
RECONFIGURABLE INTERACTIVITY OF PET-TYPE ROBOT
REHABILITATION SYSTEM
Toshiyuki Maeda
Department of Management Information, Hannan University
5-4-33, Amamihigashi, Matsubara, Osaka, 580-8502 JAPAN
Keywords:
Reconfigurable Interactivity, Pet-type Robot, Rehabilitation Engineering, Human Computer Interaction.
Abstract:
This paper addresses a pet-type robot rehabilitation system for aged people. The robot offers interactivity,
which can communicate autonomously and communicate with others using Internet-connectivity, for being a
partner. To avoid being satiated with conversation, we propose reconfigurable interactivity, especially focused
conversation contents. In order to watch over aged people through the Net, we have furthermore developed
auto-detection alert system for aged people by checking user logs, which is also reconfigurable.
1 INTRODUCTION
Recently, the rate of aged people is getting higher and
higher and, in accordance with that, welfare facilities
and tools using advanced technologies have been de-
veloped(Bolmsj et al., 1995; Clarkson et al., 2003).
Many of them are, however, for aiding persons with
manipulation disabilities, or for supporting physical
works of carers and aged people, but for mental activ-
ities. Especially in Japan, single-resident aged peo-
ple tend to be isolated with local communities, and
that may lead loneliness of those. Thus it is very im-
portant to communicate those aged people with oth-
ers on mental aspect. Pet-type robot system is one
important candidate to solve those sorts of humane
problems, and there have already been several re-
searches(Matsukawa et al., 1996; Maeda et al., 2002;
Ohkawa et al., 1998; Maeda et al., 2003), though they
are not focused enough to single resident aged peo-
ple. We here introduce a new pet-type rehabilitation
robot system which consists of pet-type robots and
the information center. Pet-type robots can treat as
an autonomous pseudo-pet, which can talk to user(s),
give information of the local communities, and watch
over them and send some information to carers at the
information center if needed. To avoid satiating with
fixed conversations, we propose reconfigurability of
the conversation contents which compensates limited
storage space for conversation contents. The system
measures satiation of user(s) in various ways.
In this paper we explain some concept and features
of our system, and later we discuss some examina-
tion. We here have demonstrated and examined some
features of this robot system for aged people, using
some of the robots, and certified some effects of our
system.
2 CONCEPT OF PET-TYPE
ROBOT SYSTEM
Figure 1 shows the basic concept of our system. The
robot should treat as an information terminal as well
as a virtual pet for aged peoples. For realizing those
requirements, the robot is net-accessible and that fea-
ture allows the people to communicate not only with
carers, but also with relatives, acquaintances, and so
on. That is quite important for aged people, especially
self-resident, not to feel alone.
The robot has some functions, such as:
• Autonomous communication (conversation with
user(s)),
• Voice mail via information center(s),
• Voice BBS (bulletin board system) on the informa-
tion center,
• Telephone call with photo attachment,
• Image delivery for watching over, etc.
As described above, communication is very impor-
tant for our system, and so we discuss those functions
in details, in the following sections.
257
Maeda T. (2005).
