
PEDESTRIAN RECOGNITION FOR INTELLIGENT
TRANSPORTATION SYSTEMS
D. Fern
´
andez, I. Parra, M. A. Sotelo, L. M. Bergasa, P. Revenga, J. Nuevo, M. Oca
˜
na
Department of Electronics. University of Alcal
´
a
Alcal
´
a de Henares, Madrid, Spain
Keywords:
Pedestrian Recognition, Support Vector Machines, Stereovision, Intelligent Transportation Systems.
Abstract:
This paper describes a binocular vision-based pedestrian recognition System. The basic components of pedes-
trians are first located in the image and then combined with a SVM-based classifier. This poses the problem of
pedestrian detection and recognition in real, cluttered road images. Candidate pedestrians are located using a
subtractive clustering attention mechanism. A distributed learning approach is proposed in order to better deal
with pedestrians variability, illumination conditions, partial occlusions and rotations. The performance of the
pedestrian recognition system is enhanced by a multiframe validation process. By doing so, the detection rate
is largely increased. A database containing hundreds of pedestrian examples extracted from real traffic images
has been created for learning purposes. We present and discuss the results achieved up to date.
1 INTRODUCTION
This paper describes a binocular vision-based pedes-
trian recognition system in the framework of Intelli-
gent Transportation Systems (ITS) technologies. In
our approach, the basic components of pedestrians
are first located in the image and then combined with
a SVM-based classifier. The challenge is to use a
couple of FireWire digital cameras as input, in or-
der to achieve a low cost final solution that meets
the requirements needed to undertake serial produc-
tion. The digital cameras provide range measure-
ments using the laws of stereo vision. Some pre-
vious works use available sensing methods such as
laserscanner (Fuerstenberg et al., 2002), stereovision
(Gavrila et al., 2004) (Grubb et al., 2004), or a com-
bination of both (Labayrade et al., 2003). Only a
few works deal with the problem of monocular pedes-
trian recognition using pattern recognition techniques
(Shashua et al., 2004). Pedestrian recognition is a
challenging problem in real traffic, cluttered environ-
ments. This is a complex problem as long as it re-
quires that the object class exhibits high interclass
and low intraclass variability. In addition, pedestrian
recognition should perform robustly under variable il-
lumination conditions, variable rotated positions, and
even if some of the pedestrian parts or limbs are par-
tially occluded.
Object recognition techniques can be classified into
three major categories, as described in (Mohan et al.,
2001). The first category is represented by model-
based systems in which a model is defined for the
object of interest and the system attempts to match
the model to different parts of the image in order
to find a fit. Unfortunately, pedestrians can be re-
garded as quite a variable class that makes it impos-
sible to define a model that represents the class in an
accurate, general way. In consequence, model-based
systems are of little use for pedestrians recognition
purposes. The second category are image invariance
methods which perform a matching based on a set of
image pattern features that, supposedly, uniquely de-
termine the object being searched for. Pedestrians do
not exhibit any deterministic image pattern relation-
ships because of its large variability (size, pose and
so forth). For this reason, image invariance methods
are not a viable option in order to solve the pedestrian
recognition problem. The third category of object de-
tection techniques is characterised by example-based
learning algorithms. The salient features of a class
are learnt by the system based on a set of examples.
This type of technique can provide a solution to the
pedestrian recognition problem as long as the follow-
ing conditions are met.
• A sufficiently large number of pedestrians exam-
ples are contained in the database.
292
Fernández D., Parra I., A. Sotelo M., M. Bergasa L., Revenga P., Nuevo J. and Ocaña M. (2005).
PEDESTRIAN RECOGNITION FOR INTELLIGENT TRANSPORTATION SYSTEMS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 292-297
DOI: 10.5220/0001179702920297
Copyright
c
SciTePress

• The examples are representative of the pedestrian
class in terms of variability, illumination condi-
tions, position and size in the image.
Example-based techniques have been previously
used in natural, cluttered environments for pedestrian
detection (Shashua et al., 2004) (Gavrila et al., 2004).
