
AUTOJOIN: PROVIDING FREEDOM FROM SPECIFYING JOINS
Terrence Mason
Iowa Database and Emerging Applications Laboratory, Computer Science
University of Iowa
Lixin Wang
Iowa Database and Emerging Applications Laboratory
University of Iowa
Ramon Lawrence
Iowa Database and Emerging Applications Laboratory, Computer Science
University of Iowa
Keywords:
Inference, Query, Interface, Schema, Ambiguity, Database.
Abstract:
SQL is not appropriate for casual users as it requires understanding relational schemas and how to construct
joins. Many new query interfaces insulate users from the logical structure of the database, but they require
the automatic discovery of valid joins. Although specific query interfaces implement join determination algo-
rithms, they are tied to the specific language and typically limited in scope or scalability. AutoJoin provides a
general solution to the query inference problem, which allows more complex queries to be executed on larger
and more complicated schemas. It enumerates query interpretations at least an order of magnitude faster than
previous methods. In addition, the engine reduces the number of queries considered ambiguous. Experimen-
tal results demonstrate that query inference can be efficiently performed on large, complex schemas allowing
simpler access to databases through keyword search or conceptual query languages. AutoJoin also provides
programmers with a tool to iteratively create SQL queries without requiring explicit knowledge of the structure
of a database.
1 INTRODUCTION
Despite significant improvement in the performance
of database systems, the usability of databases has
not improved at a similar pace. Although more us-
able query interfaces, including conceptual, graphi-
cal, and keyword languages, have been developed,
they require the automatic determination of joins to
complete the queries. The lack of a consistent join de-
termination approach, which scales to large schemas,
continues to limit the capabilities of new query inter-
faces. Even worse, the size and complexity of data-
base schemas continues to grow, especially as global
schemas are constructed for integrated systems. Users
need a simpler method for querying larger and more
complicated databases.
One of the major challenges in generating SQL
queries is using joins to connect concepts or attributes
located in different tables. Constructing these joins in
SQL or through a graphical query interface is tedious,
error-prone, and not intuitive to casual users (Catarci,
2000). Recent research using keyword searches on
relational databases (Hristidis and Papakonstantinou,
2002; Balmin et al., 2004; Agrawal et al., 2002)
allows the extraction of data without any required
knowledge about the schema or metadata. These
interfaces match keywords either to the data or the
metadata of a database, which then requires the deter-
mination of the joins to relate the relations containing
the keywords.
Our goal is to produce a query inference engine that
dynamically converts an attribute-only or keyword
query to SQL. For example, consider the equivalent
keyword, conceptual and SQL queries on the TPC-H
1
schema shown in Figure 1. It is desirable for the query
system to automatically infer the SQL query from the
simpler keyword and conceptual queries. This allows
the creation of SQL queries without requiring explicit
knowledge of the database.
The challenge is to make query inference efficient,
general, and practical for use in production databases.
The query inference system should be query language
independent to not restrict join determination to a par-
ticular query language. It also is critical that the over-
head of query inference be minimal even for very
large schemas.
Although ambiguity cannot be eliminated by a
query inference strategy (since it is inherent in the
1
http://www.tpc.org/tpch/
31
Mason T., Wang L. and Lawrence R. (2005).
AUTOJOIN: PROVIDING FREEDOM FROM SPECIFYING JOINS.
In Proceedings of the Seventh Inter national Conference on Enterprise Information Systems, pages 31-38
DOI: 10.5220/0002516100310038
Copyright
c
SciTePress

Keyword Query:
Part ‘United States’
Conceptual Query:
select Part.Name
where Nation.Name = ‘United States’
SQL Query:
select P.name
from part P, nation N, lineitem LI,
orders O, customer C
where N.name = ‘United States’
and P.partkey = LI.partkey
and O.custkey = C.custkey
and C.nationkey = N.nationkey
and LI.orderkey = O.orderkey
Figure 1: Equivalent Keyword, Conceptual, and Inferred
SQL Queries on TPC-H
relational schema), approaches to recognize and deal
with ambiguity are necessary to make query inference
valuable. Two specific forms of ambiguity that may
lead to multiple query interpretations are addressed.
In addition, schemas may have multiple sets of joins
that are equivalent in their semantic meaning. By
identifying and reducing these duplicate join paths to
a single core path, ambiguity is reduced.
The AutoJoin inference engine efficiently ex-
tends the capabilities of previous inference ap-
proaches, while maintaining independence from par-
ticular query languages or interfaces. The individual
contributions of AutoJoin are:
• An algorithm called EMO that efficiently con-
structs all maximal sets of lossless joins in a
schema. EMO significantly outperforms previous
approaches that fail on large schemas.
• A method for reducing the number of ambiguous
queries by detecting and removing semantically
equivalent interpretations.
• Efficient algorithms for generating query interpre-
tations at query execution time.
• An extension of the lossless join approach to gen-
erate queries with a lossy join.
• A performance study that demonstrates the ap-
proach is scalable.
The rest of this paper is organized as follows. Sec-
tion 2 provides background on query inference strate-
gies. Section 3 presents the AutoJoin inference en-
gine along with the join graph structure. Section 4 de-
scribes the overall strategy for precomputing the loss-
less join trees by the EMO algorithm. Efficient join
determination algorithms are presented in Section 5.
A performance study in Section 6 shows that query
inference can be performed with minimal overhead
even for large schemas. The paper then closes with
future work and conclusions.
