
ULTRASONIC SENSORS FOR THE ELDERLY AND CAREGIVERS
IN A NURSING HOME
Toshio Hori
Digital Human Research Center, National Institute of Advanced Industrial Science and Technology & CREST, JST.
2-41-6, Aomi, Koto-ku, Tokyo 135-0064, JAPAN
Yoshifumi Nishida
Digital Human Research Center, National Institute of Advanced Industrial Science and Technology & CREST, JST.
2-41-6, Aomi, Koto-ku, Tokyo 135-0064, JAPAN
Keywords:
Intelligent nursing home, ultrasonic 3D tag system, location awareness.
Abstract:
Workloads on caregivers in nursing home are increasing as the imbalance between the number of elderly
people and that of caregivers becomes larger. Excessive workloads on caregivers must be reduced not only
because they become burdens for caregivers but also because they deteriorate the quality of nursing care. One
of such workloads is routine patrol for monitoring the status of the elderly and for detecting accidents on the
elderly as soon as possible. If the number of unnecessary patrols is minimized, caregivers will be able to spend
their time on high touch care and humane communication. The authors have been developing an ultrasonic 3D
tag system which locate ultrasonic tags in real time, and employed the system in a nursing home to monitor
positions of the elderly people. If the system locates the elderly people continuously and robustly, and if it
can notify caregivers about the occurrence of accident-prone activities promptly, caregivers will be releaved
from their unnecessary workloads. This paper describes the research background, system overview, system
implementations, and experimental results.
1 INTRODUCTION
The world has been rapidly aging during the last few
decades and it is projected that this trend will con-
tinue for several more decades. Aging of population
has become one of the most serious and urgent prob-
lems that almost all the countries are facing and must
tackle. Problems incurred by aging are not only the
problem of decreasing working populations but also
the problem related to the shortage of caregivers for
elderly people. The number of the elderly of whom
each caregiver takes care in nursing homes is certainly
increasing and the imbalance between the number of
the elderly and that of caregivers will deteriorate the
quality of nursing care.
In nursing home, caregivers patrol the entire home
regularly to prevent the elderly from meeting with se-
rious accidents and, even if they have accidents, to de-
tect occurrence of accidents promptly. Besides such
patrolling, caregivers must often visit nursing rooms
where nurse calls sounded from to take care of inhab-
itants. The number of caregivers is usually much less
than that of the elderly so they are very busy taking
care of the elderly. There is an overwhelming need
for alleviating such workloads on caregivers.
On the other hand, the authors are involved in re-
search on “human behavior modeling”(Hori, 2001;
Nishida et al., 2004) and have been developing an en-
vironment in which a system observes inhabitants and
recognizes their behaviors(Kitamura et al., 2004). By
installing such observation system into elderly care
homes, we believe that the system can recognize the
behaviors of elderly people and provide some useful
support for caregivers. To be concrete, if the system
can detect accident-prone activities of the elderly be-
forehand and notify caregivers of the occurrence, their
excessive patrols for detecting accidents or accident-
prone activities will be minimized and, consequently,
caregivers will be able to spare their time for high
tough care for and humane communication with the
elderly.
This paper introduces an ultrasonic sensor system
for a nursing home. The system uses ultrasonic sen-
sors to observe activities of the elderly people in a
nursing room. The system is composed of two sub-
systems, a wheelchair locator subsystem and an ultra-
sonic radar subsystem; the former works for tracking
position of a wheelchair which an elderly person uses
and the latter monitors human head’s position on and
around bed. When these two subsystems work coop-
110
Hori T. and Nishida Y. (2005).
ULTRASONIC SENSORS FOR THE ELDERLY AND CAREGIVERS IN A NURSING HOME.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 110-115
DOI: 10.5220/0002556201100115
Copyright
c
SciTePress

eratively, activities of the elderly in a nursing room are
monitored continuously and remotely without invad-
ing his/her privacy, so their accidents will be avoided
or minimized if the system can recognize and notify
the accident-prone activities to caregivers beforehand.
This paper is organized as follows: Section 2
presents several works related to location systems and
support technologies. Secondly, Section 3 describes
background of the system and outline of the system,
briefly. Then Section 4 presents the system imple-
mentations and several experimental results and, fi-
nally, Section 5 concludes this paper.
