
A HIERARCHICAL DISTRIBUTED COMMUNICATION
ARCHITECTURE FOR REAL-TIME AUCTIONS
Ilhem Abdelhedi Abdelmoula, Hella Kaffel Ben Ayed, Farouk Kamoun
CRISTAL Lab, ENSI -National school of computer science, University of Manouba, Tunis, Tunisia
Keywords: real-time auctions, e-commerce, distributed architecture, IRC protocol, theory graph algorithms.
Abstract: This paper presents a new hierarchical distributed communication architecture, called AHS (Auction
Handling System), based on clusters. This architecture uses the IRC (Internet Relay Chat) channels and
protocol facilities in order to support real-time auction applications (RTA). Coordination between
distributed auction servers is needed to exchange and update some relevant auction information and to
resolve the winning bid within a cluster. The problem is how to determine the best location of the auction
server coordinator. For this purpose, we suggest the use of the Floyd-Warshall’s algorithm, which is a graph
theory algorithm.
1 INTRODUCTION
Actually, online auction sites are divided into two
categories: the non-real-time auctions (NRTA) and
the real-time auctions (RTA) (Liu and al., 2000).
The most popular online auction sites currently
available on the net are NRTA (Liu and al., 2000)
and (Bougouris and al., 2000), such as eBay,
Amazon, AuctionWatch. These auction sites remain
still different from the conventional face-to-face
auctions. Indeed, they have many limitations: they
suffer from sustainable hardly controlled
information delays; they have usually a long cycle
time which might be risky (Bougouris and al., 2000)
(e.g. an airline company may want to auction the
remaining seats of a flight a few hours prior the
departure); they allow the phenomenon of collusion
among bidders (they have enough time to cooperate
and reach agreements not to outbid each other)
which has the overall effect of lowering the wining
bids (Liu and al., 2000); and they do not allow real-
time bidding (Bougouris and al., 2000) (a bidder
cannot make quick response to market dynamics
even if some pseudo-autonomous bidding).
Besides the real-time features, there are also
distributed concerns that must be taken into
consideration. Indeed, the most well-known auction
web sites, such as eBay (Ezhilchelvan and
Morgan,2001), (Ezhilchelvan and al.,1999) and
(Ezhilchelvan and al.,2000), Amazon (Ezhilchelvan
and al.,2000), FishMarket (Esteva and Padget,
1999), AuctionBot (Wellman and Wurman, 1998a),
(Wellman and al., 1998b) and (Wellman and al.,
1999), Priceline, CNET and E*Trade (Ezhilchelvan
and Morgan,2001), which user domains are typically
large, geographically distributed, rely on only one
central auction server. These auction sites have
serious problems: they are restrictive and non
scalable (Ezhilchelvan and Morgan,2001),
(Ezhilchelvan and al.,1999) and (Ezhilchelvan and
al.,2000) (too many bidders could easily overload
the central auction server). This could result in
performance degradation and perhaps bottlenecks,
which would make the whole auction process
unresponsive and unavailable. Further, an
unreplicated central server would constitute a single
failure point (Ezhilchelvan and al.,1999). These
considerations make decentralisation in auction
system design not only a desirable option but also an
essential requirement.
In this paper, we consider the issues related to
communication services required to support real-
time auctions among distributed auction servers,
which were developed and presented in a previous
study (Kaabi, BenAyed and Kamoun, 2003) as a
distributed communication architecture, called AHS
(Auction Handling System). To support real-time
auction communications, we suggested using IRC
channel and protocols under the AHS architecture.
The communication protocol which supports
interactions between an auction server and many
5
Abdelhedi Abdelmoula I., Kaffel Ben Ayed H. and Kamoun F. (2005).
A HIERARCHICAL DISTRIBUTED COMMUNICATION ARCHITECTURE FOR REAL-TIME AUCTIONS.
In Proceedings of the Second International Conference on e-Business and Telecommunication Networks, pages 5-15
DOI: 10.5220/0001418200050015
Copyright
c
SciTePress
bidders is defined and implemented in a previous
work (Kaabi, BenAyed and Kamoun, 2003). Here,
we focus on the definition of the architecture of the
distributed auction server system (ASS), which
supports interactions between a set of distributed
auction servers that cooperate in conducting a real-
time auction.
This paper is divided as follows: Section 2
presents a definition of RTA and summarizes their
principal requirements in terms of communication
issues. Section 3 introduces the AHS architecture
and its functional elements and communication
protocols. Section 4 presents a possible architecture
of the distributed Auction Server System (ASS).
Section 5 describes the extended architecture of the
AHS based on clusters and presents a “potential
solution” for the designation of an ASA coordinator.
Section 6 discusses relevant related work. Finally,
section 7 provides some concluding remarks and
future work.
2 REAL-TIME AUCTIONS
2.1 Auction process
Traditionally, an auction process involves three
types of entities: the initiator (I), the bidders (B
i
) and
the auctioneer (A). It is decomposed into three
principal phases (Kaabi, BenAyed and Kamoun,
2003): the starting phase, the bidding phase and the
settlement phase.
The starting phase begins with the initial buyer
or seller registration (authentication, exchange of
cryptographic keys, etc.), the setting up of an auction
event by the initiator and the auctioneer (description
of the item being sold, setting up the rules of the
auction, the asking price, etc.) and the access of
bidders to an auction event.
In bidding phase, goods are sold in multiple
rounds, governed by a clock (namely, the limited
time interval to make a bid). During each round, the
auctioneer collects bids from the bidders and
validates them according to the auction rules. Once
the clearing time expires, it evaluates all validated
bids and broadcasts back to all the bidders the new
price quote (PQ). At the end of a round, the
auctioneer can either decide to close the auction or,
to initiate the new round auction by quoting a new
PQ.
The settlement phase corresponds to the auction
result notification at the end of the auction. At this
point in time, the auctioneer broadcasts a transaction
notification (TN) to all the bidders and to the
initiator informing them about the “winners” and the
final result.
Here, we describe the most familiar type of
auction process, a multi-round English auction.
