
SELF-KNOWLEDGE BASED ON THE ATOMIC CAPABILITIES
CONCEPT
A Perspective to Achieve Sure Commitments among Physical Agents
Christian G. Quintero M., Josep Ll. de la Rosa and Josep Vehí
Institute of Informatics and Applications, University of Girona, Girona, Spain
Keywords: Intelligent Control, Cooperative Robotics, Self-aware Control Systems.
Abstract: This paper presents a perspective based on the atomic capabilities concept (AC
2
) to include control-oriented
knowledge in the decision making structure of physical agents (e.g. mobile robots). These agents operate in
a real environment managing physical objects (e.g. their physical bodies) in coordinated tasks. AC
2
guarantees an appropriate agent-oriented representation about the specifications of automatic controllers
installed within the physical agents. This approach allows to each agent a reliable self-knowledge which
concludes in achieving sure commitments and intelligent control in a cooperative system. Examples and
conclusions are presented, emphasising the advantages of our proposal in a coordinated control scenario.
1 INTRODUCTION
Complex control systems are in most cases software-
intensive applications that use advanced software
technologies and have requirements that go well
beyond the knowledge of single disciplines (Sanz et
al, 2003). Currently, some results have been
obtained when control systems are designed using
technologies based on agents and multi-agent
systems (Jennings et al, 2003). However, these
agents lack an appropriate knowledge about physical
aspects of the controlled system. This lack does not
allow them to take the best decisions when these are
requested. Namely, the control-oriented knowledge
is not taken into account in the decision making
structure of the controlled systems managed by
agents. The above knowledge in a controlled system
is directly related to the automatic controllers
specifications established by any control engineer
criteria. Nevertheless, all this embedded information
needs from a suitable representation in
understandable, comparable and computationally
tractable terms that makes easy its management and
improves the multi-agent system performance in a
coordinated control scenario.
Particular cases are the physical agents (e.g.
mobile robots). These agents need a reliable self-
knowledge to avoid a loss of performance in
cooperative decisions when perform coordinated
tasks. This self-knowledge has to be based on an
appropriate awareness about the physical features
(e.g. the dynamics) of their physical bodies, namely,
an agent-oriented representation of their automatic
control architectures.
Along this research line, AC
2
is our proposal
aimed at guaranteeing an appropriate agent-oriented
representation about the specifications of automatic
controllers installed within the physical agents. This
approach provides to each agent a reliable self-
knowledge about the physical features of their
bodies, achieving sure commitments and intelligent
control in a cooperative system.
In particular, AC
2
encapsulates enough control-
oriented information that allows the physical agents
to behave of an intelligent pattern when they acquire
commitments in a coordinated task. Intelligence
understood as the exploitation of this information to
perform better (Sanz et al, 2001) and achieve
enhanced levels of performance and autonomy (Sanz
et al, 2000). This autonomy depends on the level of
achieved consciousness (Sanz et al, 2001). In this
sense, AC
2
contributes to increase this level of
consciousness in the physical agents by means of a
suitable representation of themselves in the world
(Sanz et al, 2002),
since high levels of intelligence
imply not only do learning but also modelling and
representation.
425
G. Quintero M. C., Ll. de la Rosa J. and Vehí J. (2005).
SELF-KNOWLEDGE BASED ON THE ATOMIC CAPABILITIES CONCEPT - A Perspective to Achieve Sure Commitments among Physical Agents.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 425-430
DOI: 10.5220/0001176604250430
Copyright
c
SciTePress

According to (Sanz et al, 2004), the aim of the
self-aware control systems research is to build
systems that exhibit flexible, autonomous, goal-
directed behaviour in response to changes in internal
and external conditions based on a deep
understanding of the world and the self. They will
have integrated control architectures that generate
and exploit world and/or self-awareness to solve
some challenges presented in the modern control
systems (Murray et al, 2003). Hence, how to
introduce in the physical agent the self-knowledge
about its physical features is an important issue to
study and research in the intelligent systems field.
In this paper we show that AC
2
makes possible to
obtain safer systems. These systems respond better
to some undesired events and have a better
coordinated control. Specifically, this paper shows
the influence of AC
2
on the decision making
structure of cooperative intelligent agents when
executing coordinated tasks. In this implementation
the offside manoeuvre in the robotic soccer testbed
is used as coordinated task.
