
DYNAMIC COALITION IN AGENT AWARE ADHOC VIRTUAL
P2P INTERCONNECT GRID COMPUTING SYSTEM –
A
3P
VIGRID
Avinash Shankar, Chattrakul Sombattheera, Aneesh Krishna, Aditya Ghose, Philip Ogunbona
Decision Systems Lab [DSL]
School of IT and Computer Science,Univerity of Wollongong, NSW-2522, Australia
Keywords: Dynamic Coalition, Grid, P2P, Agents, A
3p
viGRID.
Abstract: Artificial Intelligence and High performance Grid computing s
ystems are two different fields of
technologies that have been much researched upon and are as old as the development of personal computers
and its related technologies. Technologies such as Agent based systems and the Semantic Grid have evolved
with the use of Artificially Intelligent techniques such as the Turing system of intelligence measurement.
Similarly Peer to Peer computing and Supercomputing Grids have evolved from distributed and middleware
clustering systems such as Condor. In this paper a new architectural schematic is proposed where
technologies such as Agents, P2P computing and Adhoc systems are incorporated in a Grid Computing
framework for the optimal Job processing and delivery to the end user transparently. Applying Dynamic
Coalition techniques in Agent based Grid computing systems has been a meagrely researched Area. The
proposed system A
3p
viGrid tends to deploy a service oriented schematic that enables users to search for,
negotiate using agents, do remote Job Processing and use resources without the need for a resource
discovery model in place that is commonly used in current day high performance Grid systems.
1 INTRODUCTION
Applying Agent based Concepts to Grid Computing
brings a new era of Computing systems that learn
and act according to the needs of the end user. Here
we give a brief introduction to the various
techniques and technologies that will be used in
designing the A
3p
viGRID System.
“Grid computing can be defined as a
decent
ralized, pervasive, transparent and simplistic
schematic which is governed by no central body that
uses different types of heterogeneous computing
platforms / technologies and their resources over a
decentralized interconnected network such as the
Internet.”(Source:http://www.huihoo.com/grid/grid_
computing_info_centre.htm, Last visited 5/01/2005)
The driving force behind Grid and High
perform
ance computing research seems to be a
desire to harness and share idle computing resources
across organizations world over. Grid technology
has gotten a lot of attention from both academic and
commercial environments. The academic
community is seeking better ways to tackle High
performance problems, and the commercial
industries interest’s lies in more e-client usage of
commodity hardware to reduce operational costs (or)
replace expensive specialized computers. Good
examples of High-performance Cluster or Grid
Computing systems would be the TeraGrid project
(Source: www.teragrid.org), UK E-Science project
(Source:www.escience-grid.org.uk), etc, that
performs in the measure of Teraflops in terms of
processing speeds and Terabytes of storage space.
Such vast resources should be made available and be
used to the fullest extent possible. The A
3p
viGrid
System tries to provide such a Framework for
effective utilization of such systems to bring service
oriented Grid computing to the desktop user
irrespective of the location and topology. Peer-to-
Peer computing is the concept of sharing resources
in ways of a give and take policy. P2P computing is
a subset of High performance Grids or Cluster
computing. The technology was an offspring of
many different technologies and has become famous
after the success of High performance computing. A
peer is a single entity (or) node that shares its
resources with other peers (or) nodes directly (or)
indirectly connected to it. Early peer-to-peer systems
were primarily made to enable users to share, often
illegal, files easily and in public. Early systems
either had scalability problems or were not pure
peer-to-peer systems. Now there are more serious
170
Shankar A., Sombattheera C., Krishna A., Ghose A. and Ogunbona P. (2005).
DYNAMIC COALITION IN AGENT AWARE ADHOC VIRTUAL P2P INTERCONNECT GRID COMPUTING SYSTEM – A3PVIGRID.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 170-175
DOI: 10.5220/0002530701700175
Copyright
c
SciTePress
research and product development efforts on peer-
to-peer technologies. Sun’s JXTA (Source:
www.jxta.org) effort is one important arena today.
