
PERFORMING REAL-TIME SCHEDULING IN AN
INTERACTIVE AUDIO-STREAMING APPLICATION
Julien Cordry, Nicolas Bouillot, Samia Bouzefrane
Laboratoire CEDRIC, Conservatoire National des Arts et Métiers, 292, rue Saint Martin, 75141 , Paris, France
Keywords: multimedia application, real-time scheduling, real-time system, distributed system.
Abstract: The CEDRIC and the IRCAM conduct since 2002 a project entitled "distributed orchestra" which proposes to
coordinate on a network the actors of a musical orchestra (musicians, sound engineer, listeners) in order to
produce a live concert. At each site (musician), mainly two components are active: the sound engine (FTS)
and an auto-synchronisation module (nJam), two modules which must treat audio streams in real time and
exchange them via the network. These components were first made to run under the Linux environment,
where the available schedulers are imposed. For this purpose, we choose to use Bossa, a platform grafted on
the Linux kernel in order to integrate new real-time schedulers.
1 INTRODUCTION
The distributed virtual orchestra is the result of a co-
operation between the research laboratories of the
IRCAM and the CEDRIC-CNAM
(Bouillot N., 2003)
(Locher H.-N. et al., 2003). The aim of this project is to
provide means to connect musicians that would play
in real time via Internet. The current version runs
over a multicast network. The musicians
communicate via PCM audio streams, a constraint
allowing a high quality hearing of the different audio
streams. Each musician broadcasts towards the other
musicians the music which he/she plays and hears the
music that he/she has just played after a constant
latency. Our purpose is to schedule the different
processes of each site, particularly those generated by
the sound device and the self-synchronization by
using a suitable real-time scheduling technique in
order to improve the global performances of the
application. We have chosen to use Bossa, an event-
based framework for process-scheduler development.
This choice is motivated by the following points:
- to use a "Bossa" scheduling for “Linux native”
appl
ications, both Linux and application must be
modified. However, a minimum of insertion of code
(three lines of code by process to attach it to a
specific scheduler) are required in an application
code to benefit from BOSSA schedulers. Linux is
automatically modified by Bossa: a set of rewriting
rules are applied to the sources of the Linux core.
This way allows us to test and configure easily new
schedulers in an environment (Linux) where many
applications are available. One could have used real-
time Linux such as RTAI
1
but this requires the
complete rewriting of the application considering the
particular structure of the real-time tasks and the
particular libraries to include.
- We will be able to use a real-time scheduler for
th
e management of the processes of our multi-media
application, rather than those of Linux
(SCHED_FIFO or SCHED_RR).
The paper is organised as follows. In section 2,
we describe the characteristics of our multi-media
application, the distributed virtual orchestra. In
section 3, we present the Bossa platform and we
show how it can integrate new scheduling policies. In
section 4, we determine the application processes
which need to be scheduled in real time, by defining
a scheduler hierarchy. Before concluding in section
6, section 5 presents our experiments, where we
show that BOSSA helps our application to meet the
timing constraints.
2 THE DISTRIBUTED VIRTUAL
ORCHESTRA
The free-software team of IRCAM and the
multimedia research team from CNAM-CEDRIC
conduct a project since 2002 named the "distributed
1
Real-Time Application Interfaces, developed in
Dipartimento di Ingeniera Aerospaziale, Politecnico
di Milano of Prof Paola Mantegazza
(http://www.aero.polimi.it/~rtai/applications /)
140
Cordry J., Bouillot N. and Bouzefrane S. (2005).
PERFORMING REAL-TIME SCHEDULING IN AN INTERACTIVE AUDIO-STREAMING APPLICATION.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 140-147
DOI: 10.5220/0002535501400147
Copyright
c
SciTePress

virtual orchestra". The aim of this project is to
provide means for musicians to play across the
Internet in real time (see Figure 1)
(Bouillot N., 2003)
(Locher H.-N. et al., 2003).
The application constraints are as follows:
- the musicians are physically separated but must
play virtually "together" in real time.
