
HUMAN COGNITIVE SIMULATION FOR EVALUATION OF
HUMAN-ROBOT INTERFACE
A trade-off between flexibility in robot control and mental workload
Hiroshi Furukawa
Department of Risk Engineering, University of Tsukuba, 1-1-1 Tenoudai, Tsukuba, Japan
Keywords: mental workload, cognitive modeling, flexibility, adaptable automation, delegation, human-robot
interaction
, manual control, Playbook, multiple robots.
Abstract: Adaptable automation is a scheme that human operators can modify function allocations among human and
machines (or robots) dynamically depending on situations. The concept is that operators should be able to
delegate tasks to autonomous agents at times of their own choosing. Playbook is an example of a delegation
architecture based on a team’s book of approved plays that provides a “common language” for efficient and
effective communication between human operators and agents. The author attended an empirical study
examined the efficacy of Playbook interface using the Roboflag simulation platform. The results confirmed
the benefits, compared to less flexible interfaces which are susceptible to negative effects due to suboptimal
automation or unexpected events. This benefit was somewhat reduced, however, when the number of robots
was increased. At this higher load, the benefit may have been reduced due to the greater workload demand
imposed by full flexibility. This paper described a probabilistic simulation method to estimate behaviors of
human operators as a tool for evaluating human-robot interfaces for operation of multiple robots. Through
its application to the multiple robots simulation, advantages and costs of different design alternatives has
been investigated in terms of cognitive workload indexes of the human operators. The results may suggest
the validity of the hypothesis that there is a trade-off between flexibility in operational alternatives and
operator’s mental workload.
1 INTRODUCTION
Proper function allocation between humans and
machines is one of the design requirements to
optimize the advantages of automation, such as
extraordinary precision, higher processing
capabilities, and extension of the operator's
perceptual and cognitive capabilities (Sheridan,
2000). The function allocation may foster human-
machine interactions where “human performance
and machine performance are not a zero-sum game,
implying that the combination can be much better
that either by itself” (p. 204, Sheridan, 2000).
To apply the function allocation strategy to
actual syste
m designs, it may be necessary to
conduct quantitative evaluations of design
alternatives that consider specific factors in task
situations, such as time constraints, timing of actions,
error rates, and limitation of resources. Particularly
in complex systems, e.g. operations of multiple
robots, most situations are not static but dynamic,
and proper allocation may differ by situation. For
example, cognitive experiment with such design
alternatives is one of typical methods for the
quantitative evaluation.
Adaptable automation is one of promising
sch
emes for human interaction with automated
agents, which allows human operators to modify
function allocations among human and machines (or
robots) dynamically depending on situations. The
concept claims that human operators should be able
to delegate (or not) tasks to autonomous agents at
times of their own choosing, and receive feedback
on their performance. There is growing number of
evidence that shows efficacy of the scheme
(Crandall & Goodrich, 2002; Parasuraman, Galster,
& Miller, 2003).
Playbook is an example of the delegation
archi
tecture based on a team’s book of approved
plays that provides a “common language” for
efficient and effective communication between
human operators and agents (Miller, Pelican, &
Goldman, 2000; Miller & Parasuraman, 2002). This
277
Furukawa H. (2005).
HUMAN COGNITIVE SIMULATION FOR EVALUATION OF HUMAN-ROBOT INTERFACE - A trade-off between flexibility in robot control and mental
workload.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 277-282
DOI: 10.5220/0001190702770282
Copyright
c
SciTePress
“common language” affords human and agents a
shared understanding of a goal to be achieved, and
actions or methods for achieving the goal with
varying levels of granularity.
Squire and his colleagues, including the author,
conducted the cognitive experiment using the
Roboflag simulation platform to examine the
efficacy of Playbook interface using eight different
control architectures (Squire, et al., 2004). The
results confirmed the benefits provided by a flexible
Playbook interface in which operators are
empowered to delegate (or not) tasks to automated
agents, compared to less flexible interfaces which
are susceptible to negative effects due to suboptimal
automation or unexpected events. This benefit was
somewhat reduced, however, when the number of
robots was increased. At this higher load, the benefit
may have been reduced due to the greater workload
demand imposed by full flexibility.
