
JOB SCHEDULING IN COMPUTATIONAL GRID USING
GENETIC ALGORITHMS
Mohsin Saleem, Savitri Bevinakoppa
School of Computer Science and Information Technology, RMIT Univeristy, Mlebourne,Australia
Keywords: Grid Computing, Schedu
ling, Genetic Algorithms
Abstract: The computational Grid is a collection of heterogeneous computing resources connected via networks to
provide computation for the high-performance execution of applications. To achieve this high-performance,
an important factor is the scheduling of the applications/jobs on the compute resources. Scheduling of jobs
is challenging because of the heterogeneity and dynamic behaviour of the Grid resources. Moreover the jobs
to be scheduled also have varied computational requirements. In general the scheduling problem is NP-
complete. For such problems, Genetic Algorithms (GAs) are reckoned as useful tools to find high-quality
solutions. In this paper, a customised form of GAs is used to find suboptimal schedules for the execution of
independent jobs, with no inter-communications, in the computational Grid environment with the objective
of minimising the makespan (total execution time of the jobs onto the resources). Further, while using the
GA-based approach the solution is encoded in the form of chromosome, which not only represents the
allocation of the jobs onto the resources but also specifies the order in which the jobs have to be executed.
Simple genetic operators i.e., crossover and mutation are used. The selection is done on the using
Tournament Selection and Elitism strategies. It was observed that the specification of order of the jobs to be
executed on the Grid resources played a significant role in minimising the makespan. The results obtained
from the experiments performed were also compared with other heuristics and the GA-based approach by
other researchers for job-scheduling in the computational Grid environment. It was observed that the GA-
based approach used in this paper was able to achieve much better performance in terms of makespan.
1 INTRODUCTION
The objective of scheduling is to minimise the
execution time of the jobs on the Grid resources and
to balance the load across the resource as much as
possible. The scheduling techniques depend heavily
on the nature of the jobs to be scheduled. Jobs can
be independent or dependent on each other.
Independent jobs may require an input file and can
execute in any sequence according to their resource
requirements. In the case of dependent jobs, the
results are communicated to other jobs as inputs and
this communication pattern can be represented using
task graphs. The scheduling of both kind of jobs
mentioned above, can be static or dynamic. In the
case of static scheduling all the job requirements and
the information about the resources in the Grid are
already known before applying the scheduling
technique. However in the case of dynamic
scheduling, assumptions about the jobs and
performance predictions about the Grid resources
are used to take scheduling decisions at run time of
the jobs. This paper addresses the static scheduling
problem of the independent jobs in the Grid
computing environment.
The scheduling problem is NP-complete
(
H
achbaum, 1997), so many heuristics have been
suggested to find an optimal solution to this problem
in the Grid computing environment (Casanova et al,
2000). In this paper a simple form of GAs is applied
to the scheduling problem in the Grid computing
environment. Special chromosome representations
are used to produce the schedules, which then help
in minimising the makespan (total execution time of
the jobs onto the resources) and assist in balancing
the load on resources.
2 PROPOSED SOLUTION
This model contains an information keeper, which
provides information about the jobs to be scheduled
as well as the resources in the Grid. Jobs are
163
Saleem M. and Bevinakoppa S. (2005).