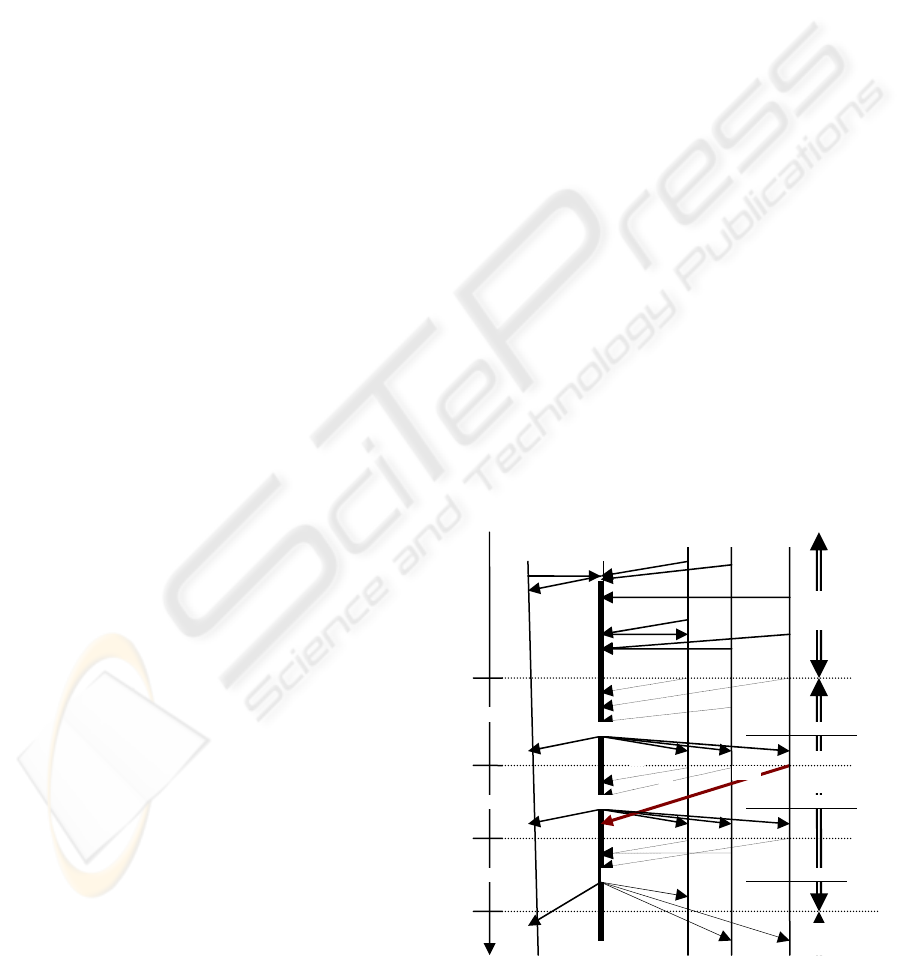
Figure 1 shows a message sequence chart for a
possible exchange of bids and price quotes messages
between the entities. In this type of auction, all the
bidders should have always the same view of the
items being sold by auction, and of the proposed
bids. Further, they should have the same
communication delays between them and the
auctioneer, and share the same notion of time
(Panzini and Shrivastava, 1999).
Suppose that if both bidder B
2
and B
10
see the PQ at
the same time and submit a bid, the bid from the
closer bidder (B
2
) may reach the evaluation process
several seconds earlier on the average. Figure 1
depicts a situation in which the remote bidder (B
10
)
submits its bid before the intermediated clearing
time but this bid is not delivered in time. This bid,
which may be higher than the others, will not be
evaluated by the auctioneer at the current round
auction and may cause a loss of extra profit for the
seller and a loss of ownership for the bidder. Hence,
this delay influences the auctioneer’s service quality
and leads to frustrated bidders who could leave the
auction site. Meeting the deadlines in an auction
activity is not just a quality issue but a correctness
issue (Peng and al., 1998). Our objective is then to
give to all the bidders a fair and equal access to all
of the exchanges.
Figure1
: An English auction process
b
10
b
2
T
I
M
E
b
1
Access
Bidding
phase
I
A
Settlement
p
hase
Starting
phase
Registrer
1st ROUND
2sd ROUND
3rd ROUND
Intermediate clearin
g
Intermediate clearin
g
Final clearin
g
timeTN
PQ1
PQ2
b
1
b
2
B
n
B
1
B
2
b
10
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
6
2.2 Characteristics of real-time
auctions
Real-time auctions form a class of online auctions
which have to be processed time-and-price critical.
They include the most common trading models used
in real-life auctions, such as English, Dutch, Sealed-
bid, CDA, and their variations (Vickrey, Yankee,
etc.). Generally, they are present in all industry
market places (see table 1) (Kaabi, BenAyed and
Kamoun, 2002), where goods have a constantly
varying price and or availability; and in stock market
places (Peng and al., 1998) and (Maxemchuk and
Shur, 2001), where data information from the
business environment must be continuously
monitored and processed in a timely manner to
allow for real-time decision over the Internet.
Table 1: Examples for real-time auctions in industry
market places
Kind of
business
Type of
auction
Sector
Description
Forward Agriculture
Any
sectors
Cattle or fish
auctions
Any raw
material market
places
B2B
Reverse Any
sectors
Tenders/pitches
by public
institutions
B2C
Forward Art Art and antique
auctions
For bidders, these auction sites enforce real-time
competitions among them and allow real-time
decisions. For sellers, they prevent the phenomenon
of collusion, as bidders do not have enough time to
cooperate and reach agreements between them (Liu
and al., 2000).
RTA share the following common
characteristics:
- They shall be running in real-time manner (Rumpe
and Wimmel, 2001). Bidders always have current
bidding information visible and receive them in real-
time fashion (Liu and al., 2000). This would reduce
as minimal as possible the delay of transmission of
bids, PQs or the TN between bidders and the
auctioneer. A resource reservation protocol such as
RSVP could be used to guarantee a bounded delay
(Rumpe and Wimmel, 2001).
- They are all time-triggered systems (Wellman and
Wurman, 1998a)and (Panzini and Shrivastava,
1999), having inherent timing constraints as well as
autonomous features on when or how the operations
and interactions that the participants (auctioneer,
bidders or initiator) might perform. To meet
deadlines, such systems must provide a predictable
response time in order to guarantee the correctness
of time-critical transactions (Peng and al., 1998).
- They occur in a short period of time which may
vary from a few minutes (15 min) to a maximum of
three hours (Rumpe and Wimmel, 2001). For
example, a lot may take about 6 seconds to be sold.
This means that the frequency of bids is relatively
high.
- The time duration may consist of a main non
extendable part and an extendable part (Rumpe and
Wimmel, 2001)and 0. Indeed, the auction time is
extended whenever a bid arrives shortly before the
auction end. This allows other bidders to react. The
provided reaction may vary, e.g. starting from 3
minutes as an initial extension down to a few
seconds at the very end (Rumpe and Wimmel,
2001).
2.3 Communication requirements
Several studies have identified multiple
requirements for real-time auctions. Given the fact
that potential participants are distributed globally
and each has a different computing capacity
(operating speed, network bandwidth, etc.), such
applications bring new challenges on
communication issues. In this section, we highlight
some basic requirements described as follows:
- Synchronous mode (Kaabi, BenAyed and
Kamoun, 2003): such as videoconferencing, chat,
etc. could enable real-time interactions between
sellers, bidders and the auctioneer, which results
in increasing the rapidity of decision-making
process.
- A multicast technology (Liu and al.,
2000) ,(Wellman and Wurman,
1998a), 0and (Maxemchuk and Shur, 2001):
enables one copy of digital information sent by
the auctioneer such as bid, PQ and TN to be
received by a group of bidders. Hence, it would
require identifying the group of participants and
broadcasting to them all bid messages. This
would significantly minimize the number of
messages sent regardless of the density and the
dynamic of group membership and would also
optimize the way the bandwidth is used. Still,
there is no guarantee that messages would be
received simultaneously and instantaneously by
all members, which may cause unfair
competitions. Therefore, a RTA requires using a
fair multicast communication protocol.
A HIERARCHICAL DISTRIBUTED COMMUNICATION ARCHITECTURE FOR REAL-TIME AUCTIONS
7

- Fairness (Peng and al., 1998), (Rumpe and
Wimmel, 2001) , (Kaabi, BenAyed and Kamoun,
2003) , (Ezhilchelvan and Morgan,
2001), (Banatre and al., 1986) and (Maxemchuk
and Shur, 2001): allows bidders to have the same
chance to place their bids, which should be taken
into account fairly by the auctioneer. However, a
bidder who is close to the central server may
have faster access than a remote one, leading to
unfair competitions among bidders.