- the sound engineer must be able to adjust in real
time the audio parameters of the various sound
sources (e.g., to add reverberation effects, etc).
- the public must be able to virtually attend the
concert, either at home by a standard mechanism of
audio/video streaming, or in a room with a dedicated
installation.
In this paper, we are interested in the part
concerning the musicians only, since it is a critical
part in term of interactivity. Our application uses
jMax, a visual programming environment dedicated
to interactive real-time music and multimedia
applications
(Déchelle F., 2000). jMax has been
developed by the IRCAM. It is composed of two
parts: FTS for "faster than sound", a real-time sound
processing engine and a graphical user interface
which allows to add, remove or connect components
that exchange audio samples or discrete values. Some
examples of components available in jMax are the
inputs/outputs of the sound device, the arithmetic
operations and the digital audio filters. Since jMax is
often used to make audio synthesis, it has an
interface with the operating system, ALSA (for
Advanced Linux Sound Architecture) for Linux.
As we are close to virtual-reality conditions, the
sound quality, the feeling of presence, as well as
synchronism among musicians are crucial conditions.
For this reason, the technology developed for the
distributed concert uses a non compressed sound
(PCM samples at 44100Hz 16 bit, corresponding to
the quality of an audio CD). Additionally we use the
multicast with the RTP protocol
(Schulzrinne et al.,
1998)
for the communication among musicians. For
the feeling of presence, during our experiments, a
videoconference software allowed remote
visualisation among the musicians.
Usually, the musical interaction (all musicians in
the same room) is enabled thanks to a common
perception among musicians: the sound and the
visual events are perceived instantaneously,
simultaneously and with a sound quality limited by
the capacities of the human ears and eyes.
During networked performances, we can provide
the better quality for the sound, but we cannot
provide instantaneity. In fact, we estimate that 20ms
is the threshold above which the human ear perceives
the shifts. For this reason, we ensure a global
simultaneity among musicians thanks to a
synchronization mechanism described in
(Bouillot N.,
2003)
(Nicolas Bouillot N. et Gressier-Soudan E., 2004)
and implemented inside nJam (for network Jam), a
pluggin of jMax. This synchronization ensures that
the return of the overall mix of the music is identical
for all the musicians. nJam computes the diffusion of
the sound through multicast with RTP, the
synchronization of the audio streams, and the shift
between the musicians. Thus, the musicians specify a
tempo, as well as the shift in musical units (a beat, an
eighth note, a sixteenth note, etc). This parameter
enables them to have a shifted feedback, which is
synchronized and matches the beats of the music they
are playing on their instrument.
We can extract some constraints for the operating
system and the network: each instance of nJam will
send on the network only one audio stream and will
receive N from them (if N sites are involved). Then,
FTS manages at least one component corresponding
to an input (microphone or instrument) and one
component for each output of the sound device.
Within the RTP protocol, the isochronism of the
audio data is ensured by a time-stamping that
corresponds to the number of audio samples.
Additionally, each site is controlled by its own clock,
that came from the local sound device. At each site-
clock tick, a sample of 16 bits is produced and a
sample coming from each source is consumed. Thus,
the constraints of end-to-end temporal delivery are
crucial, either for the network part or for the system
part FTS/ALSA.
In this paper, we focus on the schedule of various
application components by using a real-time
scheduling technique.
3 BOSSA
The distributed virtual orchestra is an application
written in C whose execution environment is the
Linux system. From a system point of view, this
application is confronted with the resource sharing,
in particular in terms of access to the processor and
to the peripherals (network device and sound
device). However, a guaranteed periodic access to
these resources is necessary. In this context, the use
of a real-time Linux system (such as RT-Linux
2
or
RTAI) would enable us to try out scheduling policies
not available on the traditional Linux system.
Nevertheless, to profit from these policies, the target
application must respect the structure of the real-
time tasks and include the particular function calls of
the library of real-time Linux. To avoid modifying
the source code that deals with the logic of the
application, we choose to use rather Bossa. Indeed,
to our knowledge, it is the only platform which can
2
http://www.fsmlabs.com
PERFORMING REAL-TIME SCHEDULING IN AN INTERACTIVE AUDIO-STREAMING APPLICATION
141
integrate real-time schedulers into the Linux core,
thus allowing Linux processes to be scheduled
according to a scheduling policy integrated in Bossa.