JOB SCHEDULING IN COMPUTATIONAL GRID USING GENETIC ALGORITHMS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 163-169
DOI: 10.5220/0002537501630169
Copyright
c
SciTePress
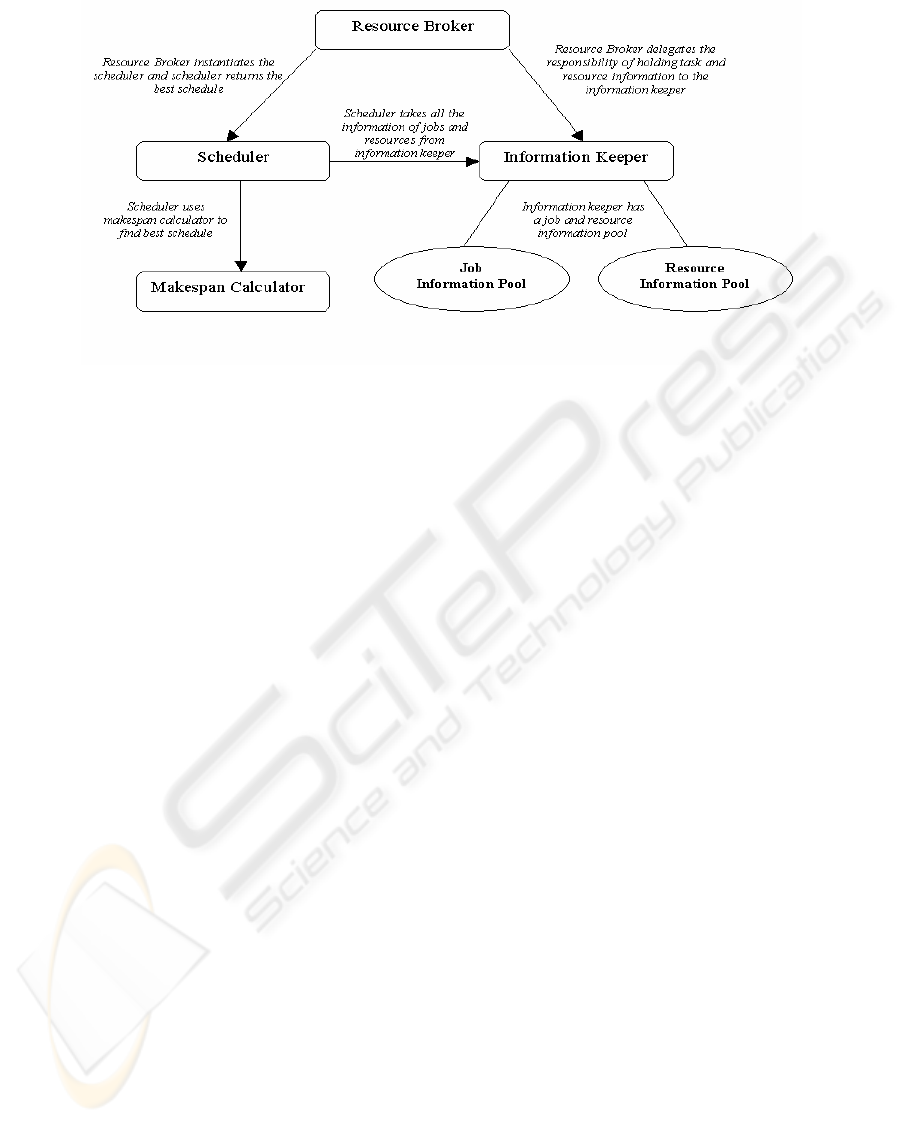
Figure 1: Proposed Model
specified by a number of requirements such as
required computing power, total execution time,
required architecture, required operating system, and
size and location of data input file. The users of the
Grid submit jobs to a resource broker. The resource
broker uses the information from the information
system and the jobs’ requirements as submitted by
the users to generate a schedule.
To create a schedule, the resource broker will ask
the scheduler component to find an appropriate
schedule based on the information of jobs and
resources. The scheduler can use any algorithm to
produce a schedule. The scheduler makes use of the
makespan calculator component, which estimates
the total run time of the schedule. The purpose of the
scheduler is to produce a schedule with a minimum
makespan. The makespan includes not only the
execution time of the jobs but also the data transfer
time for the input files.
A customised implementation of Simple Genetic
Algorithms (Holland, 1975) is used in this paper to
create a schedule for independent jobs to run on the
Grid resources with the objective of minimising the
makepsan. A random method is used to create initial
population of schedules and then applied standard
genetic operators to produce new schedules. Two
forms of chromosome representation are used and
the results are compared. First form only considers
the allocation of jobs on the resources. The second
form considers the order of the jobs on each resource
along with the allocation of jobs on the resource.
Single-point, two-point, uniform and cycle
crossovers are used for reproduction of individuals.
The selection is based on tournament selection
(Srinivas et al, 1994) technique. Elitism (Mitchell,
1996) is also used to make sure that the best
chromosome remains in the population. Scheduling
with GAs has been proved a good tool for providing
very good solutions to large scheduling problems.
The use of a simple model reduces the complexity of
the solution and makes it easier to integrate the
solution into the other models.