- Timely delivery and processing (Peng and
al., 1998): the real time bidding process is
interactive: the auctioneer must efficiently and
timely process incoming bids and send the PQ to
all bidders. Each bidder has to make real-time
decisions to submit rapidly a higher bid. This
entails timing constraints for processing these
operations on both sides as well as real-time
communication between them. In the reality,
these messages can take arbitrary time to reach
their destinations and auctions have no control
over data transmission delays (Liu and al.,
2000) ,(Panzini and Shrivastava, 1999)and
(Kaabi, BenAyed and Kamoun, 2003).
Therefore, it would require guaranteeing the real-
time delivery and processing of messages
exchanged between bidders and the auctioneer.
- Time-message validity (Kaabi, BenAyed
and Kamoun, 2003) : usually a bid is considered
time related information where is valid until a
certain time and then becomes obsolete. As a
result, the concept of time-message validity
should be taken into consideration within the
communication protocol. This would allow a
waiting time while the bid is still valid.
- Clock synchronization (Wellman and
Wurman, 1998a) ,(Peng and al., 1998)and 0: In
RTA, the synchronization of client and server
times is essential. For example, the server does
not close the auction if a participant still believes
it is still open. Moreover, in a distributed
environment, clock synchronization is essential
for many real-time and fault-tolerant operations.
Hence, an appropriate protocol must ensure the
temporal flexibility issue, so that bidders’ clock
must be synchronized to auction server’s clock
as well as among auction servers clocks.
- Scalability (Panzini and Shrivastava,
1999), (Ezhilchelvan and Morgan,
2001) ,(Ezhilchelvan and al.,1999), (Ezhilchelvan
and al.,2000) and (Banatre and al., 1986): an
auction system must be extensible and capable of
supporting an increasing number of users (easy
insertion and removal of bidders and/or sellers),
specifically in the last minutes. For example,
more than two-thirds of eBay auctions had bids
submitted less than an hour before the scheduled
end time (about ten minutes) (Ockenfels and
Roth, 2002a)and (Ockenfels and Roth, 2002b). It
must also be able to provide end-users with
satisfactory Quality of Service (QoS), regardless
of their increasing number and their geographical
distance.
- Reliability (Banatre and al., 1986)and
(Maxemchuk and Shur, 2001): a reliable
auctioning protocol should have a bounded and
predictable responsive time. It must deliver the
same message reliably and simultaneously to all
receivers anywhere in the net. When a failure
occurs, bidders and sellers must be able to
continue their participation in the sales; the
transaction time may be lengthened.
- Availability (Panzini and Shrivastava,
1999): The auction service must be
“available”(operate consistently and correctly)
under specified load and failure hypothesis. In a
distributed system context, high availability is
essential; otherwise, the system is doomed to
continuously leak users to other similar systems
with better availability.
All these requirements are highly correlated, but
there are further features that are not described in
this section which relate to issues such as security,
load balancing, concurrency, anonymity, privacy,
etc. Such requirements are considered important in
some specific RTA applications.
3 THE AHS ARCHITECTURE
OVERVIEW
The AHS (Auction Handling System) is a distributed
communication architecture providing real-time
auction applications with specific communication
services, independently of the auction rules.
3.1 Functional components
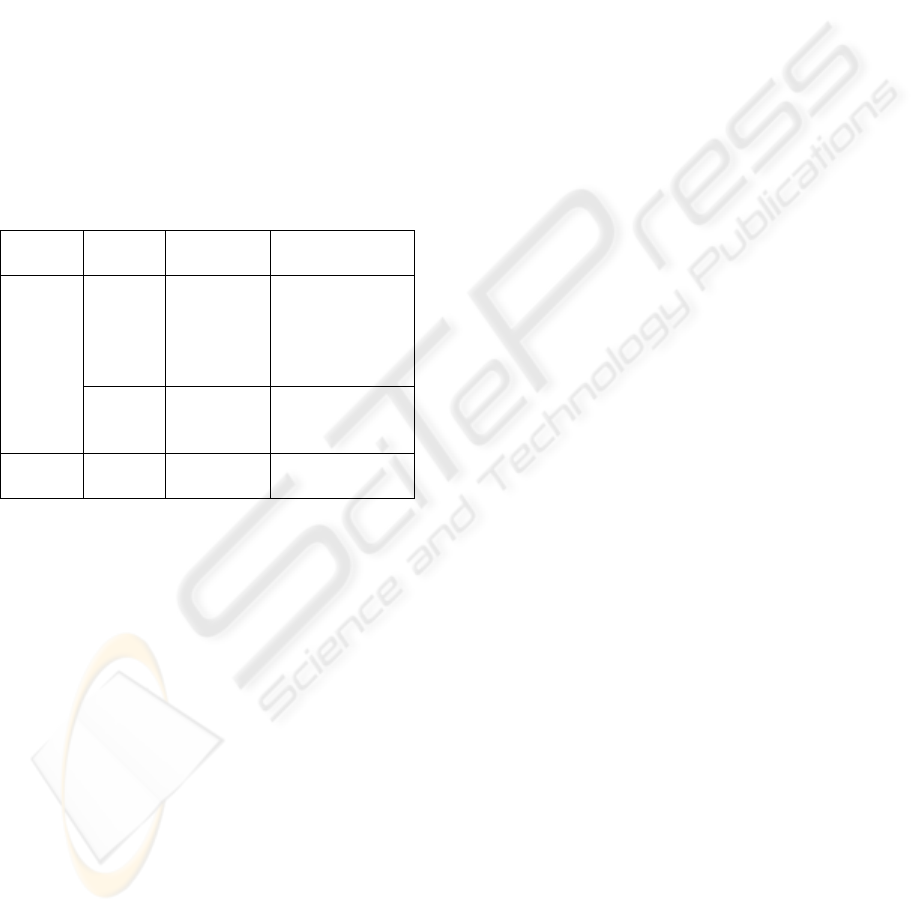
As shown in figure 2, the AHS architecture is
composed of three functional elements: the BSA
(Buyer/Seller Agent), the ASS (Auction Server
System) and the BS (Bids Store) 0.