The only modification to perform on the source code
of the process is the insertion of a function call used
to attach the process to the selected scheduler.
Before presenting the Bossa
3
platform, we
describe the Bossa DSL (domain-specific language)
used to implement new scheduling policies.
3.1 The Bossa DSL
The technique used by Bossa to integrate new
scheduling policies in an existing operating system is
the use of a dedicated language (DSL: Domain
Specific Language). A DSL is a programming
language providing high-level abstractions
appropriate to a given domain and permitting
scheduling-specific verifications and optimizations.
Each scheduling policy in Bossa is implemented
as a collection of event handlers that are written in
Bossa DSL and translated into a C file by a dedicated
compiler. A Bossa scheduling policy declares: (i) a
collection of scheduling-related structures to be used
by the policy, (ii) a set of event handlers, and (iii) a
set of interface functions, allowing users to interact
with the scheduler.
Table 1 shows some of the declarations made by the
Bossa implementation of the Linux 2.2 policy. The
process declaration lists the policy-specific
attributes associated with each process. As reflected
by the policy field, the Linux 2.2 scheduling
policy manages FIFO and round-robin real-time
processes, as well as non real-time processes. The
other fields of the process structure are used to
determine the current priority of the associated
process. Finally, the ordering_criteria
declaration specifies how the relative priority of
processes is computed. Table 1 shows also examples
of event handlers of the Linux2.2 policy. For
example, the event handler block. * moves the
target process to the blocked process whereas the
event handler unblock. * moves the target
process from the blocked queue to the ready queue.
3.2 From the Linux kernel to Bossa
The developers of Bossa examined the problem of
operating system (OS) evolution in the context of
adding support for scheduler development into the
Linux OS kernel. The goal of Bossa is to simplify
the design of a kernel-level process scheduler so that
an application programmer can develop specific
policies without expert-level OS knowledge
(Julia L.
3
http://www.emn.fr/x-info/bossa
Lawall et al., 2004) (Barretto L. P. et al. 2002). A Bossa
scheduling policy is implemented as a module that
receives information about process state changes
from the kernel via event notifications and uses this
information to make scheduling decisions.
Table 1: Declarations of the Linux 2.2 policy
Declarations Event Handlers
type policy_t =
enum {SCHED
_
FIFO,
SCHED_RR, SCHED_OTHER}
process = {
policy_t policy;
int rt_priority;
time priority;
time ticks;
system struct ctx mm;
}
On block.* {
e.target =>
bocked;
}
On unblock.*
{
if (e.target
in blocked) {
e.target =>
ready;
}
}
ordering_criteria = {
highest rt_priority,
highest ticks,
highest
((mm==old_running.mm)?
1:0)}
Preparing a kernel for use with Bossa requires
inserting these event notifications at scheduling
points throughout the kernel. The evolution of the
Linux kernel to support Bossa is rather complex, for
various reasons. First, Bossa would like to be used
across the many sub-series of Linux releases, which
do not contain new algorithms. A solution based on
patches is not sufficient because the line numbers of
the scheduling points as well as the code surrounding
these points can differ across releases. Second, some
of the changes required to support Bossa depend on
control-flow properties. Detecting such properties by
hand is error-prone even when considering a single
version of Linux. Finally, making any changes by
hand across multiple files of a large piece of software
(Linux currently amounts to over 100MB of source
code), is tedious and error-prone. Hence, the
rewriting principle has been used to implement a
crosscutting functionality that contains a collection of
code fragments and a formal description of the points
at which these fragments should be inserted into the
target application. This functionality uses temporal
logic to precisely describe code insertion points and
thus resolve the context-sensitivity issue.
