
SERVICE ORIENTED GRID RESOURCE MODELING AND
MANAGEMENT
Youcef Derbal
School of Information Technology Management, Ryerson University, 350 Victoria Street, Toronto, ON, M5B 2K3, Canada
Keywords: Grid Resource Model, Computational Grids, Service Oriented Resource Model.
Abstract: Computational grids (CGs) are large scale networks of geographically distributed aggregates of resource
clusters that may be contributed by distinct providers. The exploitation of these resources is enabled by a
collection of decision-making processes; including resource management and discovery, resource state
dissemination, and job scheduling. Traditionally, these mechanisms rely on a physical view of the grid
resource model. This entails the need for complex multi-dimensional search strategies and a considerable
level of resource state information exchange between the grid management domains. Consequently, it has
been difficult to achieve the desirable performance properties of speed, robustness and scalability required
for the management of CGs. In this paper we argue that with the adoption of the Service Oriented
Architecture (SOA), a logical service-oriented view of the resource model provides the necessary level of
abstraction to express the grid capacity to handle the load of hosted services. In this respect, we propose a
Service Oriented Model (SOM) that relies on the quantification of the aggregated resource behaviour using a
defined service capacity unit that we call servslot. The paper details the development of SOM and highlights
the pertinent issues that arise from this new approach. A preliminary exploration of SOM integration as part
of a nominal grid architectural framework is provided along with directions for future works.
1 INTRODUCTION
Computational grids are large scale networks of
geographically distributed aggregates of resource
clusters that may be contributed by distinct
providers. These providers may enter into
agreements for the purpose of sharing the
exploitation of these resources. They may also agree
to organize their resources along an economy model
to provide commercially viable business services. A
comprehensive account of the concepts and issues
central to the grid computing framework is given in
(Foster and Kesselman, 2004). One central element
in CG management is the resource model underlying
the various grid decision-making strategies;
including resource discovery, resource state
dissemination, and job scheduling. Traditionally, the
grid resource model is constructed as a dictionary of
uniquely identified computing hosts with attributes
such as CPU slots, RAM and Disk space, etc. Hence
it captures the physical view of the grid resources.
Architectural variants of this Physical Resource
Model (PRM) have been utilized in the grid
management strategies; including resource state
dissemination (Iyengar et al., 2004; Krauter et al.,
2002; Maheswaran, 2001; Wu et al., 2004);
scheduling (Casavant and Kuhl, 1988; He et al.,
2003; Spooner et al., 2003; Sun and Ming, 2003;
Yang et al., 2003); and resource discovery (Bukhari
and Abbas, 2004; Dimakopoulos and Pitoura, 2003;
Huang et al., 2004; Ludwig, 2003; Maheswaran,
2001; Zhu and Zhang, 2004). The reliance of the
management strategies on the physical view of grid
resources entails the need for complex multi-
dimensional search strategies and a considerable
level of resource state information exchange
between the grid management domains. The
adoption of the Service Oriented Architecture (SOA)
as stipulated by the Open Grid Services
Infrastructure (OGSI) recommendation (Tuecke et
al., 2003), requires a reformulation of the
relationship between the grid resource model and the
decision-making mechanisms. In this paper we
explore the development of a model of resources
that captures a service-oriented logical view of the
grid resources (see figure 1).
146
Derbal Y. (2005).
SERVICE ORIENTED GRID RESOURCE MODELING AND MANAGEMENT.