In the open source community peer-to-peer systems
also seems to have matured and issues on scalability
have been addressed in some systems, e.g. (Condor /
Condor - G, www.cs.wisc.edu/condor/ and
Bearshare, Kazza, Gnutella, www.zeropaid.com).
Peer-to-peer systems also have a basic goal of
utilizing distributed resources and providing services
to the participating nodes. Today services have
primarily been file sharing systems, but Sun’s JXTA
framework shows peer-to-peer computing is not
limited to just that. Especially Sun Microsystems
JXTA and P2P-JXTA (Source: www.openp2p.com)
show that peer-to-peer computing actually has many
similarities with Grid and agent based systems.
2 COALITIONS IN AGENT-BASED
GRIDS
A coalition, in the context of agent-based systems, is
usually defined to be a group of agents that come
together to solve a common task or achieve a
common objective. Coalition has its roots from
Game theory where players {agents} form groups
and plot a strategy for winning a Game. In general
with respect to Agent based Systems and Game
Theory, coalition formation occurs on the fly where
agents tend to form groups to achieve a common
goal such as Job processing or maximizing their
utility value. Here with respect to Grid computing
we en-route and define two new concepts called
Static coalition and dynamic coalition in agents
based grid systems. Two categories of coalitions are
of interest here: static and dynamic.
Static coalitions are typically formed on the basis
of more persistent common goals and tasks, and are
less likely to change from problem to problem.
Dynamic coalitions, on the other hand, are
groupings that are formed to address the needs of
a specific task or common objective. Once these
tasks are completed, or the common objectives
met, dynamic coalitions tend to disband, and re-
form in different ways. Here in A
3p
viGRID we
use dynamic coalition formation techniques for
effective job processing and aggregation of
resources available. Our fundamental premise is
that coalition mechanisms add value in the
context of agent-based grids, for the following
reasons:
• Coalitions of peers can reduce the
communication overhead involved in executing
complex tasks and services which require the use
of multiple peers.
• Coalitions of peers can better enable better
matching between the requirements of tasks/services
and the infrastructure that is made available to
execute these. For instance, an appropriate coalition
formation mechanism can put together a collection
of peers with similar platforms and QoS
characteristics that are best suited for a given task.
• Coalition formation mechanisms can be used
to optimize complex trade-offs between the
objectives of maximizing the utility of the service
requester(s) and the service providers. For example a
service requestor could be maximizing its payoff for
the given task by being an intermediary service
provider that outsources its job to third party agents
thus maximizing his individual utility value.
• Coalition formation mechanisms can
economically increase system throughput as a
whole. After some negotiation among agents, tasks
will be allocated to appropriate coalitions who can
execute them with minimal costs and time. Thus
agents seem to be better off. A good example of this
would be the formation of coalition among agent in
a local Linux cluster where the maximum payoff is
achievable with minimal communication costs.
3 THE A
3p
viGRID
ARCHITECTURE
The A
3p
viGRID Architecture is primarily focused on
providing a Peer to Peer based Adhoc Multi Agent
Environment that enables users to remotely join the
A
3p
viGRID system to search for new serial/parallel
programs and submit jobs for job processing. A very
good example would be P2P file-sharing systems
such as Bear share, Kazza, Gnutella etc that use
directory services to register the location of peers
along with the information of the list of files used
for sharing.