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
8
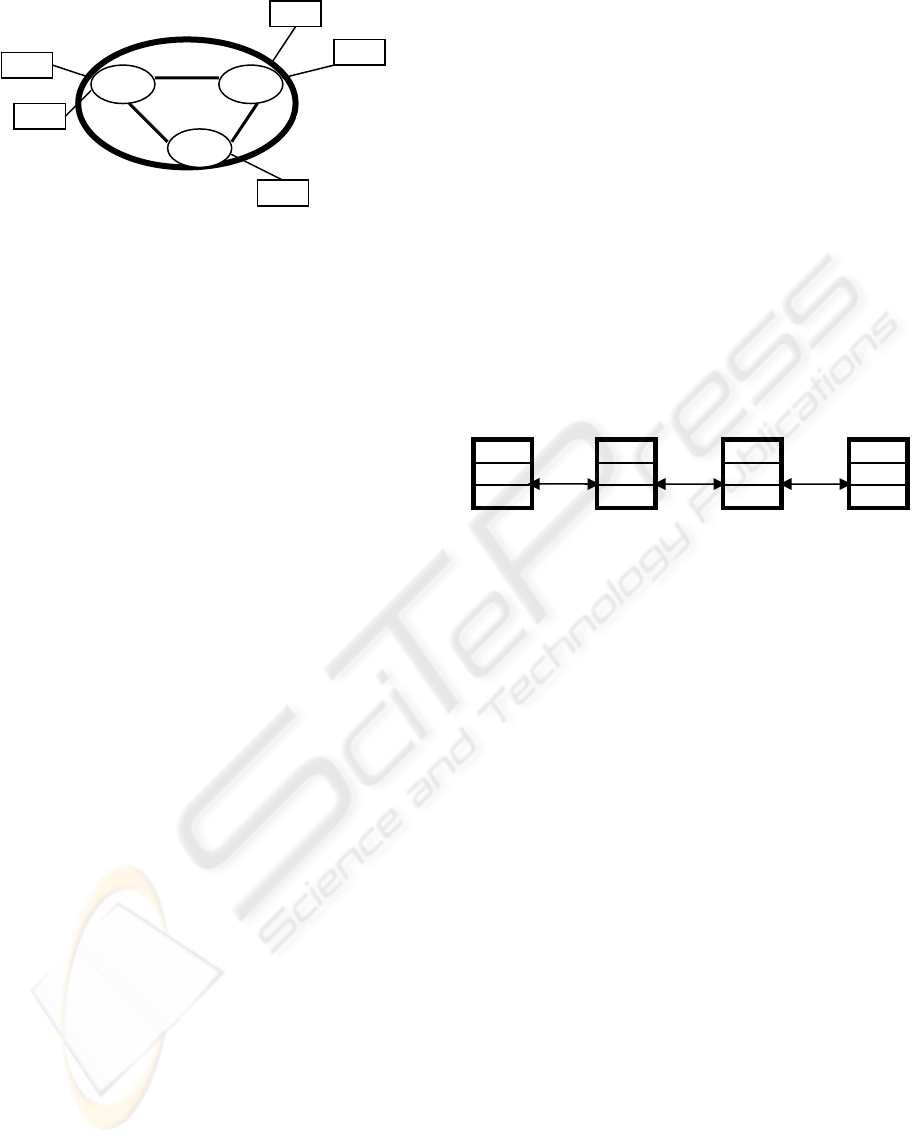
Figure 2: The AHS architecture
- The BSA is a user agent that can be associated
with a Seller or a Buyer. It helps a Seller to set up an
auction event and possibly to participate in the
bidding process. Or it helps the bidder to participate
in an auction event and submit bids. A BSA is
connected to one ASA (Auction Server Agent),
generally the closest one. However, several BSA
may be connected to the same ASA.
- The ASS is composed by a set of distributed ASA
involved in one or more auction events
simultaneously. Each ASA is associated to an
auction server that holds the auctioneer’s activities.
Cooperation between ASA is needed for the
resolution of the wining bid.
- The BS provides, when required, the capacity of
storing bids, PQs or TNs for further use (message
tracking requirement). The physical location of the
BS is not already specified: it can be situated within
an ASA or a BSA or constitutes a separate entity.
3.2 The IRC protocols
A previous study [18] has compared some Internet
application protocols like HTTP, IRC, E-mail and
NNTP according to basic negotiation requirements
in terms of communication services. It showed that
the IRC protocol is best suited for real-time auctions.
Further, IRC presents many advantages with regard
to real-time auctions:
- It is based on a distributed architecture that
defines two functional components: IRC-Server and
IRC-Client (IETF, 2000a).
- It provides real-time text based conferencing
between IRC clients (IETF, 2000a). This may reduce
considerably the end-to-end transmission delay
between the auctioneer and the bidders.
- Communications are running in a synchronous
mode with a push mechanism (IETF, 2000b).
- IRC channels support multicast group
communication (IETF, 2000c).
- It provides a fair distribution of messages to all
IRC Clients since IRC servers set for them the same
response time (2 seconds) so they are all served
fairly (IETF, 2000b).
- An IRC network configuration is a spanning
tree defined by a group of servers connected to each
other. This logic tree-based structure allows
scalability (IETF, 2000a).
- It can be used to reduce data transmission
delays between auction application layer and the
traffic on the Internet (Kaabi, BenAyed and
Kamoun, 2002).
3.3 AHS communication protocols
The AHS architecture is structured in three layers
(Kaabi, BenAyed and Kamoun, 2003) from top to
bottom, as shown in figure 3: the auction application
layer, the P-auction layer and the IRC layer.
Figure3: The AHS layered model
The P-auction layer provides the auction
application with the required communication
services. It uses the appropriate services provided by
the IRC layer.
As shown in figure 3, three communication
protocols are required to implement AHS
architecture: the BSA-protocol, the BS-protocol and
the ASA-protocol.
- The BSA-protocol specifies the allowed
interactions between a BSA and an ASA involved in
an auction event. This protocol is already specified,
implemented and validated in (Kaabi, BenAyed and
Kamoun, 2003)and (Kaabi, BenAyed and Kamoun,
2004). It is encapsulated within the IRC-Client
protocol.
- The ASA-protocol specifies the interactions
between a set of ASA involved in an auction event
within the ASS. It will be encapsulated within the
IRC-Server protocol.
- The BS-protocol specifies the request-response
interactions between a BS and a BSA. They concern
the storage and the retrieval of bids to/ from the BS
which induce end-to end exchange of messages
through one or many ASA. This protocol will use
the point-to-point communication mode provided by
the IRC protocol.
-
ASA BSA
ASA
Protocol
BSA
Protocol
IRC
P.auct
A
pp
.
BSA
Protocol
ASA
BS
BSA
BSA
BSA
BSA
BS
ASA ASA
ASA
A
SS
IRC
P.auct
A
pp
.
IRC
P.auct
A
pp
.
IRC
P.auct
A
pp
.