2 BACKGROUND
State of the art database interfaces require query in-
ference, as users should not be required to know the
schema and structure of the database queried. Key-
word searches along with natural language query-
ing require an efficient, scalable, and general strat-
egy to discover joins for query execution . An ideal
query inference engine would automatically apply to
existing relational schemas without administrator in-
tervention, quickly pre-compute the necessary data
structures to minimize overhead during query execu-
tion, and return a ranked list of query interpretations
based on specifications from the query interface.
The Universal Relation provided the first interface
which required query inference. The lossless join
property related to functional dependencies provided
the mechanism to determine the joins required to
complete the query (Maier and Ullman, 1983). If
more than one lossless interpretation exists, the in-
ferred query results in the union of all the unique loss-
less queries. In another approach, the query with the
lowest cost (Wald and Sorenson, 1984) is selected as
the inferred query. The cost function first identifies
a lossless interpretation. If lossless joins do not ex-
ist for the query, lossy joins are permitted. These two
approaches both infer a single query, while new inter-
faces require a ranked list of interpretations.
The pursuit of simpler interfaces for relational data-
bases has led to varying methods of join determina-
tion. Each keyword search interface has developed
their own algorithm to address the challenges of find-
ing the k-lowest cost query interpretations for a set of
keywords. Discover (Hristidis and Papakonstantinou,
2002) grows all ways from a relation containing one
of the keywords with a limit on the number of joins
permitted between relations. This inefficiently gener-
ates extra graphs that do not contain all the keywords.
DBXplorer (Agrawal et al., 2002) identifies the lo-
cation of keywords through an efficient symbol table
and then infers the joins required for query interpreta-
tions by generating spanning trees. Neither approach
maintains the lossless property in their cost functions
and all computations occur at query time.
Conceptual query languages aim to hide the com-
plexity of the schema from users by mapping con-
cepts familiar to the user to the relational model.
Again, these languages require the identification of
joins to complete the query. CQL (Owei and Navathe,
2001) uses a shortest path algorithm to find the mini-
mum join paths between specified concepts resulting
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
32
in a single query interpretation. Another conceptual
model (Zhang et al., 1999) requires an administrator
to semi-automatically generate and annotate a seman-
tic graph of the database and then uses a search al-
gorithm constrained by limiting both the number of
joins and interpretations generated. Natural language
interfaces (Popescu et al., 2003) map a natural lan-
guage query to concepts represented in the database,
then the joins required to connect all concepts must
be determined.
Obviously, query inference is critical to the devel-
opment of advanced user interfaces. However, each
inference system directly links their join determina-
tion algorithms to a specific query interface with a
hard-coded mapping algorithm to generate the SQL
query. These solutions are inherently not config-
urable. The goal is to isolate query inference at the
schema level away from the query interface, to focus
on the overall challenges of query inference. By solv-
ing the query inference problem in general, the Auto-
Join inference engine will allow the development of
query interfaces without the constraint of a specific
join determination algorithm.
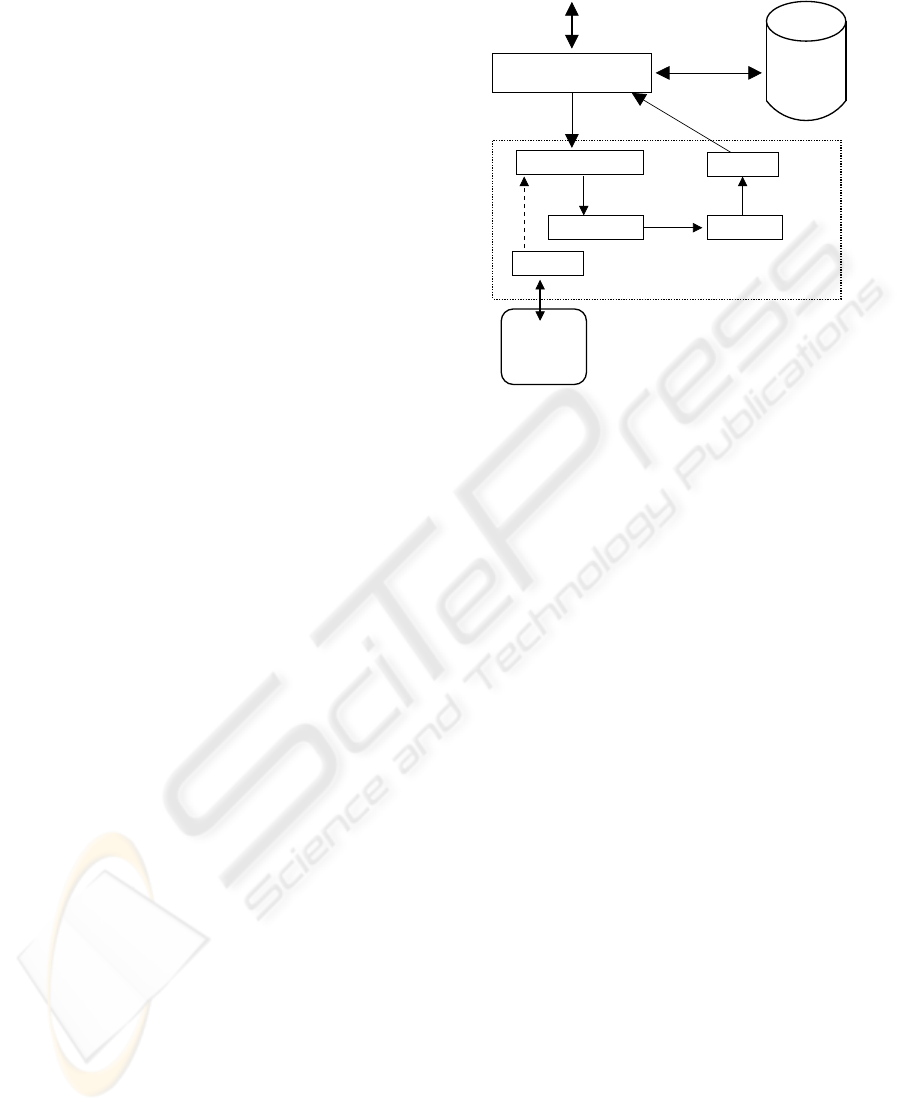
3 ARCHITECTURE
The AutoJoin architecture consists of a pre-
processing step to identify maximal lossless joins
and a query-time inference engine to determine joins
for the query interface. In the pre-processing step,
schema information is extracted from relational data-
bases using standard API calls and stored in a generic
schema representation called a join graph. The at-
tributes and relations are optionally annotated to im-
prove names and reduce ambiguity. Next, the sys-
tem computes the maximal lossless joins and stores
all information into an XML document for future
QueryBuilder loads.