RECONFIGURABLE INTERACTIVITY OF PET-TYPE ROBOT REHABILITATION SYSTEM.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 257-262
DOI: 10.5220/0001177702570262
Copyright
c
SciTePress
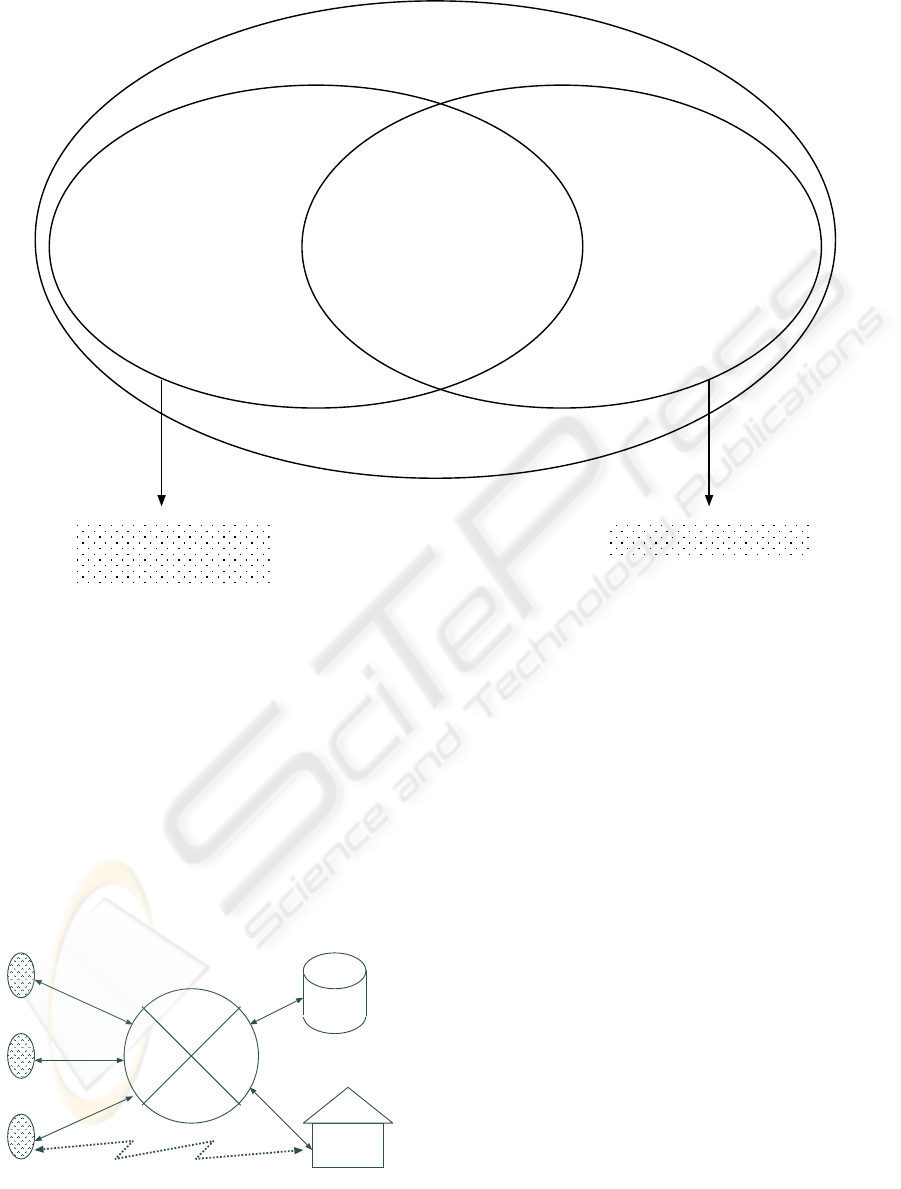
Relievability & Reliability
Interface for
aged people
Mental care
Conversation
Button
Communication
Information Interchange
announce
Conversation robot
type terminal
Network accesibility
Pet-type
Information terminal
Figure 1: System concept.
3 COMMUNICATION
ARCHITECTURE
Figure 2 shows the network diagram of our system.
All robots, or terminals, are connected to Internet,
which means the robots are regarded as Internet-
accessible terminals. Furthermore, those treat a tele-
phone if required. In the following subsections, these
functions are described.
pet1
pet2
pet3
Internet
Information Center
family/friend/...
(mobile) phonecall
Figure 2: System network diagram.
3.1 Communication for surveillance
Each robot has a CCD camera to watch over user(s).
Images can be taken by the camera, and are sent to the
information center via Internet, which is connected
by a mobile phone. Then carers can get informations
easily for surveillance. If the user requires, the ro-
bot sends images in regular intervals, and that offers
some of continual watching, which means a sort of
lifeguard. That means, for instance, when the same
images are sent for a certain period, the carers can
get a situation such as the user may have some trou-
ble (e.g. a sudden heart attack) and then go there to
rescue.
3.2 Multi-modal interface
Speech techniques are, furthermore, used to some in-
formation exchange with the robot. That speech oper-
ation makes those people feel naturally and friendlily,
and then improves usability much.
The current robot system supports the following in-
vocation of communication;
• “Telephone button ON!”: by this speech command,
a user can take a telephone call, or catch a call.
ICINCO 2005 - ROBOTICS AND AUTOMATION
258

• “Tell!”: supports voice mails. At that time, a
user can choose “(normal) mails”, or “special (mes-
sages)”.
• “Bulletin board!”: opens voice BBS. In the situa-
tion, a user can designate “Answer” for followup
of others’ message, or “Question” for invocation of
new a thread (theme or topic) in the BBS.