An example of a rewrite rule is the following as it
is described in
(Aberg R. A. et al., 2003):
n:(call try_to_wake_up))
=>Rewrite(n,
bossa_unblock_process(args))
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
142

This rule matches any call to the function
try_to_wake_up. A node matching this pattern is
given the name n. The use of Rewrite indicates
that the call to try_to_wake_up is replaced by a
call to bossa_unblock_process. The function
wake_up_process shown below illustrates the
effect of applying this rule.
wake_up_process(struct task_struct * p)
{
#ifdef CONFIG_BOSSA
return bossa_unblock_process
(WAKE_UP_PROCESS, p, 0);
#else
return try_to_wake_up(p, 0);
#endif
}
The Linux kernel is rewritten using over forty
logical rules of a rather great complexity
implemented in Ocaml and Perl via CIL (C
Intermediate Language). Even with these methods
which are supposed to guarantee a minimum of
reliability, the error is always possible. Thus, when
using Bossa with the distributed virtual orchestra, we
could note the failure of a rewriting rule.
3.3 Bossa: a hierarchy of schedulers
A scheduler is a complex application since that it
requires understanding the operation of multiple low-
level kernel mechanisms. Ideally, to be able to
implement new scheduling policies, the scheduler
and the rest of the kernel must be completely distinct
but perfectly interfaced.
Bossa proposes a specific abstraction level to
scheduling domain. Instead of calling directly the
functions of the scheduler (typically schedule ()),
the drivers call a system of events. Indeed, the Bossa
framework replaces scheduling actions in the kernel,
such as the modifying of a process state or the
electing of a new process, by Bossa event
notifications. Event notifications are processed by
Bossa run-time system (RTS) (see Figure 2) which
invokes the appropriate handler defined by the
scheduling policy.
To resolve the problem of coexistence of real-
time and non real-time programs, Bossa introduced
the concept of hierarchy of schedulers. A process
scheduler is a traditional scheduler that manages the
processes in order to allocate to them a processor
time. A virtual scheduler is a scheduler that controls
other schedulers. Thus, one can create a virtual
scheduler with child schedulers to which it can give
control according to well defined criteria (for
example, priority) or according to a proportion (for
example the virtual scheduler will give control once
on three to the child scheduler number 1 and twice
out of three to the child scheduler number 2). The
system scheduler will thus have a tree form where
nodes are virtual schedulers and leaves are process
schedulers. The main difference between a process
scheduler and a virtual scheduler is the handling of
events. The Bossa run-time system sends the event to
the first scheduler in the hierarchy. After receiving
the event, a virtual scheduler forwards the event to
the appropriate child scheduler and then updates the
child scheduler state according to the result of the
event treatment.
4 REAL-TIME SCHEDULING OF
THE DISTRIBUTED
ORCHESTRA
Many real-time scheduling algorithms are described
in the literature
(Cottet F et al., 2002) nevertheless they
are not implemented on usual (non real-time)
operating systems. We have chosen Bossa because
our multimedia application will continue running
under Linux while using a real-time scheduling
strategy for the processes.
In the remainder of this section, we will
investigate the real-time processes of the distributed
orchestra that must be scheduled by using a real-time
scheduling policy. For this purpose, we will be
interested in the FTS/jMax and nJam modules that
constitute the heart of our application.
4.1 Analyzing FTS and nJam
processes
As explained in section 2, at each site FTS, the audio
engine, manages the jMax components like the audio
inputs/outputs or nJam (the pluggin of jMax). During
the initialization of FTS (when starting jMax),
modules (like ALSA under Linux ) will be loaded.
Then, the user can define, connect and set parameters
of the components via a graphical interface. The FTS
engine has a loop structure(see the following code):
the functions associated to the components are
executed one by one (with a beat driven by the sound
card). Indeed, the function
fts_sched_do_select returns in
main_sched the list of the functions to be
executed.
void fts_sched_run(void)
{
while(main_sched.status! =
sched_halted)
PERFORMING REAL-TIME SCHEDULING IN AN INTERACTIVE AUDIO-STREAMING APPLICATION
143

fts_sched_do_select(&main_sched);
}
FTS starts by analyzing the output of the
graphical interface to deduce a set of dependences
between FTS components. The execution of the
functions associated to the components will allow
audio-data exchange between components and a
possible output over the sound device. This loop is
critical since each function registered in FTS engine
corresponds to a set of samples which must be
available to the next cycle. During our experiments,
the cycles were equivalent to 64 samples each,
corresponding to a duration of 64/44100 seconds, i.e.,
1.45 ms.