This paper shows the results of human cognitive
simulation of Roboflag operators to validate the
hypothesis that the performance benefit of the
flexible interface may have been countered due to
the greater management workload demand imposed
by the flexibility in the condition with 8 robots,
which the study suggested.
To achieve the goal, a method using human
cognitive simulation was used as a framework for
evaluating alternative designs of human-robot
interface. Because of their ability to capture the
dynamic interrelationships among system entities,
events, and processes, computer simulation models
have been recognized as an important class of
techniques for systems design and function
allocation (Sharit, 1997, Furukawa, et al., 2001,
Furukawa, et al., 2004, Inagaki & Furukawa, 2004).
2 EXPERIMENTAL
EVALUATION OF
“PLAYBOOK” INTERFACE
This section describes the previous study which
examined the efficacy of Playbook interface using
the Roboflag simulation platform and the results
about the benefits and costs compared to less
flexible interfaces (Squire, et al., 2004).
2.1 Playbook interface
The empirical study investigated the two dimensions
of adaptation flexibility offered by the Playbook:
abstraction and aggregation. The abstraction can be
thought of as in the multiple levels of a task
hierarchy, where primitive robotic behaviors, such
as waypoint-to-waypoint movement, are at the lower
level of abstraction. More complex behaviors such
as patrol border or defence (continuous planned
movement action and reaction to events such as
opponent attack) are at a higher level of abstraction.
Aggregation can be defined as the number of robotic
agents controlled as a group. Low aggregation refers
to commands given to individual agents, whereas
high aggregation refers to commanding all available
agents with the same command. An intermediate
level of aggregation is also possible where
commands can be given to groups of robots smaller
or equal to that of the whole team.
2.2 Comparative evaluation of
alternative interface designs
The Roboflag simulation was used as the platform to
examine the human performance effects using eight
different types of human-robot interface, each
corresponding to a combination of the abstraction
and aggregation dimensions. The task of participants
was to catch the opponent’s flag using own robots
against opponent’s robots. The number of robots
was equal on both side, i.e., either four or eight in
this study.
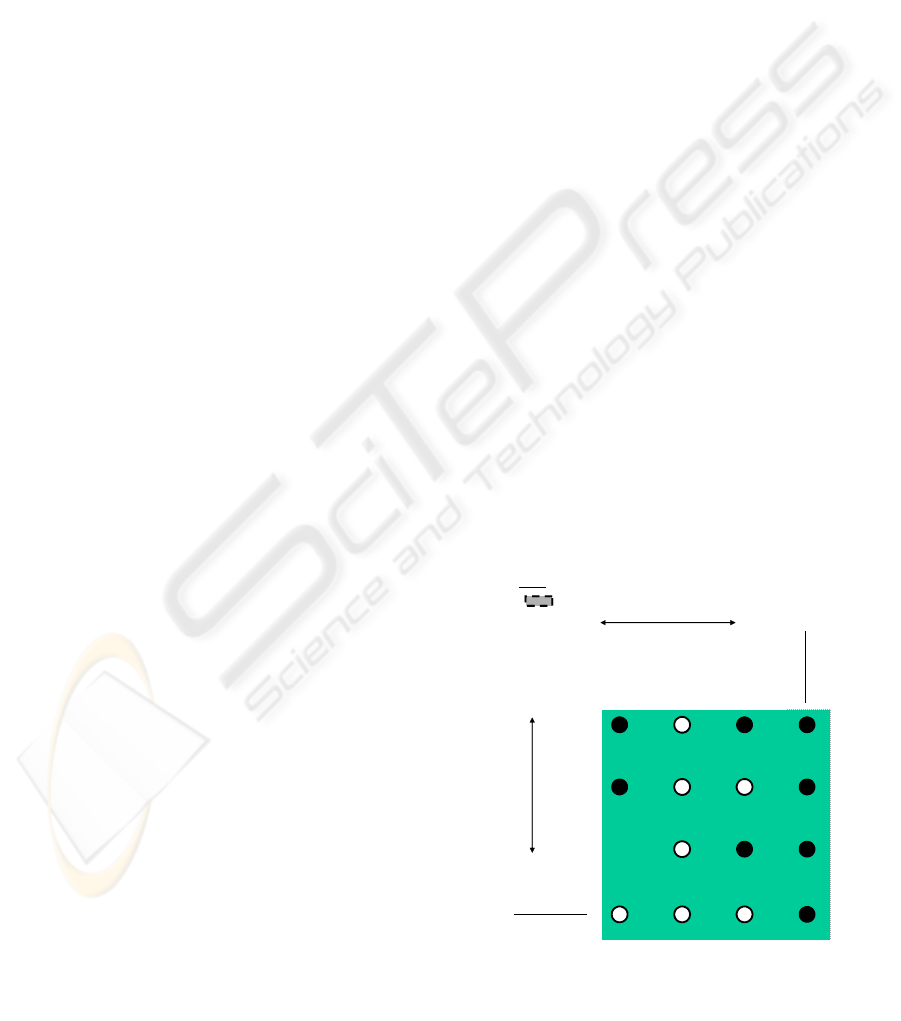
Figure 1 depicts all possible interface
combinations, and the eight experimental interfaces