In Proceedings of the First International Conference on Web Information Systems and Technologies, pages 146-153
DOI: 10.5220/0001235001460153
Copyright
c
SciTePress
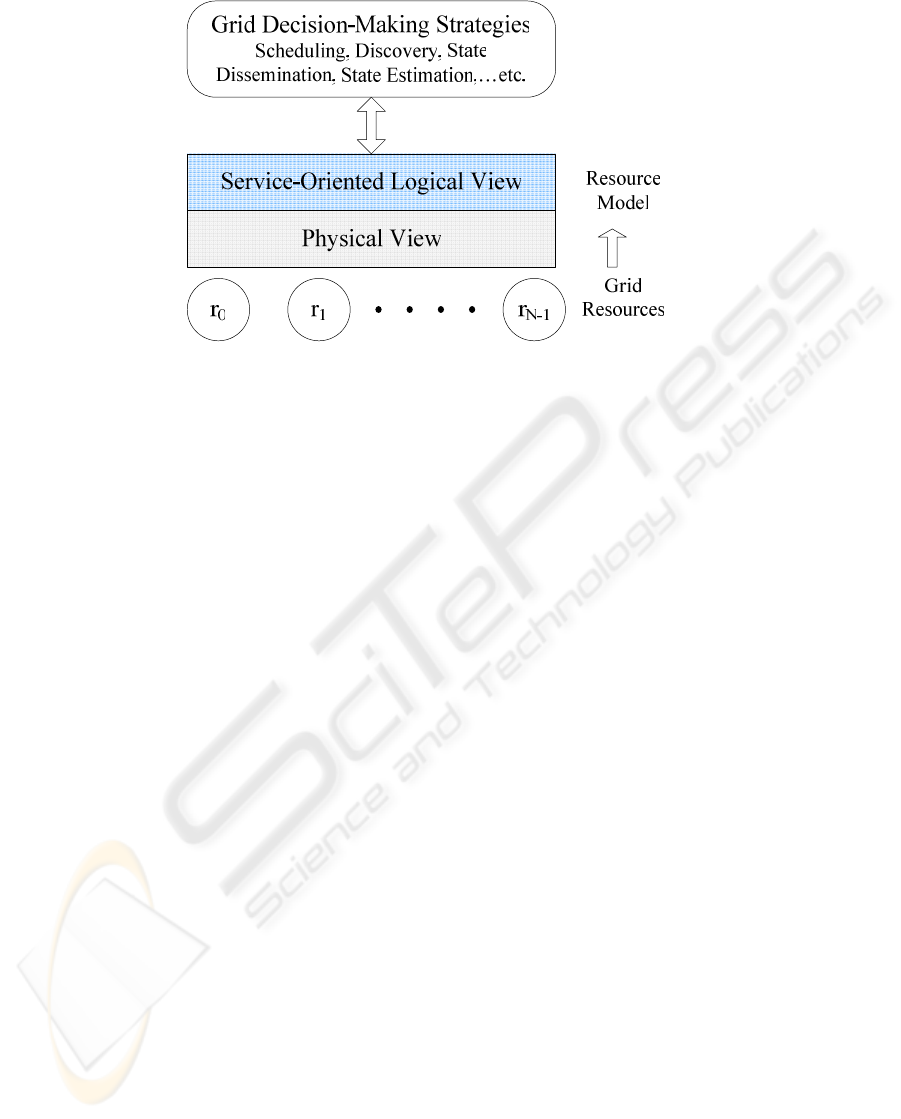
Figure 1: Relationship between the grid resource model and the decision-making strategies
The motivation behind this model is this: the CG
ability to handle a service request relies in the end
on the available aggregate capacity of the hosting
environment to satisfy the resource requirements of
the service in question. Hence, it is intuitively more
appropriate, for the decision-making strategies, to
rely on a capacity model that captures a service-
oriented logical view of the aggregated behavior of
the resources. To the best of our knowledge, this
new approach to grid resource modeling has not
been explored with the exception of one related
research result reported in (Graupner et al., 2003).
In this work a metric, called server share, is
introduced to quantify the capacity of a server
environment to handle a class of service requests.
The server share unit is defined as the maximum
server load related to an application deemed to be a
benchmark for the class of services in question. This
approach has been applied to a single management
domain and has resulted in a significant
simplification of the management mechanisms
(Graupner et al., 2003). Since the definition of the
server share unit depends on a chosen benchmark
application, an extension of the approach to an open
CG environment, which includes distinct
management domains, would require a significant
standardization effort. Benchmark applications
would have to be selected as part of a community
standard and thereafter continuously updated to
account for new classes of services. Although
theoretically conceivable and applicable to a single
closed management domain, this approach to the
quantification of the aggregated hosting behaviour
may not be feasible for the open environment of a
commercial or scientific CG. In contrast our
proposed quantification of the hosting capacity is
independently managed by the provider and
therefore will not require any prior normalization
among the distinct management domains spanned by
a CG.
The paper is organized as follows: Section 2
provides an overview of a nominal architectural
organization of CGs. A description of the proposed
SOM is given in section 3. Section 4 presents a
service management approach associated with the
application of SOM. The paper is concluded in
section 5.
2 GRID ARCHITECTURAL
FRAMEWORK
The framework under consideration views the grid
as a dynamic federation of resource clusters
contributed by various organizations. Each cluster
constitutes a private management domain. It
provides a set of grid services which are exposed in
compliance with the OGSI recommendation.
Clusters may join or leave the grid at any time
without any disruption to the grid operation. The
effect of this operation is limited to the configuration
of neighboring clusters. Each cluster includes a set
of agents that host the offered services (figure 2).
One agent, labeled the principal, is designated to
coordinate inter-cluster operations such as the
dissemination of available resource state, and the
delegation of service requests. The lines linking the
clusters define the pathways of the resource state
information exchange. The resulting topology, has
the robustness properties of a Power Law network.