In addition to FTS, the nJam patch synchronize
musicians to provide the perceptive consistency
(Nicolas Bouillot N. et Gressier-Soudan E., 2004).
Additionally, it keeps the isochronism from end to
end by playing null sample when data come late
(RTP is build on top of UDP). In this way, nJam
needs periodical accesses to the sound card and the
network interface nJam starts mainly a thread which
loops on the reception and the sending of RTP
packets until the end of connections. It is the
greediest operation from the resources point of view.
4.2 The distributed orchestra under
Bossa
To run the distributed orchestra under Bossa, we
define a scheduler hierarchy. The development team
of Bossa has already worked on multi-media
applications
(Consel C. et Marlet R., 1998). Indeed, they
developed a version of mplayer that uses the EDF
technique. This version requires to define the
attachment of the application to the scheduler with a
period and an execution time expressed in jiffies
(CPU clock ticks). We define a tree structure with
one level so that the root which corresponds to a
virtual scheduler is composed of two child process
schedulers: one process scheduler corresponds to the
EDF version of mplayer and the other one is a
traditional Linux process scheduler. The virtual
scheduler is a fixed-priority based scheduler, in other
words it handles two child schedulers having static
priorities. In our case, the priorities are associated to
the process schedulers so as to favour systematically
EDF over a Linux scheduler. The following
commands allow the creation of the schedulers
hierarchy of Figure 3.
panoramix:/home/cordry # modprobe EDFu
panoramix:/home/cordry # modprobe
Fixed_priority
panoramix:/home/cordry # /bin/manager
Available schedulers:
0. Linux (PS, root, default)
1. EDFu (PS, not loaded, not default)
2. Fixed_priority (VS, not loaded,
default)
Default path:
Linux
Command: (the scheduler number uses)
C <P> <C> connect relative scheduler P
to child scheduler C
D <S> disconnect scheduler S
L list available schedulers
H print this help finely
Q quit
> C 2 0
int importance_10: 5
> C 2 1
int importance_10: 7
> L
Available schedulers:
0. Linux (PS, loaded, default)
1. EDFu (PS, loaded, not default)
2. Fixed_priority (VS, root, default)
Default path:
Fixed_priority - > Linux
> Q
All the processes will be executed by default
under Linux, except for the principal loop of FTS
(which makes audio computation) and the nJam
thread (in charge of the emissions and receptions of
RTP packets) which will be scheduled in real time.
Any process which must be scheduled under
Bossa, must be attached to a scheduling policy. In the
context of our application, FTS loop will be attached
to EDF scheduler while specifying the worst case
execution time of the loop and its deadline that is
equal to its period.
To compute the execution time of FTS loop, it is
necessary to evaluate the execution time of the
various functions called. These functions associated
with the components prepare 64 samples at each
clock tick of the sound device, that is, a cycle which
takes 64/44100=1.45 ms. Greater is the number of
components, greater is the number of associated
functions, which increases the execution time of FTS
loop. In our experiments, according to the number of
components defined, we limited the execution time
of FTS loop to 4 jiffies (CPU clock ticks, on a
modern hardware a jiffie approximates 10ms) and
fixed its period to 5 jiffies.
The following code shows the modifications that
were have carried out on FTS loop in order to attach
it to EDF scheduler.