(#1 - #8) used in the study. Interfaces #1 - #4
represented highly restricted Playbook interfaces,
and Interfaces #5 - #8 represented flexible Playbook
interfaces. The three levels of abstraction (y-axis in
Figure 1) included: waypoint control (user selects
endpoint destinations, point to point guidance), plays
(pre-programmed robotic behaviors, options being
1
Aggregation
Abstraction
Individual
Group
3
All
5
Selectable
Less
More
W ypt
P lay
Super-
Play
Less
More
Selectable
2
4
6
7
8
Key
Restricted
Interfaces
Figure 1: All possible interface combinations of the
dimensions of abstraction and aggregation. (Squire, et
al., 2004)
ICINCO 2005 - ROBOTICS AND AUTOMATION
278
circle defense, circle offense, patrol border), and
super-play (higher level group plays comprised of
more than a single play, requiring selection of more
than one robot, options being offense, defense,
mixed). The three levels of aggregation (x-axis in
Figure 1) were the selection of individual (one robot
at a time), a sub-group (number selectable from zero
to all), or all robots. Conditions within the
highlighted portion in Figure 1 represent flexible
control for either level of abstraction or level of
aggregation. According to this taxonomy, Interface
#8 had flexible control for both factors, whereas the
other seven were progressively less flexible.
2.3 Results and hypothesis
Performance was superior with flexible interfaces
for four robots, but this benefit was eliminated when
eight robots had to be supervised.
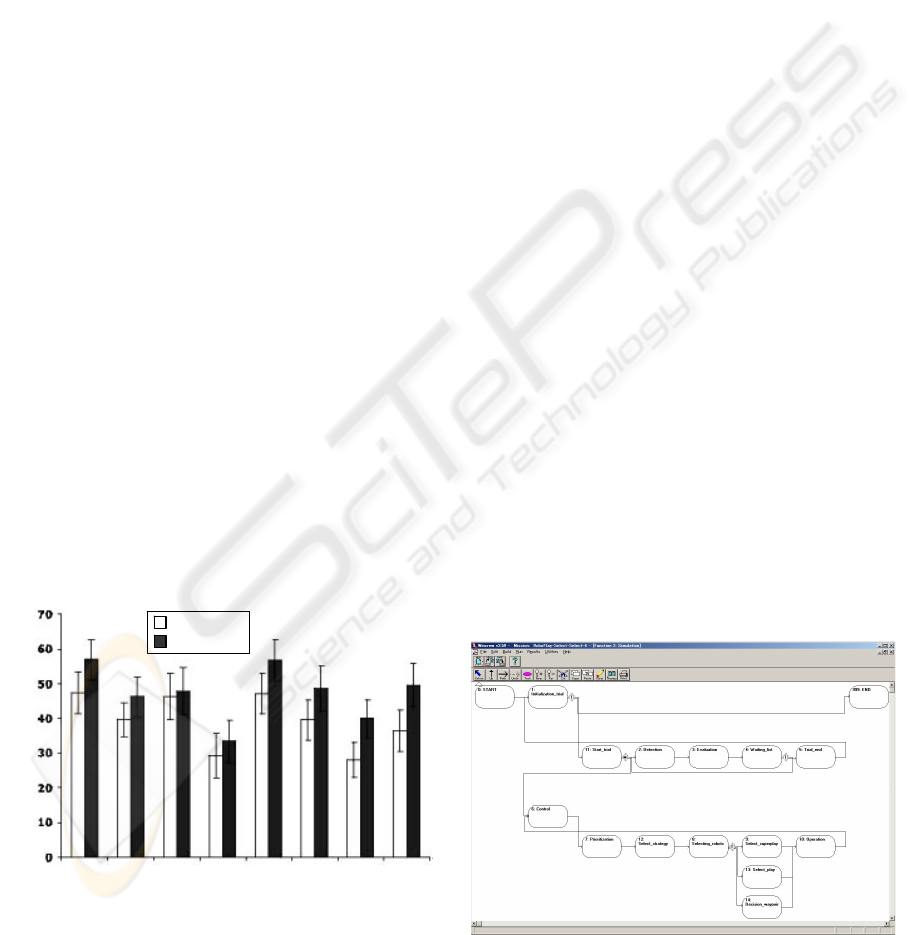
Analysis of the subjective mental workload
ratings revealed that the main effect of “Number of
Robots” and “Interface Type” were significant, as
was the interaction. Planned comparisons revealed
that participants reported significantly higher mental
workload when supervising eight robots compared
to four robots (see Figure 2). At this higher load, the
benefit of the flexible interfaces may have been
reduced due to the greater workload demand
imposed by full flexibility.
Also, participants reported higher workload for
conditions where only waypoint control was
available (individual waypoint, all waypoint, flexible
waypoint) than when automated plays were
available (individual play, all superplay, flexible
play, flexible superplay).
3 COGNITIVE SIMULATION OF
HUMAN-ROBOT
INTERARCION
This section shows human cognitive simulation of
human-robot interaction and the results of the
simulation of Roboflag operators to validate the
hypothesis about a trade-off between flexibility in
operational alternatives and operator’s mental
workload.
3.1 Human cognitive simulation