2 RELATED WORKS
Concerning location systems and their technologies,
Hightower and Borriello presented a good survey and
taxonomy in IEEE Computer(Hightower and Bor-
riello, 2001).
The Active Bat system(Harter et al., 1999) devel-
oped at AT&T Cambridge is the system which is al-
most same to ours. The system uses ultrasonic emit-
ters, Active Bats, and a grid of ceiling-mounted ultra-
sonic receivers. Bats are attached to objects or per-
sonnel and their positions are computed with the ac-
curacy of approximately 3cm.
The Cricket Location Support System(Priyantha
et al., 2000) takes the opposite approach. In this
system, ultrasonic emitters are installed in the envi-
ronment and receivers are embedded in the objects.
So triangulation computation is performed on the ob-
jects’ side and, therefore, privacy of humans who have
objects is not invaded.
As for support technologies, many interesting arti-
cles are posted in IEEE Pervasive Computing.
Stanford introduced an elder care home, the Oat-
field Estates(Stanford, 2002). The home had em-
ployed IR and RF wireless communication technolo-
gies not only for surveillance but also for monitoring
health condition of the elderly.
The CareMedia project is an on-going research
project at CMU(Hauptmann et al., 2004). They in-
stalled four cameras and microphones in a nursing
home in Pittsburgh and recorded video images over a
week in their preliminary study. Analyzing the video,
they tried to track the elderly’s movement and to ex-
tract their activities in the nursing home.
SIMBAD (Smart Inactivity Monitor using Array-
Based Detectors) is a sensor system developed by Six-
smith(Sixsmith and Johnson, 2004). They utilize IR
sensor arrays as thermal imaging detectors to observe
(in)activities of inhabitants.
Similar systems are too numerous to mention. We
believe that this is because these support technologies
are getting a lot of attention all over the world.
TouchSensor
FloorMat
Sensor
(a) Touch sensor on a
handrail of a bed
(b) Floor mat sensor at
bedside
Figure 1: Sensors used in a nursing home
3 ULTRASONIC SENSOR
SYSTEM FOR ELDERLY CARE
HOMES
This section firstly presents the background of this
project. Then the Ultra Badge System developed by
the authors is introduced briefly and, lastly, we outline
our proposed system for elderly care homes.
3.1 Background of the Project
The authors started the “Sensorized Elderly Care
Home” project in the mid-summer of 2003 and have
been implementing a system which reduces work-
loads on caregivers using a sensor network. This is
a cooperative project with a nursing home in Tokyo.
To begin with, we interviewed caregivers of the
nursing home and categorized accidents of the elderly
into the following two cases:
1. Falls—Users of wheelchair or walker tend to fall
down when they transfer from their wheelchair/
walker to their bed or a toilet seat and vice versa.
2. Wanders—Elderly people who suffer from senile
dementia, such as Alzheimer’s disease, tend to
wander around day and night.
To detect these accidents, several kinds of contact-
type sensors are already used in the nursing home. For
example, touch sensors (Figure 1(a)) were attached to
handrails of beds and floor mat type pressure sensors
(Figure 1(b)) were put at bed side. Both sensors had
been used for detecting the elderly falling down from
his/her bed or trying to sneak out of the bed. However,
those sensors had little effect on preventing accidents
from occurring because: (1) the elderly, though suf-
fering from senile dementia, often learn how to escape
being detected by the sensors, (2) the sensors often
emit false alarms when, for example, a person turns
over and touches the sensor by chance while sleeping,
and (3) the sensors detect the occurrence of accidents
but cannot prevent accidents from occurring even if
they work correctly.
ULTRASONIC SENSORS FOR THE ELDERLY AND CAREGIVERS IN A NURSING HOME
111

(a) Tiny type (1×1×2cm;
comparison with an US
cent coin)
(b) Long life battery type
(Active for 2mon. with
Li-Ion battery)
Figure 2: Variety of Ultra Badges
According to the caregivers, more than 85% of the
residents are suffering from senile dementia so they
cannot expect the residents to put on any devices.
Therefore, we have to monitor the elderly without
putting any devices on their bodies. And, moreover,
cameras are unacceptable because they may invade
the privacy of the elderly.