In general, these techniques are easy to use with ob-
jects composed of distinct identifiable parts arranged
in a well-defined configuration. A distributed learn-
ing approach based on components (Mohan et al.,
2001) is more efficient for object recognition in real
cluttered environments than holistic approaches (Pa-
pageorgiou and Poggio, 2000). Distributed learning
techniques can deal with partial occlusions and are
less sensitive to object rotations. However, in spite
of their ability to detect objects in real images, we
propose to reduce the pedestrians searching space in
an intelligent manner, based on the road image, so
as to increase the performance of the detection mod-
ule. Accordingly, road lane markings are detected and
used as the guidelines that drive the pedestrian search-
ing process. The area contained by the limits of the
lanes determines the zone of the real 3D scene where
pedestrians are searched for. The objects found in the
searching area are passed on to the pedestrian recog-
nition module. This helps reduce the rate of false pos-
itive detections. In case that no lane markings are de-
tected, a basic area of interest is used instead covering
the front part ahead of the ego-vehicle. The descrip-
tion of the lane marking detection system is provided
in (Sotelo et al., 2005). The rest of the paper is or-
ganised as follows: section II provides a description
of the candidate selection mechanism. Section III de-
scribes the pedestrian recognition system. The results
achieved up to date are presented in section IV. Fi-
nally, section V summarizes the conclusions and fu-
ture work.
2 CANDIDATE SELECTION
We have developed a calibrated stereo platform and
calculated the intrinsic parameters for each camera,
and the extrinsic parameters between them, in order
to obtain the fundamental matrix that defines the sys-
tem epipolar geometry. This way the perfect phys-
ically aligning between cameras that implies the as-
sumption of parallel epipolar lines, is not necessary,
because the stereo calibration process defines mathe-
matically the geometric relationships for the cameras
(Xu and Zhang, 1996).
The first task is image preprocessing which has two
steps: normalize intensity values, to correct for dif-
ferences between the two images, and eliminate ra-
dial and tangential distortion. Once here, we apply a
Canny algorithm for feature extraction on the left im-
age. The Canny image provides a good representation
of the discriminating features of pedestrians, as de-
picts Figure 1. Features such as heads, arms and legs
are visible and distinguishable and are not affected
by colours or intensity. It gives us some indications
about discriminating zones for the pedestrian recog-
nition system.
Figure 1: Some Canny images examples. Upper row:
pedestrians examples. Bottom row: non pedestrians exam-
ples
In order to extract 3D scene information some au-
thors use disparity map techniques combined with
the v-disparity segmentation (Grubb et al., 2004)
(Labayrade et al., 2003). This option was discarded
because of the disadvantages associated with disparity
computation algorithms: prior to disparity map gener-
ation the image pair has to be rectified to ensure good
correspondence matching. In addition the informa-
tion for performing generic obstacles detection is de-
fined with a vertical line into the v-disparity image.
This implies managing very little information to de-
tect obstacles, which works for big object detection
as vehicles, but could not be enough for smaller ob-
ject detection such as pedestrians. After solving the
correspondence problem, our approach creates a 3D
points map which origin is placed at the left camera.
Using the fundamental matrix for each Canny’s de-
tected point we search the corresponding point in the
other image along its epipolar line (fixing the maxi-
mum distance between corresponding points in order
to reduce the cost of matching).
The correspondence problem can be solved using
a wide spectrum of matching techniques. But most
recent successes have been in area-based algorithms.
Specifically the Zero Mean Normalized Cross Corre-
lation has performed most robustly (Boufama, 1994).
This algorithm seeks -for a point given on the left
image- the larger correlation response for a point of
the right image, taking into account the relevance of
the window size. As the window size decreases, the
discriminatory power of the area-based criterion is de-
creased and some local maximum in ZMNCC could
have been found in the search regions. Moreover, con-
tinually increasing the window size causes the perfor-
PEDESTRIAN RECOGNITION FOR INTELLIGENT TRANSPORTATION SYSTEMS
293

mance to degrade because of occlusion regions and
smoothing of disparity values across depth bound-
aries. In consequence the correspondences are often
not correct.
According to the previous statements we need a fil-
tering criteria in order to reject outliers. We create
a XZ map (bird’s eye map) and first, we extract 3D
points within the pedestrian searching area (after the
road lanes marking detecting system). Second, road
surface points (road drawings) and high points, above
2m, are removed. And finally we filter the XZ map
according to a neighbourhood criterion. Figure 2 de-
picts the filtering criteria.
Figure 2: Filtering criteria and XZ maps.
