
Interacting with our Environment through Sentient
Mobile Phones
Diego López de Ipiña
1
, Iñaki Vázquez
2
and David Sainz
3
Faculty of Engineering, University of Deusto, Bilbao, Spain
Abstract. Th
e latest mobile phones are offering more multimedia features,
better communication capabilities (Bluetooth, GPRS, 3G) and are far more
easily programmable (extensible) than ever before. So far, the “killer apps” to
exploit these new capabilities have been presented in the form of MMS
(Multimedia Messaging), video conferencing and multimedia-on-demand
services. We deem that a new promising application domain for the latest Smart
Phones is their use as intermediaries between us and our surrounding
environment. Thus, our mobiles will behave as personal butlers who assist us in
our daily tasks, taking advantage of the computational services provided at our
working or living environments. For this to happen, a key element is to add
senses to our mobiles: capability to see (camera), hear (michrophone), notice
(Bluetooth) the objects and devices offering computational services. In this
paper, we present a solution to this issue, the MobileSense system. We illustrate
its use in two scenarios: (1) making mobiles more accessible to people with
disabilities and (2) enabling the mobiles as guiding devices within a museum.
1 Introduction
Ambient Intelligence (AmI) [1] involves the convergence of several computing areas:
Ubiquitous Computing and Communication, Context-Awareness, and Intelligent User
Interfaces. Ubiquitous Computing [2] means integration of microprocessors and
computer services into everyday objects like furniture, clothing, toys and so forth.
Ubiquitous Communication enables these objects to communicate with each other and
the user by means of ad-hoc and wireless networking. Context-Awareness implies
adding sentient capabilities both to the environment and the user mobile devices so
that they can understand the current context of the user and offer them suitable
services. An Intelligent User Interface enables the inhabitants of the AmI environment
to control and interact with it in a natural (voice, gestures) and personalised way
(based on preferences and context).
So far, a widespread adoption of Ubiquitous Computing, and as a consequence of
Am
bient Intelligence, has not been possible. The main reason for this has been that to
make these ubiquitous environments reality is necessary to populate them with
proprietary hardware and network infrastructure only available in research and
industry labs. This hardware and network infrastructure provides access to services
and also permits capturing the context of the user, so that the environment can react
López de Ipiña D., Vázquez I. and Sainz D. (2005).
Interacting with our Environment through Sentient Mobile Phones.
In Proceedings of the 2nd International Workshop on Ubiquitous Computing, pages 19-27
DOI: 10.5220/0002564000190027
Copyright
c
SciTePress

sensibly to the current situation of the user. By sensing the current location, identity,
or activity of the user, the surrounding environment can give an impression of having
certain degree of intelligence, i.e. of being sentient. The inhabitants of those
intelligent spaces are often aided by electronic devices that report their identity
(presence) and enable the interaction with the environment.
A key factor to extend the adoption (deployment and use) of Ambient Intelligence
is to utilize off-the-shelf hardware. Nowadays, by far the most commonly owned
consumer device is the mobile phone. Last generation Smart Phones, converging
mobile phone and PDA capabilities all in one, are more capable than ever before.
They have the unique feature of incorporating short range (local) wireless
connectivity (e.g., Bluetooth and Infrared) and Internet (global) connectivity (e.g.,
GPRS or UMTS) in the same personal device. Most of them are Java enabled
programmable devices, and are therefore easily extensible with new applications.
They also feature significant processing power, memory and added multimedia
capabilities (camera, MP3 player). Most importantly, they are the ideal candidates to
intermediate between us and the environment, since they are with us anywhere and at
anytime.
The Bluetooth[3] sensing and communication capabilities of Smart Phones can be
complemented with the utilisation of the mobiles built-in camera and microphone to
sense the objects, devices and services available in the surroundings. So, it is possible
to turn a mobile phone into a sentient device which sees (camera) and listens to
(Bluetooth) surrounding services. The core of this paper illustrates how the Smart
Phone sentient features can be applied to sense and interact with the objects in a
Smart Environment [4], and also to enable user/mobile interaction in a more
natural/accessible way. Thus, a Smart Phone can resemble a universal personal
assistant that makes our daily life much simpler.