A simulation code for estimating behaviors of
human operators is developed to evaluate the eight
types of interface designs. The reason for using
simulation is that it is possible to have knowledge
with variety of situations with performing
parametric simulation. The parameters can be
selected for describing states of robots, environment,
and human operators. This approach may discover
effective parameters that change system behaviors,
which can not be revealed through empirical studies,
and/or which are not predicted in advance.
Through cognitive task analysis, processes in the
work are resolved into sets of cognitive tasks and
paths, which are called cognitive task network
models (Laughery, 1999). The granularity of one
task should be set so that it is reasonable to be
assumed that cognitive resources used by operators
are unchanged during the task. Figure 3 shows the
network model of robot control in Select-Select
condition, developed for this research.
The cognitive simulation is based on task
network models that consist of cognitive tasks by
human operators, tasks assigned to machines, and
sequential paths among them (Laughery, 1999).
Figure 2: Mean subjective workload for the eight interfaces
representing combinations of the abstraction an
d
aggregation dimensions
0
200
400
600
800
1000
1200
1400
1600
1800
Indi
v
idua
l
- Waypoi
n
t
In
di
vi
d
u
al- P
l
ay
All- W
ayp
o
in
t
Al
l-
Su
p
erplay
Se
l
e
c
t -
W
ay
po
in
t
Se
l
e
c
t-P
l
ay
Se
l
e
c
t
-S
u
p
e
rp
la
y
S
e
le
ct-
Se
le
ct
Interface Condition
Mean Est imated Time- Int egrat ed Workload
4 Robots
8 Robots
Mean Sub
j
ective Workload
4 Robots
8 Robots
Figure 3: A cognitive task network of robot control in
Select-Select condition
HUMAN COGNITIVE SIMULATION FOR EVALUATION OF HUMAN-ROBOT INTERFACE - A trade-off between
flexibility in robot control and mental workload
279
Task completion time for each task is estimated
by a probabilistic model using a normal distribution.
To avoid cases where negative values are provided,
the time domain was limited to truncate the
distribution. Momentary states of cognitive
resources are simulated with the Multiple Resource
Model proposed by Wickens and Yeh (Wickens &
Yeh, 1986), in which five types of resources are
defined: visual, auditory, cognitive, motor, and
speech. Indexes describing cognitive workload,
which are necessary to use the resources in
achieving tasks, are assigned in a model using data
from a reported database (Micro Analysis and
Design, 1997). Monte Carlo simulations provide
quantitative time data and total momentary workload
indices based on the estimated cognitive resources.
