tracking using a 2d-3d
model-based approach. In International Conference
on Computer Vision vol. 1, pages 262–268, Greece.
Nilsson, F. and Danielsson, P. (1997). Finding the minimal
set of maximum disks for binary objects. In Graphical
Models and Image Processing, N 59, vol. 1, pages 55–
60.
Shokoufandeh, A. and Dickinson, S. (1999). Applications
of bipartite matching to problems in object recogni-
tion. In Pro., ICCV Workshop on Graph Algorithms
and Computer Vision.
Siddiqi, K., Shokoufandeh, A., Dickinson, S. J., and
Zucker, S. (1999). Shock graphs and shape matching.
In International Journal of Computer Vision, Vol 35,
N 1, pages 13–32.
Skrypnyk, I. and Lowe, D. (2004). Scene modelling, recog-
nition and tracking with invariant image features. In
Proceedings of the The 3rd IEEE and ACM Interna-
tional Symposium on Mixed and Augmented Reality,
pages 110–117, Arlington,VA.
ICINCO 2006 - ROBOTICS AND AUTOMATION
80
Tek, H. and Kimia, B. (1998). Curve evolution, wave prop-
agation and mathematical morphology. In fourth In-
ternational Symposium on mathematical Morphology.
Vacchetti, L., Lepetit, V., and Fua, P. (2004). Stable real-
time 3d tracking using online and offline informa-
tion. In IEEE Transaction on Pattern Analysis and
Machine, vol. 26, N 10, pages 1385–1391.
Figure 12: Frame 27.
Figure 13: Frame 48.
Figure 14: Frame 78.
Figure 15: Incorrect tracking.
TOWARD 3D FREE FORM OBJECT TRACKING USING SKELETON
81