The structure of this paper is as follows. Section 2 describes TRIP, a 2-D barcode-
based identification and location system, aimed for PCs. In Section 3 we adapt TRIP
for mobile devices into the MobileEye system. Section 4 describes MobileSense, an
extension to MobileEye, which adds further sensing capabilities to mobile phones.
Section 5 explains how the infrastructure developed for MobileSense and MobileEye
is applied to a real case, the creation of mobile phone-based museum guiding system.
Section 6 discusses some related work and Section 7 finishes with some conclusions.
2 Sensing Context by Reading Barcodes
A sentient entity (environment or device) senses the user current context so that it can
adapt its behaviour and offer, without her explicit intervention, the most suitable
actions. A key part of every sentient system is to gather the context information of the
user such as her location, identity, current time or current activity. Several sensing
technologies [5] have been proposed in the last decade, focusing especially in the
location-sensing area, since location is considered by far the most useful attribute of
context. Previous work of one of the authors in one of those technologies, namely
TRIP, motivated our aim of making mobiles more sentient.
TRIP (Target Recognition using Image Processing) [6] is a vision-based sensor
system that uses a combination of 2-D circular barcode tags or ringcodes (see Fig. 1),
20
and inexpensive CCD cameras (e.g. web-cams, CCTV cameras or even camera
phones) to identify and locate tagged objects in the cameras’ field of view. Compared
with untagged vision-based location systems, the processing demands of TRIP are
low. Optimised image processing and computer vision algorithms are applied to
obtain, in real-time
1
, the identifier (TRIPcode) and pose (location and orientation) of a
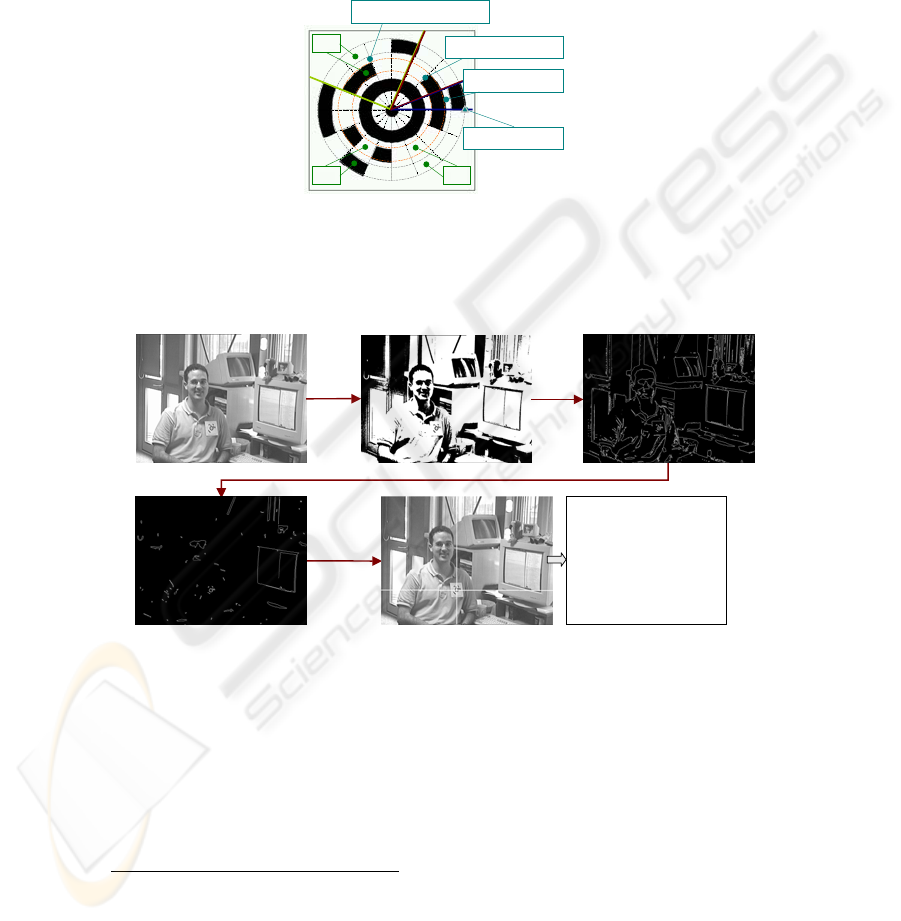
target with respect to the viewing camera. Fig. 2 depicts the video filtering process
undertaken to a frame with a TRIPtag. For more details on the algorithms refer to [6].