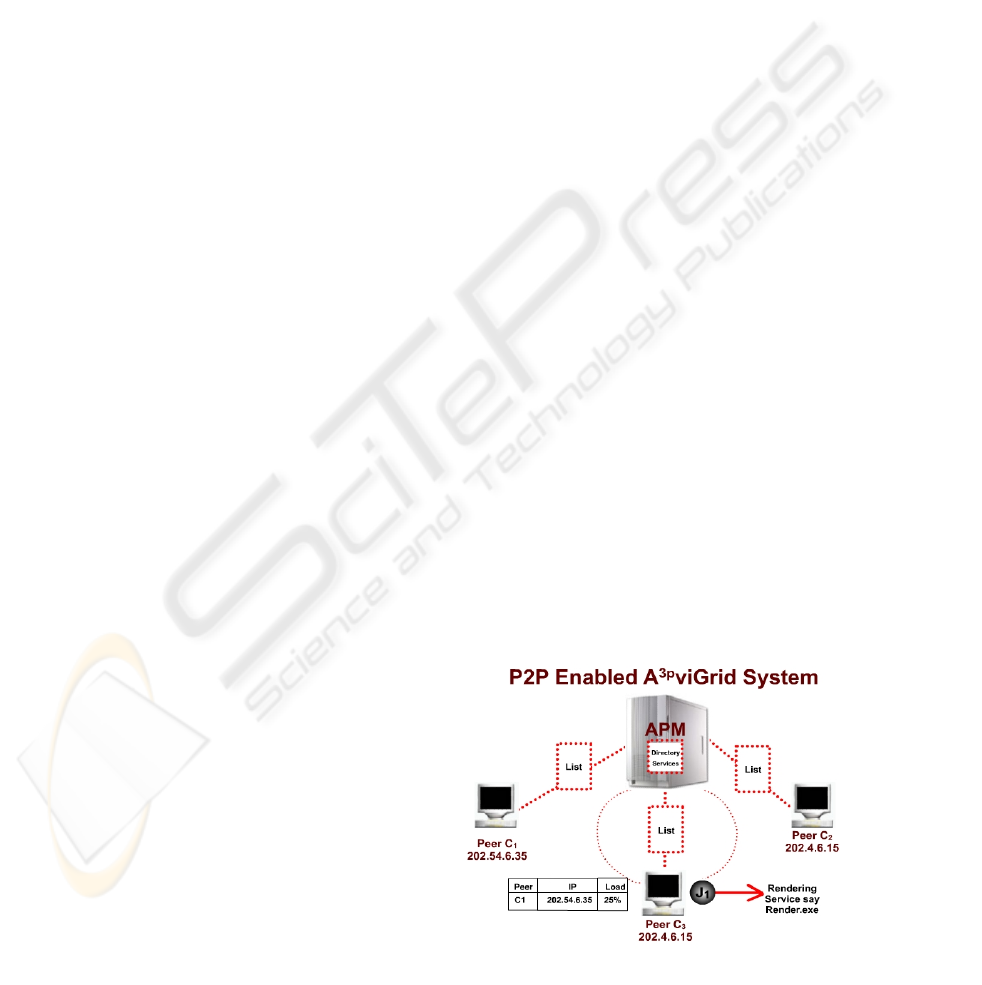
Figure 1: Peer to Peer A
3p
viGrid Syste
m
DYNAMIC COALITION IN AGENT AWARE ADHOC VIRTUAL P2P INTERCONNECT GRID COMPUTING
SYSTEM – A3PVIGRID
171

3.1 Agent Based Peer Manager
[APM]
The Agent based Peer manager is an intelligent
agent that handles negotiating and registering of
services based on directory services. Although it
poses a threat as a centralized scheme, it’s primarily
used for discovery and communications between
agents and their respective peers based on a light
weight directory services model such as LDAP
(Source: Open LDAP directory service protocol -
Source: www.openldap.org). The primary role of the
APM is to register services of agents based on
commonality and self-interests factors and also help
in discovery and formation of Coalitions in agents
based on the commonality of their services rendered.
The APM also tends to act as a broker or
middleware for all agents associated with it. An
economic brokering system could be incorporated
based on the usage of the APM which renders as a
service to self-interested agents and agent based
systems in its locality.
3.2 Electing a RSD Leader
Let there be a set of agents {A, B...E} located in
nearby locations. We assume that these agents form
a Regional service domain [RSD] based on a set of
attributes that are adhered to by the agents and the
service requestor. That is all the agents available in a
common region are grouped by a leader called the
Regional leader. So each region can have a number
of RSD’s based on the how close agents are to each
other. Once the RSD is formed each agent votes for
a leader for representing the agents in a particular
region. Here the agents say {A, B, C, D, E} will bid
on the Job J1 along with A the elected leader by
forming new coalitions. The least loaded Coalition
having an optimal turn around time will get the job
based on the negotiated payoff value. R after
negotiations decides upon selecting the best
coalition for the job and offloads the job for job
processing. The primary use of the RSD leader is to
represent a set of closely-knit agents to minimize the
communication costs between the agents and the
APM.