3.2 The Ultra Badge System
The authors have been developing an ultrasonic 3D
tag system(Nishida et al., 2004; Hori et al., 2003)
which tracks positions of multiple ultrasonic tags con-
tinuously for monitoring human behaviors. We call it
Ultra Badge System.
The Ultra Badge System consists of ultrasonic re-
ceivers embedded in the environment and wireless
small ultrasonic emitters. We named the emitter Ul-
tra Badge. Figure 2 shows two types of Ultra Badges
developed by the authors. The left picture is a tiny
type whose size is 1cm×1cm×2cm, and the right one
is a long life battery type which uses a Li-Ion battery
of mobile phone and is active for two months using
sleep mode.
By embedding many receivers whose 3D positions
are known beforehand in an environment, the system
can obtain a badge’s position from distance data using
multi-lateration technique. Experiments conducted in
our laboratory exhibited that the accuracy of position
estimation was about 20 to 80mm and the resolution
was about 15mm in horizontal directions and about
5mm in vertical direction by using a robust estimator,
RANSAC(Fischler and Bolles, 1981).
3.3 Outline of the Ultrasonic Sensor
System for Detecting Falls in a
Nursing Home
From the interview with caregivers, we summarized
the targets of our sensor system as follows:
• The system prevents falls from occurring in the
nursing home,
Detection
Areas
Ultrasonic
Signalfor
Locator
Ultrasonic
Signalfor
Radar
Ultrasonic
Receivers
Network
Ultrasonic
Emitters
Nurse
Call
Figure 3: Schematic diagram of the Ultrasonic Sensor Net-
work System for a nursing home
• The system monitors beds, bedsides and the side of
toilet seats because the locations where falls occur
are relatively limited to those places,
• The system monitors the elderly remotely and does
not expect them to put any devices on their bodies,
• The system expects the elderly to use wheelchairs
or walkers,
• The system uses an existing nurse call system to
send alarms to caregivers when it detects accident-
prone activities, and
• The system must respect and must not invade the
privacy of the elderly.
We designed an Ultrasonic Sensor Network System
for the Nursing Home based on the above consider-
ations. Figure 3 is a schematic diagram of the sys-
tem. The system consists of (1) embedded ultrasonic
receivers, (2) embedded/wireless ultrasonic emitters
(Ultra Badges) and (3) a sensor network which con-
nects receivers and emitters. In addition to these main
components, the system uses a synchronous signal
generator to synchronize the emitters/receivers inter-
nal timers, an RF transmitter to activate wireless emit-
ters, and a PC for data processing.
The system is composed of two subsystems: wheel-
chair locator and ultrasonic radar. The wheel-
chair locator subsystem uses Ultra Badges attached
to wheelchairs to monitor their position remotely and
the ultrasonic radar subsystem uses ultrasonic emit-
ters embedded in the ceiling to monitor activities of
the elderly on their beds. The subsystems are con-
nected to a nurse call system and they call caregivers
whenever they detect predefined events leading to ac-
cidents. Details of these subsystems are described in
Section 4.
In this system, information transmitted through
the air is wireless emitters’ IDs only, and ultrasonic
pulses sent from any emitters do not carry any infor-
mation on the individuals being monitored. The sys-
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
112

Ultrasonic
Receivers
Ultrasonic
Receiver
Ultrasonic
3D Tag
Figure 4: Ultrasonic receivers on the ceiling Figure 5: Enlarged view of a
receiver
Figure 6: A wheelchair and an Ul-
tra Badge attached
tem does not collect unnecessarily rich information,
such as the images taken by cameras. We can there-
fore conclude that the level of privacy invasion is min-
imized in this ultrasonic sensor network system.
4 IMPLEMENTATIONS OF THE
SYSTEM AND EXPERIMENTAL
RESULTS
This section presents a wheelchair locator subsystem
and an ultrasonic radar subsystem in detail. The aim
of the former subsystem is to detect the wheelchair
approaching one of areas where falls are likely to oc-
cur and the aim of the latter is to detect the elderly
getting up and going out of their beds.