1
2
0
sync sector
radius encoding sectors
even-parity sectors
* 10 2011 221210001
x-axis ref point
Fig. 1. TRIPcode of radius 58mm and ID 18,795. TRIP’s 2-D printable and resizable ringcodes
(TRIPtags) encode a ternary number in the range 1-19,683(3
9
- 1) in the two concentric rings
surrounding the bull’s-eye of a target. These two rings are divided into 16 sectors.
Stage 0: Grab Frame Stage 1: Binarisation Stage 2: Edge Detection & Thinning
Stage 3: Edge Following & Filtering
Stages 4-7: Ellipse Fitting, Ellipse Concentricity Test, Code
Deciphering and POSE_FROM_TRIPTAG method
Ellipse params:
x
1
(335.432), y
1
(416.361) pixel coords
a (8.9977), b (7.47734) pixel coords
θ (14.91) degrees
Bull’s-eye radius: 0120 (15 mm)
TRIPcode: 002200000 (1,944)
Translation Vector (meters):
(T
x
=0.0329608, T
y
=0.043217, T
z
=3.06935)
Target Plane Orientation angles (degrees):
( α=-7.9175, β=-32.1995, γ=-8.45592)
d2Target: 3.06983 meters
Fig. 2. Identifying and Locating the TRIPtag attached to a user’s shirt in a 768x576 pixel
image. Location extraction is only possible when the camera used is calibrated.
TRIP is a cost-efficient and versatile sensor technology. Only low-cost, low-
resolution cameras are required. The spare computing resources within a LAN can be
allocated to run the TRIP image parsing software. Commonly available
monochromatic printers can be used to print out the black and white TRIPtags. Its off-
1
Over 20 640x480 pixel images can be processed in a Pentium IV running the C++
implementation of TRIP.
21

the-shelf hardware requirements and software nature (downloadable [6]) enable its
installation in any environment equipped with some PCs.
3 MobileEye: Applying TRIP to Mobiles
Most of the newest Smart Phones feature a camera and programming facilities (Java
[7] or Symbian APIs [8]) to capture images and deliver them to processing servers via
Bluetooth (local) or GPRS (global). These technological factors motivated our
adaptation of the TRIP technology to camera phones. We want to make mobile
phones reactive not only to our explicit interactions (key presses) and network events
(incoming call), but also to the objects and services at the location where the user is.
In essence, we aim to add sensing capabilities to mobile phones. As a first result of
this effort we delivered MobileEye.
The MobileEye application installed in a Smart Phone displays augmented,
enriched views of tagged objects in the user surroundings (e.g. a painting in a
museum), or alternatively renders simple forms to input parameters and issue
operations over the sighted objects (e.g. the front door of our office). In MobileEye,
every augmented object is associated to a web service. When we want to obtain extra
information about an object or issue a command to it, we are really interacting with its
web service counterpart. In fact, we are simply invoking methods on the web services
(e.g.
MuseumWebService or DoorWebService). MobileEye is downloadable
from [6].
