
DETECTABILITY AND DIAGNOSABILITY OF DISCRETE
EVENT SYSTEMS
Application on manufacturing systems
Moamar Sayed Mouchaweh, Alexandre Phillipot, Véronique Carré Ménétrier
Université de Reims, CReSTIC - LAM, Moulin de la Housse B.P. 1039, 51687 REIMS Cedex 2, FRANCE.
Keywords: Discrete Event Systems, Modelling, Diagnosis, Manufacturing systems.
Abstract:
The diagnosis is defined as the process of detecting an abnormality in the system behavior and
isolating its causes or sources. Not all the systems are diagnosable. Thus, before Appling a
method to diagnose a system, we need to know if this system is diagnosable according to the set
of failures required to be detected and isolated. This paper presents an algorithm to determine if a
system is detectable or not, i.e., if we can know, at each instant, whether the system works under
a normal or abnormal functioning state. In the case that the system is detectable, this algorithm
determines if this system is diagnosable. This algorithm combine
s event and state based
approaches in order to maximise the diagnosability power with a minimum number of sensors. In
addition, the time is integrated and modelled with fuzzy intervals to enhance this diagnosabilty
power and to take into account the imprecision of events occurrences instants. An example of
manufacturing system is used to illustrate the functioning of this algorithm.
1 INTRODUCTION
The complexity of industrial systems increases
rapidly while in the same time safety, availability,
reliability, and performances of these systems rise.
Consequently, the potential for system to fail is
enhanced regardless how safe the designs are, how
improved the quality of control techniques are and
how better trained the operators are (Perrow, 1984).
Discrete Event System (DES) is dynamic systems
equipped with a state space and a state-transition
structure. One of the key benefits of a DES is that
there is no need to descretize time and yet one can
capture the asynchronous nature of event processes.
DES is often modelled in using a finite-state
automaton, a Petri net or process algebra. Each
modelling tool has its advantages and disadvantages
depending on the objectives of modelling: model
complexity or natural projection and formalisation
facilities.
When failures occur in a system, observations are
analysed using the system model to generate a set of
possible failures. A failure implicates one or more of
system components and explains all the observed
measurements: deviating and normal. Generally,
failures can be characterized as: permanent or
intermittent. The permanent failures can be divided
into two major kinds: progressive or abrupt. The
type of failures can be classified as: sensor failures,
actuator failures, process failures and control loop or
controller failures.
In this paper, a quick review of major approaches of
failure diagnosis of DES is presented. Since not
every system is diagnosable, these approaches define
a notion of diagnosability based either on event, on
state or both depending on their model and the type
of failures: permanent or intermittent, that they must
detect and diagnosed. Then a method to diagnose
DES is introduced. This method is modular and
decentralized. Before applying this method to
diagnose DES, an algorithm is used to determine if
the process is diagnosable according to the
observable events and for the set of failures to be
isolated. If the system cannot be diagnosed, then
sensor maps must be modified in order to provide
the diagnosability property to the system. Finally, an
example of a manufacturing system is used to
illustrate the diagnosis method with the
diagnosability algorithm.
149
Sayed Mouchaweh M., Phillipot A. and Carré Ménétrier V. (2005).
DETECTABILITY AND DIAGNOSABILITY OF DISCRETE EVENT SYSTEMS - Application on manufacturing systems.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 149-154
DOI: 10.5220/0001176201490154
Copyright
c
SciTePress

2 FAILURE DIAGNOSIS
APPROACHES
There is a great deal of methods for designing and
developing an automated diagnosis system
(Ramdage, 1987), (Su, 2004), (Wang, 2000),
(Cassandras, 1999). A common feature of these
methods is the use of a model to specify the correct
behaviour of the system and then to analyze the
observations of the system current operating state to
detect a failure. The choice of one of these methods
depends on several factors as: the dynamic of the
system (discrete, continuous and hybrid),
implementation standpoint (on line, off line),
information representation (quantitative, qualitative),
system complexity (large or simple) and the depth of
available information about the system
specifications and behaviour (structural, analytical
and heuristic knowledge).
We will focus on the DES failure methods. They can
be classified according to the structure of their plant
and diagnoser models into 3 main categories:
centralized, decentralized and distributed structures.
3 STRUCTURE OF DES FAILURE
DIAGNOSIS METHODS
There are three main structures of plant and
diagnoser models of DES:
1. Centralized approaches: There is one
centralized system model associated with one
centralized diagnoser, which collects observations,
then makes a final decision about the target system’s
fault status. In (Zad, 1998), we can find an example
of these approaches.