SERVICE ORIENTED GRID RESOURCE MODELING AND MANAGEMENT
147
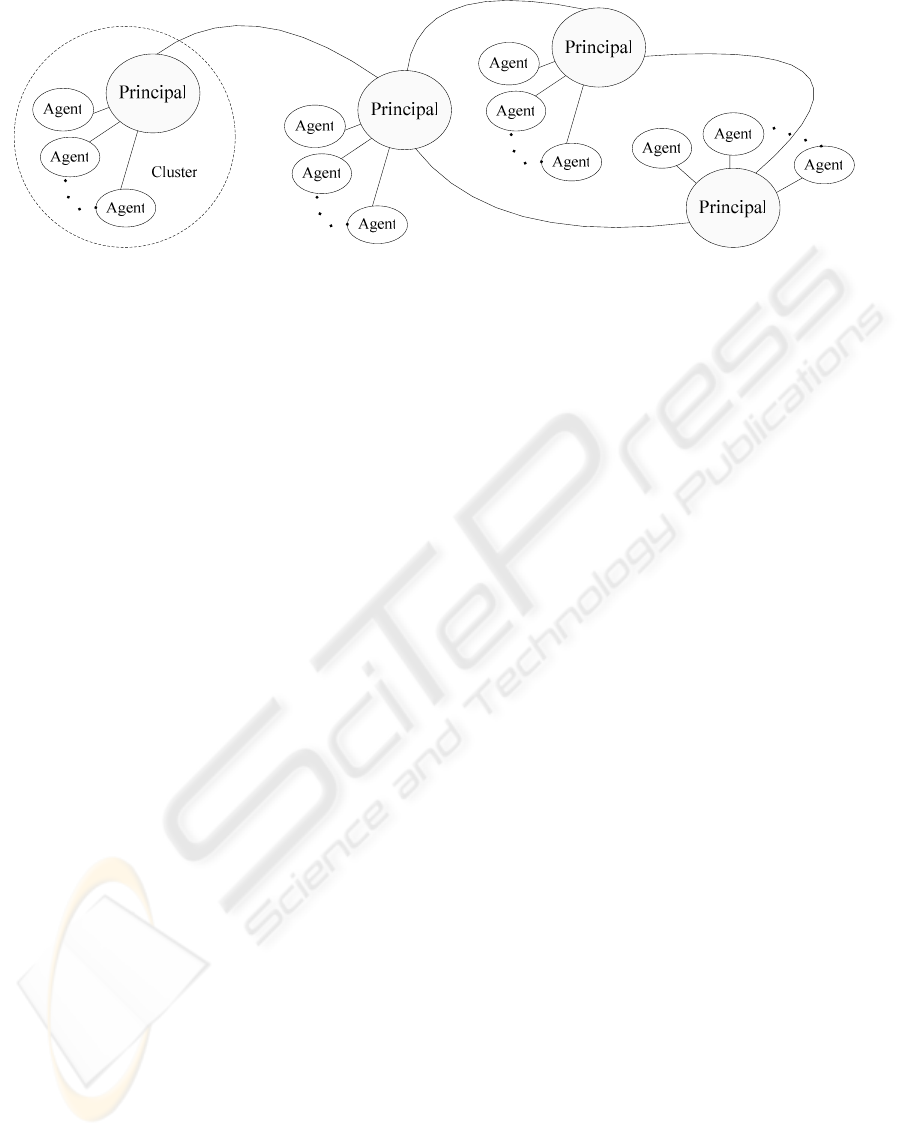
Figure 2: The grid as a federation of cluster
In such network most nodes have few links and few
nodes have numerous links (Barabási and Albert,
1999; Faloutsos et al., 1999). In this topology, that
we call Grid Neighborhood (GN) topology, there are
no restrictions on the IP connectivity between any
pair of grid clusters. In fact it is essential that such
connectivity be available for the implementation of
grid-wide scheduling strategies and service request
delegations among peer clusters. Furthermore, we
will assume that each resource cluster has the
capability to schedule as well as handle service
requests for which it has the required resources.
Clusters are also assumed to have the capability to
delegate the handling of service requests to other
clusters in function of some inter-cluster Service
Level Agreements (SLAs) (Al-Ali et al., 2004).
These agreements would include policies that
govern inter-cluster interactions such as the
exchange of resource state information.
Many of the assumptions concerning the CG’s
architectural framework are not strictly necessary.
They are stated in order to provide a clearer context
for the development of the proposed service-oriented
resource model.