4.1 Wheelchair Locator Subsystem
The authors installed the Ultra Badge System for
monitoring positions of a wheelchair in one room of
the nursing home. We embedded 99 ultrasonic re-
ceivers on the ceiling of the room. Appearance of the
ceiling and an enlarged view of a receiver are shown
in Figure 4 and 5, respectively. All the other appara-
tus are hidden behind the ceiling so the room looks
the same as the other rooms except for the ceiling.
An Ultra Badge was attached to the wheelchair that
the subject of this experiment uses. Figure 6 shows
the wheelchair and an Ultra Badge attached to the
back of the seat. The system activates the badge at
5 Hz and tracks its position continuously.
In the room, we defined detection areas in front of
the bed that the subject uses and at the entrance of
a toilet. The subsystem is connected to a nurse call
system and, when it detects the wheelchair entering
one of the areas, it notifies caregivers that the subject
is approaching the place where accident is likely to
occur. Though we have not measured the time from
the nurse call alarm to caregivers’ arrival, it seems that
Toilet
Wash-
stand
Bed
Bed
Bed
Bed
Figure 7: Trajectory of the wheelchair
both the position of detection areas and the timing of
alarm work for caregivers to support the subject.
4.2 Experimental Results of the
Wheelchair Locator Subsystem
This subsystem has been running since January, 2004,
and taking logs of wheelchair’s position. Figure 7 is
its trajectory obtained during the operation. The line
segments are the trajectory and purple dots are the re-
ceivers’ positions on the ceiling. Yellow and blue rec-
tangles indicate bed positions and detection areas, re-
spectively. The subject uses the lower-left bed so we
preset the detection areas in front of the bed and at the
entrance of the toilet.
This experimental data was obtained from 8:00AM
to 10:00AM on Aug. 15th, 2004 and, according to the
log, the system correctly sent alarms when the wheel-
chair got into either detection area. So we may say
that the system was almost working fine.
ULTRASONIC SENSORS FOR THE ELDERLY AND CAREGIVERS IN A NURSING HOME
113
250
200
345
250
250
75
250
220
900
1800
1200
receiver
transmitter
Ultrasonic Radar
Figure 8: Ultrasonic emitters/receivers on the ceiling
During the operation, the system detected the other
events that even caregivers did not know at all. One
of such events that the system disclosed was the fol-
lowing:
In one night, the system sent alarms several
times so a caregiver went to the nursing room to
find that the subject was going to the toilet with
her wheelchair.
The contact-type sensors used for the subject could
not have detected such events at all so no caregivers
had thought the subject went out of bed in the night.
But, with the assistance of this system, they found that
the subject had symptoms of frequent urination.
Such sneaking out could not be detected with a
wearable-type device if the subject (deliberately) for-
got to put the device on. Cameras could have detected
the events if their installation was permitted in the
nursing room, but they need someone to keep watch-
ing all monitors to detect such events. So we are con-
fident that this is a good example which exhibits the
effectiveness and the superiority of our system.
4.3 Ultrasonic Radar Subsystem
The wheelchair locator subsystem is a system to lo-
cate wheelchair so, theoretically, it cannot detect the
activity of the elderly on their beds. But, of course,
falls from bed must also be avoided and we need to
monitor the activity on beds to detect such accidents.
So we developed this ultrasonic radar subsystem.
The subsystem comprises several ultrasonic emit-
ters and receivers embedded on a ceiling. The sub-
system activates emitters one by one and measures
time-of-flight of ultrasonic pulses, just the same as the
wheelchair locator subsystem. When the system ob-
tains the distance data, the reflection point is located
on a spheroid whose foci are the emitter and the re-
ceiver. So the position of the reflection point is cal-
culated by solving simultaneous equations of at least
three spheroids.