3.2 Task network models for
human-robot interaction
The task network model of the Roboflag operation
was constructed considering three fundamental steps
of the operators’ cognitive work: state recognition,
decision making, and operation. Fundamental
information about necessary tasks in the work was
defined through cognitive task analysis on the
experimental data.
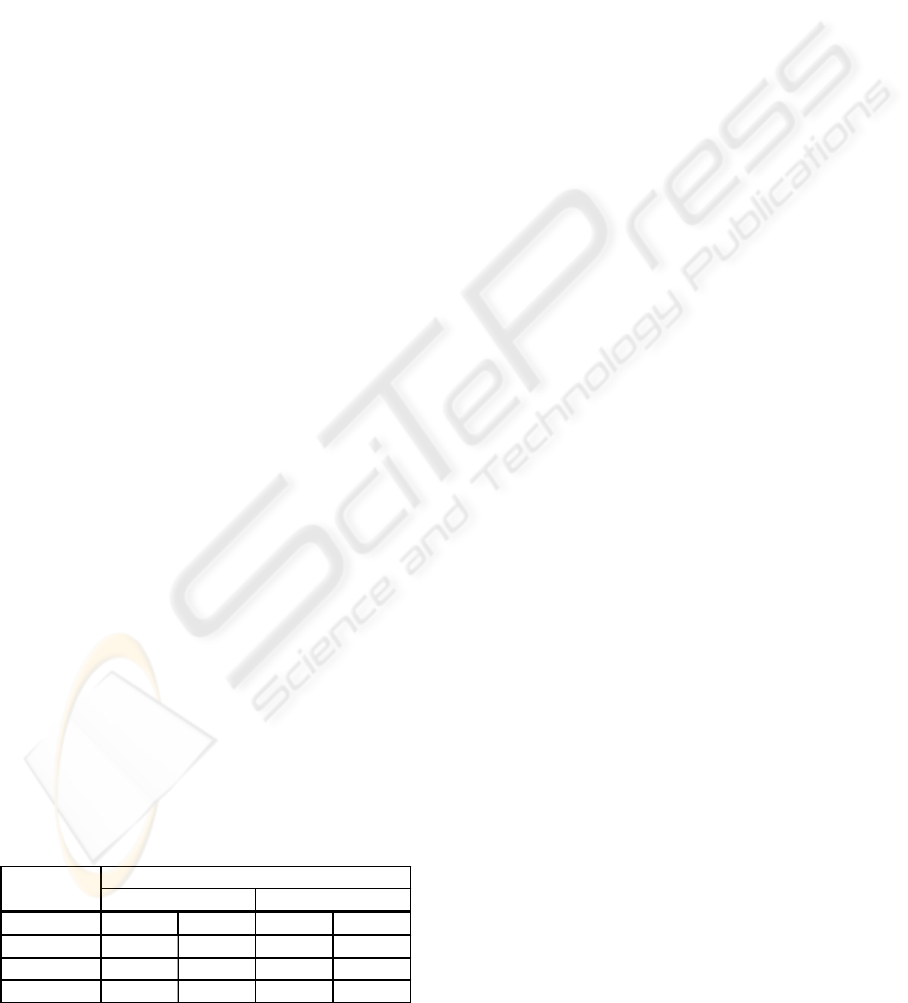
We considered two major factors in the model
that would affect cognitive work across the different
Roboflag interface types. One was the probability of
the need for the user to intervene manually in
controlling robots in order to ensure mission
success. For example, an operator assigned whole
robots an option of super-play, and then reassigns
some of the robots another play after he/she
recognized the former strategy was not appropriate
or turned inappropriate because the situation had
changed. We assumed that this probability would, by
definition, be relatively high for the waypoint-only
interface, lower for play operations, and much lower
for super-play operations. Also, we assumed a
higher probability when eight rather than four robots
had to be supervised, because the time constraint
must be highly related with the number. The actual
values assigned for the probabilities are shown in
Table 1.
Table 1: Probability of need for user’s manual intervention
in controlling robots (assumption in this study).