4 COALITION FORMATION
METHODOLOGY
This architecture allows agents to dynamically form
coalitions in order to bid for, executing tasks. Firstly
the job description will be broadcast to all agents of
the RSD. Agents exchange information with respect
to their present ability to perform the tasks. The
information is composed of a set of attributes that
explains the current state of the agents. There is a
utility function that assigns a utility to the coalition.
The utility function takes the attributes of all the
coalition members and computes a utility that
indicates which coalitions are suitable for the tasks.
Agents then try to form coalitions based on this
indicative utility. Agents decide to join a coalition if
they are offered a payoff, which is not less than a
payoff threshold computed individually.
4.1 Ranking by Indicative Utility
The information is a set of attributes or properties
that affect the way jobs are to be processed by
agents and their respective peers. Attributes in
agent-based grids can be the load of machine, turn
around time of a process, latency, QoS factor,
bandwidth requirement, distance, etc. Each agent
maintains an attribute table, which contains all other
agents attributes it collects after the exchanging of
information. Based on the table shown in Figure 4
we can assume that each job is associated with an
attributed value with respect to the properties
associated by that attribute. Based on this we can
compute the utility value for each agent by. The
figure 4 indicates that Agents A, B and C have A1
…. A3 attributes which are needed for computing
the utility value of each potential coalition based on
the attributes of the job. Each agent can then
compute all the possible coalitions it may form.
These coalitions are ones that each agent would like
to propose to other agents. The agent uses each
coalition in this list as a proposal for forming
potential coalitions. It then computes the utility
value for each coalition. The utility value indicates
how well a coalition can perform a task. The utility
can be computed by applying a LESS or a MORE
value with respect to the properties of the attribute.
For example if we were computing the Load of
individual agents then its useful to have a less loaded
system than that of the jobs attribute value. So a
coalition formation will lead to an average of loads
to compute the average value of the potential
coalition and a LESS is specified for computing the
validity of the potential coalition formation between
say agents A and B. The agent then ranks coalitions
based on their utility values in a ranking table called
RTable in descending order. In the case that the
multiple coalitions yield the same utility value, then
smaller coalitions are preferred. Based on the
ranking table RTable the best coalition formation
strategy is deployed. The price for executing the job
successfully will be equally distributed among the
coalition members as their individual payoffs.
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
172

4.2 Coalition Formation Protocol and
Decision Making
Step 1: R is a remote node that needs to offload its
job say J1. R sends a Job Description message say
<ID, Job desc, T, A1, A2...An> to the APM for the
job J1. A set of attributes such as Latency, Time of
Completion, Payoff, etc is defined as A1, A2, A3
…An.
Step 2: The APM in turn sends a message to the
Regional service Domain [RSD] leader which in
turn advertises the job J1 to its local agents for
dynamic coalition formation.
Step 3: Let us take an agent A that is interested in
computing the job J1.
Step 4: To compute potentially good coalitions,
agent A sends messages to all other agents in the
RSD querying for the attributes as shown in Fig 4.
Step 5: Each agent uses an internal table to compute
the indicative utility and ranks the coalitions in
descending order in a ranking table RTable. Now
agents have the capability to decide which agents are
suitable for coalition formation.
Step 6: Each agent now computes individual payoff
for each coalition member in all coalitions by
distributing the price of the job equally.
Step 7: Each agent selects all the coalition members
from its top proposal based on its ranking table
RTable and then sends out a message <ID, coalition,
payoff vector> (ID is identity of the requestor while
payoff vector specifies the individual payoff for each
coalition member) to all agents in that proposal.
Step 8: Each receiving agent compares its individual
payoffs, Xi, in the proposed payoff vectors and
compares them to the payoff Xi* in its top individual
proposal. If
Xi >= Xi*
then agents reply with ACK, or else with a NO-ACK
signal.