A HIERARCHICAL DISTRIBUTED COMMUNICATION ARCHITECTURE FOR REAL-TIME AUCTIONS
9
4 THE ASS ARCHITECTURE
In a previous study (Kaabi, BenAyed and Kamoun,
2003), we suggested implementing the AHS over the
IRC architecture, which is a spanning tree (IETF,
2000a)and (IETF, 2000b). Every auction event will
use an IRC-Channel, a BSA/ BS will be
implemented over an IRC-Client and an ASA will
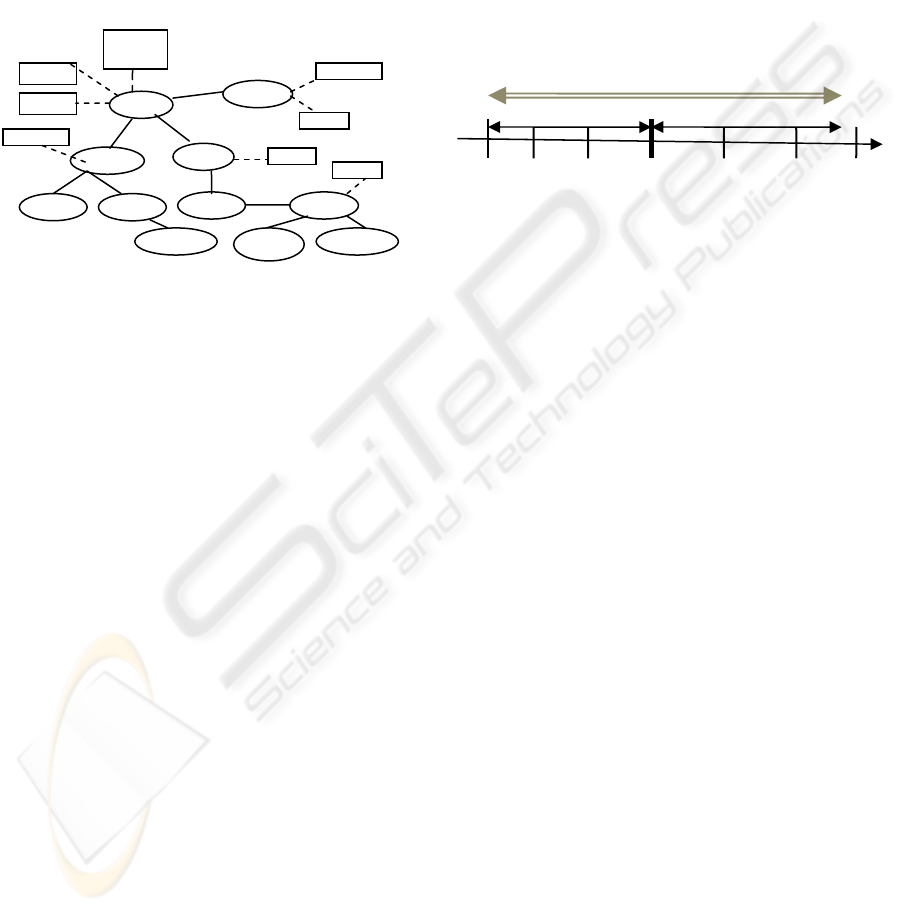
be implemented over an IRC-Server. Figure 4
depicts the logic structure of the AHS architecture:
Figure 4: The AHS logic structure
For example, in figure 4, we suppose that the
ASS is composed by 11 ASAs, supporting the
auctioneer’s activities and are simultaneously
involved in many auction events.
To access an active auction, a BSA must connect
to an ASA participant, if possible, the nearest one, in
order to reduce the data transmission delay. During
the bidding phase, every ASA (e.g. ASA
1
) must
serve and provide its local BSAs (e.g. BSA
1
, BSA
2
)
with the current auction information in which they
are participating. At the end of each round, all ASAs
must cooperate and exchange relevant information
(e.g. bids, PQs) in order to evaluate the wining bid
and calculate the newest PQ.
From the bidder’s side, the ASS represents a
“black box” where the auction process is opaque to
all BSA participants. However, inside the ASS, the
control of the auctioning process is disseminated
among a set of distributed ASAs, which will
cooperate in order to determine together the result of
the auction. From this point, we assume that the
evaluation process is distributed between all ASAs
being part of the ASS. The problem addressed here
is how and when will the ASA participants
cooperate to resolve the winning bid and calculate
the newest PQ for a given auction event? Three
approaches are possible: the centralized approach,
the totally distributed approach and the hierarchical
approach.
4.1 The Centralized Approach
The centralized approach is to consider a centralized
auction server node, called “an ASA
evaluator”(ASA
e
). Thus, every ASA collects
validated bids from their respective local BSAs and
forwards them to ASA
e
. When the clearing time
expires, the application within the ASA
e
runs the
evaluation process to determine the wining bid
according to the auction rules, and then multicasts
back the new PQ to all ASA participants. Figure 5
illustrates the essence of this approach:
Figure 5: A Centralized approach
The advantage of this approach is the simplicity
of keeping track of the auction state. Only the ASA
e
will know the global auction state and the identity of
the winner’s BSA. The other ASAs would not have
to be involved within the evaluation process.
The drawback is that all communications must
go through the central node (ASA
e
), roughly 2N
messages are exchanged per round and per auction
event (N is the number of ASA participating to an
auction event). Hence, the complexity is about θ(N).
When the number of participants (BSA) and the
number of auctions grow, the ASA
e
would constitute
a single point of failure and may become a
bottleneck. This could lead to unfairness,
unresponsiveness and unavailability of the auction
system. Consequently, the ASS will be less scalable:
suited only to small scale auction systems.
For this reason, the best approach would be to
remove the central node and distribute auction
services among all ASA. Two approaches are then
possible: a totally distributed approach and a
hierarchical approach.
4.2 The Totally Distributed
Approach
In opposition to the above approach, no central ASA
evaluator (ASA
e
) exists. The evaluation process is
decentralized and controlled by all the ASA
participants. Thus, every ASA will act as an ASA
e
,
having a replication of all auction services. This
Time
Collection
of local
bids from
BSAi
Validated
bids sent
b
y ASAi to
ASAe
Evaluation
only on ASAe
ASAe
multicasts
PQ to
ASAi
ASAi
broadcast
s PQ to
BSAi
START END
One Round
Phase 1 Phase 2
ASA 8
ASA
BSA
Initiator
ASA 3
ASA 7
ASA 2
ASA 4
ASA 5 ASA 6
ASA 9 ASA 11
ASA 10
BSA5
BSA
BSA1
BSA3
BSA 12
BSA2
BSA 4
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
10
would remove the reliance on the central node.
Figure 6 shows the phases of an auction round in a
totally distributed approach for each ASA involved
in an auction event:
Figure 6: Totally distributed approach
Hence, there are two clearing times per round
corresponding to two evaluation processes on every
ASA, as shown in figure 6. At the first clearing time,
every ASA must validate its incoming bids, evaluate
the wining bid and forward his Intermediate Price
Quote PQ
i
to all adjacent ASAs. At the second
clearing time, every ASA have to evaluate all the
incoming PQ
i
and calculate the Final Price Quote
PQ
f
.
In this approach, the global auction state is
known by all the ASAs being part of the ASS.
Consequently, it would generate a huge amount of
traffic on the Internet, approximately 2 N (N-1)
messages exchanged per round and per auction
event. Hence, the complexity is about θ(N²). This
would also raise the problem of data replication and
may require a high synchronization between the
ASAs because the PQ
f
has to be unique and identical
on every ASA at the end of the round.
However, this approach could easily achieve the
scalability, the fairness and the availability as the
total load is shared among a set of distributed ASA
rather then being concentrated on a single central
ASA.
Therefore, we suggest an intermediate solution to
reduce the number of unnecessarily sent messages
and enhance system performance: the hierarchical
approach
.