The query interface (see Figure 2) may be any text
language or graphical query tool. The query inter-
face allows the user to enter queries and then trans-
lates the user’s query into a set of nodes and edges on
the join graph. Nodes represent relations and edges
represent joins. The query interface may provide a
cost function, mapping costs to edges and nodes to
rank the interpretations. The QueryBuilder takes
this information and uses the pre-computed informa-
tion to enumerate the potential interpretations. The
Generator constructs all interpretations and passes
them to the Ranker which uses any supplied rank-
ing function to order the interpretations. Finally, the
query interface uses the Iterator to return the in-
terpretations in rank order. The query interface then
executes the queries on the database. Since the ar-
chitecture only requires the query interface to specify
Document
XML
Iterator
Loader
RankerGenerator
QueryBuilder
Query Interface
User
Database
Relational
Interpretations
Inference Request
AutoJoin QI Engine
(interpretations)
Execute queries
Figure 2: AutoJoin Architecture
the nodes of interest, the query interface has complete
control over the inference process. The key compo-
nents of the architecture are discussed in the follow-
ing sections.
3.1 Representing Joins of a Schema
The potential joins in a relational schema are repre-
sented by a directed graph called a join graph.
Definition 1 A join graph JG = (N, E) for rela-
tional database schema S is a directed graph where:
• Each relational schema R
i
∈ S is represented as a
node n
i
∈ N .
• There is a directed edge e = (n
i
, n
j
) ∈ E from
node n
i
(relation R
i
) to node n
j
(relation R
j
) if
there exists a foreign key constraint of the form
R
i
[A] ⊆ R
j
[B] where A and B are subsets of the
attributes of R
i
and R
j
respectively.
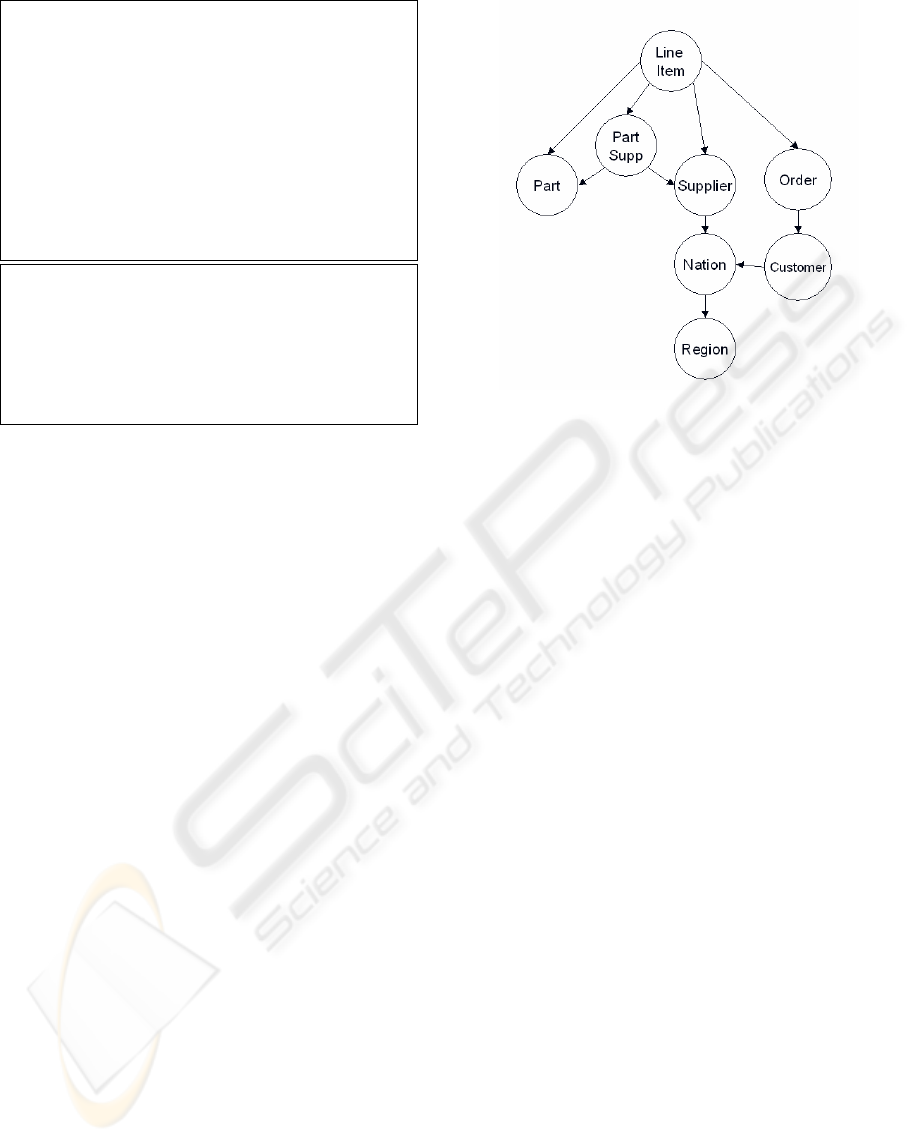
A join graph can be automatically built from an ex-
isting relational schema by extracting relation names
and foreign key constraints. The example TPC-H
schema used throughout this paper is in Figure 3, and
its associated join graph is in Figure 4. Joins may be
added to the join graph to identify additional potential
joins. It is possible to have multiple edges between
two nodes if there are two or more foreign keys be-
tween them. Determining the maximal set of lossless
joins reduces to the problem of finding all connected,
maximal subtrees of the join graph, as the lossless
property is captured in the direction of the edges.