As we can see in Figure 3, the appearance of pedes-
trians in 3D space is represented by an uniformly dis-
tributed set of points. Data clustering techniques is
concerned with the partitioning of a data set into sev-
eral groups such that the similarity within a group
is larger than that among groups. The common ap-
proach of clustering techniques is to find clusters cen-
ters that will represent each cluster and normally the
number of clusters is known beforehand. This is the
case of K-means based algorithms. In our case the
number of clusters is unknown, outlier effects have to
be reduced or completely eliminated and it is necce-
sary to define specific space characteristics in order to
group different pedestrians in the scene. For these rea-
sons we use the Subtractive Clustering (Chiu, 1994)
that is applied in Fuzzy Model Identification Systems
and is based on a measure of the density of data
points. The idea is to find regions in the feature space
with high densities of data points. The point with the
highest number of neighbours is selected as centre for
a cluster. The data points within a prespecified neigh-
borhood radius are then removed (subtracted), and the
algorithm looks for a new point with the highest num-
ber of neighbours.
We carry out this algorithm using a 3-dimensional
neighbourhood radius r
a
= (r
ax
, r
ay
, r
az
). Since
each data point is a candidate for a cluster centre, a
density measure at data point µ
k
= (x
k
, y
k
, z
k
) is de-
Figure 3: Left: 2D points into left image. Right: 3D points
location.
fined as
D
k
=
K
X
j=1
exp
−
||µ
k
− µ
j
||
(r
a
/2)
2
(1)
Let µ
C
be the point with highest density and D
C
its
density measure. Next, the density measure for each
point µ
k
is revised by the formula
D
′
k
= D
k
− D
C
exp
−
||µ
k
− µ
C
||
(r
b
/2)
2
(2)
where r
b
defines a neighbourhood to be reduced in
density measure and it is normally larger than r
a
to prevent closely spaced cluster centres, typically
r
b
= 1.5r
a
= (1.5r
ax
, 1.5r
ay
, 1.5r
az
).After the den-
sity measure for each point is revised, the next clus-
ter centre is selected and all the density measures are
revised again. The process is repeated until a suffi-
cient number of cluster centres are generated. After
applying subtractive clustering to a set of input data,
each cluster represents a candidate. Pedestrian classi-
fication will be done in 2D in the ROI defined by the
image projection of the 3D candidate regions. Figure
4 depicts the multicandidate regions of interest gen-
erated by the clustering mechanism in a sequence of
images. Nonetheless, this figure is bound to change
depending on traffic conditions.
3 PEDESTRIAN RECOGNITION
The appearance of pedestrians in the scene presents a
wide variability (moving longitudinally, moving later-
ally, stationary, etc. ). In consequence, it makes sense
to use a distributed learning approach in which each
pedestrian body part is independently learnt by a spe-
cialized classifier in a first learning stage. The body
local parts are then integrated by another classifier in a
ICINCO 2005 - ROBOTICS AND AUTOMATION
294

Figure 4: Generation of candidate regions of interest in a
sequence of images.
second learning stage. The proposed approach can be
regarded as a hierarchical one. By using independent
classifiers in a distributed manner the learning process
is simplified, as long as a single classifier has to learn
individual features of local regions in certain condi-
tions. Otherwise, it would be difficult to attain an ac-
ceptable result using a holistic approach. We have
considered a total of 6 different sub-regions for each
candidate region of interest which has been fit to a size
of 24×72 pixels. The first sub-region is located in the
head. The arms and legs are covered between the sec-
ond and fifth regions. In addition we define a region
located between the legs, covering an area with rel-
evant information depending on the pedestrian pose.
The locations of the six-regions have been chosen in
an attempt to detect coherent pedestrian features as
depicted in figure 5.
Figure 5: Left: composition of a candidate region of inter-
est into 6 sub-regions. Right: examples in a sequence of
images.