This approach is particularly effective at the
level of automatic control. At this level is necessary
to have a decision making structure about
commitments between physical agents that takes
into account physical features of their physical
bodies. This allows the agents make physically
feasible decisions and to get secure, reachable and
physically grounded commitments.
2 THE ATOMIC CAPABILITIES
CONCEPT (AC
2
)
Physical agents that perform tasks in a multi-agent
environment have to fulfil real time and real world
requirements, such as situated behaviour, goal-
oriented behaviour, efficiency and coordination. The
DPA
2
(Oller et al, 1999) is a proposed layered
architecture that joins the requirements of the control
systems architectures with those of the multi-agent
systems architectures using three principal modules
(control, supervisor and agent) that integrate the
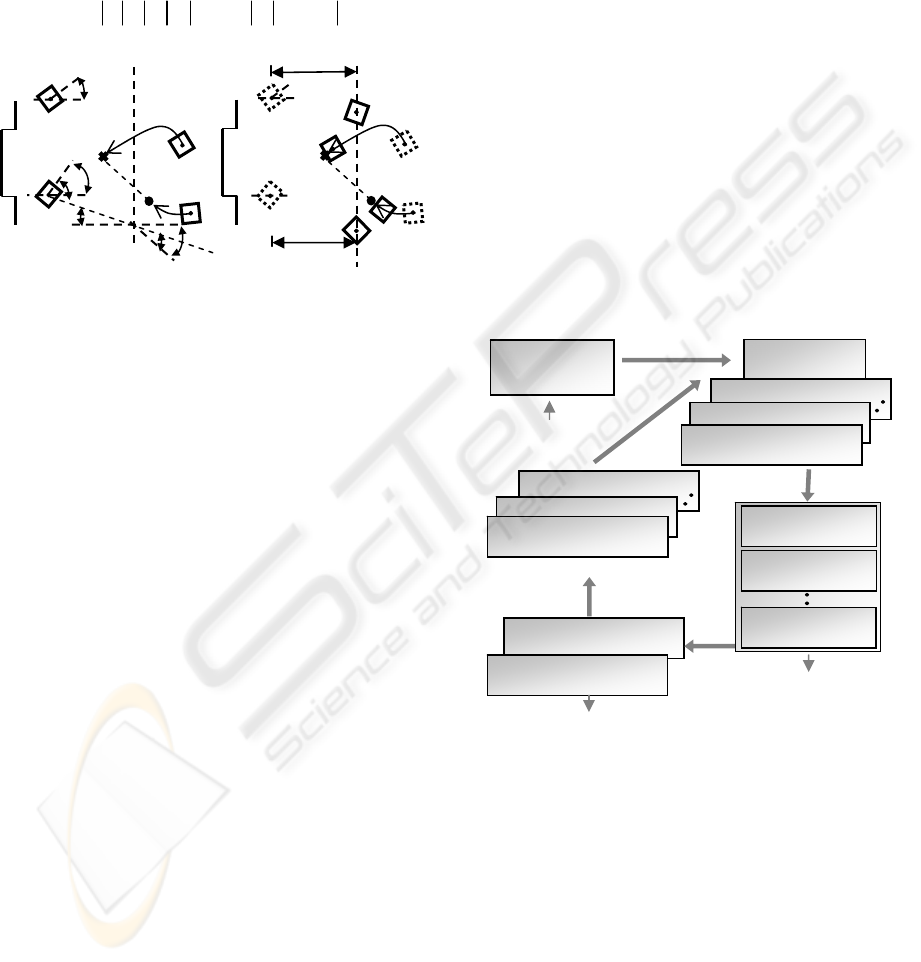
above requirements. Figure 1 shows the different
layers of the architecture and the different
abstraction levels.
Physical agents have to check some external and
internal parameters in order to decide their
behaviours after other agents’ requests in the
commitments acquisition process in coordinated
tasks. The external ones can be obtained by
information interchange with other agents. The
internal ones have to describe the different states of
agents’ physical body, in both low and high
abstraction levels.
Figure 1: DPA
2
Architecture
The following capabilities depending on the
abstraction level of the information were proposed in
(Oller et al, 1999) and (Innocenti et al, 2001), in
order to represent the internal parameters:
Atomic Capabilities: These contain control-
oriented knowledge that describes the specifications
of the controllers of the physical agent. This
knowledge allows increasing the awareness about
the agent’s physical body and the perception of the
environment through this body from a control-
oriented viewpoint. This self-knowledge enhances
the adaptation and learning skills of the physical
agent in the environment.