Step 9: If the Head of the coalition receives ACK
signal from all the coalition members, it declares
that a coalition is formed and the task is bided for by
the new coalition that is formed.
Step 10: And if the requestor receives a NO-ACK, it
decreases its payoff Ui* in the top payoff vector by a
certain value, i.e. ∅ then increases the payoff Uj*
for all other coalition member by ∅ / (|S|-1), where
|S| is the size of the coalition. If the new Ui* is less
than the equivalent payoff in the second payoff
vector then delete the top proposal Repeat step 7.
Step 11: The newly formed Coalitions then bid for
the job J1 by negotiating with the originator R to
obtain the job J1. The negotiation can involve
comparison of attributes such as payoff value, goals
of agents, etc, to negotiate for J1.
Step 12: R then compares and contrasts the attributes
of the coalitions and then offloads to the best
negotiated coalition formation available for its job
namely J1.
Step 13: As soon the job J1 is allocated to a specific
coalition, all the other coalitions are dispersed to
form autonomous agents once more.
Step 14: The selected coalition then performs the
Job J1 and on completion sends a finished FACK
status to the originator R of job J1; it then receives
its payoff for the job and disperses the coalition to
join the host of autonomous agents in the RSD to
become autonomous once more.
Step 15: Continue back to Step 1 for originator of
new jobs and coalitions respectively.
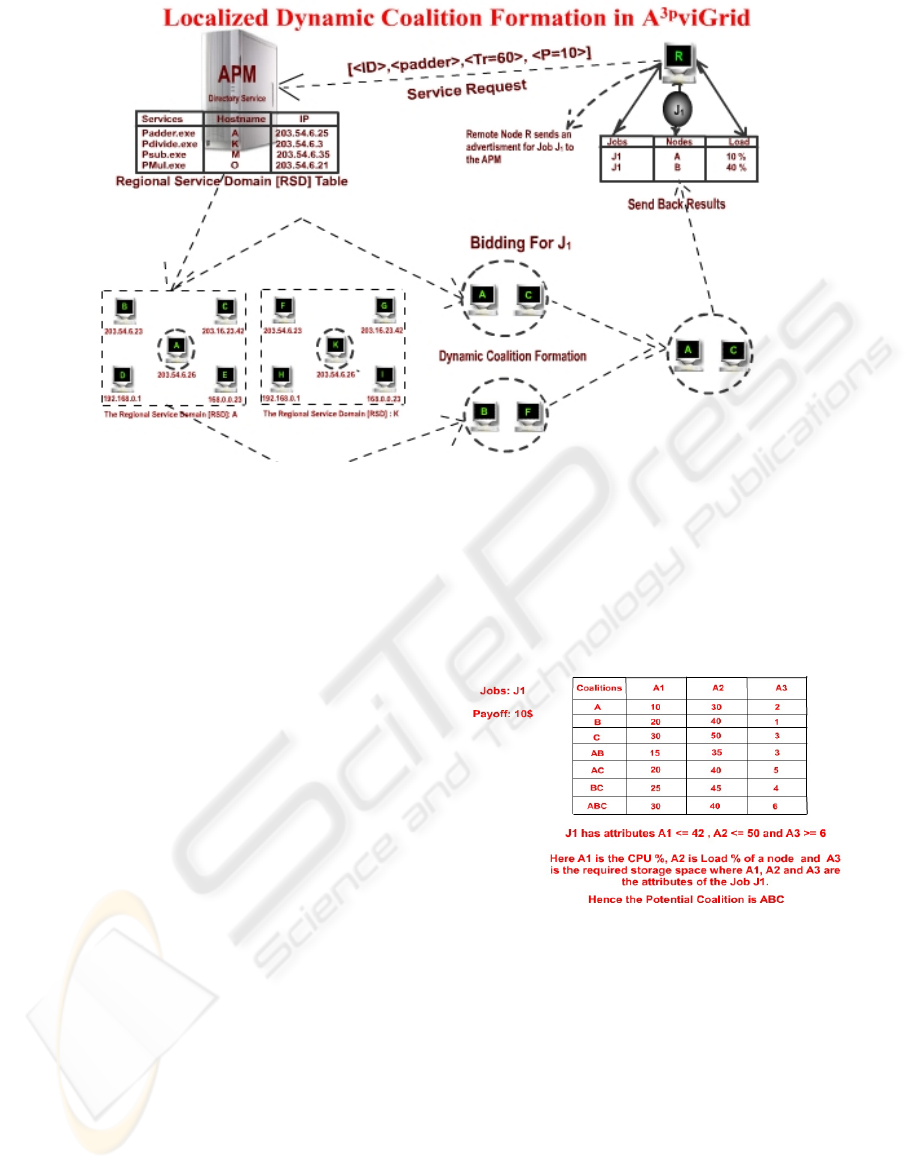
Figure 2: Location Based Dynamic Coalition
DYNAMIC COALITION IN AGENT AWARE ADHOC VIRTUAL P2P INTERCONNECT GRID COMPUTING
SYSTEM – A3PVIGRID
173
5 EXAMPLE OF APPLYING
DYNAMIC COALITION TO THE
A
3p
viGrid SYSTEM.