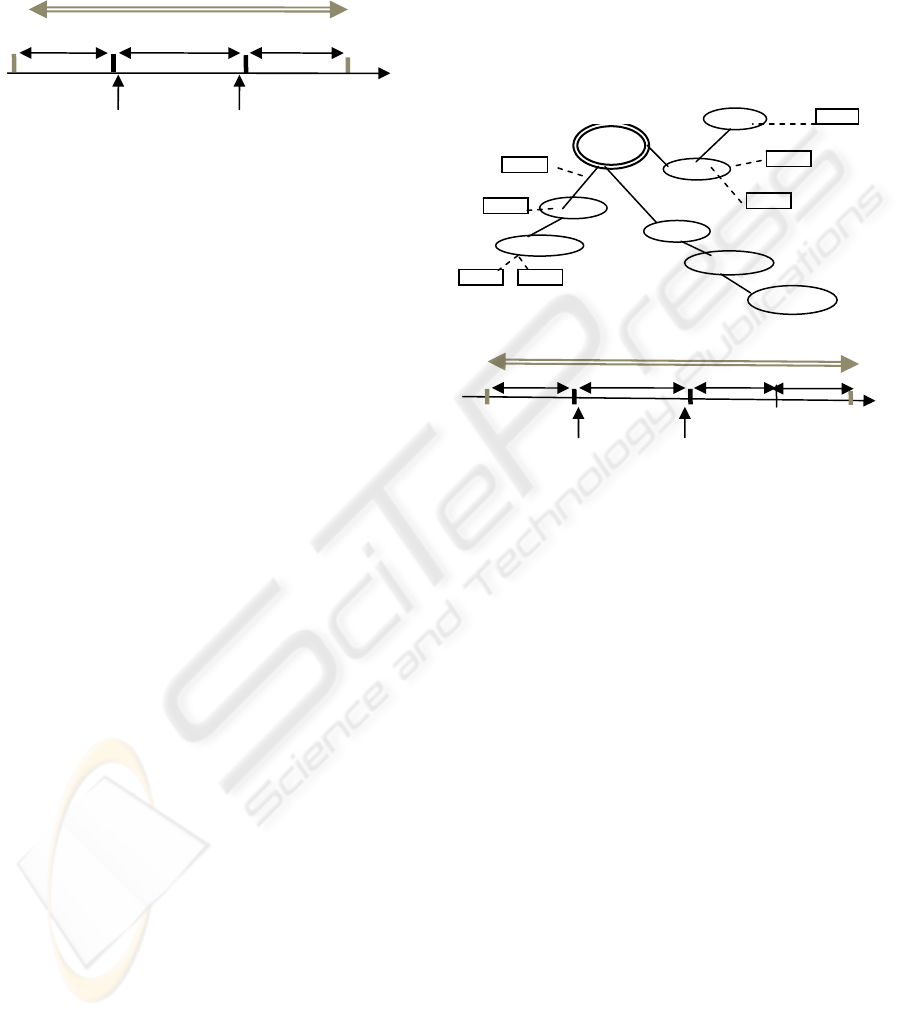
4.3 The Hierarchical Approach
In the hierarchical approach, we assume that we
have two types of ASA being part of the ASS:
- The ASA participants, who collect validated
bids from their local BSAs, evaluate them, calculate
their local PQ
i
and then forward it to the ASA
coordinator (ASA
c
).
- The “ASA coordinator” (ASA
c
), who collects
all the incoming PQ
i
, evaluates them and multicasts
the PQ
f
back to all ASA participants.
For example, suppose that the ASS is composed
by 8 ASAs as shown in figure 7, and the ASA
c
is
represented by ASA
1
. The latter will receive
respectively all the PQ
i
from all the ASA
participants (ASA
2
, ASA
3
,.., ASA
8
) before the
clearing time. Then, it will calculate the PQ
f
and
multicast it back to them. As soon as the ASAs will
receive the PQ
f
, they will broadcast it respectively to
their local BSAs. The phases of this approach are
described in details in figure 7 below:
Figure 7: A Hierarchical approach
Similar to the second approach, there are two
clearing times per round: the first one is on each
ASA, and the second occurs only on the ASA
c
. Here
again, the global auction state is known by all the
ASA, yet it generates less traffic then that produced
in the totally distributed approach; nearly 2 (N-1)
messages exchanged per round. The complexity is
about θ(N). Moreover, since the auction services are
replicated on all ASA, the problem of data
replication is also addressed here and requires a high
synchronization between the ASA participants and
the ASA coordinator.
Compared to the first and second approaches, the
hierarchical approach achieves better fairness as the
distance between a BSA and the ASS is minimized.
Therefore, we choose to apply this approach for the
ASS architecture.
5 A HIERARCHICAL
CLUSTERED ARCHITECTURE
When the number of bidders grows wider
geographically and the size of the ASS raises, the
number of ASA sending the PQ
i
to the ASA
c
may
Collection
of local
bids from
BSAi
1
st
Evaluation
on ASAi
Sending
of PQ
i
to
ASAc
One Round
2
sd
Evaluation
on ASAc
Phase 1 Phase 2 Phase 4
ASAc
multicasts
PQ
f
to all
ASAe
Phase 3
END
Time
b
roadcast
of PQ
f
to
local
BSAi
START
Collection
of local
bids from
BSAi
1
st
Evaluation
Multicast
of PQ
i
to
ASAi
One Round
2
sd
Evaluation
Phase 1 Phase 2
Multicast
of PQ
f
to
local
BSAi
Phase 3
END
Time
START
BSA
BSA
BSA
BSA
2
BSA
BSA
BSA
ASA1
ASA 3
ASA 2
ASA 4
ASA 5
ASA 8
ASA 7
ASA 6
ASA Coordinator
A HIERARCHICAL DISTRIBUTED COMMUNICATION ARCHITECTURE FOR REAL-TIME AUCTIONS
11

become important. Hence, we could fall in the
situation of centralized approach as the ASA
c
would
constitute the failure point of the ASS. Therefore,
we suggest an extended hierarchical architecture for
the ASS based on clusters where the ASAs are
structured hierarchically in several clusters, as
shown in figure 8.
Figure 8: Hierarchical architecture based on clusters
So that, when the size of ASS becomes
important, it will be divided into many clusters,
where each cluster spans a limited network area
gathering a set of ASAs and one ASA
c
. The global
auction system would be constituted by a set of
clusters, shown as circles in figure 8, interconnecting
through their respective ASA
c
(ASA
1
, ASA
2
and
ASA
5
).
To the outside world, each cluster appears to be a
single system and thus the ASA-ASA
communications will be reduced. Indeed, each
cluster, through its local ASAs, will provide its end-
users with the auction services, which are in its
geographical zone. The rules fixing the number and
the size of clusters will be studied further.
One of the main ideas of cluster computing is to
offer load-balancing, high availability and
scalability. We suppose that this extended
architecture would facilitate the coordination
between all the ASAs being part of the ASS.
However, it would require an inter-communication
ASA-protocol between clusters and an intra-
communication ASA-protocol within each cluster.
The specification of these protocols is under study as
well as the experimentation and the simulation of the
three approaches.
Furthermore, we need to designate one ASA as a
coordinator within a given cluster. The problem is
then how to determine the best location of the “ASA
coordinator”?
5.1 How to designate the ASA
coordinator?
To designate the ASA coordinator- ASAc, two
approaches are possible: The first consists in
dedicating an arbitrary ASA as a coordinator; the
second is to assign an ASA as a coordinator. The
first approach is rejected for many reasons: the
location of the ASAc changes dynamically
according to the number of bidders and the number
of auction events which are drastically increasing.
Consequently, a dedicated ASA will certainly face
request congestion and may become a bottleneck.
That’s why we opt for the second approach. In
this case, we assign dynamically an ASA as
coordinator among all the ASAs being part of the
ASS and within a given cluster. The problem
switches to how to determine the best location of the
ASA coordinator?