Basic Capabilities: These contain task-oriented
knowledge that emerges from different combinations
of atomic capabilities sets. This knowledge allows
selecting the most suitable resources (e.g.
controllers) to perform a proposed task according to
the task requirements.
Symbolic Capabilities: These contain role-
oriented knowledge that emerges from different
combinations of basic capabilities sets. This
knowledge allows to perform collective behaviours
among physical agents according to the certainty
indexes related to the execution of the assigned roles
in the commitments acquisition process.
The knowledge represented in these capabilities
gives the physical agent the necessary information to
decide with a high certainty level if its physical body
can perform the requested tasks. Given the evident
relevance of the atomic capabilities as key support
of the DPA
2
architecture (delaRosa et al, 2004),
(Quintero et al, 2004), (Zubelzu et al, 2004),
(Quintero et al, 2005), it is necessary to obtain a
general and enough definition that gathers control-
oriented knowledge in an agent-oriented scenario.
REAL WORLD
MULTI-AGENT WORLD
Sensory
Information
Physical
Changes
Control
Aims
Task
Role
Commitment
degree
Execution
difficulty
AGENT
SUPERVISOR LEVEL
CONTROL LEVEL
BEHAVIOURS-
ACTIONS
ABSTRACTION
DEGREE
ICINCO 2005 - ROBOTICS AND AUTOMATION
426
We have summarized this definition in the atomic
capabilities concept AC
2
.
At a control level, the physical agents can
interact in the world through different controllers
(C
1
, C
2
, C
3
,…, C
N
) with different control algorithms
and different control laws that modify the manner
how their bodies answer in the execution of the
proposed tasks, i.e., the controllers affect the
dynamics of the agents’ physical bodies. This fact
makes necessary the association of each controller C
i
to a set of atomic capabilities AC
i
∀
i = 1… N, that
represents this dynamics when this controller is
utilized. All enclosed information in AC
2
can be
extracted by the agents using introspective reasoning
techniques (delaRosa et al, 2004), (Quintero et al,
2004), (Zubelzu et al, 2004), (Quintero et al, 2005)
and handled using capabilities management
techniques (Quintero et al, 2004), (Quintero et al,
2005).
The set of atomic capabilities used in this paper
has been defined in (Quintero et al, 2005) to be
applied in linear control systems (SISO, MISO,
SIMO and MIMO).
3 AC2 APPLIED TO MOBILE
ROBOTICS
We have used non-holonomic mobile robots to test
our approach using a linearized second-order model
of the robots dynamics. Thus, the movement of each
robot [x(t), y(t),
θ
(t)] is controlled such that the robot
follows the horizontal axis x with a constant linear
velocity v. A control law based on the poles location