Those are mainly for communication with others
through Internet and/or telephone networks, which
helps user(s) to communicate with relatives and
friends easily, as there are still some amount of peo-
ple, especially aged people, who are not Internet-
accessible.
3.3 Autonomous conversation
Besides networking communication, autonomous
communication is strongly required for self-resident
aged people, as the pet robot can be a partner and then
that may avoid the user from loneliness.
Autonomous communication consists of speech
recognition and speech generation. Speech media for
operations are very useful for aged people, who are
not accustomed to use computers straightforwardly.
The current version of robots can tell the user his
name, current date/time. The robot can use around
200 Japanese words, including (translated in English);
• “Good morning!”,
• “Wake up!”,
• “Bye Bye”, and so on.
If a user talk to the robot “Wake up!”, the the ro-
bot talks the greeting back to the user, and gives one
arbitrary health advice at random, which give user(s)
some feelings of “live creature”. Furthermore, for the
purpose of getting friendly, the robot can sing several
short songs.
Note that those speech is not synthesized but just
composed from parts of speech pieces, which were
previously recorded and edited from human speech.
This composed method found to be more natural to
listen to, and that leads quite important characteristics
for aged people to be easy to communicate rather than
synthesized ones.
4 HARDWARE FEATURES
4.1 Robot structure
To reinforce interactivity, including communication
with user(s), more naturally and friendlily, the robot
has some sensors and motors.
Figure 3 shows a skeleton of the robot.
Figure 3: The robot skeleton.
Those components enable the robot to behave
much more like a real (living) pet, which afford to be
more friendly and easy to contact (Gibson and Walk,
1960).
Sensors work for catching some signals of friendli-
ness, which makes the robot cheer up / down, as well
as for interrupting its action, speech, etc.
Considering necessity and sufficiency, the robot
has four motors; one for both ears, one for both eyes,
one for the nose, and one for the neck. Motions gener-
ates by those motors symbolize emotions of the robot,
which is essential for our object. For instance, the
head, followed by neck, can move vertically, which
imply the emotion of bowing, and horizontally, which
imply negation, or “No, not at all.”.
Figure 4 denotes motions of the robot.
4.2 System structure
Figure 5 shows one of our prototype robots.
At the moment the robot consists of two units,
stuffed toy unit and control unit, and those two are
connected by a serial line. the toy (doll) part has mo-
tors and sensors, and motion commands and sensed
signals are sent to the control unit.
To afford user(s) to use easily, or pleasantly, several
components are set as follows;
• A camera is embedded into a toy camera.
• Microphones are set at both ears.
• A speaker is set just under the mouth.
We at the moment use a laptop computer for the
control unit, and the control system (softwares) is pro-
grammed on Linux.
To and from the information center, communica-
tion, or information interchange is done through the
Internet, with TCP/IP protocol of course. Telephone
RECONFIGURABLE INTERACTIVITY OF PET-TYPE ROBOT REHABILITATION SYSTEM
259

Figure 4: The robot motion.
calls are not to use VoIP protocol, but done using fa-
cility of (stand-alone) PHS, through public telephone
network.
5 RECONFIGURABILITY OF
INTERACTION
5.1 Interface Usability
Pet-type robots should satisfy following requirements
with view of aged people’s usability:
1. They should not give a feeling of machines, or elec-
tronic equipments. For aged people, those “Hard”
equipments are very tough to touch, and that leads
not to use frequently.
2. They should be able to give some conversation with
contact and/or speech, that let user(s) be kind, or
easy to communicate.
3. They should not force user(s) to use.
Figure 5: The prototype robot.
To solve above problems, we install the following
features:
1. We designed a robot body as a stuffed toy bear.
That enables the robot to be more emotional, which
is essential for pet-type robots(Fujita, 1999).
2. We have developed speech input (recognition) and
speech output (synthesis or conjunction), and other
multi-modal interface for conversation (explained
below). Those techniques realize behavior of pets,
and also offer affordance(Gibson and Walk, 1960).
3. We designed user interface as easy and simple as
possible. For instance, a user does not need to op-
erate any mechanical equipment for telecommuni-
cation such as making a telephone call (discussed
below).
5.2 System Reconfiguration
Figure 6 shows a diagram of reconfiguration system.