The application model chosen for this study was
that of independent jobs with no communication
between them. This means that the jobs have no
precedence constraints and can be scheduled in any
possible order. The performance criterion was to
reduce the makespan of the schedule. The GAs
provide a flexible framework for this kind of
scheduling problems; in this work a customised form
of GAs is used. The main focus of the paper is on
the scheduling using GA, so few assumptions were
made regarding the information about the jobs and
the resources. The details of the solution architecture
and the implementation of GA used for the
scheduling are presented below. Every job in the job
pool gets unique identification number Job ID,
Resource ID in XML format.
3 GA SCHEDULER
ARCHITECTURE
The model used to solve the scheduling problem is
given in Figure 1.
The model used consists of following basic
components:
3.1 Resource Broker
The resource broker is responsible for getting
requests for resources to allocate jobs on them. The
resource broker, with the help of the information
keeper component obtains the job requirements for
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
164
the resources. This component is not only
responsible for allocation of jobs on the resources
but also for monitoring their progress and returning
the results to the user(s).
Once the information has been updated in the
information keeper component, the resource broker
asks another component called scheduler to use this
information and come up with a good schedule. The
good schedule in this paper is the one that helps in
finishing the job execution on the resources as early
as possible and keeps a balance of the load on the
resources at the same time.
3.2 Information Keeper
The information keeper is responsible for keeping
the information about the resources and the jobs to
be allocated on those resources. It contains two sub-
components called job information pool and
resource information pool.
The information keeper stores the information
about the jobs in the job information pool. The
resource information pool is updated when the
resource broker has to allocate job to the feasible
resources. This information can be obtained from
services such as MDS-2 (Zhang et al, 2004) (a part
of Globus toolkit (Foster et al, 1998)) or NWS
(Lowekamp, 1999).
3.3 Scheduler
This component is instantiated by the resource
broker once the information has been collected by
the information keeper. The scheduler assumes that
all the information in the job information pool and
the resource information pool of the information
keeper is the latest and builds a good schedule based
on that information.
In this paper, a Genetic algorithm based approach
is used to find a good schedule. In GAs the new
generation of solutions go through an evaluation
process. The scheduler component evaluates the
schedules produced using information from the
information keeper. The best schedule made by the
scheduler is returned to the resource broker.
3.3.1 Unordered Schedule
In one implementation of the scheduler, the schedule
is produced without any specification of the order in
which jobs have to be executed. The order is
determined by the resource on which jobs have to