As shown in Fig 3, there is a remote node R with IP
address 203.54.6.35 and has a Job processing
requirement called J1. The APM stores information
about the locations of the regional agents and there
services. An example of an attribute can be the
turnaround time, Latency, Payoff, etc. When node R
wants to execute the job J1, it authenticates itself
with the APM by sending its IP address say
203.54.6.35; sends an advertisement about a remote
Job J1 that has a requirement for a service called
padder.exe to the APM. Based on the location of R
and the services requested, the APM passes the
request to the respective regional service domains
[RSD] leader A. Attributes are properties that are
adhered to by the agents based on self-interests. So
each agent is specifically interested in job processing
based on a set of special value attributes that plays
an important role in the way jobs are processed.
Attributes can be anything from resource
requirements, latency to trust issues with respect to
agents and the originator of the job. As shown in
Figure 4 we can see that A1…..A3 are the attributes
values of CPU %, Load % and Storage. Now each
agent based on the properties of its environment will
agree or are bound to satisfy certain attribute values.
As shown in the figure, let A, B and C be three
agents having different attribute values. Whenever
an agent satisfies an attribute value, the agent puts
its calculated value to compute utility value of the
potential coalition based on the available attributes
of its immediate environment. Attributes based on
the job description tend to form the basis for agents
to form coalitions. Our example denotes attribute
values to be properties which affect the way jobs are
being processed by agents and their respective peers.
Attributes with respect to agent based Grids can be
the Load of a machine {A1}, turnaround time of a
process {A2}, Latency {A3}, QOS factors {A4},
Bandwidth requirement {A5}, distance {A6}, etc.
As shown in Figure 4 let job J1 that originated from
remote node R have the following three attributes
that needs to be satisfied in order to do job
processing. Now we can see that A1…..A3 are the
attributes having CPU %, Load % and Storage
computed approximately for processing job J1. The
attributes become a requirement here for job
processing. Each agent say A, B, C compute their
individual values and the appropriate potential
coalitions by comparing which potential coalitions
formations tries to satisfy the attributes of the Job J1
to the fullest. As we can A, B and C first check to
see if they satisfy the requirements of the Job J1
independently before proposals are sent for
coalition formation. Then a set of possible coalitions
Fi
g
ure 3: A
pp
l
y
in
g
D
y
namic Coalition in A3
p
viGrid Schematic
Fi
g
ure 4: Com
p
utin
g
Potential Coalitions
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
174

proposals are formulated and computed based on the
attributes available. Let us take one of the attributes
say Load % to examine how the computation works.