3.1 MobileEye Implementation
The MobileEye system presents a client/server architecture. Despite the increasing
computational capabilities of mobile phones, they are still generally
2
unsuitable for
undertaking heavy processing tasks such as image processing. This explains why in
our system, images captured by mobiles are uploaded into processing servers. Even if
the mobiles were able of processing images, MobileEye would still need to contact a
server to obtain additional information or recover the operational interfaces.
GPRS and UMTS give global access to information and allow the offload of
images to processing servers located far away from the tagged objects. More
importantly, they enable the mobiles to access the web service counterparts of the
objects, anywhere in the Internet. On the other hand, due to performance and cost
factors, it is convenient to use within controlled environments (e.g. universities or
offices) local severs accessible through PAN networks (e.g. Wi-Fi or Bluetooth). In
consequence, the MobileEye server can be accessed by co-located users via Bluetooth
and by remote users through GPRS.
Fig. 3 shows the architecture of the MobileEye system. Every item in the
environment augmented with computational functionality is tagged with a ringcode.
Jpeg images captured from tagged objects are delivered to a server. This server
2
Some latest models such as the Nokia 6600 and 6630 or the Ericsson P900 have been applied
to undertake such heavy processing tasks.
22
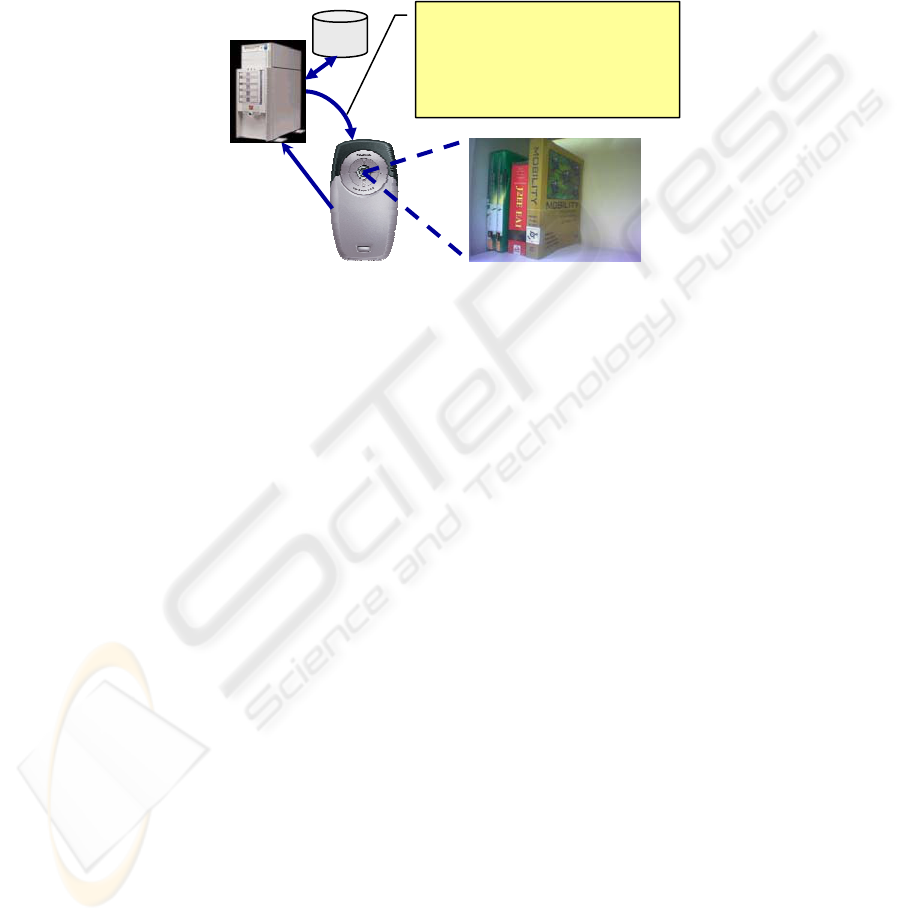
delivers responses in EnvML format, which are interpreted by the player in the
MobileEye client. EnvML is a simple XML-based language we have devised.