In each robot, the storage is limited and so we
cannot install enough amount of interactivity proce-
dures at one time, especially for conversation con-
tents. In this paper we focus on conversation inter-
activity, which is essential for our rehabilitation robot
system. When user(s) use the robot more and more,
user(s) may get boring more for that reason. To avoid
ICINCO 2005 - ROBOTICS AND AUTOMATION
260
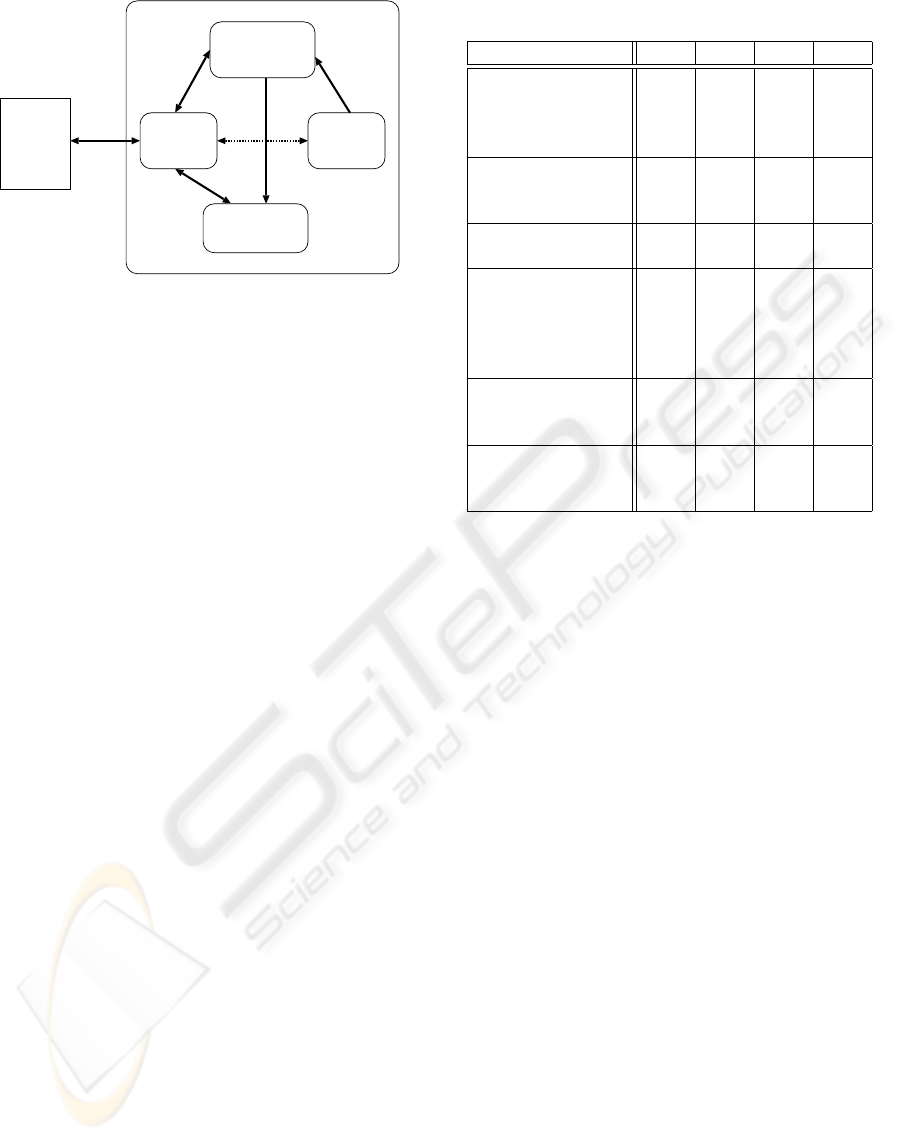
Server
Main Processing Unit
ContentsNet-Comm
Unit
Logger/Log checker
logging
Direction
communication
exchange
Client (Pet-type robot)
Figure 6: Reconfiguration diagram.
satiating with robot interaction, we propose reconfig-
urability of Interactivity.
The system measures satiation of user(s) in various
ways;
1. The system analyzes the usual usage of the user by
active usage time at the first time, and
2. the system checks the logs where which contents
are selected more often, and
3. if some of them are selected over a certain thresh-
old value, or one of other ad-hoc rules matches, a
trigger event occurs.