We now formally define the meaning of a query,
query interpretation, and query inference.
AUTOJOIN: PROVIDING FREEDOM FROM SPECIFYING JOINS
33
part(partkey, name, mfgr, brand, type, size,
container, retailprice, comment)
supplier(supkey, name, address, nationkey, phone,
acctbal, comment)
partsupp(partkey,supkey,availqty,supcost)
customer(custkey,name,address,nationkey,phone,
acctbal, mktsegment,comment)
orders(orderkey, custkey, status, totalprice, orderdate,
priority, clerk, shippriority, comment)
lineitem(orderkey, partkey, supkey, linenumber, qty,
extendprice, discount, status, shipdate)
nation(nationkey, name, regionkey, comment)
region(regionkey, name, comment)
lineitem(partkey)⊆partsupp(partkey)⊆part(partkey)
lineitem(supkey)⊆partsupp(supkey)⊆supplier(supkey)
lineitem(partkey,supkey)⊆partsupp(partkey,supkey)
orders(custkey)⊆customer(custkey)
customer(nationkey)⊆nation(nationkey)
supplier(nationkey)⊆nation(nationkey)
lineitem(orderkey)⊆orders(orderkey)
nation(regionkey)⊆region(regionkey)
Figure 3: Abbreviated TPC-H Schema
Definition 2 A user query Q = (N
′
, E
′
) on a join
graph J G = (N, E) is a subgraph of J G such that
N
′
⊆ N and E
′
⊆ E.
For use in query inference, a user query reduces
to a set of specified nodes (relations) and edges (nat-
ural joins). A node is specified if one or more of its
attributes are required for a selection, projection, or-
dering, or grouping operation. A specified edge is a
natural join condition explicitly given by the user. The
query interface must translate the user query into the
required form.
Definition 3 A query interpretation QI = (N
′
, E
′
)
on a join graph JG = (N, E) is a connected sub-
graph of JG such that N
′
⊆ N and E
′
⊆ E.
A query interpretation is usually a tree, but may be
a graph. We use the terms join tree to represent loss-
less joins and lossy join interpretation for query in-
terpretations that include a lossy join. An ambiguous
query has multiple join trees. A query may be unam-
biguous (single join tree) even if the schema contains
ambiguity.
Definition 4 The query inference problem requires
enumerating and ranking query interpretations of a
query such that the query interpretation desired by the
user is among the highest ranked interpretations.
Previously, query inference was defined as select-
ing a single interpretation for the user. This is im-
practical because a system will never be able to se-
lect the correct interpretation for every situation. We
re-formulate the query inference problem as an infor-
mation retrieval problem. The goal of query infer-
ence is to enumerate potential query interpretations
Figure 4: Join Graph for TPC-H Database
and present them to the user in order of the likelihood
that the interpretation is what the user intends. This
is similar to how a web search engine ranks pages
according to the expected value for the user. Query
inference then becomes two related problems. First,
given a subset of nodes and edges of the join graph,
the system must enumerate the possible connections
between them. Then, it will rank the interpretations
based on the specified cost function.
4 PRECOMPUTING LOSSLESS
JOINS
As the maximal sets of lossless joins depend solely on
the ambiguity inherent in the schema and not on the
input of a specific query, the maximal sets of lossless
joins for the schema are precomputed. This moves the
bulk of the computation from query time to a one time
precomputation. If there is no ambiguity in a schema,
then query inference is trivial with only one possible
interpretation for any query. AutoJoin is designed to
infer queries on schemas with ambiguity. There are
two common sources of ambiguity in schemas:
• A single relation storing an entity that plays mul-
tiple roles results in a node in the join graph with
two or more incoming edges.
• Multiple semantic relationships between entities
result in directed cycles and strongly connected
components in the join graph.
The first source of ambiguity is common as
schemas have shared lookup tables used by multiple
relations. An example in TPC-H is Nation that serves
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
34

the two semantic roles of storing the nation of cus-
tomers and the nation of suppliers. This form of am-
biguity arises when distinct attributes have the same
underlying domain of values. An example of the sec-
ond source of ambiguity is a database storing employ-
ees and departments where an employee has a depart-
ment and a department has a manager (which is also
an employee). These two relationships result in a di-
rected cycle between employee and department in the
join graph. The number of query interpretations is
dictated by the ambiguity inherent in the schema.
4.1 Removing Shortcut Joins
Semantically equivalent query interpretations with
distinct sets of joins may exist in a database schema.