run. Here we assume that when the scheduler does
not specify the order the jobs run on the resource in
a First Come First Served (FCFS) fashion.
3.3.2 Ordered Schedule
In the other implementation of the scheduler, the
order of the jobs on the resources is also specified.
By specifying order, makespan can be minimised. If
jobs 1, 2 and 3 are allocated on a resource, allocating
them in a different order affects the total execution
time. It is assumed that the resources can run jobs in
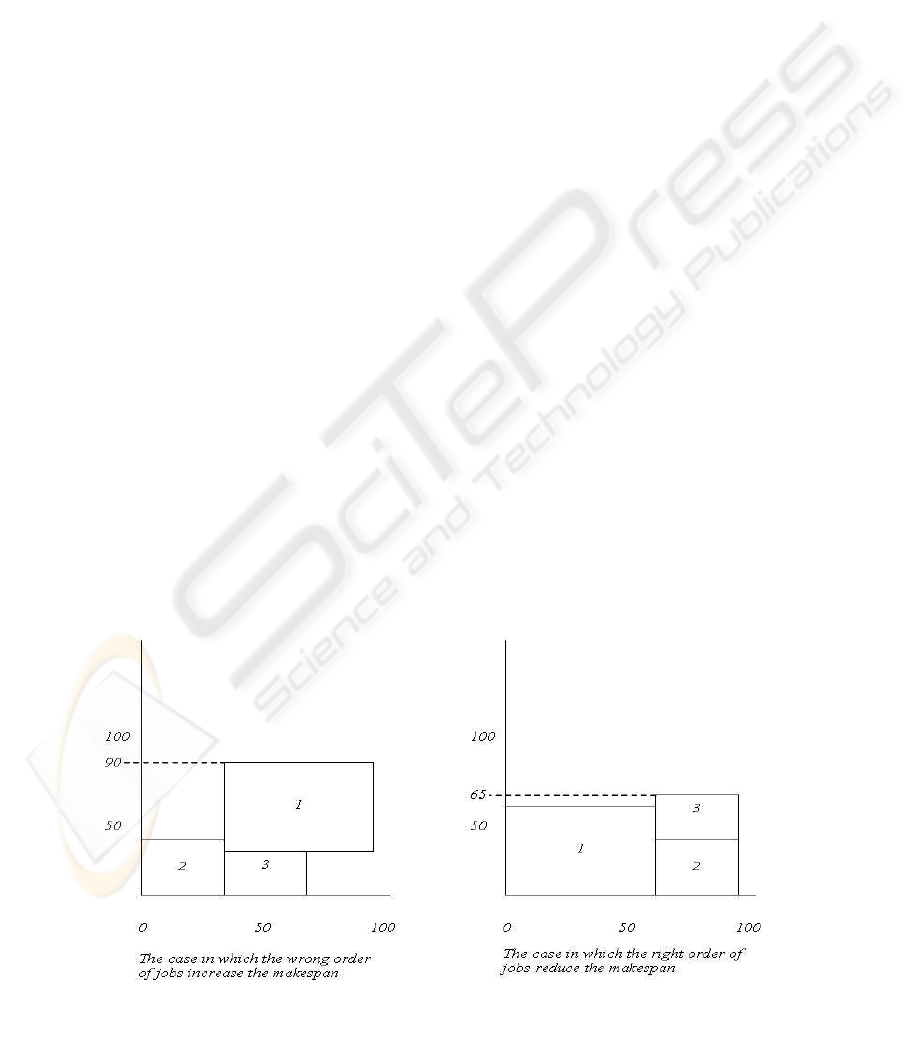
parallel. In the example shown in Figure 2, the
computing power is shown on the horizontal side of
the graph and time spent to execute the job is shown
on the vertical side. In the first case, job 2 and 3 are
allocated first in parallel. Job 1, which is a slightly
larger job has to wait until job 3 finishes execution,
thus increasing the makespan. In the other case if job
1 is allocated first with job 2 running in parallel, job
3 can start execution in parallel with job 1 when job
2 is over. This reduces the makespan significantly as
shown in Figure 2
.
Figure 2: Example to show how order affect the makespan
Job Scheduling in Computational Grid using Genetic Algorithm
165

3.3.3 Makespan Calculator
A makespan calculator is used by the scheduler to
calculate the makespan of a schedule produced. It
virtually allocates the jobs on the resources as
specified by the schedule and returns the makespan.
To get information about the jobs and the resources
the makespan calculator contacts the information
keeper, whenever it needs it. The scheduler uses this
makespan to determine how good or bad is the
schedule produced.
Figure 4: Chromosome with mapping and sequence strings
4 GENETIC ALGORITHMS
BASED APPROACH FOR
SCHEDULING
4.1 Chromosome Representation
In this paper, two representations of chromosomes
have been used, the first representation considers the
assignment of jobs on the resources while the other
considers the order of jobs on the resources as well.
In the first representation, the chromosome consists
of a string where the positions in the string represent
the jobs to be scheduled and the value at each
position represents the resource on which job has to
be executed. This string is termed a mapping string
as it gives mapping of jobs on the resources. In this
case the order of jobs on the resources is not
considered and is left to the resource to decide the
order as shown in Figure 3.
In the second representation, another string is
used in addition to the mapping string to consider
the order of jobs to be run on the resources. In this
string the positions in the string represent the jobs
and the values at each position in the string represent
the sequence in which the jobs are submitted to the
resources. This string is termed a sequence string as
it gives the sequence of jobs submission on the
resources as given in Figure 4.
In this example, if we consider the allocations to
the resource 4 we find that jobs 4, 5 and 9 are
allocated to this resource. If we do not consider the
sequence string, then the jobs 4, 5 and 9 will be
executed on resource 4 in the order {4, 5, 9}. On the
other hand, the sequence string enforces the order
{9, 4, 5}.