method in which the values of the angular velocity
ω
are obtained in terms of the robot position [y(t),
θ
(t)]
is proposed in (1):
Where
2
2,1
1
ζωζωα
−±−=
nn
j ,
α
1,2
are the poles
system, ζ is the damping factor and
ω
n
is the natural
frequency of the characteristic equation of a second-
order system. Thus, the stable linear controlled
system for the movement variables (y,
θ
) of the robot
can be written by using the following Laplace’s
expressions (2) and (3):
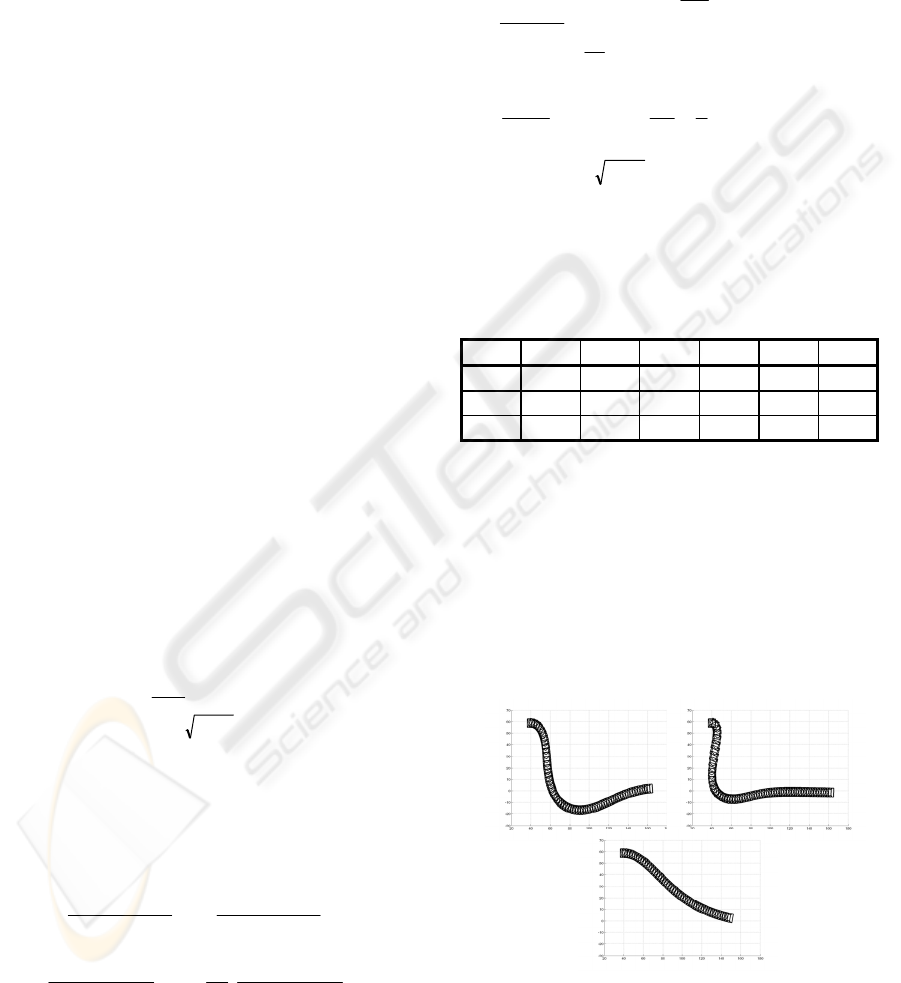
Different dynamics can be designed using the
step responses described in (4) and (5) of the above
linearized model depending on the control engineer
criteria. We have selected the following couples
{ζ,
ω
n
} = {0.4, 6}, {0.6, 10}, {0.8, 4} to design three
movement controllers (C
1
,C
2
and C
3
) that generate
different dynamics as it is shown in the figure 2.
Where
2
1
ζωω
−=
nd
. Some atomic capabilities
using the definitions and constraints described
(Quintero et al, 2005) and the above step responses
were extracted. Table 1 shows the atomic
capabilities associated to each movement controller.
Table 1: Atomic Capabilities of the Used Movement
Controllers
Control
µ
A
(%) σ
A
(%) γ
A
(%) α
A
(%) ε
A
(%) κ
A
C
1
77.83 -42.6 57.54 93.14 81.62 1
C
2
86.25 39.10 59.46 88.93 75.20 1
C
3
87.48 -4.03 57.08 80.30 100 1
4 OUR STUDY CASE
In the proposed task as study case two physical
agents are involved. Defender1 and Defender2 must
coordinate between them to perform an offside
manoeuvre and to avoid the passing a ball between
two opposite physical agents. Figure 3 shows an
example of this task.
Figure 2: Different Dynamics generated with three
different controllers. a). C
1
; b). C
2
; c). C
3
)1()()()()(
21
21
tty
v
t
θαα
αα
ω
++−=
)2()0(
2
)0(
2
2
)(
2222
2
θ
ωζωωζω
ζω
nnnn
n
ss
vs
y
ss
ss
sY
++
+
++
+
=
)3()0(
2
)0(
2
)(
22
2
22
2
y
ss
s
v
ss
s
s
nn
n
nn
ωζω
ω
θ
ωζω
θ
++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
++
=
()
)4(
)(sin
1
)(sin2tansin
)(
1
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
−
−
tut
tutt
e
ty
d
n
yd
n
d
d
d
t
n
n
θ
ζω
ω
ω
ωζ
ζω
ω
ω
ω
ω
()
)5()(sin)(
2
tancos)(
1
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
−
−
tuttut
e
t
ydn
n
d
d
d
t
n
n
ωω
π
ζω
ω
ω
ω
ω
θ
θ
ζω
a
b
c
Initial State
Initial State
Initial State
Final State
Final State
Final State
x(cm)
x(cm)
x(cm)
y(cm)
y(cm)
y(cm)
SELF-KNOWLEDGE BASED ON THE ATOMIC CAPABILITIES CONCEPT - A Perspective to Achieve Sure
Commitments among Physical Agents
427
It is possible to describe the environment state
using the time of the passer to strike the ball
(Time
P
), the distances (D
1
) and (D
2
) between each
defender and the offside line as well as their
respective orientations (
θ
1
and
θ
2
). In order to use a
more generic value, the orientation of the defenders
is described in (6).