A set of features must be extracted from each sub-
region and fed to the classifier. These are expected
to be invariant to local shifts of candidate region of
interest caused by change of pose and articulation
of the pedestrian’s arms and limbs. Several features
extractors have been proved: co-occurrence matrix
over canny edge extraction and over 32 levels normal-
ized image, normalized orientation histogram over the
128 levels normalized image, image gradient magni-
tudes and orientation and finally texture unit num-
ber (NTU). The co-occurrences matrices over canny
edge extraction are computed by the accumulated ad-
dition of the 4 possible bits combinations on the im-
age (00, 01, 10, 11) and yield one 2 × 2 matrix for
each direction. As we have choosed 4 orientations
(90
◦
, 45
◦
, 0
◦
, 315
◦
) we get 4 matrices per sub-region
and therefore a 16-element vector. When we compute
the co-occurrence over the normalized image instead
dealing with the cany edge extraction, the image has
been normalized to 32 levels so that the co-occurrence
matrices are not too large. By doing this we get 4
32 × 32 matrices per sub-region which seems a much
more reasonable size. The normalized orientation his-
togram adds the difference magnitude between pix-
els in the 4 orientations delivering, this way, 4 128-
lengthed vectors per sub region. Image gradient mag-
nitudes and orientation have been directly fed to the
classifier and their size depends on the sub-region’s
one. Finally, NTU extracts the local texture informa-
tion of a neighbourhood of pixels (Wang, 1990) and
the vectors size also depends on the sub-region size.
The Support Vector Machines (SVM) classifier,
proposed by (Vapnik, 1999) have yielded excellent
results in various data classification tasks, including
people detection (Papageorgiou and Poggio, 2000).
The SVM algorithm uses structural risk minimization
to find the hyperplane that optimally separates two
classes of objects. We use it in order to classify each
candidate as either pedestrian or non-pedestrian. The
global training strategy is carried out in two stages.
In a first stage, separate SVM-based classifiers are
trained using individual training sets that represent a
subset of a sub-region. Each SVM classifier produces
an output between -1 (non-pedestrian) and +1 (pedes-
trian). Accordingly, it can be stated that this stage
provides classification of individual parts of the can-
didate sub-regions. In a second step, the outputs of
all classifiers are merged in a simple classifier which
makes a decision based on a majority criterion in or-
der to provide the final classification result. Once
here, each candidate classified as pedestrian is dy-
namically tracked by a Kalman filter which decreases
the false negative rate.
4 RESULTS
The system was implemented on a Pentium IV at 2.4
Ghz running the Knoppix Linux Operating System.
With 320×240 pixel images resolution, the complete
algorithm runs at an average rate of 20 frames/s de-