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
144

/* we include the definitions of EDFu
*/
# include " user_stub_EDFu.h "
void FTS_sched_run(void)
{
int period = 5;
int wcet = 4;
/* we attach the current process to the
EDFu scheduler * /
if (EDFu_attach(0,period,wcet) < 0)
FTS_post("Cannot attach (%s)\n",
strerror( errno));
while(main_sched.status! =
sched_halted)
FTS_sched_do_select(&main_sched);
/* we loop on the list of functions
called by FTS until the end */
}
Similarly, we attached the nJam thread to the
EDF scheduler by assigning to the thread a period
equal to 10 jiffies and a worst case execution time of
1 jiffie. The following code shows this attachment.
void start_routine(nJam_t * this)
{
struct timeval timeout;
pid_t my_pid;
int wcet = 1;
int period = 10;
my_pid = getpid();
if (EDFu_attach(0, period, wcet) < 0)
fts_post("Cannot attach %u (%s)
\n",my_pid,strerror( errno));
pthread_exit(0);
}
5 PERFORMANCES EVALUATION
We have run the distributed orchestra application by
using sound automates that generate a 16 bit PCM
audio signal at a frequency of 44100 Hz (one
automate on each site). The machine called "breton"
has an Intel processor of 3 GHz with a memory of 1
GB and uses Linux as operating system (kernel
2.6.5). The machine "panoramix " has an Intel
processor of 350 MHz with a memory of 256 MB
and uses Linux with two kernels (Bossa and kernel
2.4.21). The curves we present correspond to the
quantity of data stored in the buffers of nJam, each
buffer corresponds to a musical source. These data
are regularly consumed by FTS in order to feed the
sound device. Since the production of audio samples
as their consumption take place at the same rate
theoretically (if we consider that the clocks of the
sound cards do not derive), the quantity of data
should be constant, modulo the jitter of the network.
The measurements are made from the first
communication between the machines, showing
abrupt increasing due to the adjustment of latencies
to synchronize audio streams.
Figure 4 shows the ideal situation for the machine
panoramix (which runs under Bossa), i.e. when the
system is not overloaded. In this case, the
producer/consumer relation of the audio streams
coming from panoramix and breton is correctly
preserved (the curves are constant starting from the
33th second).
Figure 5 shows the case where the machine
panoramix runs with a Linux system loaded thanks
to a script and started at the 29th second on
panoramix. From this moment, the audio samples are
not heard any more at the output of the sound device,
causing an imbalance in the producer/consumer
relation of nJam. The curve of figure 5 shows the
nJam buffer size of panoramix machine. We can see
that the data coming from breton are not consumed
since their quantity increases. However, the local
stream remains constant, letting us assume that the
data are not sent. This assumption is confirmed by
the curve of figure 6, because the machine breton
stops abruptly the reception of data from panoramix
at the 50th second. We thus see clearly thanks to
figure 5 that processor loads blocks completely the
access to the sound device (FTS process) as well as
the sending and the reception of the data on the
network (thread nJam) .
We made the same load test with panoramix
while running under Bossa. Process FTS as well as
the thread nJam being scheduled with an EDF policy.
In this case, in spite of the load, we can see on figure
7 that the machine panoramix is not disturbed by the
load script, neither in relation with the network, nor
regarding to the sound-device access. It shows that
nJam meet its timing constraint, instead of an heavily
loaded system.
6 CONCLUSION
The project on the distributed virtual orchestra aims
to provide means to allow to remote musicians to
play music via Internet. In this paper, we provide
some execution guaranties, which help the
application to satisfy the temporal requirement, both
for the local device and for the network access.
In addition to FTS/jMax module, N. Bouillot
proposed an audio-stream synchronization algorithm
PERFORMING REAL-TIME SCHEDULING IN AN INTERACTIVE AUDIO-STREAMING APPLICATION
145

to provide synchronism among the musicians. This
algorithm is implemented as a jMax pluggin. We
wanted to show here how we proceed to schedule the
various processes generated by these components by
using a real-time scheduling technique in order to
handle the temporal constraints of the application.
We chose to use Bossa, an event-based platform
which integrates easily new scheduling policies
without changing the operating system. We used the
concept of scheduler hierarchy defined in Bossa to
schedule the real-time processes of our application
according to an EDF-based technique more
appropriate to the multi-media domain. Non real-time
processes are handled by a traditional scheduler of
Linux.