4.2 Initial Population Generation
In the initial population step, a fixed number of
chromosomes are generated. In GA used here,
random methods are used to generate mapping
strings and sequence strings. While creating the
initial population of sequence strings, the values in
the genes are kept unique at the chromosome level.
To create the initial population of mapping strings of
the chromosomes, the list of feasible resources is
used, which every job-information unit contains.
The information keeper generates this list for every
job in the job information pool. In this step the
values are assigned in the mapping strings randomly,
from the list of feasible resources for each job. For
example, if job 2 has resources 1, 2 and 4 in the list
of feasible resources then while creating an initial
population of mapping strings, any value can be
assigned at position 2 out of 1, 2 and 4.
To create the initial population of sequence
strings, for each string the values are assigned based
on the following two constraints: first, the values
should be unique and second, the values should be
less than the total number of jobs. A simple method
is used to create these strings. For each string a list L
is created containing number ranging from 1 to j,
where j is the total number of jobs to be scheduled.
A value k is picked up from L and put into the
sequence string at its starting index. The value k is
then removed from L. After that, each time k is
picked randomly from L, put in the first available
index in the sequence string and then removed from
L. This process is repeated to generate every
sequence string in the initial population. The reason
for using random methods to generate an initial
population is to introduce diversity into the
population - the more diverse the initial population,
the more chances there are to reach an optimal
solution
.
4.3 Evaluation
In the evaluation step the population under
evaluation is checked for fitness. The smaller the
makespan, more fit the chromosome is. To
determine the fitness the GA makes use of the
makespan calculator. In case the order is not
Figure 3: Chromosome with mapping string.
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
166
important, the makespan calculator calculates
makespan in a First-Come-First-Served (FCFS) way
on the resources given by the mapping string. In the
other case, the order of execution of jobs is given by
a sequence string and the makespan calculator
calculates makespan based on order given by the
sequence string. The GA used here also determines
the best chromosome and the average fitness of the
generation under evaluation.
4.4 Selection and Crossover
In this step, the parents’ chromosomes are selected
to take part in reproduction to produce offsprings.
One option is to use the top half chromosomes
sorted in the order of fitness, however this may lead
to a local optimum and ignore the global optimum
(Wilkinson, 1999). To avoid this situation,
tournament selection (Wilkinson, 1999) is used. The
GA, in this step, chooses pairs of chromosomes
randomly from the population and selects the
chromosome with better fitness as a parent of the
next generation. Tournament selection provides a
fairly good chance for individuals to take part in
reproduction. The problem with this selection