Figure 3: Offside Scheme. a). before, b). after
Besides, different situations can appear in order
to execute the same coordinated task in a multi-
agent environment. These situations have to be taken
into account in the commitments acquisition process
among physical agents to make a cooperative
decision. We have used some situations that can be
present in the above coordinated task. Space
limitations SL (reduced space for movement due to
the presence of other agents), motion disturbances
MD (collisions with other physical agents), time
constraints TC (deadlines in the tasks due to the
environment dynamics), energy performance EP
(different energy expenses according to the tasks)
and special behaviours (like aggressiveness AB and
quickness QB in the execution of the tasks) are
analysed as well as examining their combinations.
Every combination of these situations has a priority-
order PO to establish the influence of each one on
the decisions of the agents in relation to the task.
The sum of all influence degrees ID of the examined
situations is equal to 1 (100%).
5 AC2 TO ACHIEVE SURE
COMMITMENTS AMONG
PHYSICAL AGENTS
Our proposal for achieving sure commitments
among physical agents based on AC
2
is drawn in
figure 4. This approach based on the CBR
methodology allows to the physical agent to be
aware if it is able to do the expected task
(introspective reasoning) by selecting the most
suitable controller to perform it (managing the
atomic capabilities associated with each controller).
5.1 Our CBR Methodology Structure
What is the problem to solve?. The physical agent
has to be able of selecting the most suitable
controller to perform the task (an offside
manoeuvre) according to the control-oriented
knowledge encapsulated on AC
2
,
taking into account
the environment conditions (D
1
,
θ
1
, D
2
,
θ
2
) and the
task requirements (Time
P
).
What is our case definition?. A case represents
both the temporal (Time
A
) and spatial (D
A
,
θ
A
)
conditions under which the agent A can perform the
task using the controller C being based on the
information about the physical body’s dynamics
represented by AC
2
. The cases base has enough and
representative data continuously updated of the