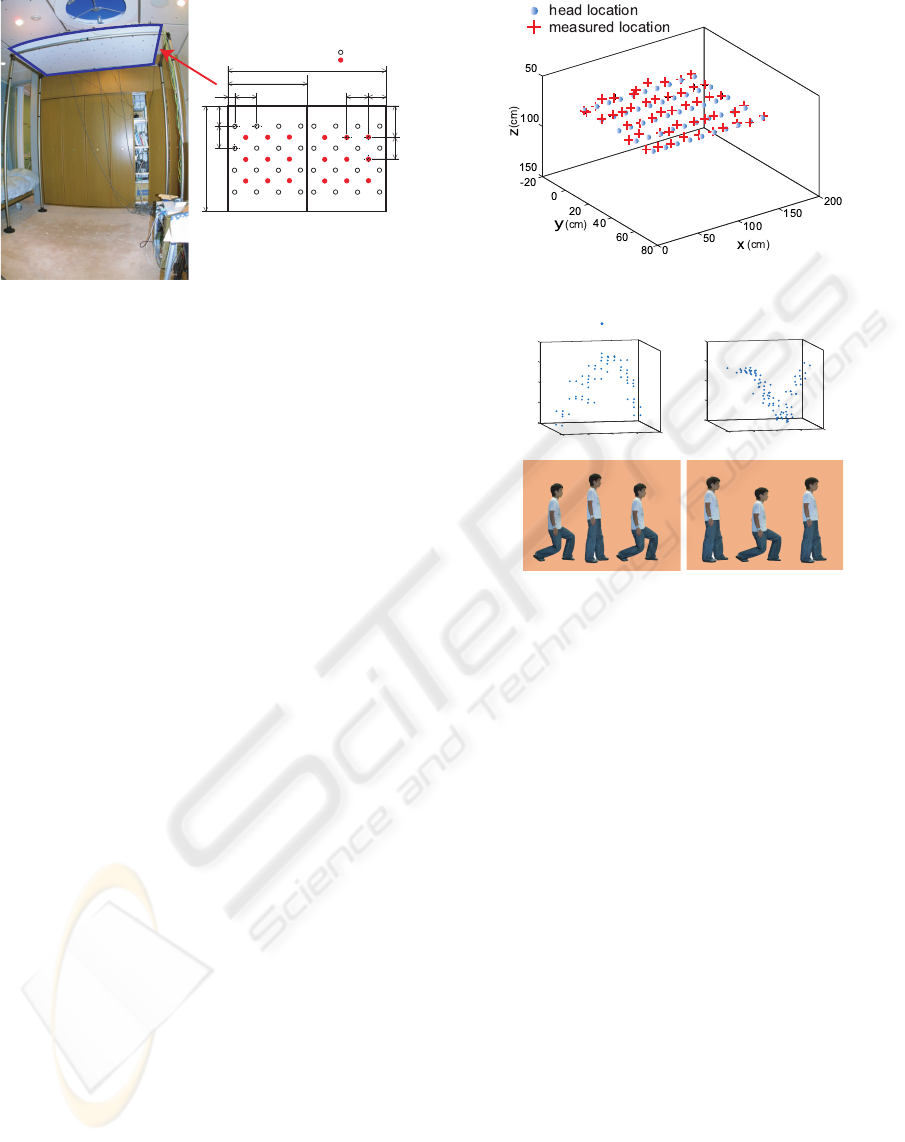
Figure 9: Evaluation of localization accuracy of human
head
x[cm]
y[cm]
z[cm]
0
200
100
50
150
0
80
40
130
140
150
160
170
location of a human head
x [cm]
y [cm]
z [cm]
0
200
100
50
150
0
80
40
130
140
150
160
170
Figure 10: Tracking a head of moving human
Figure 8 depicts our experimental setup. In this
setup, we set 18 ultrasonic emitters and 32 receivers
on a panel, and placed it as a ceiling at 230 cm height
from the floor level. In this experimental system, the
sampling frequency is 1 Hz, i.e. every emitter is acti-
vated every one second in turn.
This subsystem is still under development and is
not installed in the nursing home. So the experimental
results presented in the next subsection were obtained
by this experimental setup.
4.4 Experimental Results of the
Ultrasonic Radar Subsystem
The accuracy of localization was measured to eval-
uate the ability to detect the human head location.
Figure 9 shows the results, where the blue dots and
the red crosses indicate true positions of the head and
positions measured by the subsystem, respectively.
All the distance errors between corresponding points
were within 5 cm so we think that the system has suf-
ficient accuracy to locate human head.
As the subsystem calculates the reflection point pe-
riodically, it can obtain a trajectory of a human head,
though the resolution is not so precise because of the
sampling rate. Figure 10 illustrates the tracking re-
sults. The upper parts show the trajectories when the
subject moved as shown in the lower parts.