Finally, the experiments carried out show that we
can test and configure specific schedulers in a widely
deployed desktop environment (Linux). Thus, we
argue that BOSSA allows us to test new schedulers
easily with multimedia applications and with a small
cost. However, the Linux kernel must be replaced by
the kernel modified by the BOSSA rewriting rules.
This modifications performed on Linux can be
performed only by specialists.
Several search directions can be explored as a
perspective to this work. Nevertheless the direction
which seems to be essential to pursue this work
concerns
o first, a precise study of the parameters relating to
the quality of service of the network which could
influence the temporal characteristics of the real-
time processes of the distributed orchestra and
o second, the configuration of the scheduler. We
have seen that the scheduler is configured with
Jiffies. However, our constraints are expressed in
time units which depend on the sound-device
clock. Thus, we plan to modify Bossa to use
system calls, as the access to the sound device,
inside the scheduler configuration
ACKNOWLEDGMENTS
We would thank Mr Gilles Muller, Professor at Ecole
des Mines de Nantes (France) and a Bossa-team
member, and Mr Jean-Ferdinand Susini, Associate-
Professor at CNAM (Paris), for their relevant
remarks that help us to improve the content of this
paper.
REFERENCES
Aberg R. A., Lawall J.L., Südholt M., Muller G. And Le
Meur A.-F., "On the automatic evolution of an OS
kernel using temporal logic and AOP", Automated
Software Engineering, 2003.
Baretto L. P. et Muller G., "Bossa: a language-based
approach to the design of real-time schedulers", In 10th
International Conference on Real-Time Systems
(RTS'2002), pages 19-31, Paris, France,march 2002.
Bouillot N., "Un algorithme d'auto synchronisation
distribuée de flux audio dans le concert virtuel réparti",
RenPar'15, CFSE'2003, SympAAA'2003, pp.441-452,
France, oct. 2003.
Nicolas Bouillot N. et Gressier-Soudan E.,"Consistency
models for Distributed Interactive Multimedia
Applications". A paraître dans Operating Systems
Review. Volume 38, issue 3. Octobre 2004.
Consel C. et Marlet R., "Architecturing software using a
methodology for language development", Proc. of the
10th Intern. Symp. On Programming Languages,
Implementations, Logics and Programs, Pise, Italy, pp.
170-194, 1998.
Cottet F., Delacroix J., Kaiser C. et Mammeri Z.,
"Scheduling in Real-Time Systems", Wiley Ed., 261
pages, 2002.
Déchelle F., "jmax: un environnement pour la réalisation
d'applications musicales temps réel sous Linux", Actes
des journées d'Informatique Musicale, 2000.
Julia L. Lawall, Gilles Muller, Hervé Duchesne, "language
design for implementing process scheduling
hierarchies", Invited application paper, in Proc. of the
ACM/SIGPLAN Workshop Partial Evaluation and
Semantics-Based Program Manipulation Proceedings
of the 2004 ACM SIGPLAN symposium on Partial
evaluation and semantics-based program manipulation,
pages 80-91, ISBN:1-58113-835-0, Italy, August 24-
25, 2004.
Julia Lawall, Gilles Muller, Anne-Francoise Le Meur, " On
the design of a domain-specific language for OS
process-scheduling extensions", in Proc. of the Third
International Conference on Generative Programming
and Component Engineering (GPCE'04), Vancouver,
October 24-28, 2004.
Locher H.-N., Bouillot N. Becquet E., Déchelle F. &
Gressier-Soudan E.,"Monitoring the Distributed Virtual
Orchestra with a CORBA based Object Oriented Real-
Time Data Distribution Service", International
Symposium on Distributed Object Application, nov.
2003. Catagne, Italy.
Schulzrinne, Casner, Frederick and Jacobson. RTP: A
Transport Protocol for Real-Time Applications. RFC
1889. 1998.