following type: Case = {Time
A
(s), D
A
(cm), θ
A
(°)
,
C (C
1
or C
2
or…C
N
), AC (
µ
A
,
σ
A
,
γ
A
,
α
A
,
ε
A
,
κ
A
)}.
Figure 4: Scheme to achieve sure commitments and
intelligent behaviours among physical agents
5.2 Our CBR Methodology Cycle
Retrieve: A progressive filtering using the task
requirements and the environment conditions is
performed in the cases base in order to extract the
most similar cases to the problem. Table 2 shows the
order and constraints of the filtering. The sequence
of filtering is established, taking into account the
relevance of the constraints.
Shooter
Defender2
Defender1
θ
I
θ
I
Offside Line
φ
1
φ
2
θ
F
θ
L
Passer
Passer
Shooter
Defender1
Offside Line
Defender2
D
1
D
2
a
b
{Time
P
, D
1
,
θ
1
}
Tas
k
{Time
P
, D
2
,
θ
2
}
{
Time
P
, D
1
, θ
1
}
{Time
P
, D
2
, θ
2
}
Case k
Case j
{Time
A
, D
A
, θ
A
, C, AC}
Case i
SRj = PO*ACj
Case j
SRi = PO*ACi
Case i
SRk = PO*ACk
Case k
{Time
A
, D
A
,
θ
A
, C, AC}
Case 1
Case 2
Case n
Structure Case-Base
{Time
P
, D
1
,
θ
1
, C, AC}
Case new 1
Case new 2
{Time
P
, D
2
,
θ
2
, C, AC}
Confirmed Solution
Proble
m
Proposed Solution: C
RETRIEVE
REUSE
REVISE
RETAIN
)6(
212,1 FLIL
θθθθφφθ
−+−=+=
ICINCO 2005 - ROBOTICS AND AUTOMATION
428
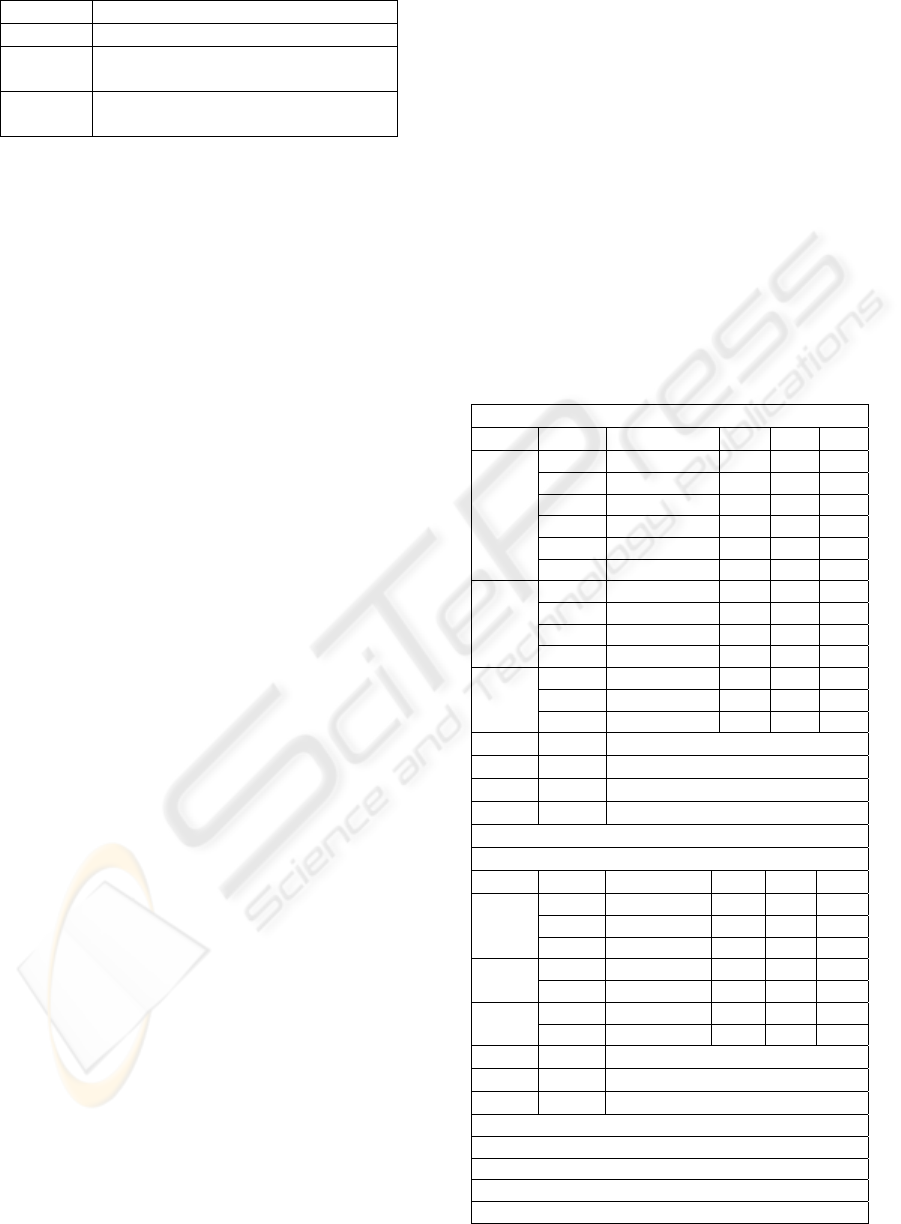
Table 2: Filtering Process
Filter Constraints
1 Time
A
≤ Time
P
?
2
D
1
-10cm ≤ D
A
≤ D
1
+10cm?
D
2
-10cm ≤ D
A
≤ D
2
+10cm?
3
θ
1
-30°≤ θ
A
≤ θ
1
+30°?
θ
2
-30°≤ θ
A
≤ θ
2
+30°?
This search allows selecting the controllers with
which the agents could perform the task.
Reuse: A new solution is generated from the
retrieved cases according to the problem conditions.
In this approach is generated the suitability rate SR
of each controller according to the associated atomic
capabilities and the priority order PO established in
the commitments acquisition process of the analyzed
situation. Each atomic capability used in this study
has a direct relation with one analyzed situation,
(e.g.
µ
A
with SL, γ
A
with MD,
ε
A
with EP, etc.). For
instance, if it is taken into account the influence
degrees ID of SL, QB, MD, AB, and EP respectively,
the priority order coefficients come given by (7).
Therefore, SR can be obtained as it is described
in (8).