Ad-hoc rules are, for instance, “If a sentence was
invoked frequently at past, and are not used recently,
then the sentence may be boring to the user”, and so
on. With that trigger, the system reinstalls the con-
tents through the net from the server. For instance, if
a user often ask the robot to sing a song, contents of
songs are limited (at the current system only 10 songs
are involved) and the robot system exchanges songs if
all songs are sung three times at the current configu-
ration.
6 AUTO-DETECTION ALERT
SYSTEM
In order to watch over aged people apart from their
residences, automatic alert system is a very useful
function. The server has logs of usage history of each
user(s), and so system can check the frequency of the
pet-type robot. The system watches logs continually
and the alert is generated when the user has not use
the robot during a certain period, 24 hours at the cur-
rent configuration.
Table 1: Questionnaire results (%)
Q V G N B
How frequently
do you think the
robot understand
you?
33.3 33.3 14.3 19.1
Do you feel the
design of the ro-
bot is good?
31.3 62.5 6.2 0
Does the robot
speak well?
33.5 43.8 22.7 0
How do you feel
by listening to
the delivered
messages from
the center ?
62.5 31.3 6.3 0
Do you feel
friendliness with
the robot?
57.1 33.3 9.6 0
Do you think you
feel lonely with-
out the robot?
23.1 53.8 15.4 7.7
7 DISCUSSION
We have examined a field test, and targets are 73
single-resident aged people. Each person use the pet-
type robot averagely 62 days, and in that period we
have done 4 interviews and 2 questionnaires.
Table 1 presents questionnaire results, where “Q”
stands for Questions, “V” for “Very good”, “G” for
“Good”, “N” for “Not so good”, and “B” for “Bad”.
It actually shows our system can be used quite well,
though it is not complete. Especially, the item of “un-
derstanding” is not of good point which may cause
from insufficiency of speech recognition, and thus the
function of speech recognition and autonomous con-
versation should be improved.
Table 2 shows statistics of conversation data, de-
rived from log-messages in the center (server). The
system is used approximately each two days, which
seems to be moderate. User(s) turn on the switch
twice a day, which may causes from mail checking
on morning and evening. Conversation time is about
6 minutes, and it may be enough for get and give in-
formation.
For the auto-detection alert system, we focus 60%
of the testers who periodically uses the robot. Dur-
ing the experiment period, alerts occur almost every 6
days, all of which are not serious, or mis-alert. From
questionnaires, even though mis-alerts happen, most
of user(s) feel safe by watching over.
As for the reconfigurability of conversation con-
tents, we have just implemented the modules and not