3 SERVICE-ORIENTED GRID
RESOURCE MODEL
Consider a User Service Request (USR) submitted
to a grid cluster. Let us assume that such request
requires for its handing the availability of a single
grid service. Such availability would necessarily go
beyond the assertion that the required grid service is
indeed deployed. In particular, the hosting
environment has to possess a sufficient resource
availability for the instantiation of the grid service in
question, the subsequent invocation of its operations,
and the maintenance of it state (for a statefull grid
service). The required resources may include CPU
slots, RAM, other service components, special
hardware devices, disk space, swap space, memory
cache as well as any required licenses of application
software that the service instance may need for its
successful operation. If the service needs for its
execution a specific OS, some processor
architecture, or the presence of a Java Virtual
Machine (JVM) and possibly a required heap size,
then these would be part of the set of required
resources. Let
{
}
01
,
,...,
N
R
rr r= be the set of
resources owned by a given cluster. Each
rR
∈
takes on a finite or countable number of possible
states of availability. The set of all possible states for
resource
rR
∈ is denoted by
()
r
Ω . Then we can
define the function
()
1
()
0
:,
i
N
r
i
R
−
=
Φ→Ω
∪
which
returns the actual state of a given resource
rR
∈ at
a discrete time
n∈ . is the set of natural
numbers. Let
()s
RR
⊂ be the resource subset
required for the execution of a
service
{
}
0
11
, ,...,
M
sS ss s
−
∈= , where
S
is the
set of grid services deployed on the cluster in
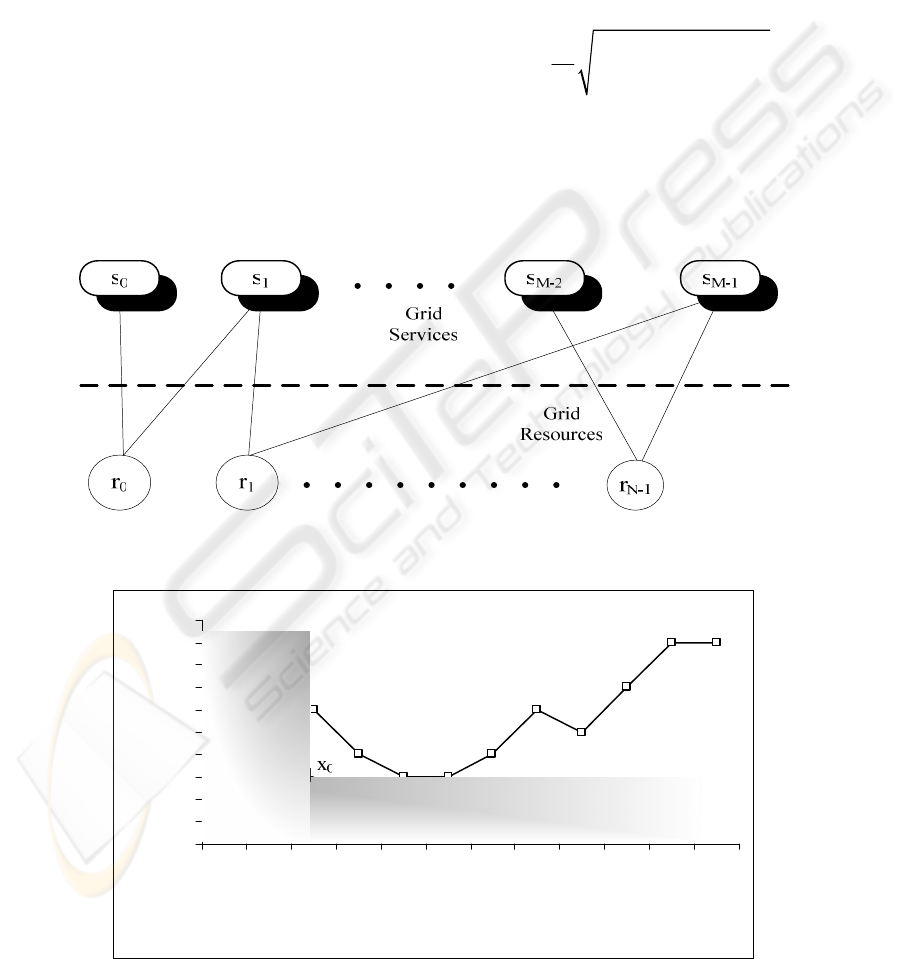
question. These services will have competing needs
towards the cluster resources, hence the schematic of
figure 3. Let
()
n
s
Σ be the availability state vector
associated with the resource set
()
s
R
at time
n
. Each
element of this state vector represents the
availability state of a resource
()
s
r
R∈ , which can
be determined using
(
.,
.)