In this sense, the controller with the highest
suitability rate is the most suitable to be used in the
task execution.
Revise: A revision of the proposed solution is
done in order to evaluate the obtained results and
verify if the solution has been satisfactory.
Retain: The problem conditions and the proposed
solution are indexed in order to use them in
successive iterations of the CBR cycle if the results
after the evaluation have been satisfactory.
6 AN EXAMPLE USING AC2
Physical agents must reach an agreement that allows
obtaining sure commitments in relation to the
execution of a coordinated task. The sure
commitments are necessary because they are directly
related to a better response of the system to some
undesired events and a better coordinated control in
cooperative decisions. Therefore, each physical
agent must be aware of its capabilities to perform the
task, using the self-knowledge about the dynamics
of their bodies included in their atomic capabilities.
For instance if the agent 1 proposes to agent 2 to
perform a task, both must inspect their physical
limitations in accordance with the environment
conditions and the task requirements before
committing in the performing of this task. Thus, the
agents have a high certainty about the correct
performing of the task when they acquire
commitments. In opposite case, the agents can make
an alternative decision, repeating the commitments
acquisition process again. In this sense, we have
tested this approach using an offside manoeuvre in
the robotic soccer testbed where each implicated
physical agent has the same set of controllers
designed in the section 3. The example scene
involves the following situations, SL, QB, MD, AB,
and EP. This situations set have the following PO =
[5 30 20 40 5]% according to the features of the
offside manoeuvre. Table 3 shows the introspection
process and the capabilities management performed
by the agents to solve this decision problem with the
following requirements:
Time
P
= 1.6s, D
1
= 52cm, θ
1
= 80°, D
2
= 44cm, θ
2
= 35°.
Table 3: Introspection Process and the Capabilities
Management
Physical Agent 1
Filter
Case Time
A
D
A
θ
A
C
1 1.23 30 15 C
1
2 1.44 60 75 C
2
3 1.05 20 45 C
3
4 1.30 50 90 C
2
5 1.25 50 30 C
3
1
6 1.56 60 90 C
1
2 1.44 60 75 C
1
4 1.30 50 90 C
2
5 1.25 50 30 C
3
2
6 1.56 60 90 C
1
2 1.44 60 75 C
1
4 1.30 50 90 C
2
3
6 1.56 60 90 C
1
Case
Suitability Rate
2
SR
case2
= PO*AC
1
= 0.5328
4
SR
case4
= PO*AC
2
= 0.7616
6
SR
case6
= PO*AC
1
= 0.5328
Physical Agent 2
Filter
Case Time
A
D
A
θ
A
C
1 1.30 40 30 C
2
2 1.25 50 30 C
3
1
3 1.05 30 45 C
2
1 1.30 40 30 C
2
2
2 1.25 50 30 C
3
1 1.30 40 30 C
2
3
2 1.25 50 30 C
3
Case
Suitability Rate
1 SR
case1
= PO*AC
2
=0.7616
2 SR
case2
= PO*AC
3
=0.5973
Atomic Capabilities of the controllers: See Table 1
Filtering Process: See Table 2
Priority Order (PO) definition: See equation 7
Suitability Rate (SR) definition. See equation 8
)8(IDIDIDIDIDSR
EPABMDQBSL AAAAA
εαγσµ
⋅+⋅+⋅+⋅+⋅=
(7) ]%.ID ID ID ID [ID PO
EPABMDQBSL
=
SELF-KNOWLEDGE BASED ON THE ATOMIC CAPABILITIES CONCEPT - A Perspective to Achieve Sure
Commitments among Physical Agents
429

The introspective reasoning is related to all
inspection process performed by the physical agents
in order to decide if their physical bodies allow them
to execute a proposed task. This self-inspection is
based on the control-oriented knowledge about their
control systems architectures, namely, about their
automatic controllers. Thus, the agents look for the
controllers with which they can perform the task
(e.g. agent 1: cases 2, 4 and 6, agent 2: cases 1 and
2). The capabilities management performed by the
agents aids to choose among the controllers the most
suitable according to task criteria established in the
commitments acquisition process (e.g. agent 1: case
4→C
2
, agent 2: case 1→ C
2
). Thus, the agents 1 and
2 find the most suitable controller (C
2
) to perform
the coordinated task and hence they commit to
execute it.