# of robots 4 8 4 8
Waypoint 0.15 0.3 0.2 0.4
Play 0.075 0.15 0.1 0.2
Su
p
er
p
la
y
0.0375 0.75 0.05 0.1
A
ll Select
The level of a
gg
re
g
at i on
The second factor was the operator’s time for
decision-making. We assumed that this would be
shorter when the number of operational alternatives
was small, and longer when the number was large.
For example, in the Select-Select condition, an
operator should choose from among three options,
waypoint, play, or super-play, then select the
number of robots to which the option should be
applied, and finally execute the plan.
The cognitive model estimates relative indexes
for mental workload of a human operator playing
Roboflag simulation with one of the alternative
interfaces.
3.3 Monte Carlo simulation
This simulation is implemented on a PC using
WinCrew (Micro Analysis and Design, Inc.), a
discrete event simulation-modeling tool (Laughery,
1999).
One thousand trials of Monte Carlo simulations
were performed for each of the eight human-robot
interfaces examined in the cognitive experiment
with either four or eight robots. To compare the
results under the different conditions, the simulated
operational time was set equally at 60 seconds.
4 RESULTS AND DISCUSSION
Figure 4 shows expected values and the standard
deviations of total time-integrated workload for each
of the eight interfaces.
As expected, workload was higher when eight
rather than four robots were supervised (
F(1,
15996)=60.297, p<.001
). This finding accords with the
result of the previous experiment.
Also, workload was higher when only waypoint
control was available (individual waypoint, all
waypoint, flexible waypoint) compared to when
automated plays could be used, with the exception
that relatively low values were found for the “All-
Waypoint” interface. Finally, workload was high in
the “Select-Select” interface, particularly when eight
robots were supervised. These simulation findings
closely parallel those reported in the empirical data
from the cognitive experiment (see Figure 2).
One exception is that the estimated workloads
were much lower than the subjective data in the
conditions that the level of aggregation is all (all
waypoint, all superplay). A possible reason of this
validation is that the assumption on the probability
of the need for the user’s manual intervention is not
appropriate, where the probability would be
relatively lower when the level of aggregation is
“All” and higher when the level is “Select.” To
ICINCO 2005 - ROBOTICS AND AUTOMATION
280
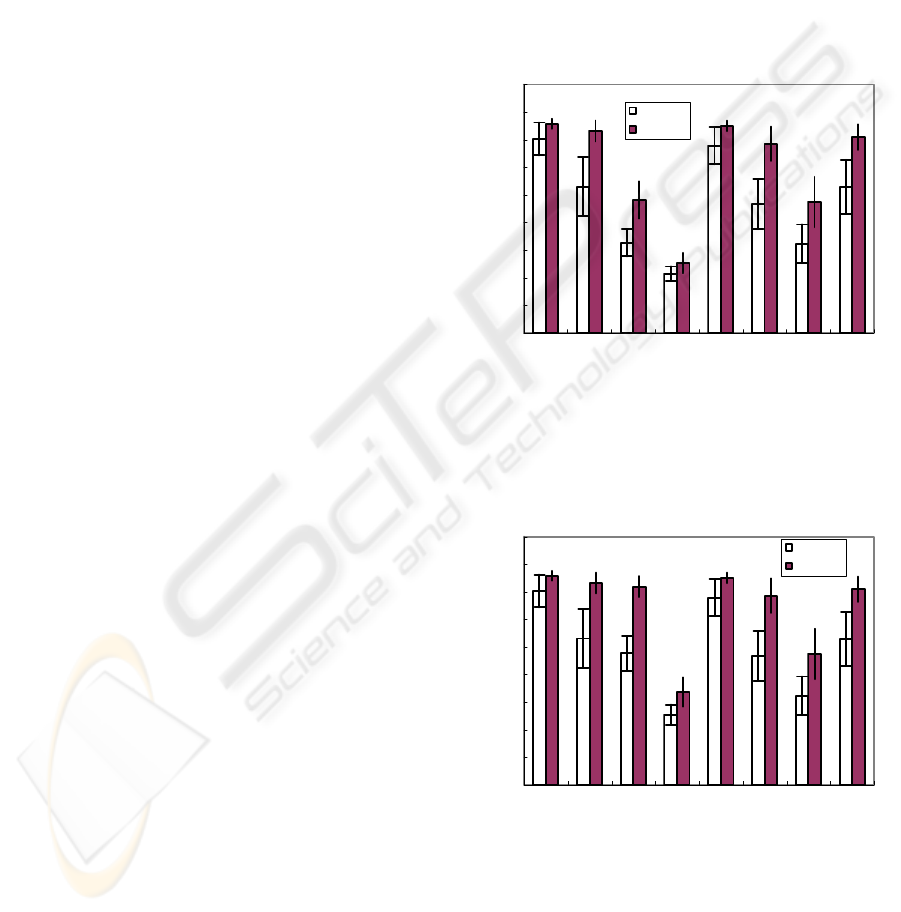
evaluate the possibility, the simulation was
conducted with the condition where the probability
in “Select” was used for that of “All” (see Table 1).