pending on the number of pedestrian being tracked
PEDESTRIAN RECOGNITION FOR INTELLIGENT TRANSPORTATION SYSTEMS
295
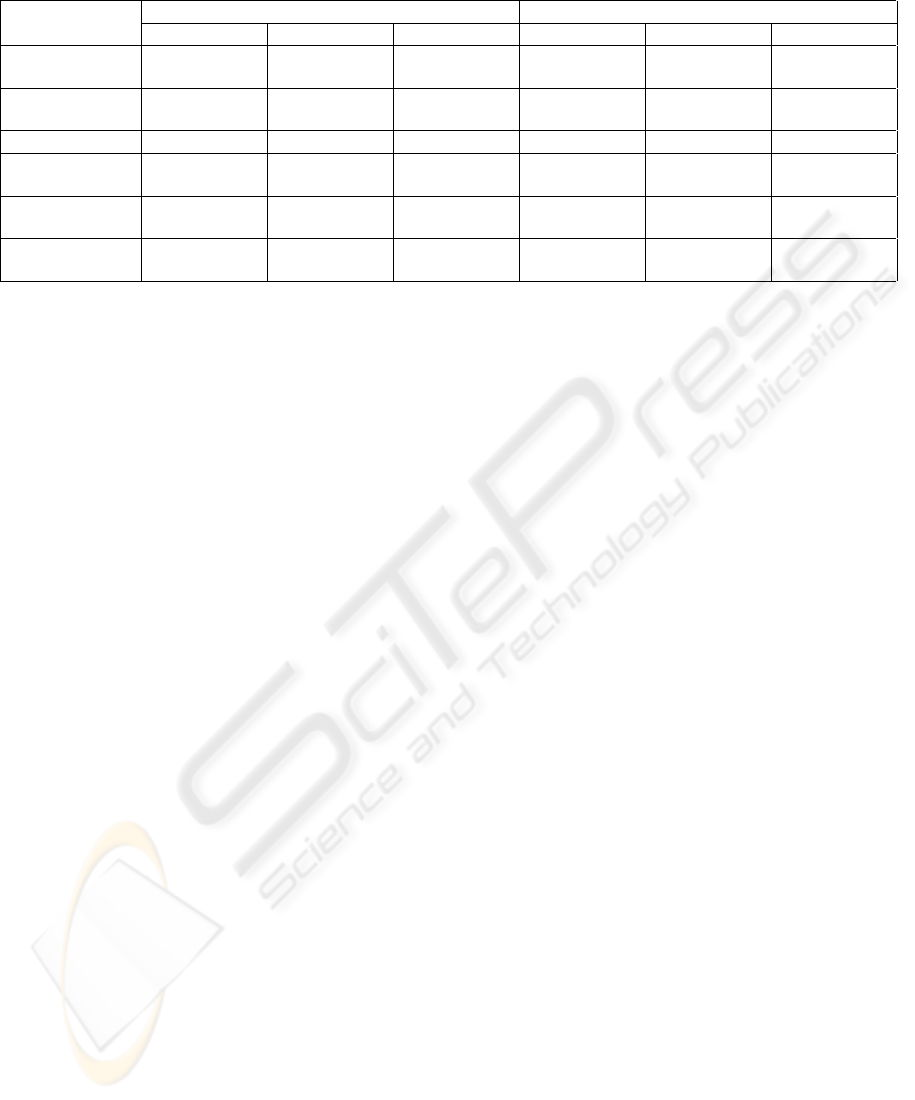
Table 1: SVM classification results.
Distributed SVM Classifier Holistic SVM Classifier
detection rate false positive rate false negative rate detection rate false positive rate false negative rate
Coocurrence over
normalized image
0.7437 0 0.2563 0.7789 0 0.2211
Coocurrence over
canny image
0.8643 0 0.1357 0.8593 0.0653 0.0754
Canny image 0.7940 0 0.2060 0.7236 0 0.2764
Magnitude orienta-
tion
0.7236 0 0.2764 0.7136 0 0.2864
Normalizad Orien-
tation Histogram
0.9246 0 0.0754 0.8894 0.0402 0.0704
Texture Unit Num-
ber
0.8593 0 0.1407 0.7136 0 0.2864
and their position. Specifically the average rate have a
strong dependency on the number of correlated points
because of the correlation computacional cost, which
consumes 80% of the whole processing time.
The candidate selection system has proved to be
robust in various illumination conditions, different
scenes and distances up to 25m, developing a prac-
tical false-negative rate of 0%, after the kalman filter-
ing. Once the selection of pedestrians as candidates
is granted the false-positive rate is expected to be cor-
rected by the SVM classifier.
We created a database containing 1000 samples
of pedestrians and non-pedestrian in different situa-
tions. The number of pedestrians samples in the train-
ing sets was chosen to be similar to the number of
non-pedestrian samples. These ones were extracted
from recorded images acquired in real experiments
onboard a road vehicle under real traffic conditions.
All training sets were created at day time conditions
using the TSetBuilder tool (Nuevo, 2005), specifically
developed in this project for this purpose. By us-
ing the TSetBuilder tool different candidate regions
are manually selected in the image on a frame-by-
frame basis.Special attention was given to the selec-
tion of non-pedestrian samples. If we select simple
non-pedestrian examples (for instance, road regions)
the system learns very quickly but it does not develop
enough discriminating capability in practice, as the
attention mechanism can select a region of the image
that might be very similar to a pedestrian but it is not
a pedestrian in reality. The training of all SVM clas-
sifiers was performed using the free-licence LibTorch
libraries for Linux. We obtained different detection
rates depending on the feature extractor as depicted in
Table 1 in a test set containing 500 images. The per-
formance of the single-frame recognition process is
largely increased by using multiframe validation. The
probability of a candidate region being classified as
pedestrian is modelled as a Bayesian random variable.
Accordingly, its value is recomputed at each frame as
a function of the outputs provided by the single-frame
classifier and by a Kalman filter used for pedestrian
tracking. Figure 6 shows an example of pedestrian
detection and tracking.