Φ . The dynamics of the
state vector
()
n
s
Σ reflects the time-varying
aggregated capacity of the hosting environment to
handle a request targeting service
s
. For a resource
set
()
s
R
of cardinality
K
, the resource state vector
WEBIST 2005 - INTERNET COMPUTING
148
span a set
s
Λ defined as the union of all possible
ordered
K
-tuplets
()
01 1
()
(
)()
, ,...,
K
rr r
xx x
σσ σ
−
where
(
)(
)
i
i
r
r
x
σ
∈Ω , and
()
,
0,..,
1
s
i
rRi K∈= −. Now
consider the point
*
s
Σ on the trajectory of
()
n
s
Σ where its elements are at the lowest state of
availability that would allow the instantiation,
execution and maintenance of a single instance of
service
s
. This is defined as the representative point
for the unit service capacity of the hosting
environment vis-à-vis service
s
. This unit will be
called a servslot. For example, consider a grid
service that rely on two physical resources
a
r
(CPU
slots), and
b
r
(swap memory). Let us assume that an
experimental profiling of the aggregated behaviour
of
a
r
and
b
r
resulted in a trajectory of the state
vector for which the hosting environment was able
to provide the service (see figure 4). The shaded area
represents the regions of
s
Λ where the hosting
environment was not able to offer the grid service in
question for lack of resource availability. Now let us
define the subset
ss
Γ⊂Τ so that for any
s
z∈Γ
we have:
0
0
(
,)min(,
)
s
x
d
zx dzx
∈Τ
= (1)
()
1
2
() ()
0
1
(
,) ( , )
ii
k
rr
xy
i
dxy
K
ησ σ
−
=
=
∑
(2)
s
Τ represents the points on the trajectory of the
resource state vector corresponding to sufficient
resource availability.
Figure 3: Relationship between the resources and the grid services
0
1
2
3
4
5
6
7
8
9
10
S
w
ap
1
0
0
2
0
0
3
00
4
0
0
5
0
0
6
0
0
7
0
0
800
9
0
0
1000
1100
Swap Size (Megabytes)
CPU Slots
Figure 4: An example of a resource availability profile
SERVICE ORIENTED GRID RESOURCE MODELING AND MANAGEMENT
149

In the above relations
x
and
y
are two points of the
()
n
s
Σ trajectory, and
(
)() (
)
,
i
ii
r
rr
xy
σσ
∈Ω are their
respective coordinates.
:( , )
ss
d
+
ΛΛ → defines
the distance between two points of the state vector.
+
is the set of non-negative real numbers. The
state distance
11
() ()
00
:( , )
ii
KK
rr
ii
η
−−
+
==
ΩΩ→
∪∪
is
defined in a fashion that fits the nature of the
resource in question. For a resource such as CPU
slots, the state distance is simply the difference
between the numbers of slots associated with the
two respective states. For a resource such as an
Operating System (OS) or a CPU architecture, the
distance between two states may either be 0 or
infinity. In the first case the two states represent the
same OS, while in the second case they represent
two different Operation Systems. Let
be a partial
ordering on
()
s
R
where
ab
rr
,
()
,
s
ab
r
rR∈ if and
only if
a
r
is said to be more costly than
b
r
according to some chosen resource cost function.
Without loss of generality let us assume that the
ordering on the
K
dimensional
()
s
R
resulted in the
relation
0
12
1
...
K
r
rr r
−
. Then the previously
introduced special point
*
s
Σ of the state vector used
to define the servslot unit can now be quantitatively
determined as the element
s
y∈Γ that satisfies:
00
(
() () ()
)
(
,)min(,
)
ii ii
s
rr rr
yx xx
x
ησ σ ησ σ
∈Γ
= (3)
Where
0
,..
.
ij
= , and j
K
≤ is the smallest value
for which the above relation is satisfied. In summary
relation (3) allows the selection of the element of the
set
s
Γ whose most “costly” resource coordinates are
the closest to the resource coordinates of the
point
0
x
. If it was found that j
K
= , then the
elements of
s
Γ are equidistantly located relative
to
0
x
, and hence any element of the set can be used
to define the servslot unit. With the definition of a
servslot as a unit of the aggregated capacity of the
hosting environment, each cluster can maintain an
updated registry of hosted services and their
respective available service capacities expressed in
servslots (see Table 1).
Table 1: SOM Registry – Example
Service Name Service
Capacity
(servslots)
Description
s
0
4 …
s
1
3 ….
…
The collection of service registries associated
with the individual grid clusters make up the
service-oriented logical view of the grid resource
model. As mentioned earlier, the quantification of
the aggregated capacity of the hosting environment
simplifies the grid management mechanisms. For
instance, the resource state information would be
exchanged through the dissemination of the
capacities of the hosted services rather than using a
dictionary of resource names and their extensive
attribute name-value maps. However, since the
servslot unit is tied to a service or a class of services,
a quantitative description of the servslot unit, i.e.
detail description of the
*
s
Σ point of the resource
state vector, has to be published as part of the
service description. For the service discovery and
scheduling, the use of a service-oriented resource
model (see Table 1), clearly reduces the complexity
of the search processes inevitably present in both
decision-making mechanisms.
The practical utility of the above model relies on
the definition of the servslot unit, itself dependent on
the profiling of the dynamics of the resource state
vectors associated with the hosted grid services. In
practice, such profiling poses a considerable
challenge. The number of agent hosts associated
with a single cluster is expected to be very high
(>100,000). The profiling of the availability of the
hosted services (i.e. the dynamics of their associated
resource state vectors) requires a service availability
monitoring and management mechanism that
operates at the agent level as well as the cluster
level. Such mechanism would have to be scalable to
handle large clusters. It also needs to be sufficiently
sophisticated to deal with the fact that different grid
services share common resources (
{}
()s
sS
R
∈
≠∅
∩
).