It is critical that these equivalent joins be detected
and only the core semantic join path preserved in the
join graph, otherwise queries may be incorrectly de-
termined to be ambiguous. A shortcut join is a join
between two relations that is semantically equivalent
to a longer join path of two or more edges. This is
especially common in hierarchically structured data-
bases where the primary key of one relation contains
the primary key of its parent relation. We denote a
natural join on foreign key attributes X between two
relations R
i
and R
j
as R
i
⊲⊳
X
R
j
. To simplify the
discussion, the set of attributes X is assumed to have
the same name in both relations, although in practice
this is not required.
Definition 5 A shortcut join between two relations R
i
and R
j
is a natural join on attributes X where X ⊆
R
i
and X ⊆ R
j
and there exists a join path R
i
⊲⊳
X
1
T
1
⊲⊳
X
2
T
2
⊲⊳
X
3
... ⊲⊳
X
n
T
n
⊲⊳
Z
R
j
where Z = X
and Z ⊆ X
n
⊆ X
n−1
... ⊆ X
1
.
A shortcut join is equivalent to the longer join path
based on functional dependencies. The functional de-
pendency R
i
[X] → R
j
of the shortcut join is equiv-
alent to R
i
[Y ] → T [Z] → R
j
since X ⊆ Y and
Z = X. Shortcut joins can be detected while build-
ing the join graph. If a relation R
i
has two foreign
keys on sets of attributes Y and X to relations R
j
and
R
k
respectively, where X ⊂ Y then the join from R
i
to R
k
on X is a shortcut join and is not added to the
join graph. Shortcut joins are maintained in a list and
are re-inserted at query-time when the shortcut join
can be used to reduce query execution times.
There are two shortcut joins in the TPC-H schema:
LineItem to Part and LineItem to Supplier. By remov-
ing these joins, the number of maximal join trees in
Figure 5 is reduced from 8 to 2 (join trees 1 and 5),
and the number of unambiguous queries increases to
26% from 8% (Figure 8). At query-time, if a query
specifies only LineItem and Part, the path in the max-
imal join tree will be: LineItem-PartSupp-Part which
Figure 5: Maximal Join Trees for TPC-H Database
is replaced by the shortcut join LineItem-Part, as Part-
Supp is not required in the query.
4.2 Generating Maximal Join Trees
Previous approaches for generating maximal sets of
lossless joins (join trees) expanded in all possible di-
rections. The growing algorithm was inefficient, and
often non-computable, for large graphs. Our approach
constructs the sets of joins without expanding in all
possible ways by growing maximal join trees only
from identified roots. Since lossless joins are trees,
a root of a join tree cannot be a node with an incom-
ing edge unless that node is in a strongly connected
component (SCC). The algorithm identifies nodes that
have only outgoing edges or are in a strongly con-
nected component with no incoming edges from out-
side the component. Only those nodes can be roots of
maximal lossless joins. From each root, the reachable
subgraph is found by traversing directed edges and an
algorithm for calculating all spanning trees (Gabow
and Myers, 1978) of the reachable graph is used to
find all maximal lossless joins for each subgraph. Re-
peating the process for every potential root produces
all join sets without constructing any duplicates. The
algorithm is in Figure 6.
As the number of spanning trees may be exponen-
tial (such as for a completely connected graph), the
performance of the algorithm in the worst-case is ex-
ponential. In practice, database schemas do not ex-
hibit the worst case and tend to have a reasonable
number of maximal join trees. EMO outperforms a
grow all ways approach both in time and number of
edges and nodes visited. The performance improve-
ment is because EMO does not duplicate effort and
grows only from valid roots.
The following proofs demonstrate the correctness
of the algorithm by showing that EMO generates all
maximal join trees and only valid maximal join trees.
AUTOJOIN: PROVIDING FREEDOM FROM SPECIFYING JOINS
35

EMO (JoinGraph dg, List maxObjs)
{
allSCC = strongly connected components of dg
rGraphs = ∅
for each scc in allSCC
if (size scc == 1 and node has no in-edges)
rGraphs = rGraphs ∪ findReachable(n);
else
for each node n in scc
if (n has no in-edges from outside scc)
rGraphs = rGraphs ∪ findReachable(n);
maxObjs = ∅
for each reachable graph g in rGraphs
maxObjs = maxObjs ∪ g.findSpanningTrees()
}
Figure 6: EMO Algorithm
Theorem 1 EMO produces all maximal join trees.
Proof: Proof by contradiction. Let A be a maximal
join tree that is not produced by EMO. Let r be the
root of A. Let C be the strongly connected component
containing r.
Case 1: If C contains only one element, then r must
have no incoming edges. Otherwise, suppose it has
incoming edge (x, r). Adding (x, r) to A will pro-
duce a bigger tree containing A. That contradicts the
fact that A is a maximal join tree. So EMO will find
the reachable graph of r.
Case 2: If C contains more than one element, then
EMO finds the reachable graph of every node in C
with no incoming edges from outside C. If r has no
incoming edges from outside C, EMO will find the
reachable graph of r. If r has incoming edges from
outside C, then similar to Case 1, A is not a maximal
join tree.
In either case, A is one of the spanning trees of the
reachable graph of r. Thus, A is produced by EMO.
Theorem 2 Any spanning tree produced by EMO is
a unique maximal join tree.
Proof: Proof by contradiction. Suppose A is a tree
produced by EMO, but A is not a maximal join tree.
Then A must be a subtree of some maximal join tree
B. By Theorem 1, EMO produces B.
Case 1: Suppose A and B have the same root r.