Figure 5 shows that the validations were improved
for both of “All-Waypoint” and “All-Superplay”.
This result may suggest that the probability of the
need for the user’s manual intervention does not
depend on the level of aggregation.
The cognitive model was constructed based on
empirical and objective data from experiments. The
results of the simulations agree with the qualitative
estimations about the interrelationships between
factors in human interface design and mental
workload that is necessary for human operators to
achieve their tasks. This may suggest the validity of
the hypothesis that the performance benefit of the
flexible interface may have been countered due to
the greater management workload demand imposed
by the flexibility in the condition with eight robots.
It is clear that the strengths and weaknesses of
each design alternative must be discussed
quantitatively considering appropriate contributing
factors. This case is also an example that the
computer modeling technique can be used as a
framework providing effective knowledge for
improvement of designs of human-robot systems.
Though fidelity of models developed in this
simulation is not high, it can be said that the models
include appropriate factors to achieve the purpose of
this simulation. Thus, this method can provide
valuable information for preliminary designing of
human-robot interface, such as necessary cognitive
workload for each of operators when a type of
interface is introduced in a simulation of multiple
robots.
5 CONCLUSIONS
The probabilistic simulation method to estimate
behaviors of human operators has been proposed as
a tool for evaluating human-robot interfaces for
operation of multiple robots.
Through its application to multiple robots game,
Roboflag, with one of the eight human-robot
interface based on Playbook design concept,
advantages and costs of different design alternatives
has been investigated in terms of cognitive workload
indexes of the human operators. The condition
parameters applied in this research are the number of
robots and the types of human-robot interface. The
results show that evaluation of interface is not
straightforward, and that situation dependency and
multiple indexes must be considered with great care
(Olson & Goodrich, 2003, Goodrich & Olsen, 2003,
Yanco, Drury & Sholtz, 2004).
ACKNOWLEDGEMENT
The author would like to express his thanks to Prof.
Raja Parasuraman and Mr. Peter Squire, George
Mason University, for informative discussions. This
work has been partially supported by Grants-Aid for
Science Research 16500076 of the Japanese
Ministry of Education, Science, Sports and Culture.
0
200
400
600
800
1000
1200
1400
1600
1800
In
d
ivi
d
ual- Waypoi
n
t
In
d
iv
id
u
a
l
-
Pl
ay
A
ll
-W
a
ypoint
A
ll-
S
up
er
p
la
y
Sel
e
ct -
W
ay
p
o
i
nt
Se
l
e
ct - P
l
a
y
Se
lec
t
-
S
u
pe
r
pl
a
y
S
e
le
c
t
-
S
el
ec
t
Int erf ace Condit ion
Mean Est imated Time- Int egrat ed Workload
4 Robot s
8 Robot
s
Figure 4: Mean expected values of time-integrated
workload from the simulation analysis for the eight
interfaces
0
200
400
600
800
1000
1200
1400
1600
1800
In
d
i
v
i
d
ua
l- W
a
y
p
o
i
n
t
I
n
div
i
du
a
l-
Pl
ay
All-
Wa
y
p
oin
t
A
l
l
-
Su
p
er
p
la
y
S
e
l
e
ct
-
W
a
yp
o
int
S
e
le
c
t- Play
Se
l
e
c
t-
S
up
e
rp
l
ay
S
e
l
e
ct
-
Se
l
e
c
t
Int erface Condit ion
Mean Est imat ed Time- Int egrat ed Workload
4 Robot s
8 Robot s
Figure 5: Mean expected values of time-integrated
workload from the simulation analysis for the eight
interfaces (results of re-simulations in All-Waypoint and
All-Superplay conditions with new parameter settings).