5.2 All-pairs shortest-path problem
Based on the IRC architecture, the ASS is a
spanning tree. Hence, it can be viewed as a weighed
connected undirected acyclic graph, noted by G =
(V,E) where V(G) is the set of nodes (ASAs) and
E(G) is the set of arcs (communication links
between ASA).
We denote by (u,v), the arc that connects two
ASAs, u and v of V and we define the weighed
function W : V →IR which associates a weight to
each arc (u,v). We assume that each link joining two
ASA is weighted by the value of the round trip
time/2.
The minimum number of communication links
required to connect all the ASAs is |V|-1. Further,
the path of a message being delivered is the shortest
path between any two ASA on the spanning
tree (IETF, 2000b).
To find the best location of the ASA coordinator,
we consider one assumption described as follows:
within the ASS spanning tree, the ASA coordinator
(ASA
c
) must be the nearest node to all the other
nodes (ASAs). In other words, the ASA
c
must
always have the shortest round trip time with all
other ASA in the ASS. This means that we should
resolve a problem of all-pairs shortest-path.
In a dynamic programming domain, a variety of
algorithms can be applied to resolve the all-pairs
shortest path problem, such as Dijkstra's single-
source shortest-path algorithm, Floyd-Warshall All-
Pairs-Shortest-Path algorithm, Bellman-Ford
algorithm, a Slow-All-Pairs-Shortest-Path algorithm,
etc. For our purpose, we choose to use Floyd-
Warshall’s algorithm for several reasons (Corman
and al.,1994). Compared to other algorithms (Faure
and al.,2002), it uses an adjacency matrix
representation and has the best run time, roughly
θ(V
3
), which can be reduced down to θ(V²).
BSA 1
BSA 4
BSA 3
BSA 2
BSA 5
BSA 6 BSA 7
ASA 1
ASA 3
ASA
ASA 2
ASA 4
ASA 5
ASA
ASA 8
ASA 9
ASA 10
ASA 12
ASA 11
Cluster 2
Cluster 3
Cluster 1
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
12
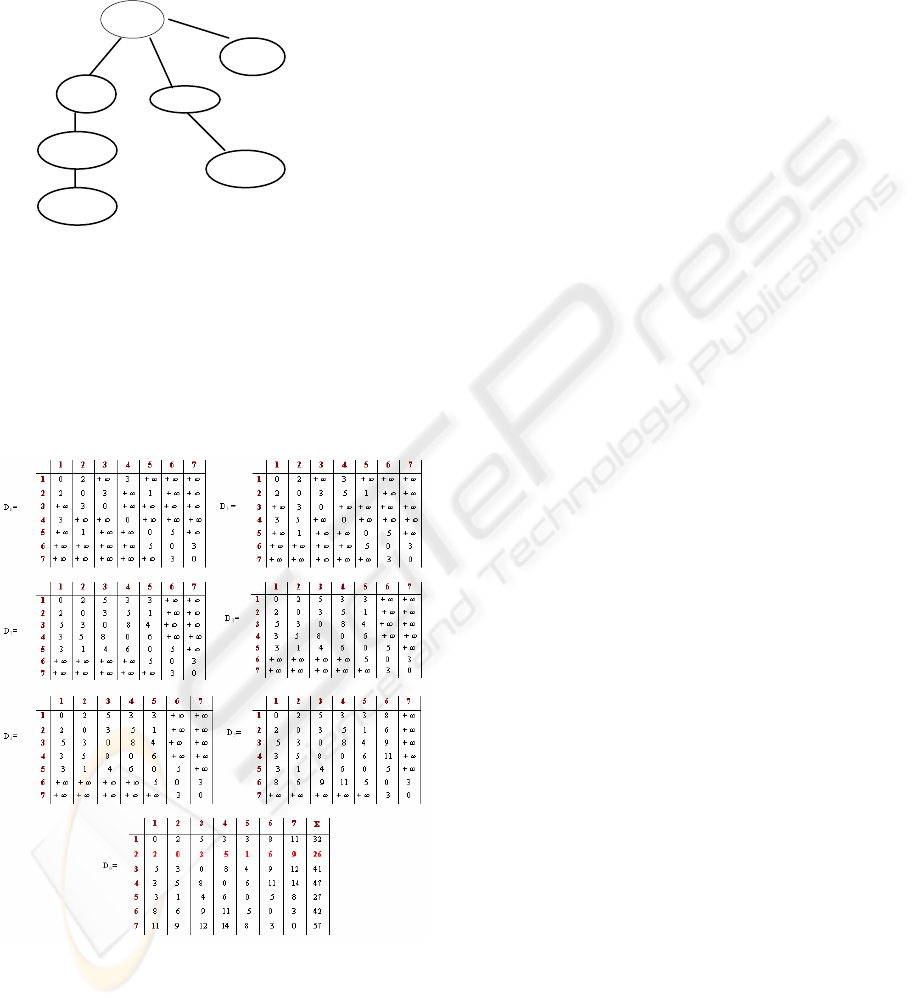
Assume that we have an ASS composed of 7
ASA involved in a RTA, forming a spanning tree as
a logical structure, as shown in figure 9 below. The
nodes of the ASS graph are V = {ASA
1
, ASA
2
,
ASA
3
, ASA
4
.,ASA
5
,ASA
6
ASA
7
}.
Figure 9: The ASS graph
G is represented by the D
0
’s adjacency matrix an
7x7 adjacency matrix with the weights of the arcs, as
shown in figure 10.
To determine the best location of the ASA
c
, we
apply the F-W algorithm to the ASS graph and we
assume that each link joining two nodes (ASAs) is
weighed by the value of the round trip time/2. The
demonstration of this algorithm is illustrated below
by the figure 10.
Figure 10: Demonstration of F-W’s algorithm
This algorithm permits to determine the optimal
node, which is the nearest to all other ASAs and has
the less weight with all nodes. For our case, the node
ASA
2
is then the optimal node so that it would be
designate as the ASA coordinator within this ASS.
6 RELATED WORK
Several studies deal with distributed system
architectures for online auctions. In the following,
we present two surveys that we think are most
closely related to AHS.
In (Panzini and Shrivastava, 1999), Panzieri and
Shivastra present a replicated auction service
architecture, duplicating the auction services across
a number of distributed auction servers. They define
two communication protocols required for the
implementation of their architecture, namely
Browser-to-Server Protocol (BSP) and Server-to-
Server Protocol (SSP). The former specify the
allowed interactions between bidders and an auction
server and the latter manages the information
exchange among auction servers. The
implementation of these protocols is not presented in
this paper; however several approaches of
implementing them are suggested. For the SSP, they
propose a transactional approach or a group
approach. They also show how they can achieve the
goals of data integrity, responsiveness and
scalability, but they do not discuss the fairness issue.
In (Ezhilchelvan and Morgan, 2001),
Ezhilchelvan and Morgan present a hierarchical
auction architecture for conducting auctions over a
set of distributed auction servers meeting the
requirements of scalability, responsiveness and
service integrity. Auction servers are hierarchically
structured into a number of interconnected local
market servers. This minimizes inter-server
communications and maintains fairness. Moreover,
auction servers are logically structured into a tree,
rooted on a single server in order to ensure the inter-
server communication scalable and the termination
detection efficient. They are partitioned into
multicast groups in order to facilitate dissemination
of shared data. Cooperation between auction servers
is needed to ensure data integrity. To achieve some
reliability issues, the authors propose a framework
for a fault-tolerant implementation of this
architecture by using replication and group
management techniques.