Then A and B are both spanning trees of the reach-
able graph of r. This contradicts the fact that A is a
smaller tree contained in B.
Case 2: Suppose the root rA of A is contained in
B but is not the root of B. Then rA must have an
incoming edge e = (x, rA) where x is not contained
in A. EMO would not have found the reachable graph
for rA if it had an incoming edge unless rA was in a
strongly connected component C. Edge e may be an
incoming edge from outside C or an edge within C.
If it is an edge in C, x must be in A since x would be
reachable from rA. A contradiction as x is not in A. If
e is an incoming edge from outside C, then EMO will
not produce a spanning tree of the reachable graph
from rA. Thus, A would never be produced.
5 QUERY-TIME PROCESSING
It is critical to efficiently translate a user query into
one or more query interpretations for the relational
database. This computation will occur for every
query, where as the determination of maximal join
trees is performed only once. The strategy involves
quickly identifying and ranking all unique lossless in-
terpretations of the user query, then if necessary gen-
erating the join possibilities with a lossy join. The al-
gorithm for generating query interpretations executes
the following steps:
• Identify the maximal join trees that contain all the
user specified nodes (and edges).
• Prune identified trees to unique query interpreta-
tions, such that all leaf nodes are specified nodes.
• If required, generate all join graphs with a single
lossy join.
• Rank interpretations by the specified cost function
or default to minimal number of edges (joins).
To minimize processing time, several performance
improvements are implemented. First, AutoJoin pre-
computes a reverse index where each relation (node)
links to all the join trees containing this node. The in-
tersection of the sets of join trees results in all of the
unique join trees for the specified nodes. Second, in-
stead of recursively pruning leaf nodes of the maximal
join tree, a minimal join tree is built by performing a
union of the paths from the least common ancestor
of all requested nodes to each requested node. The
ancestor lists are precomputed with the maximal join
trees prior to query time.
5.1 Extension to Lossy Joins
For queries that do not have a lossless interpretation
or require additional interpretations, query interpreta-
tions involving a lossy join are generated. These addi-
tional interpretations are created by the union of pairs
of maximal join trees that together contain all the re-
quested nodes and have at least one node in common.
The union of these join trees will contain one or more
nodes with more than one incoming edge. A prune
method generates all minimal interpretations with a
single lossy join. The AutoJoin inference engine gen-
erates query interpretations as a connected graph con-
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
36
taining all of the specified nodes with a single node
having two incoming edges.
5.2 Beyond Natural Joins
The main focus of this work is on natural joins of for-
eign keys as they are the most common type of join.
However, query inference is not restricted to queries
with only natural joins. In general, any complex join
condition can be specified and the query inference en-
gine will infer any natural joins still required to com-
plete the query. A theta join is handled by merging
the two join nodes in the original join graph and up-
dating the edges. Due to EMO’s efficiency, it is pos-
sible to compute the maximal join trees for the mod-
ified join graph and apply the regular query inference
algorithm. Maier and Ullman provide a method for
inferring queries involving tuple variables (Maier and
Ullman, 1983). Tuple variables allow one or more
relations to occur in a query multiple times, allowing
for query inference of more complicated queries. Any
query interface built on the AutoJoin inference engine
may allow the user to specify such complex queries
by specifying additional nodes and edges required to
be in the query interpretations. Query inference can
be applied to any query including ones that use sub-
queries, complex join predicates and outer joins.
6 PERFORMANCE
EXPERIMENTS
The AutoJoin inference engine is implemented in Java
and uses the JDBC API to extract schema informa-
tion. All schemas are in production use at various or-
ganizations or extracted from the Internet. The largest
schema is caBIO from the NCI Cancer Grid project
(caBIG)
2
which contains 149 nodes, 213 edges, and
1253 maximal join trees. The experiments were per-
formed on a 1.3 GHz AMD Athlon with 512 MB of
memory running Windows XP.