For the case where the mobile and the server are co-located (within Bluetooth
range of each other), the MobileEye client discovers the Bluetooth-enabled server via
Bluetooth SDP (Service Discovery Protocol) and delivers the image content via
Bluetooth RFCOMM (wireless serial port). The responses are delivered from the
server using the same mechanism.
<?xml version="1.0"?>
Fig. 3. MobileEye application architecture.
There is only one core J2EE-based implementation of the MobileEye server with
two communication channels: an HTTP and a Bluetooth one. Once an image has
been posted via HTTP or Bluetooth, the server uses the TRIP software to extract the
identifier of a ringcode. A database is used to map an identifier into a MobileEye
object, which contains a name, a description, and a URL pointing to its WSDL
interface. An XSL style sheet is applied to transform the WSDL interface into
EnvML, which is delivered to the mobile. Operations issued from the MobileEye
rendered graphical interface (obtained from the EnvML) are received via HTTP or
Bluetooth, and delegated to action JavaBeans that undertake the user commands.
The MobileEye client is MIDP 2.0 application which makes use of the MMAPI and
Bluetooth API extensions of J2ME. The EnvML player uses TinyXML to transform
the XML content received into a J2ME graphical interface.
3.2 MobileEye Performance
The MobileEye system has been tested on a Nokia 6630 device which communicates
via HTTP or Bluetooth with a 3.2 GHz Bluetooth-enabled Pentium IV with 1 Gbyte
RAM, running a Tomcat 5 application server and Blue Cove[9]. The server-side Java
implementation of TRIP was able of processing 30 160x120 pixel JPEG frames per
second. On the other hand, a Nokia 6630 was capable of sending 11 of those frames
per second to the server-side. The size of the frames delivered was on average 2208
bytes. Therefore, the effective frame transfer rate through the Bluetooth channel,
taking into account the server side acknowledgments, was around 200 Kbps. The
biggest drawback we experienced while using Bluetooth was its slow service
<EnvML>
<object>
<code>61002</code>
<name>Mobility book</name>
<desc>Book about Mobile Agents</desc>
<img>http://www.deusto.es/library?img=123 </img>
<action>http://www.deusto.es/library?book=123</action>
</object>
</EnvML>
MobileE
y
e Server
captured
image
Parsed image
response in EnvML
Code Æ
Web Service
23

discovery mechanism. Our J2ME-based Bluetooth client invested around 12 seconds
on average to discover the MobileEye Server.
4 MobileSense: Adding Senses to Mobiles
Mobile phones are turning into essential tools which assist us in our daily tasks.
Among other things, mobiles entertain us, help us to communicate with other people
and increasable serve as PDAs. Unfortunately, mobile phones are hard to use for
people with disabilities (blind, deaf) or advanced age. Thus, it is necessary to devise
solutions to offer those facilities to the people that precisely need more help.
Some companies have offered partial solutions, both software [10] and hardware
[11], to this problem. All these solutions are good but present two main problems: (1)
they are addressed to only a specific collective (blind or old people), and (2) they are
not freely available. MobileSense is a more generic solution which leverages from
open source technologies to improve the accessibility of mobile phones. It improves
MobileEye sensing capability by adding mechanisms to synthesize voice, apply OCR,
recognize colours, or even understand basic voice commands. MobileSense pursues
the following design goals: (1) be available to the widest range of currently sold
mobile phones, (2) be accessible by anybody, without focusing in a specific disability
group and (3) operate both in managed (e.g. home/office) and unmanaged
environments (street/country side).
Fig. 4. MobileSense in action.