However, because the process is independently
carried out by the various management domains we
believe it to be practically feasible. Furthermore, it is
expected that the rapid advances in autonomic
computing will provide the necessary approaches
and technologies to address the above challenges of
service profiling, monitoring and management
mechanisms (Lanfranchi et al., 2003).
WEBIST 2005 - INTERNET COMPUTING
150

The next section explores a service management
approach that reflects the integration of the proposed
service-oriented resource model with the grid
decision-making mechanisms.
4 SERVICE MANAGEMENT
The proposed service-oriented grid resource model
is a necessary step in the progression towards the
full adoption of the service oriented architecture for
grid systems. With the expected reduction in the
complexity of grid management processes, the
realization of the proposed model requires a service
management framework that incorporates the
following:
1. A mechanism for the monitoring and
management of service availability. As the
grid services claim and use the shared
resources of their home cluster, their
available capacities has to be updated
accordingly. In other words the actual
availability of the physical resources (CPU,
RAM, Swap, Disk space, etc.) has to be
regularly translated into service capacity
values of the dependent services.
2. A calibration process that should be
executed on service deployment in order to
determine the
*
s
Σ point and hence specify
the quantitative definition of the servslot
unit associated with the service. During this
process, configuration parameters may be
provided, as part of the service deployment
file, to define the states (i.e.
()
r
Ω )
associated with the individual resources
required by the service.
3. A cluster-bound resource registry that
maintains an up to date dictionary of the
cluster resources and their current attribute
values. This may be called the physical
model of the grid resources. The model
may be maintained as an XML document
that complies with a community standard
schema. Alternatively, a representation
similar to the Microsoft Common
Information Model (CIM) (Desktop
Management Task Force, 1999.) may be
used for the purpose.
4. A cluster-bound SOM registry (see Table
1) that maintains a record of the capacity of
the hosted grid services.
Figure 5 illustrates the possible integration of these
elements as part of a nominal CG architecture. The
Service Manager (SM) is responsible for the
calibration mechanism as well as the monitoring and
management of the service availability. The resource
load accounting maintained by the Cluster Resource
Manager is used by the SM to regularly update the
available capacities of the hosted services. This
requires a well defined mapping between the
residual levels of the grid resources and the available
service capacity. For a set
{
}
0
11
, ,...,
M
Sss s
−
= of
services that relies on a
K
-dimensional set
()
s
R
of
resources, the mapping between the service
capacities ad the resource states of availability can
be written as follows:
()
()
0
0
1
1
(,)
()
..
.
..
()
(
,)
M
K
rn
cn
cn
r
n
γ
γ
−
−
⎡
⎤
Φ
⎡⎤
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
=Θ
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
Φ
⎢
⎥
⎣⎦
⎣
⎦
(4)
()
i
c
n ,
0
,...,
1
iM=−is the service capacity of
i
s
at the discrete time
n
.
()
(
,
)
j
r
n
γ
Φ ,
0
,...,
1
jK=−, represents the residual level of
resource
j
r
. The function
()
.
γ
is a normalization
function that translates the availability state of a
resource into a non-negative real number which
represents the residual level of the resource. The
MK
× matrix Θ is called the Resource-Service
Mapping (RSM) matrix. The element of
Θ are non-
negative real numbers. The proposed formulation of
the service-resource mapping given in relation (4)
illustrates:
1. The coupling between distinct grid services
due to their reliance on common resources.
2. The aggregation of resource availability
levels into service capacities.
3. The relationship between the physical view
of the grid resource model (resources) and
the logical view of the model (services).