2. Decentralized approaches: There is one
centralized system model associated with several
local diagnosers, each of which receives
observations from a specific set of sensors and
makes local diagnosis decision based on such local
observations. A very limited communication is
permitted through a centralized coordinator to solve
the problem of the possible ambiguity between local
diagnoser decisions. In (Sampath, 1994), an example
belongs to this category.
3. Distributed approaches: The system consists of
several local components, and is associated with
several local diagnosers, each of which is usually
responsible for a specific local component. Since
neither a centralized system model nor a centralized
coordinator exists, a pure concurrent communication
among local diagnosers is necessary. In (Su, 2004),
(Holloway, 1994), we can find an example
belonging to this category.
4 DES DIAGNOSABILITY
NOTIONS
The DES failures diagnosis methods can be divided
into two main categories: event-based methods and
state-based methods. In event-based methods,
failures are modelled as execution of certain faulty
events. The DES plant representation is based on a
finite-state automaton. This model accounts for the
normal and failed behaviour of the system. All
information relevant to the diagnosis including
sensors information is captured in the event set of
the model. Typically, the observable events in the
system are one of the following: commands issued
by the supervisor and sensor readings immediately
after the execution of the above command, and
changes of sensor readings. The unobservable events
are failure events or other events which cause
changes in the system state not recorded by sensors.
This model is obtained by a product composition of
finite-state machines models of individual system
components.
A diagnoser is designed to decide whether the
original behaviour contained a fault or not in basing
on sequences of observable events. The diagnoser
should announce a fault at most n steps after the
fault occurred. Once a fault is announced, the
diagnoser cannot stop announcing it (Sampath,
1994).
To enhance the diagnosability, the above framework
is extended to dense-time automata (Tripakis, 2001).
This extension is useful since it permits to model
plants with timed behaviour. It also allows
diagnosers to base their decisions not only on the
sequences of observed events, but also on time
delays between these events.
An event-based method is proposed in (Garcia,
2003) for monitoring and diagnosis of
manufacturing systems. To detect a special event
(failure), a monitoring observer (agent) analyzes
discrete event signals triggered by entities as they
transit through the monitored system. In (Holloway,
1994), (Deepa, 2000) the authors present an
approach to fault monitoring in manufacturing
systems allowing the modelling of process in which
both single-instance and multiple-instance
behaviours are exhibited concurrently. The timed
sequence events generated by the DES under
supervision is compared with a set of specifications
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
150
of normal functioning called templates. These
templates are suitable for manufacturing systems
and can operate independently in parallel.
An equivalent state-based approach is considered
where the occurrence of a failure is modelled as
reaching of certain faulty states (Lin, 1994). This
approach uses a general model for both types of
diagnosis: off-line and on-line. For on-line, a
deterministic Moore automaton with partial state
observation and no event observation is used while
in off-line diagnosis a nondeterministic Mealy
automaton with no state observation and partial
event observation.
In (Zad, 2003) a based state model to realize the
passive diagnosis was proposed. The state set of
system is partitioned according to system condition
(failure status). A diagnoser, based on finite state
automata, estimates the conditions in using the
sequence events and state outputs.
In (Philippot, 2005), we have proposed a method to
realize the diagnosis of DES. In the next, we define
an algorithm to determine if the system is
diagnosable, this algorithm is adapted for our
method and it limits the number of states necessary
to detect actuator-sensor failures as we will see later.
5 PROPOSED APPROACH TO
FAILURE DIAGNOSIS
In (Philippot, 2005), a model-based approach to
diagnose DES is proposed. A mathematical model G
must be constructed to define how system states
change due to event occurrences. The model is
decentralized: the system consists of several local
components (G
i
, i = 1 .. n) with a coordinator to
realize a minimum of communication between these
local components. The diagnoser model is
distributed: several local diagnoser (D
i
, i = 1 .. n) are
constructed, each one of them is usually responsible
for a specific local component. The goal of the use
of decentralized model and a distributed diagnosis is
to reduce the spatial explosion problem at the design
stage and to facilitate the localisation of default
elements.
A notion of diagnosability is defined since not every
system is diagnosable. This notion depends on the
partition required (failures to isolate) and on the
observable events.
To enhance the diagnosability, time is integrated to
this approach. Fuzzy functions, modelling the
minimum and maximum expectation moments
accepted for an event to take place, are computed.
The use of fuzzy intervals is useful to better take
into account the imprecision and uncertainty
attached to the calculation of these moments and to
better model the tractability which can be used to
realize a prognostic, particularly useful for the
progressive failures.
This approach uses different representation tools
(automata, rules, algebraic and mathematical
equations, ..) according to the available information.