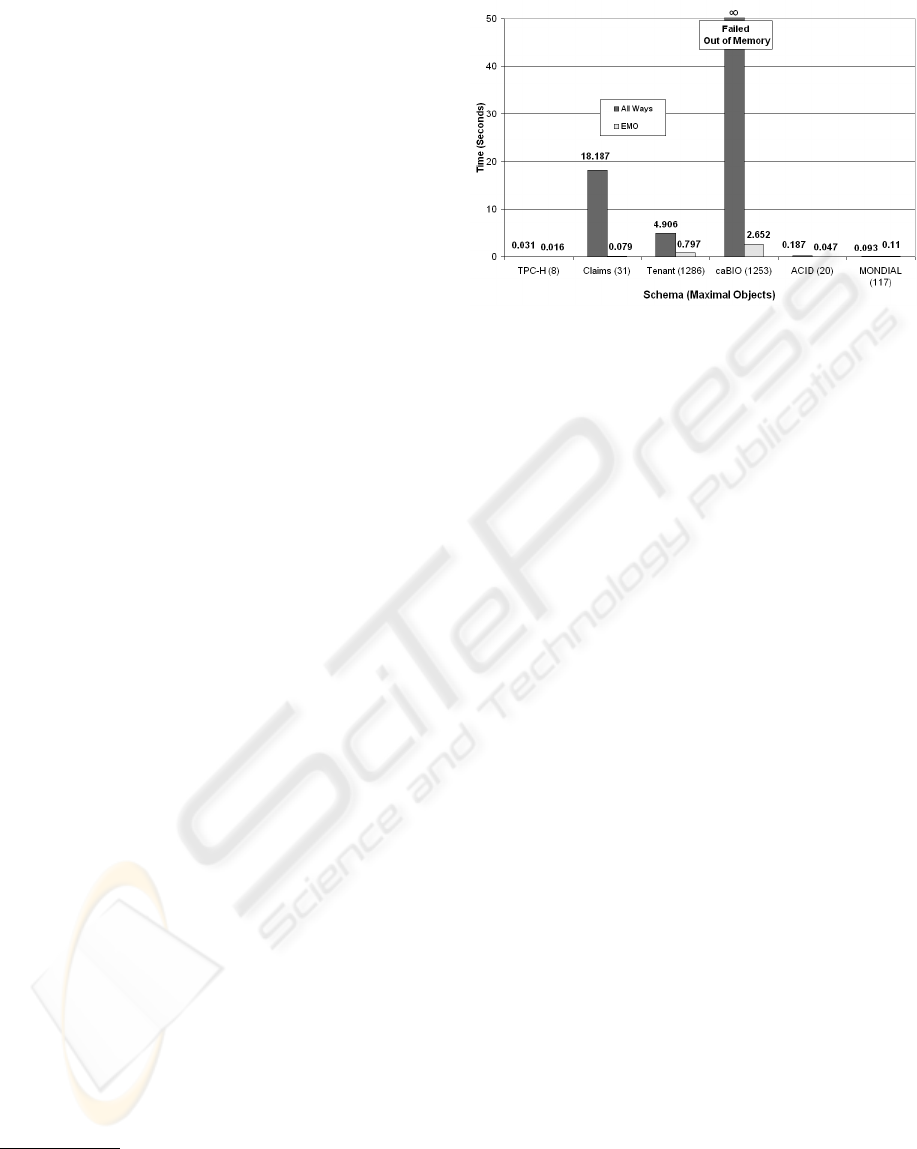
The first experiment compares the performance of
EMO with the grow all ways approach used in (Maier
and Ullman, 1983; Semmel and Mayfield, 1997; Hris-
tidis and Papakonstantinou, 2002). The results in Fig-
ure 7 show that EMO significantly outperforms the
grow all ways approach. The grow all ways approach
is very inefficient and cannot complete the caBIO
schema without running out of memory.
3
Both ap-
proaches are comparable for very small graphs. EMO
2
http://cabig.nci.nih.gov/
3
The grow all ways algorithm is either CPU or mem-
ory constrained depending on breadth first or depth first
growth. The DFS approach did not complete for the Claims
or CaBIO database.
Figure 7: Time to Compute Maximal Join Trees
outperforms on large graphs by an order of magni-
tude, which is especially important when schema evo-
lution is frequent. EMO is able to handle schemas
that could not even be processed by the existing ap-
proaches. EMO’s absolute performance is sufficiently
fast to support generation of maximal join trees at
query-time for almost all database schemas.
The second experiment determines how removing
shortcut joins reduces ambiguity. We use the TPC-H
schema and determine the percentage of queries that
are unambiguous before and after removing short-
cut joins. All 255 potential queries were treated as
equally likely (all queries of one table, of two tables,
etc.). Removing shortcut joins improved the number
of unambiguous queries from 8% to 26% (see Figure
8). Of the 22 benchmark TPC-H queries, removing
shortcut joins made 68% of the queries unambiguous
versus 45% originally. Several benchmark queries
contain nested subqueries. We consider a query to
be unambiguous if both the join tree for the subquery
and outer query is unambiguous. Query 5 contains
a lossy join, and two queries (7 and 8) require two
copies of Nation that must be specified by the user.
The hierarchical EDS schema shows an even greater
improvement by removing shortcut joins.
The overhead of performing query inference for
each query must be minimal. In a third experiment,
we determine the time to perform query inference on
various schemas. We calculated the average time to
infer the joins for the 22 benchmark TPC-H queries,
for all possible 255 TPC-H queries, and for two table
lossless queries in the other sample databases. As Fig-
ure 9 shows, the average query inference time is well
below 10 ms even for large schemas. Removing short-
cut joins improves the time for TPC-H. The inference
time for caBIO only slightly increases despite the sig-
nificantly larger schema size. By building query in-
terpretations using least common ancestor versus re-
AUTOJOIN: PROVIDING FREEDOM FROM SPECIFYING JOINS
37
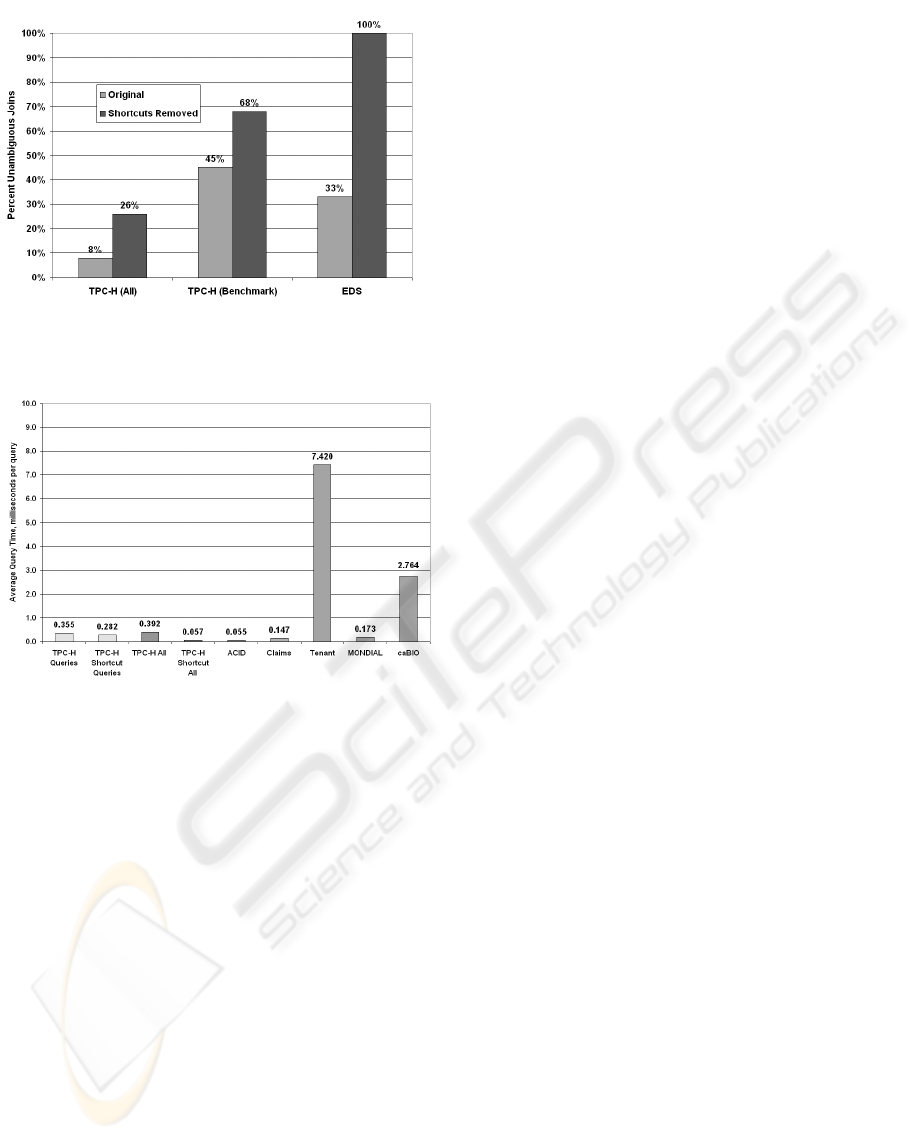
Figure 8: Reducing Ambiguity by Removing Shortcut Joins
Figure 9: Query Inference Time
cursive pruning, the average inference time decreased
from 126 ms to 2.7 ms on caBIO. The lossy join in
TPC-H query 5 is specified for this experiment. If it
was not specified, the time to compute all lossless and
one-lossy interpretations (using the strategy in Sec-