method is that it produces parents half in number
than the number of individuals in the population.
This problem is addressed later in the crossover step.
Uniform Crossover is used for crossover for both
mapping and sequence strings.
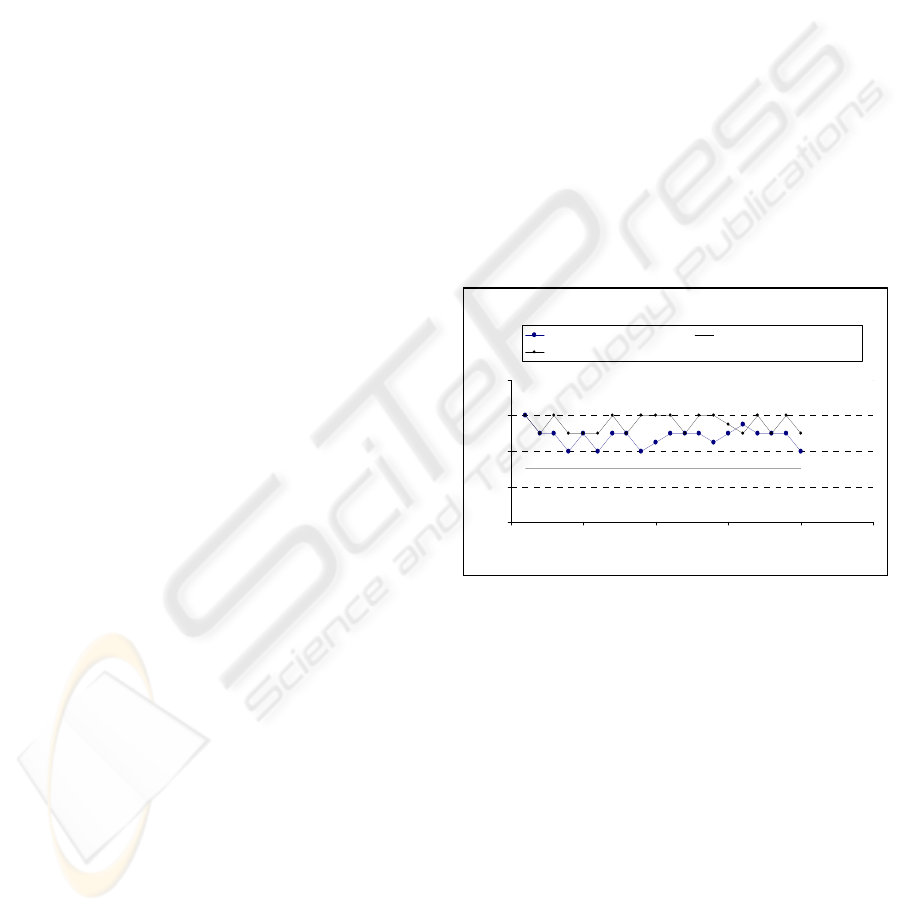
Comparison of the results obtained with the optimal value of makespan
140
160
180
200
220
0 5 10 15 20 25
Attempts
Makespan
Makespan obtained with ordering Optimal Makespan
Makespan obtained without ordering
5 EXPERIMENTS AND ANALYSIS
OF RESULTS
In the following sub-sections, the results obtained
from all the test cases used are given. These results
are obtained using following parameters:
Number of individual in a population = 1000
Total number of generations = 500
Uniform Crossover for mapping strings
Cycle Crossover for sequence strings.
Mutation operators
Crossover Probability = 0.95
Mutation Probability = 0.5
Tournament Selection with Elitism
Both representations of chromosomes
The termination condition is the completion of 500
iterations
These parameters were chosen after running a series
of experiments using the test cases given below and
found out to be best for this solution of the
scheduling problem. In the case of crossover for
mapping strings, the single-point and the two-point
crossovers produced almost similar results. In the
following sections the test cases and the analysis of
the results are given.
5.1 Test 32-4
This experiment had 32 jobs with different
computational requirements to be scheduled on 4
resources. In this experiment, the first 24 jobs can
run on all the 4 resources, but the other 8 jobs can
run only on resource 3 and 4.
Figure 5 shows the makespans achieved by the
scheduler when it is run 20 times. The scheduler was
able to get the makespan of 180 on 4 occasions
when the ordering of jobs was specified. It can be
inferred that scheduler resulted in a degradation of
6% from the optimal solution on 20% of occasions
when ordering is used. The most frequently
occurring makepsan in this case was 190 - occurring
12 times in 20 attempts of the scheduler. It can be
concluded that the scheduler was able to find a
solution which has a degradation of 12% from the
optimal solution on 60% of occasions. In short, in
90% of attempts, the makespan degradation was in
the range of approximately 6% to 12% when
ordering is specified. In the case of ordering, not
being specified, the makespan degradation was in
the range of 12% to 18% in all attempts.
Figure 5: Comparison of results obtained with the
optimal makespan
In the case of random scheduling the jobs are
assigned randomly on the feasible resources. The
makespan given in the graph is obtained by running
the random scheduling 20 times and considering the
most frequently recurring makespan. In the case of
best node first, the makespan is obtained by
allocating a job on a resource which can guarantee
the minimum completion time for that job. This
greedy approach for scheduling is also described in
(Kwok et al, 1999) as Minimum Completion Time
(MCT) heuristic. The makespans achieved by the
Job Scheduling in Computational Grid using Genetic Algorithm
167
scheduler using GA based approach with and
without ordering information, are compared with the
heuristics defined above.