The above results show a good decision tool
established upon the introspective reasoning and the
capabilities management that increase the autonomy
and self-control of the agents. The introspection and
the decisions based on capabilities give a
trustworthy idea about the real reliability with which
each agent can commit in cooperative systems.
7 CONCLUSIONS
This work presents a way of developing intelligent
behaviours in physical agents by means of a suitable
exploitation of the information of their control
systems. This information should be exploited to
enhance the autonomy and the decision ability of the
physical agents for instance in coordinated tasks.
Our proposal based on AC
2
makes possible to obtain
safer systems taking into account control-oriented
knowledge. Explicitly, this paper shows the need
and influence of AC
2
on the decisions making
structure of cooperative intelligent agents when
executing coordinated tasks.
This proposal would open the research horizon
towards an engineering perspective that could be
used as an effective design methodology of physical
agents based on AC
2
. However, this approach is just
one possible technique that can be used to extract the
atomic capabilities. In this paper has been presented
to remark the potential of AC
2
in the linkage of
control systems with multi-agent systems. There are
open studies on how to take advantage of this
approach. Furthermore, to select one paradigm for
the implementation of these concepts is not trivial at
all, and its development is still open.
REFERENCES
Sanz Ricardo, Yela Adolfo and Chinchilla Rafael, 2003. A
Pattern Schema for Complex Controllers. IEEE
Emergent Technologies for Factory Automation
ETFA'2003.
Jennings N.R., Bussmann S., 2003. Agent-Based Control
Systems. Why Are They Suited to Engineering
Complex Systems?, IEEE Control Systems Magazine.
Sanz Ricardo, Escasany Juan and López Ignacio, 2001.
Systems and Consciousness. Towards a Science of
Consciousness Conference TSC'2001.
Sanz Ricardo, Matía Fernando and Galán Santos, 2000.
Fridges, Elephants, and the Meaning of Autonomy and
Intelligence. IEEE International Symposium on
Intelligent Control ISIC'2000.
Sanz Ricardo and Meystel Alexander, 2002. Modelling,
Self and Consciousness: Further Perspectives of AI
Research. Workshop on Performance Metrics for
Intelligent Systems. Gaithersburg, USA. August 13-15.
Sanz Ricardo, Holland Owen, Sloman Aaron, Kirilyuk
Andrei, Edmondson William and Torrance Stephen,
2004. Self-aware Control Systems. Research white-
paper for the Bioinspired Intelligent Information
Systems Call.
Murray R., Astrom K.J., Boyd S., Brockett R.W., Stein G.,
2003. Future Directions in Control in an Information-
Rich World. IEEE Control Systems Magazine.
Oller A., de la Rosa J. Ll. and Del Acebo E., 1999. DPA
2
:
Architecture for Cooperative Dynamical Physical
Agents. 9th European Workshop on Modelling
Autonomous Agents in a Multi-Agent World
MAAMAW ’99, Valencia.
Innocenti B., de la Rosa J. Ll., Vehí J., Muñoz I.,
Montaner M., Fàbregas M., Figueras A., Ramon J. A.,
2001. Examples of Dynamical Physical Agents for
Multi Robot Control. 2do Workshop Hispano-Luso de
Agentes Físicos. Madrid-Spain.
De la Rosa J., Quintero M. Christian G., Vehí J., 2004.
About the Value of Introspection for Physically
Grounded Commitments of Cooperative Intelligent
Agents. In Proc. of V Workshop on Physical Agents,
pp. 131-137. ISBN 84-933619-6-8.
Quintero M. Christian G., de la Rosa J., Vehí J., 2004.
Physical Intelligent Agents’ Capabilities Management
for Sure Commitments in a Collaborative World.
Frontiers in Artificial Intelligence and Applications,
IOS Press, pp. 251-258. ISBN I 58603 466 9, ISSN
0922-6389.
Zubelzu J., de la Rosa J., Ramon J.A., Quintero M.
Christian G., 2004. Managing Heterogeneity in a Robot
Soccer Environment. Frontiers in Artificial Intelligence
and Applications, IOS Press, pp. 317-322. ISBN I
58603 466 9, ISSN 0922-6389.
Quintero M. Christian G., de la Rosa J., Vehí J., 2005.
Studies about the Atomic Capabilities Concept for
Linear Control Systems in Physical Multi-agent
Environments. 6
th
IEEE International Symposium on
Computational Intelligence in Robotics and
Automation. Finland, June 27-30.
ICINCO 2005 - ROBOTICS AND AUTOMATION
430