HUMAN COGNITIVE SIMULATION FOR EVALUATION OF HUMAN-ROBOT INTERFACE - A trade-off between
flexibility in robot control and mental workload
281

REFERENCES
Sheridan, T., (2000). Function allocation: algorithm,
alchemy or apostasy?
Int. J. Human-Computer Studies,
52, 203-216.
Fitts P., (1951). Human engineering for an effective air
navigation and traffic control system.
Ohio State
University Foundation Report
, Columbus.
Crandall, J., & Goodrich, M., (2002). Principles of
adjustable interactions. Human-Robot
Interaction, 2002 AAAI Fall Symposium (A.C.
Schultz, Chair). Menlo Park, CA: AAAI Press.
Parasuraman, R. Galster, S., & Miller, C. (2003). Human
control of multiple robots in the RoboFlag simulation
Environment.
Proceedings of the 2003 IEEE
International Conference on Man, Systems and
Cybernetics
. Washington, D.C.
Miller, C., Pelican, M., & Goldman, R. (2000). “Tasking”
interfaces for flexible interaction with automation:
Keeping the operator in control.
Proceedings of the
Conference on Human Interaction with Complex
Systems
. Urbana-Champaign, IL
Miller, C. & Parasuraman, R. (2002).
Designing for
flexible human-automation interaction: Playbooks for
supervisory control
, Technical Report, Minneapolis,
MN: Smart Information Flow Technologies.
Squire, P., Furukawa, H., Galster, S., Miller, C., &
Parasuraman, R., (2004). Adaptability and flexibility
are key! Benefits of the “playbook” interface for
human supervision of multiple unmanned vehicles.
Proc. Human Factors and Ergonomics Society 48th
Annual Meeting
, New Orleans, USA, September, 61-
65.
Sharit, J., (1997). Allocation of functions. In: Salvendy G.
(ed)
Handbook of Human Factors and Ergonomics.
John Willy & Sons, New York, 301-339
Furukawa, H., Sato, M., & Inagaki, T., (2001). A
probabilistic simulation method for evaluation of task
allocation schemes in ship management.
Proc.
Twentieth IASTED International Conference:
Modelling, Identification and Control 2001
, Innsbruck,
Austria, February, 533-538.
Furukawa H, Niwa, Y, & Inagaki, T. Optimization of task
allocation through human cognitive simulation: levels
of automation and human behaviors.
Proceedings of
7th International Conference on Probabilistic Safety
Assessment and Management & European Safety and
Reliability International Conference 2004
, Berlin,
260-265.
Inagaki, T., & Furukawa, H., Computer simulation for the
design of authority in the adaptive cruise control
systems under possibility of driver’s over-trust in
automation. Proc. 2004 IEEE International
Conference on Systems, Man & Cybernetics
, The
Hague, Netherlands, October.
Laughery K., (1999). Modeling human performance
during system design. Salas E (ed)
Human/technology
interaction in complex systems.
JAI Press, Stamford,
147-174.
Wickens C,, & Yeh Y., (1986). A multiple resource model
of workload prediction and assessment.
Proc. the
IEEE Conference on SMC
, 1044-1048.
Micro Analysis and Design, (1997).
User's manual of
WinCrew: Windows-based workload and task analysis
tool
, Micro Analysis and Design.
Olson, D., & Goodrich, M., (2003).
Metrics for evaluating
human-robot interactions
performance metrics for
intelligent systems.
Proceedings of Performance
Metrics for Intelligent Systems PerMIS '03
Goodrich, M., &. Olsen, D, (2003). Seven principles of
efficient human robot interaction.
Proceedings of the
2003 IEEE International Conference on Man, Systems
and Cybernetics
.
Yanco, H., & Drury, J., & Sholtz, J., (2004). Beyond
usability evaluation: Analysis of human-robot
interaction at a major robotics competition.
Human-
Computer Interaction
, vol. 19, 117-149.
ICINCO 2005 - ROBOTICS AND AUTOMATION
282