In both studies, the authors define similar
requirements for distributed auction architectures
and address the issues related to online auctions in
general without considering the real-time features.
However, we focus on distributed real-time auction
systems. Moreover, these architectures use the
HTTP protocol, which is considered as a poor
protocol for real-time auctions as discussed in
(Kaabi, BenAyed and Kamoun, 2003)and (Kaabi,
BenAyed and Kamoun, 2004). Furthermore, they
5
3
3
1 2 3
ASA2
ASA
5
ASA3
ASA 1
ASA 7
ASA 4
ASA 6
A HIERARCHICAL DISTRIBUTED COMMUNICATION ARCHITECTURE FOR REAL-TIME AUCTIONS
13

support some specific types of auctions such as
sealed-bid auction, open-cry auction and Dutch
auction while the AHS architecture is generic and
handles varieties of real-time auction protocols.
7 CONCLUSION AND OPEN
PROBLEMS
In this paper, we have presented a distributed
communication architecture, called AHS (Auction
Handling System) for real-time auctions. This
architecture is intended to be deployed in a large
scale network and to support real-time interactions
between bidders and a set of distributed auctioneers.
To reach our goals, we chose the use of the IRC
channels and protocol facilities in order to reduce
the data transmission delay and the traffic on the
Internet. Furthermore, we adopted a hierarchical
approach based on clusters because it is supposed to
offer scalability, load-balancing, client fairness, high
availability and reliability. This approach would
facilitate the collaboration between all the ASAs
being part of the ASS. Indeed, within a cluster, one
of the ASAs is designated as a coordinator, who
receives PQ
i
from ASAs for evaluation and
multicasts the PQ
f
. To determine the best location of
the ASA coordinator, we suggest using Floyd-
Warshall’s algorithm, a graph theory algorithm in
order to resolve an all-pairs shortest-path problem.
There are a variety of questions left unanswered
by the work described here. Below, we list few
directions for further work in this area. Work is
under way on the specification and the
implementation of the ASA communication
protocol. The interactions between different types of
ASA involved in a distributed real-time auction will
be clarified. The experimentation and the simulation
of the three approaches are under study.
The future direction of this study will include
time synchronization issue, the identification of load
parameters for the creation of clusters and the
implementation of the hierarchical approach.
REFERENCES
Liu, H., Wang, S. and Teng, F., 2000. Real-Time Multi-
Auctions and the Agent Support. Journal of Electronic
Commerce Research, VOL. 1, NO. 4, 2000.
Bougouris, C., Koukopoulos D. and Kallas, D.,1998. A
real-time auction system over WWW, from Internet at:
http://diogenis.ceid.upatras.gr/~koukopou/cnds.ps.,
visited in July 2004.
Wellman, M.P and Wurman, P.R.,1998a. Real time issues
for internet auctions. The 1st IEEE workshop on
dependable and real-time e-commerce systems
(DARE-98), Denver, CO, USA, June 1998.
Peng, C.S., Pulido, J.M., Lin, K.J. and Blough, D.M.,1998.
The design of an internet-based Real-Time auction
system. First IEE workshop on dependable and real-
time e-commerce systems (DARE-98), Denver, CO,
USA, June 1998, pp.70-78.
Rumpe, B. and Wimmel, G.,2001. A Framework for Real-
time Online Auctions, available at :
http://www4.in.tum.de/~rumpe/papers/RW01/RW01.p
df, visited in Marsh 2004.
Panzini, F. and Shrivastava, S.K.,1999. On the provision
of replicated internet auction services. Proceeding of
the 18th IEEE international symposium on reliable
distributed systems, Lausanne, October 1999, pp 390-
395.
Kaabi,S.,BenAyed,H. and Kamoun, F.,2003. Specification
of a communication protocol, based on IRC for real
time auctions. Sixth international Conference on
Electronic Commerce Research ICECR6, Dallas
Texas, pp 129-138.
Ezhilchelvan,P. and Morgan,G., 2001. A dependable
distributed auction system: architecture and an
implementation framework. Proceeding of the 5th
IEEE international symposium on Autonomous de-
centralized systems, Dallas, Texas, April 2001.
Ezhilchelvan,P., Morgan,G., Khayambashi,M.R. and
Palmer,D., 1999. Measuring the cost of scalability for
Internet-based server-centred applications, issued from
Internet.
Ezhilchelvan, P., Shrivastava, S.K. and Little, M.C.,2000.
A model and architecture for conducting hierarchically
structured auctions. May 2000. Available at
www.cs.ncl.ac.uk/people/paul.ezhilchelvan/home.for
mal/published/hierarchicFP.ps
Esteva,M. and Padget, J.,1999. Auctions without
auctioneers: distributed auction protocols, available at
http://www.maths.bath.ac.uk/~jap/Papers/amec99.ps,
visited in July 2004.
Wellman, M.P, Wurman, P.R. and Walsh, W.E.,1998b.
The Michigan Internet AuctionBot: A configurable
auction server for human and software agents. The 2nd
ACM International conference on autonomous agents,
pp.301-308.
Wellman, M.P, Wurman, P.R., Walsh, W.E.,and
O’Malley, K.A.,1999. Control architecture for a
flexible internet auction server.
Banatre,J.P.,Banatre,M.,LapalmeG., and Ployette, F.,1986.
The design and building of Enchere, a distributed
electronic marketing system. CACM Vol.29(1), 1986,
pp19-29.
Maxemchuk, N.F. and Shur, D.H., 2001. An Internet
Multicast system for the stock market. ACM
Transactions on computer systems, Vol 19 N°3.
Kaabi,S.,BenAyed,H. and Kamoun, F.,2002. Evaluation of
HTTP, E-mail, NNTP with regard to negotiation
requirements in the context of electronic commerce,
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
14

ICECR4-06, the fourth international conference of
electronic commerce research, Dallas, Texas.
Ockenfels, A.and Roth, A., 2002a. The timing of bids in
internet auctions: market design, bidder behavior and
artificial agents. Artificial intelligence magazine, July
2002.
Ockenfels, A.and Roth, A., 2002b. Last minute bidding
and the rules for ending second price auctions:
evidence from eBay and Amazon auctions on the
Internet. American Economic Review, September
2002, 92(4), 1093-1103.
IETF,2000a. Internet Relay Chat: Architecture,
www.ietf.org, RFC 2810.
IETF,2000b. Internet Relay Chat: Server Protocol,
www.ietf.org, RFC 2813.
IETF, 2000c. Internet Relay Chat: Channel Management,
www.ietf.org, RFC 2811.
Corman, T.H., Leiserson, C.E., and Rivest, R.L.,
'Introduction to Algorithms', section 26.2, p. 558-562.
1st edition Dunod, 1994.
Faure, R., Lemaire B. and Picouleau,C.,2002. Précis de
recherche opérationnelle, 5th edition Dunod 2002.
Kaabi,S.,BenAyed,H. and Kamoun, F.,2004. A Prototype
of a communication protocol for Real-Time Auctions.
Seventh international Conference on Electronic
Commerce Research ICECR7, Dallas Texas.
A HIERARCHICAL DISTRIBUTED COMMUNICATION ARCHITECTURE FOR REAL-TIME AUCTIONS
15