tion 5.2) was 16 ms (after removing shortcut joins).
Thus, the time to infer a query is minimal.
7 CONCLUSION
By combining the algorithms to address the chal-
lenges of query inference into a single inference en-
gine, AutoJoin provides a comprehensive tool for de-
veloping the next generation of query interfaces. In
addition, it provides a method to create SQL queries
without requiring full knowledge of the database.
Inference is possible on larger and more complex
schemas, due to the efficient maximal join tree algo-
rithm EMO. By precomputing these potential joins,
the majority of computation occurs only once, prior
to query time. Identification and removal of semanti-
cally equivalent shortcut joins reduces the number of
ambiguous queries further improving inference. Pre-
determined look up tables combined with indexing
of potential joins allows for efficient identification of
joins for each query. Numerous performance experi-
ments on diverse schemas demonstrate that the time
to infer these joins for each query is minimal. In
addition, the complexity of queries inferred exceeds
any previous individual inference method. AutoJoin
is a general inference engine configurable to specific
query interface requirements. This allows for the con-
tinued development of simpler keyword, conceptual,
and natural language query interfaces without the bur-
den of developing a scalable and efficient join de-
termination algorithm. Overall, query inference is
a practical query tool to incorporate into query lan-
guages and database systems.
REFERENCES
Agrawal, S., Chaudhuri, S., and Das, G. (2002). DBX-
plorer:A System for Keyword-Based Search Over Re-
lational Databases. In IEEE ICDE, pages 5–16.
Balmin, A., Hristidis, V., and Papakonstantinou, Y. (2004).
ObjectRank:Authority-Based Keyword Search in
Databases. In VLDB, pages 564–575.
Catarci, T. (2000). What happend when Database
Researchers met Usability. Information Systems,
25(3):177–212.
Gabow, H. and Myers, E. (1978). Finding All Spanning
Trees of Directed and Undirected Graphs. SIAM Jour-
nal of Computing, 7(3):280–287.
Hristidis, V. and Papakonstantinou, Y. (2002). DIS-
COVER:Keyword Search in Relational Datbases. In
VLDB, pages 670–681.
Maier, D. and Ullman, J. (1983). Maximal Objects and the
Semantics of Universal Relation Databases. TODS,
8(1):1–14.
Owei, V. and Navathe, S. (2001). Enriching the con-
ceptual basis for query formulation through relation-
ship semantics in databases. Information Systems,
26(6):445–475.
Popescu, A., Etzioni, O., and Kautz, H. (2003). Towards a
theory of natural language interfaces to databases. In
IUI.
Semmel, R. and Mayfield, J. (1997). Automated Query
Formulation using an Entity-Relationship Conceptual
Schema. Intelligent Information Systems, 8:267–290.
Wald, J. and Sorenson, P. (1984). Resolving the Query
Inference Problem Using Steiner Trees. TODS,
9(3):348–368.
Zhang, G., Meng, F., Kong, G., and Chu, W. (1999). Query
Formulation from High-level Concepts for Databases.
In User Interfaces to Data Intensive Systems.
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
38