5 CONCLUSION
We have developed a binocular multi-frame pedes-
trian classification system based on Support Vector
Machines (SVM). The learning process has been sim-
plified by decomposing the candidate regions into 6
local sub-regions that are easily learned by individual
SVM classifiers. The complete classifier can be re-
garded as a hierarchical one. The distributed approach
has yielded, superior performance, over the same data
set,compared to the holistic classifier version. The re-
sults achieved up to date with a set of 1000 samples
are encouraging. Nevertheless they still need to be
improved before being safely used as an assistance
driving system onboard road vehicles in real traffic
conditions. For this purpose, the content of the train-
ing sets will be largely increased by including new
and more complex samples that will boost the classi-
fier performance, in particular when dealing with dif-
ficult cases. We aim at enhancing the classifier abil-
ity to discriminate those cases by incorporating thou-
sands of them in the database. In addition, the at-
tention mechanism will be refined in order to provide
more candidates around the original candidate region.
This will reduce the number of candidate regions that
only contain a part of a pedestrian, i.e., those cases
in which the entire pedestrian is not completely vis-
ible in the candidate region due to a misdetection of
the attention mechanism. Finally, a gait recognition
process will be introduced in order to enhance the
shape-based pedestrian detection algorithm.
ICINCO 2005 - ROBOTICS AND AUTOMATION
296

Figure 6: Pedestrian detection and tracking in a sequence of images.
ACKNOWLEDGMENT
This work has been funded by Research Projects
CICYT DPI2002-04064-05-04 and FOM2002-002
(Ministerio de Fomento, Spain).
REFERENCES
Boufama, B. (1994). Reconstruction tridimensionnelle en
vision par ordinateur: Cas des cameras non etalon-
nees. In PhD thesis. Institut National Polytechnique
de Grenoble, France.
Chiu, S. (1994). Fuzzy model identification based on cluster
estimation. In J. of Intelligent and Fuzzy Systems. vol.
2, no. 3, pp. 267-278, 1994.
Fuerstenberg, K. C., Dietmayer, K. J., and Willhoeft,
V. (2002). Pedestrian recognition in urban traffic
using a vehicle based multilayer laserscanner. In
In Proc. IEEE Intelligent Vehicles Symposium. Ver-
sailles, France, June 2002.
Gavrila, D. M., Giebel, J., and Munder, S. (2004). Vision-
based pedestrian detection: The protector system. In
In Proc. IEEE Intelligent Vehicles Symposium. pp. 13-
18, Parma, Italy, June 14-17.
Grubb, G., Zelinsky, A., Nilsson, L., and Rilbe, M. (2004).
3d vision sensing for improved pedestrian safety. In
In Proc. IEEE Intelligent Vehicles Symposium. pp. 19-
24, Parma, Italy.
Labayrade, R., Royere, C., Gruyer, D., and Aubert (2003).
Cooperative fusion for multi-obstacles detection with
use of stereovision and laser scanner. In International
Conference on Advanced Robotics. pp. 1538-1543.
Mohan, A., Papageorgiou, C., and Poggio, T. (2001).
Example-based object detection in images by compo-
nents. In IEEE Transactions on Pattern Analisis and
Machine Intelligence. Vol. 23 No. 4.
Nuevo, J. (2005). Testbuilder tutorial. technical report 2005.
ftp://www.depeca.uah.es/pub/vision/SVM/manual.pdf.
Papageorgiou, C. and Poggio, T. (2000). A trainable system
for object detection. In Intl J. Computer Vision. Vol.
38, No. 1, pp. 15-33.
Shashua, A., Gdalyahu, Y., and Hayun, G. (2004). Pedes-
trian detection for driving assistance systems: single-
frame classification and system level performance. In
In Proc. IEEE Intelligent Vehicles Symposium. pp. 1-
6, Parma, Italy.
Sotelo, M. A., Nuevo, J., Bergasa, L. M., and Ocana, M.
(2005). Road vehicle recognition in monocular im-
ages. In submitted to ISIE 2005. Duvrobnik, Croatia
June 2005.
Vapnik, V. (1999). The nature of statistical learning theory.
Springer Verlag.
Wang, L. (1990). Texture unit, texture spectrum and texture
analysis. In IEEE Transactions on Geosciences and
Remote Sensing. Vol. 28, No 4, pp. 509-512 (90-19).
Xu, G. and Zhang, Z. (1996). Epipolar Geometry in
Stereo, Motion and Object Recognition: A Unified
Approach. Kluwer Academic Publishers, Dordrecht,
Boston, London, 1st edition.
PEDESTRIAN RECOGNITION FOR INTELLIGENT TRANSPORTATION SYSTEMS
297