The MobileSense implementation is available at [6]. Fig. 4 shows some snapshots
of the MobileSense client. All the multimedia processing tasks (image processing,
speech recognition, speech synthesis) are delegated to a server accessible both locally
(through Bluetooth) or remotely (GPRS and UMTS). The server leverages from a
plethora of open source utilities: (1) transforms text into voice with FreeTTS [12]
generating a WAV file as response, (2) recognises TRIP ringcodes and displays an
interface or extra information about an object, by means of EnvML, (3) undertakes
text recognition using the freely available GOCR [13], (4) undertakes colour
24

recognition using a custom-built colour recognition algorithm and (5) processes basic
voice commands through Sphinx [14].
It is interesting to mention that the OCR process incorporated within MobileSense
demands far higher image resolution than TRIP to achieve reliable results.
MobileSense, by default, operates with 160x120 pixel images, an image size which
guarantees a good overall performance of the system, but, unfortunately, yields
frames good enough to only reliably recognize banners with big fonts (see Fig. 4).
5 MoMu: the Mobile Phone as a Guiding Device
When we visit a museum we often rent a mobile device which guides us offering
additional information about the pieces of art we observe. We usually type in a
number in the device which responds with an explanation in our own language about
the artwork referred by that code. This information complements the insufficient
details usually placed in the form of a card beside the piece of art.
Fig. 5. MoMu portraying information about “The Annunciation” by Fiorentino
The MoMu (Mobile Museum) application transforms a mobile phone into a
guiding device. The communication (Bluetooth/GPRS) and multimedia (audio/video
playback) capabilities of mobiles are used to obtain enriching information about the
artworks in a museum. In each room within a museum, a local Bluetooth server offers
multimedia content about the art pieces in that location. The MIDP 2.0 based MoMu
application on the mobile uses Bluetooth discovery to detect the locally available
media server. Then, the user either selects an item from a list of pieces of art returned
by the server or points her mobile to a TRIP ringcode placed beside each piece of art.
The server identifies the piece of art selected and sends extra information about that
piece of art. Our current implementation, see Fig. 5, offers: information about the
author, detailed description of a work, audio or video content, or even links to
external websites providing more info or allowing the purchase of some related
merchandising. MoMu makes use of the MobileSense server-side infrastructure.
25

6 Related Work
Other researchers have also considered the use of Smart Phones or custom-built
wireless devices to interact with Sentient Environments. The SMILES (SMartphones
for Interacting with Local Embedded Systems) [15] project proposes the use of Smart
Phones as universal remote controllers. They define a service discovery protocol built
on top of Bluetooth SDP, an interaction mechanism to operate over the services
discovered, and a payment protocol to pay for their use. They limit to the use of
Bluetooth for service discovery and GPRS for the download of Java applications
implementing the logic that permits the interaction with the objects sensed. Our
approach can use Bluetooth, vision and even audio for sensing other devices and
services, and can operate over the services discovered via Bluetooth or GPRS.
Personal Server [16] is a small-size mobile device that stores user’s data on a
removable Compact Flash and wirelessly utilizes any I/O interface available in its
proximity (e.g., display, keyboard). Its main goal is to provide the user with a virtual
personal computer wherever the user goes. Unlike Personal Server which cannot
connect directly to the Internet, Smart Phones do not have to carry every possible data
or code that the user may need; they can obtain on demand data and interfaces from
the Internet.
CoolTown [17] proposes web presence as a basis for bridging the physical world
with the World Wide Web. For example, entities in the physical world are embedded
with URL-emitting devices (beacons) which advertise the URL for the corresponding
entities. Our model proposes web service presence and makes use of only off-the-
shelf hardware.
Rohs et al.[18] have also used the built-in cameras of consumer mobile phones as
sensors for 2-dimensional visual codes. Their matrix-shaped codes have been used to
extract the phone number from business cards on which their barcodes are printed.
They suggest to use these codes in public displays in airports or train stations so that
they can direct customers to on-line contact just by retrieving the url associated to
each code. Our solution has the same barcode recognition functionality but it also
adds other sensing capabilities and is not only a client-side solution.