SERVICE ORIENTED GRID RESOURCE MODELING AND MANAGEMENT
151
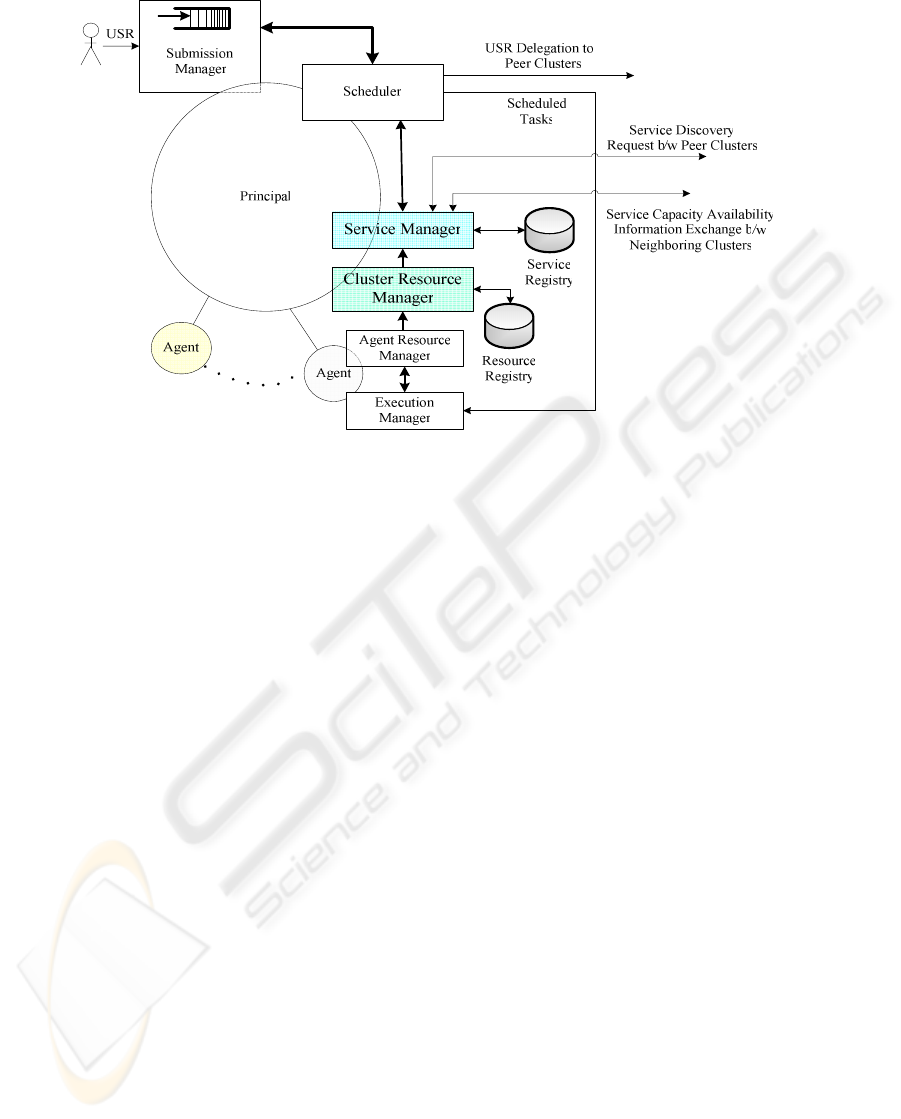
Figure 5: Cluster architecture to reflect the inclusion of the proposed service oriented grid resource model.
The element of the RSM matrix may not necessarily
be constant. However, it is reasonable to assume that
they are slowly time-varying so that we can write the
following relation:
0
(
)(
)
n
nΘ=Θ+∆Θ (5)
0
Θ may be determined through tests of service
requests submitted to the hosting environment.
()
n
∆Θ is a variable term to be adaptively updated
during the operation of the grid. One of the
candidate adaptation signals is the discrepancy
between the published service capacity and the
observed performance data that may be collected
from the hosting environment while handling the
services in question. There is a large pool of
adaptation strategies available from control theory
that can be used for this purpose (Cangussu et al.,
2004; Zhu and Pagilla, 2003). In (Reed and Mendes,
2005), a dynamic adaptation provides a soft
performance assurance for grid applications that rely
on shared resources. The offered insight is an
encouraging step towards the future development of
adaptation strategies in CGs; including the synthesis
of adaptive estimation schemes for the problem at
hand. Given the limited space of this paper, the
adaptive estimation of the RSM matrix will be
addressed in future works.
5 CONCLUSIONS
In light of the adopted SOA for CGs, the paper
questions the utilization of the physical view of the
grid resource model in the grid decision-making
mechanisms. A proposed service oriented logical
view of the grid resource model is argued to be a
more appropriate alternative for the new service
oriented grid computing paradigm. The new
approach relies on the quantification of the
aggregated resource behavior into a service hosting
capacity metric of the grid environment. A
preliminary analysis of the proposed model reveals
numerous challenging issues relevant to its
application, implementation and integration within a
nominal architecture of CGs. A formulation of a
subset of these issues is presented along with
directions for future works.
REFERENCES
Al-Ali, R., Hafid, A., Rana, O., and Walker, D., 2004. An
approach for quality of service adaptation in service
oriented Grids. Concurrency Computation Practice
and Experience. Vol. 16, no. 5, pp. 401-412.
Barabási, A., and Albert, R., 1999. Emergence of Scaling
in Random Networks. Science. Vol. 286, no. 5489, pp.
509-512.
Bukhari, U., and Abbas, F., 2004. A comparative study of
naming, resolution and discovery schemes for
WEBIST 2005 - INTERNET COMPUTING
152

networked environments. In Proceedings - Second
Annual Conference on Communication Networks and
Services Research, pp. 265 - 272.