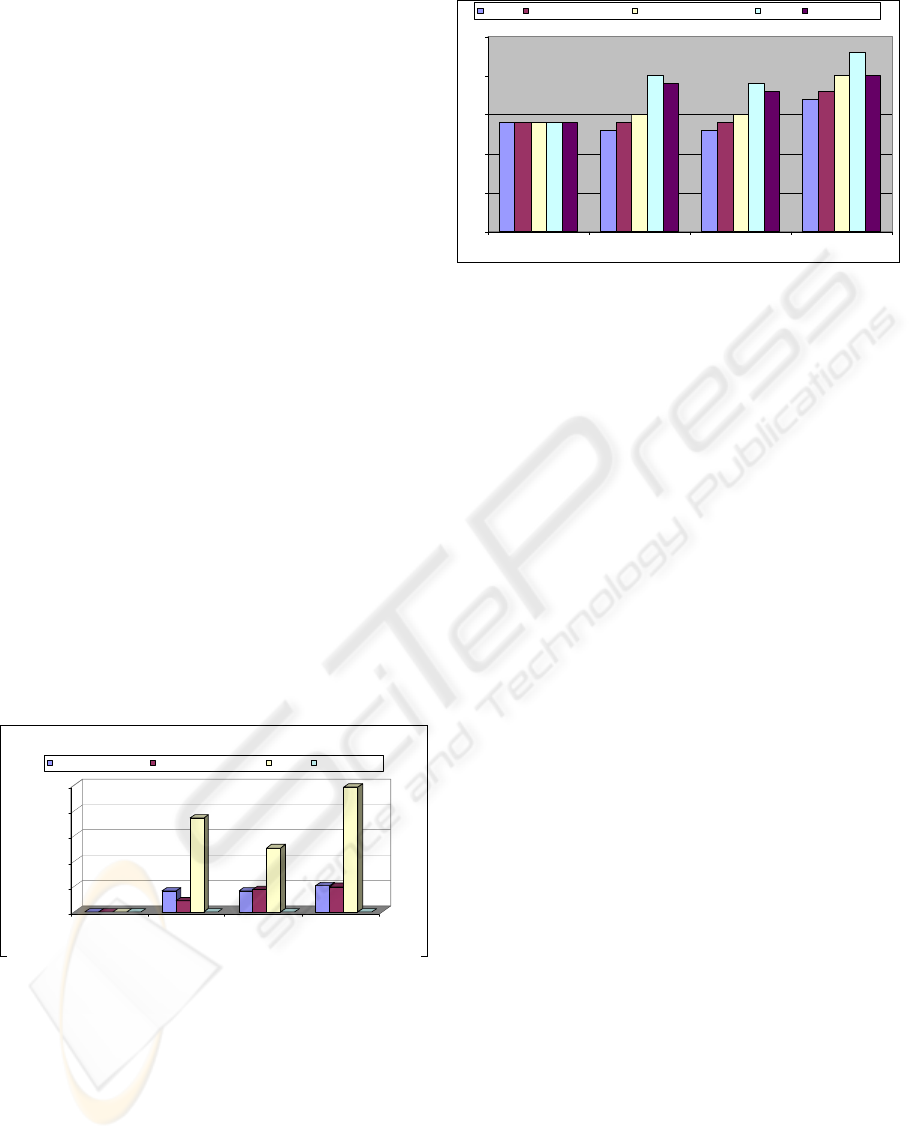
0
50
100
150
200
250
Test 9-1 Test 12-2 Test 24-4 Test 32-4
Optimal
GA with order specified
GA without order specified
Random
Best Node First
Figure 6 shows that the approach used in this
paper outperformed other heuristics stated earlier in
the performance. Random scheduling performed the
worst in all the test cases. The best node first
heuristic performed better than random scheduling
in all experiments. In the case of Test 9-1, best node
first had the same performance as the GA and was
able to achieve the optimal makespan. In all other
test cases, this heuristic was not able to compete
with GAs and was far removed from the optimal
makespan. The GA with ordering information
achieved better performance than the GA with no
ordering information. The GA with ordering
information was able to produce a schedule with a
makespan closer to the optimal makespan.
Figure 7: Standard Deviation of the different algorithms.
Figure 7 shows the comparison of standard
deviations observed with different algorithms. It was
observed that in Test 9-1 all the algorithms
performed the same as far as the stability of
algorithm was concerned. In all other cases the
random heuristic was found to be the most
inconsistent. The Best Node First heuristic was the
most consistent as it always came up with the same
solution. Both the GA approaches were almost
identical in consistency, but the approach with no
ordering information performed slightly better i.e.,
less standard deviation. But this fact does not make
this approach better than that with ordering
information. To elaborate more on the performance
of the algorithms, another comparison is made.