7 Conclusions
This work has illustrated how the interactions with our environment can be facilitated
significantly by means of our mobile phones. Smart Phones can sense what other
devices or services are around and present us with additional information about them
or interfaces that enable us to operate over those objects. Our adaptation of a mobile
phone into a sentient device has enabled us to interact in a more natural way with
objects which otherwise we would have not considered augmenting with
computational services, such as a door or a painting. Moreover, our work permits
people with disabilities (blind, deaf) [19] to also make use of a mobile phone. The
MoMu system applies the MobileSense concept to a museum, enabling a user to
interact through her mobile with the artworks and so obtain extra information about
26

them. As future work we are planning to apply the MobileSense infrastructure in the
development of sentient services for outdoor environments.
Acknowledgements
This work has been partly financed by the Catedra de Telefónica Móviles at
University of Deusto, Bilbao, Spain. The work on the TRIP sensor was carried out at
the Laboratory for Communications Engineering, University of Cambridge, UK.
References
1. Shadbolt N. Ambient Intelligence. IEEE Intelligent Systems, July/August 2003 (2003) 2-3
2. Weiser M. The Computer for the 21
st
Century. Scientific American, (1992) vol. 265, no. 3,
pp. 94-104.
3. Bluetooth. http://www.bluetooth.org/.
4. Hopper, A. The Clifford Paterson Lecture, 1999 Sentient Computing. Philosophical
Transactions of the Royal Society London, vol. 358, no. 1773, pp. 2349-2358, August
2000.
5. Hightower J., Borriello G. Location Systems for Ubiquitous Computing. IEEE Computer
2001; 34(8): 57-66
6. López de Ipiña D., Mendonça P. and Hopper A. TRIP: a Low-Cost Vision-Based Location
System for Ubiquitous Computing.
Personal and Ubiquitous Computing, Springer, vol. 6,
no. 3, pp. 206-219, May 2002. Software downloadable at: http://www.ctme.deusto.es/trip
7. Java 2 Platform, Micro Edition (J2ME). http://java.sun.com/j2me/
8. Symbian OS: The Mobile Operating System. http://www.symbian.com/
9. Blue Cove: An open source implementation of the JSR-82 Bluetooth API for Java,
http://sourceforge.net/projects/bluecove/
10. TALKS for Series and Nokia Communicator, http://www.talx.de/index_e.shtml, 2004
11. OWASYS 22C y 112C, http://www.owasys.com/index_en.php, 2004
12. FreeTTS 1.2beta2, http://freetts.sourceforge.net/docs/index.php, 2004
13. Schulenburg J., GOCR, http://jocr.sourceforge.net, 2004
14. Walker w. et al., Sphinx-4: A Flexible Open Source Framework for Speech Recognition,
http://cmusphinx.sourceforge. net/sphinx4/doc/Sphinx4Whitepaper.pdf, 2004
15. Iftode L, Borcea C., Ravi N., Kang N., and Zhou P. Smart Phone: An Embedded System
for Universal Interactions, Proceedings of 10th International Workshop on Future Trends in
Distributed Computing Systems FTDCS (2004).
16. Want R., et al. The Personal Server: Changing the Way We Think about Ubiquitous
ComputingIn Proceedings of Ubicomp2002, pp. 194–209. Springer LNCS, September
2003.
17. Kindberg T., Baron J., et al. People, places, things: Web presence for the real world. 3
rd
IEEE Workshop on Mobile Computing Systems and Applications, December 2000.
18. Rohs M., Gfeller B., Using Camera-Equipped Mobile Phones for Interacting with Real-
World Objects. Advances in Pervasive Computing, Austrian Computer Society (OCG),
ISBN 3-85403-176-9, pp. 265-271, Vienna, Austria, April 2004
19. López de Ipiña et al. Accesibilidad para Discapacitados a través de Teléfonos y Servicios
Móviles Adaptables. JANT 2004, Bilbao, SPAIN, Diciembre 2004.
27