For every value computed we see if a LESS or
MORE value is required by that attribute. That is
Job J1 here needs the load of a system to be less than
or equal to 50% then we compute every possible
coalitions and do an average of the loads for all the
coalitions to see if they satisfy the load value say <=
50%. As shown all the possible coalitions are
calculated and compared to see which of the
coalitions are <= 50% loaded. Similarly we need
storage space of 6 megabytes, and that becomes a
MORE as we need to have a system which can offer
6 or more number of megabytes for storage. For
attributes such as load or CPU we have to calculate
the average by dividing the sum with the number of
agents forming the coalition. After calculating the
LESS and MORE values of all the possible
coalitions the agent needs to decide which coalition
formation satisfies all or most of the requirements of
the Job J1. As we can see the coalition formation of
ABC seems to match all the criteria’s of the Job J1
and the next best coalition that satisfies most of the
requirements is AC that is ranked in the agents table
as a potential coalition in case ABC cannot be
formed. Each coalition then selects a leader to
represent the coalition to optimize on
communications with the RSD and the originator R.
The leaders associated with every coalition formed
starts to contact R and bids for the Job J1. Hence we
have computed the utility value for potential
coalitions and the best coalition available to the
agent is used for bidding. The list of potential
coalitions after accepting the proposals will form
coalition to bid for the Job J1 and after negotiations
with respect to payoffs the agents will perform the
Job J1. Coalitions are dispersed once the selected
coalition is allocated for job processing and when
the Job is finished the Agents break the Coalition
formation and become autonomous as they join the
RSD again. Two or more Coalitions can also be
maintained by the remote peer R to achieve fault
tolerance with respect to job processing. Thus
dynamic coalition in agents tries to provide a good
solution to Agent based service oriented Grid
computing systems where best possible coalitions
are computed to provide optimal job processing
among agents.
6 LIMITATIONS
The primary limitations posed by dynamic coalition
in agents is that coalition formation might take more
time than expected due to the negotiations among
the agents. The other problem associated with agents
is the possibility of not bidding for a Job and doing
Job processing at all due to their autonomous
properties such as different goals or dissimilarities
observed in agents.
7 CONCLUSION
Applying Dynamic Coalition methodologies to
Multi Agent based High performance Grid
computing systems has lead to a new perspective to
the usage of intelligent agents in Grid computing
systems. The A
3p
viGrid tries to provide solutions to
minimizing the usage of Resource discovery models
and process analyzers by utilizing directory services
such as the APM and the effective usage of dynamic
coalition schemes. Local coalitions are dynamically
formed by intelligent agents having a commonality
of goals based on a service oriented schematic.
REFERENCES
Andrew S. Tanenbaum and Robbert Van Renesse; ACM
Comput. Surv. 17, 4 (Dec. 1985), Distributed
Operating Systems, Pages 419 - 470.
Avinash Shankar, Daniel Saffioti, Ian Piper, Ashwin
Shankar, June 21st – 24th 2004, “Service Oriented
Web Based Meta Resource Sharing Platform - The
CBWeB
Portal “. The 2005 International Conference on Parallel
and Distributed Processing Techniques and
Applications, CSREA Press, Pages 744-749
Justin R.D. Dyson, Nathan E. Griffiths, Hélène N. Lim
Choi Keung, Stephen A. Jarvis, Graham R. Nudd,
Trust in Agents for Grid Computing.
Condor Cycle Stealing Technology – Condor / Condor -
G, www.cs.wisc.edu/condor/, Last accessed 6/3/2004
File Sharing applications - Bearshare, Kazza, Gnutella,
www.zeropaid.com, Last visited 5/01/2005
Grid Computing Definition - Source:
http://www.huihoo.com/grid/grid_computing_info_ce
ntre.htm, Last accessed: 5/01/2005
Open LDAP directory service protocol - Source:
www.openldap.org, Last accessed: 24/6/2004
P2PJXTA Framework - www.openp2p.com Last visited
5/01/2005
Sun Microsystems JXTA Framework - www.jxta.org Last
accessed: 5/01/2005
The TeraGrid Project - www.teragrid.org
UK’s E-Science Project - Source: www.escience-
grid.org.uk, Last accessed: 5/01/2005
DYNAMIC COALITION IN AGENT AWARE ADHOC VIRTUAL P2P INTERCONNECT GRID COMPUTING
SYSTEM – A3PVIGRID
175