It is evident from the graph that the GA with
ordering information has the best performance as
compared to the other heuristics. In all the test cases
this approach was observed to come up with a
schedule having a makespan which had an average
deviation of 12% to 16% from the optimal. In the
case of the GA with no ordering information, the
average deviation range was observed to be 16% to
24%. In the case of random scheduling the average
deviation range was found to be 40% to 50%. The
average deviation range of the best node first
scheduling heuristic was observed approximately
18% to 46%. In short, the GA based scheduling
using ordering information had the best average
performance.
6 CONCLUSION
In this paper, the application model used had
independent jobs with no inter-communication. The
performance criterion chosen was to reduce the
makespan. In the experiments, the GA was run with
and without the sequence strings in the
chromosomes. It was found that if the GA is used,
not only to determine the job allocations on the
resources but also for the order in which jobs will
run, the performance of the schedule becomes better.
The approach used in this paper was also compared
with the one used in (Martino et al, 2002) and
(Martino, 2003). It was observed that the approach
used in this paper performs better that of Martino et
al in terms of performance and execution time of the
GA. The results of experiments wer also compared
with the other heuristics such as random allocation
and best node first. The GA based approach had
significantly more execution time but it
outperformed these heuristics in achieving sub
optimal makespans.
0
5
10
15
20
25
Standard Deviation
Test 9-1 Test 12-2 Test 24-4 Test 32-4
Test Cases
Comparison of Standard Deviations of heuristics
GA with order specified
GA without order specified
Random
Best Node First
Figure 6: Comparison of performance of GA
scheduling with other scheduling heuristics
REFERENCES
Hachbaum D. S., 1997. Approximation Algorithms for
NP-Hard Problems, PWS Publishing Company,
ISBN 0-534-94968-1.
Casanova H., Legrand A., Zagorodnov D. and Berman F.,
Heuristic for Scheduling Parameter Sweep
Applications in Grid Environments, In Proceedings of
Heterogeneous Computing Workshop 2000, page(s)
349-363.
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
168

Holland J.H., 1975. Adaptation in Natural and Artificial
Systems, University of Michigan Press, Ann Arbor,
Mich.
Srinivas M., Patnaik L. M., Genetic Algorithms: A
Survey, In IEEE Computer, Jun. 1994, page(s) 17-26.
Mitchell M., 1996. An Introduction to Genetic Algorithms,
MIT Press. ISBN 0-262-13316-4.
Zhang X. and Schopf J., Performance Analysis of the
Globus Toolkit Monitoring and Discovery Service,
MDS2. In Proceedings of the International Workshop
on Middleware Performance (MP 2004), part of the
23rd International Performance Computing and
Communications Workshop (IPCCC), April 2004.
Foster I., Kesselman C., The Globus Project: A Status
Report. In Proc. IPPS/SPDP '98 Heterogeneous
Computing Workshop, page(s) 4-18
Lowekamp B., Miller N., Sutherland D., Gross T.,
Steenkiste P., and Subhlok J. A Resource Query
Interface for Network aware applications, In Cluster
Computing, no. 2, 1999, page(s) 139-151.
Wilkinson B. and Allen M., 1999, Parrallel Programming
Techiniques and Applications Using Netwroked
Workstations and Parallel Computers, Prentice Hall,
ISBN 0-13-671710-1.
Kwok Y. K. and Ahmad I., Static Scheduling Algorithms
for Allocating Directed Task Graphs to
Multiprocessors, ACM Computing Surveys (CSUR),
Volume 31, Issue 4, December 1999, page(s) 406-471.
Martino V. D., Mililotti M., Scheduling in a Grid
Computing Environment Using Genetic Algorithms,
In IPDPS 2002 Workshops, International Parallel
and Distributed Processing Symposium, April 15 - 19,
2002,
Martino V. D., Sub Optimal Scheduling in a Grid using
Genetic Algorithms, In IPDPS'03 International
Parallel and Distributed Processing Symposium April
22 - 26, 2003
Job Scheduling in Computational Grid using Genetic Algorithm
169