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
146
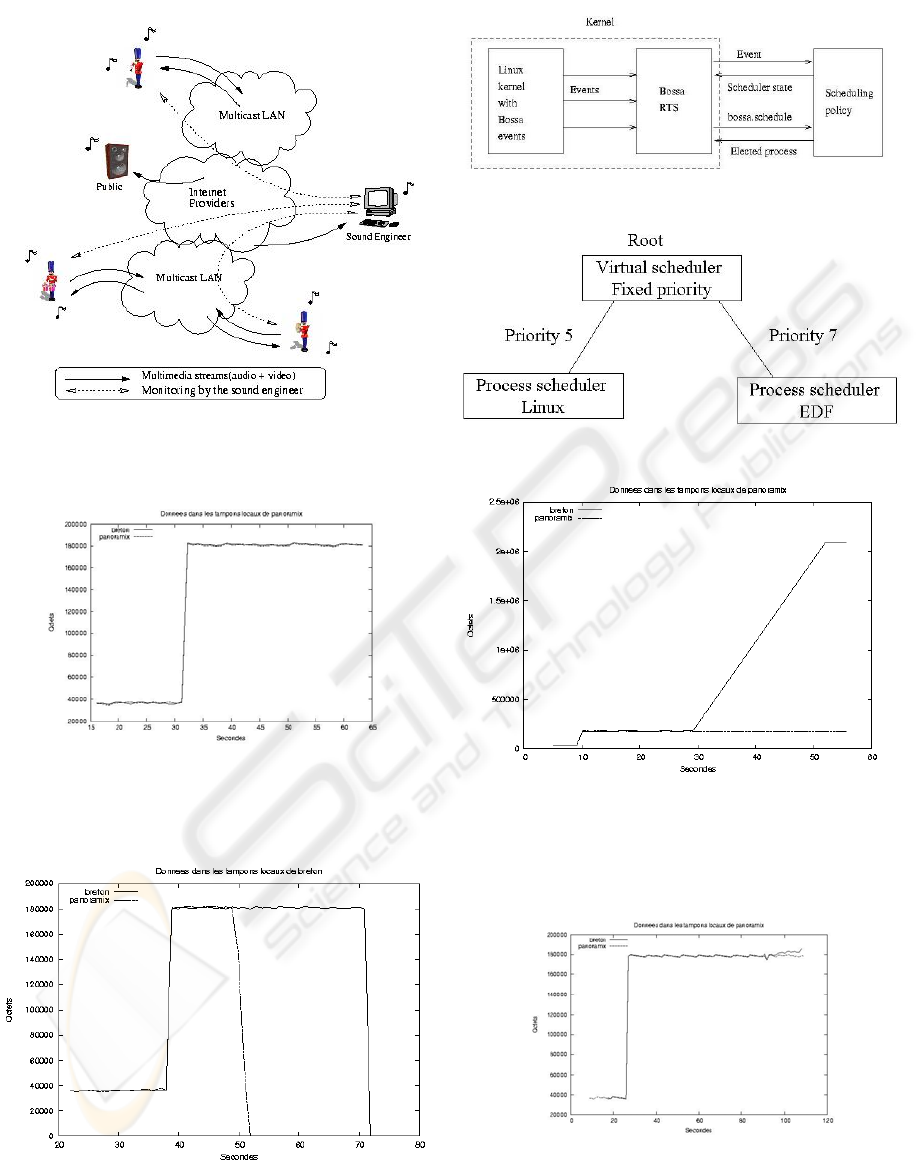
Figure 1: The distributed virtual orchestra
Figure 2: Bossa architecture
Figure 3: A scheduler hierarchy
Figure 4: The behaviour of panoramix using Bossa and
breton using Linux when the system is not loaded (from
panoramix point of view)
Figure 5: The buffers sizes of panoramix and breton when
they run under Linux with a loaded system(from panoramix
point of view)
Figure 6: Buffers size of panoramix and breton running
under Linux with a loaded system (from breton point of
view)
Figure 7 Buffers size of panoramix running under Bossa
with a loaded system
PERFORMING REAL-TIME SCHEDULING IN AN INTERACTIVE AUDIO-STREAMING APPLICATION
147