Cangussu, J. W., Cooper, K., and Li, C., 2004. A control
theory based framework for dynamic adaptable
systems. In Proceedings of the ACM Symposium on
Applied Computing, pp. 1546-1553.
Casavant, T. L., and Kuhl, J. G., 1988. A Taxonomy of
Scheduling in General-Purpose Distributed Computing
Systems. IEEE Transactions on Software Engineering.
Vol. 14, no. 2, pp. 141-155.
Desktop Management Task Force, 1999., Common
Information Model (CIM),
http://www.dmtf.org/spec/cims.html.
Dimakopoulos, V. V., and Pitoura, E., 2003. A peer-to-
peer approach to resource discovery in multi-agent
systems. In Lecture Notes in Artificial Intelligence
(Subseries of Lecture Notes in Computer Science), pp.
272.
Faloutsos, M., Faloutsos, P., and Faloutsos, C., 1999. On
power-law relationships of the Internet topology.
Computer Communication Review. Vol. 29, no. 4, pp.
251-262.
Foster, I., and Kesselman, C., 2004, The grid: blueprint for
a new computing infrastructure, Morgan
Kaufmann;Elsevier Science, San Francisco,
Calif.Oxford, pp. 748.
Graupner, S., Kotov, V., Andrzejak, A., and Trinks, H.,
2003. Service-centric globally distributed computing.
IEEE Internet Computing. Vol. 7, no. 4, pp. 36 - 43.
He, X., Sun, X., and Von Laszewski, G., 2003. QoS
guided Min-Min heuristic for grid task scheduling.
Journal of Computer Science and Technology. Vol.
18, no. 4, pp. 442-451.
Huang, Z., Gu, L., Du, B., and He, C., 2004. Grid resource
specification language based on XML and its usage in
resource registry meta-service. In Proceedings - 2004
IEEE International Conference on Services
Computing, SCC 2004, pp. 467 - 470.
Iyengar, V., Tilak, S., Lewis, M. J., and Abu-Ghazaleh, N.
B., 2004. Non-Uniform Information Dissemination for
Dynamic Grid Resource Discovery. In, pp.
Krauter, K., Buyya, R., and Maheswaran, M., 2002. A
taxonomy and survey of grid resource management
systems for distributed computing. Software - Practice
and Experience. Vol. 32, no. 2, pp. 135-164.
Lanfranchi, G., Peruta, P. D., and Perrone, A., 2003.
Toward a new landscape of systems management in an
autonomic computing environment. IBM Systems
Journal [H.W. Wilson - AST]. Vol. 42, no. 1, pp. 119.
Ludwig, S. A., 2003. Comparison of centralized and
decentralized service discovery in a grid environment.
In Proceedings of the IASTED International
Conference on Parallel and Distributed Computing
and Systems, pp. 12.
Maheswaran, M., 2001. Data dissemination approaches for
performance discovery in grid computing systems. In
Proceedings of the 15th International Parallel and
Distributed Processing Symposium (IPDPS '01), pp.
910 - 923.
Reed, D. A., and Mendes, C. L., 2005. Intelligent
Monitoring for Adaptation in Grid Applications.
Proceedings of the IEEE. Vol. 93, no. 2, pp. 426 - 435.
Spooner, D. P., Jarvis, S. A., Cao, J., Saini, S., and Nudd,
G. R., 2003. Local grid scheduling techniques using
performance prediction. IEE Proceedings: Computers
and Digital Techniques. Vol. 150, no. 2, pp. 87-96.
Sun, X.-H., and Ming, W., 2003. Grid Harvest Service: a
system for long-term, application-level task
scheduling. In Parallel and Distributed Processing
Symposium, pp.
Tuecke, S., Czajkowski, K., Foster, I., Frey, J., Graham,
S., Kesselman, C., Maquire, T., Sandholm, T.,
Snelling, D., and Vanderbilt, P., 2003, Open Grid
Services Infrastructure (OGSI), Global Grid Forum.
Wu, X.-C., Li, H., and Ju, J.-B., 2004. A prototype of
dynamically disseminating and discovering resource
information for resource managements in
computational grid. In Proceedings of 2004
International Conference on Machine Learning and
Cybernetics, pp. 2893-2898.
Yang, L., Schopf, J. M., and Foster, I., 2003. Conservative
Scheduling: Using Predicted Variance to Improve
Scheduling Decisions in Dynamic Environments. In
Proceedings of Supercomputing 2003, pp.
Zhu, Y., and Pagilla, P. R., 2003. Adaptive Estimation of
Time-Varying Parameters in Linear Systems. In
Proceedings of the American Control Conference, pp.
4167-4172.
Zhu, Y., and Zhang, J.-L., 2004. Distributed storage based
on intelligent agent. In Proceedings of 2004
International Conference on Machine Learning and
Cybernetics, pp. 297-301.
SERVICE ORIENTED GRID RESOURCE MODELING AND MANAGEMENT
153