enough experiments are done yet.
RECONFIGURABLE INTERACTIVITY OF PET-TYPE ROBOT REHABILITATION SYSTEM
261
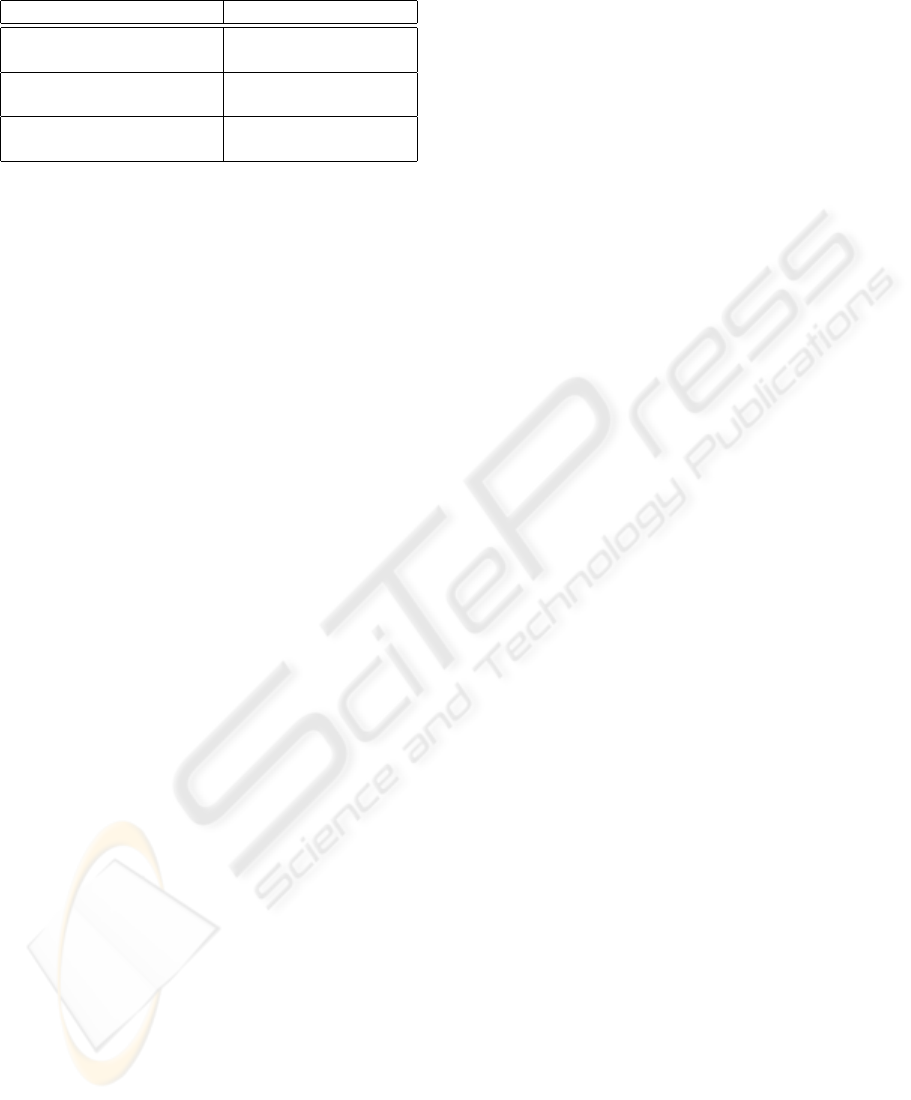
Table 2: Usability statistics.
Item Average
Active rate (actual used
days per monitored days)
53.5%
Power-on frequency (per
day)
2.05 times
Conversation time (per
one conversation)
5 minutes 47 seconds
8 CONCLUDING REMARKS
We developed a pet-type rehabilitation robot system
including the information center, and certify some of
our system’s effect.
We need more field tests for analyzing our system
more precisely, as we have not done enough amount
of examinations. Furthermore the contents, which
consists of conversation sets and speech programs,
should be reconsidered for the more comfortable and
pleasant interaction.
ACKNOWLEDGEMENT
Part of this study is collaborated with Pin Change Co.,
Ltd. This study is also partially supported by Pro-
motion Conference for Industrial Innovation Project
in Welfare of Hiroshima Prefecture, Telecommuni-
cations Advanced Organization of Japan, and Re-
search Grant of Hannan University. For the field test,
we have collaboration with Ikeda-city and Sawayaka
Kousha in Osaka Prefecture in Japan. The authors
greatly appreciate those supports and collaborations.
REFERENCES
Bolmsj, G., Neveryd, H., and Eftring, H. (1995). Robotics
in Rehabilitation. IEEE Transactions on Rehabilita-
tion Engineering, 3:77–83.
Clarkson, J., Coleman, R., Keates, S., and Lebbon, C., ed-
itors (2003). Inclusive Design: Design for the whole
population. Springer-Verlag UK.
Fujita, M. (1999). Emotional Expressions of a Pet-type Ro-
bot. Journal of Robotics Society of Japan, 17(7):947–
951.
Gibson, E. J. and Walk, R. D. (1960). The Visual Cliff.
Scientific American, 202:64–72.
Maeda, T., Yoshida, K., Kayashima, K., and Maeda, Y.
(2002). Mechatronical Features of Net-accessible Pet-
type Robot for Aged People’s Welfare. In Proceedings
of the 3rd China-Japan Symposium on Mechatronics,
pages 212–217.
Maeda, T., Yoshida, K., Niwa, H., Kayashima, K., and
Maeda, Y. (2003). Net-accessive Pet-Type Robot for
Aged People’s Welfare. In Proceedings 2003 IEEE In-
ternational Symposium on Computational Intelligence
in Robotics and Automation (CIRA 2003), pages 130–
133.
Matsukawa, Y., Maekawa, H., Maeda, T., and Kayashima,
K. (1996). A Appearance for affordance of electric
toys. –Implementation–. In Proceedings of The Gen-
eral Conference of The Institute of Electronics, Infor-
mation, and Communication Engineers, volume A–
14, pages A–355.
Ohkawa, K., Shibata, T., and Tanie, K. (1998). A generation
method of evaluation for a robot considering relation
with other robots. Journal of Robotics and Mecha-
tronics, 39(3):284–288.
ICINCO 2005 - ROBOTICS AND AUTOMATION
262