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
114

Figure 11: Coordination of the wheelchair locator subsys-
tem and the ultrasonic radar subsystem
4.5 Integration of Two Subsystems
When these two subsystems work cooperatively, they
can monitor the activities of the elderly on beds and
in the room. We integrated them into an experimen-
tal system shown in Figure 11. The figure illustrates
an example of cooperation of two subsystems. In the
figure, a person is sitting on a bed and transferring to
a wheelchair. The red rectangle indicates the position
of his head and the white cross indicates the position
of the Ultra Badge attached to the wheelchair.
One of the advantage of this integration is that
both subsystems use the same ultrasonic technology;
that is, installing a large-scale ultrasonic sensor net-
work system suffices both subsystems’ requirements.
The total system is expected to work for detecting
accident-prone activities and for preventing accidents
from occurring in a nursing home.
5 CONCLUSIONS
This paper presented an ultrasonic sensor network
system for nursing homes. We developed two subsys-
tems. The wheelchair locator subsystem was installed
in a nursing home and has been running successfully.
The ultrasonic radar subsystem is still under develop-
ment but will be installed in the nursing home soon as
its experimental results satisfied our requirements.
The authors think that accidents on the elderly will
be avoided or minimized when both subsystems work
cooperatively; i.e., the total system monitors the el-
derly, recognizes accident-prone activities and noti-
fies their occurrence to caregivers beforehand. If this
sensor network system works in place of caregivers,
their workloads are alleviated and they will be able to
spare their time for high touch care for the elderly.
The authors believe that nursing homes will be
fully sensorized in the near future.
ACKNOWLEDGMENT
The authors wish to express our great gratitude to Mr.
Yuichi Motomura at the nursing home Aizenen for his
great help on conducting this project. We express our
appreciation to Mr. Hiroshi Aizawa and Mr. Shin’ichi
Murakami for their fruitful research results.
REFERENCES
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with app li-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Harter, A., Hopper, A., Steggles, P., Ward, A., and Webster,
P. (1999). The anatomy of a context-aware applica-
tion. In Proceedings of the 5th Annual ACM/IEEE
International Conference on Mobile Computing and
Networking, pages 59–68.
Hauptmann, A. G., Gao, J., Yan, R., Qi, Y., Yand, J., and
Wactlar, H. D. (2004). Automated analysis of nursing
home observations. Pervasive Computing, 3(2):15–
21.
Hightower, J. and Borriello, G. (2001). Location systems
for ubiquitous computing. Computer, 34(8):57–66.
Hori, T. (2001). Overview of digital human modeling. In
Tutorial Note, Workshop on “Digital Human Model-
ing”at the IEEE/RSJ International Conference on In-
telligent Robots and Systems 2001.
Hori, T., Nishida, Y., Kanade, T., and Akiyama, K. (2003).
Multi-lateration for multiplexed ultrasonic sensors. In
Proceedings of the 2nd IEEE International Confer-
ence on Sensors, pages 1219–1224.
Kitamura, K., Nishida, Y., Kimura, M., and Mizoguchi, H.
(2004). Real world sensorization and virtualization
for observing human activities. In Proceedings of the
6th International Conference on Enterprise Informa-
tion Systems 2004, volume 5, pages 15–20.
Nishida, Y., Kitamura, K., Hori, T., Nishitani, A., Kanade,
T., and Mizoguchi, H. (2004). Quick realization of
function for detecting human activity events by ultra-
sonic 3d tag and stereo vision. In Second IEEE Inter-
national Conference on Pervasive Computing, pages
43–54.
Priyantha, N. B., Chakraborty, A., and Balakrishnan, H.
(2000). The cricket location-support system. In Pro-
ceedings of the 6th Annual International Conference
on Mobile Computing and Networking, pages 32–43.
Sixsmith, A. and Johnson, N. (2004). A smart sensor to
detect the falls of the elderly. Pervasive Computing,
3(2):42–47.
Stanford, V. (2002). Using pervasive computing to deliver
elder care. Pervasive Computing, 1(1):10–13.
ULTRASONIC SENSORS FOR THE ELDERLY AND CAREGIVERS IN A NURSING HOME
115