The goal is to enrich the model in using all the
available information sources with a suitable
representation tool to be able to realize the
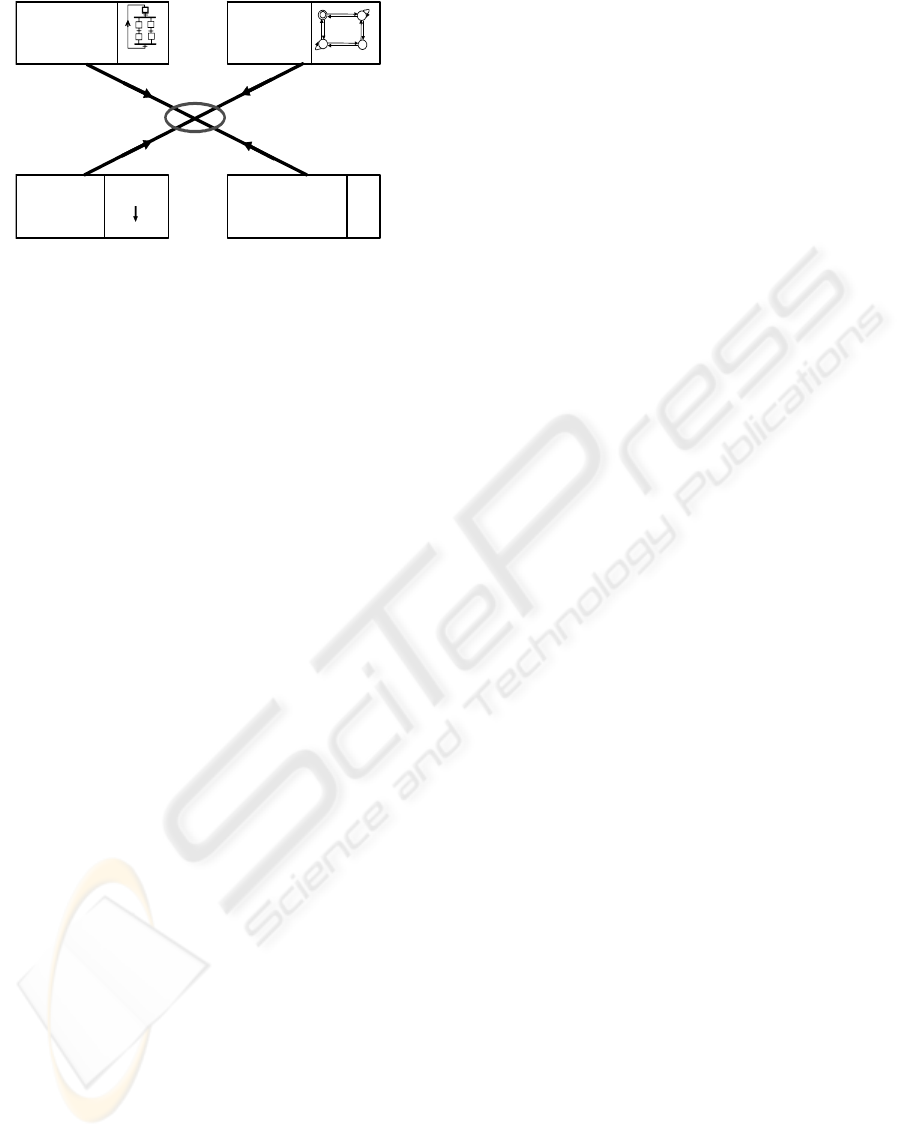
diagnosis. These sources are (see figure 1):
• functional information contained in the
process schedule conditions,
• structural information coming from the
process itself and the sensors-actuators
spatial distribution,
• symbolic information given by experts
and/or previous experience obtained by a
learning set of previous functioning,
• temporal information coming from the
space and temporal parameters of process
actuators and sensors.
For this approach, three models are defined: plant
control and diagnoser models.
5.1 Plant model
A plant model is divided into several components.
Each model G
i
and corresponding language L
i
describe the logical, untimed behaviour of the
monitored system. G = (M,
∑
c
) where M is a Moore
automaton: M = (
∑
, Q, Y,
δ
, h) :
∑
is the set of finite
events, Q is the set of states, Y is the output space,
δ
: ∑ x Q
→
Q is the state transition function.
δ
(
σ
, q)
gives the set of possible next states if
σ
occurs at q.
h: ∑ x Q
→
Y is the output function. H(
σ
, q) is the
observed output when
σ
occurs at q.
∑
c
⊆
∑
is the
set of controllable events.
∑
o
⊆
∑
is the set of
observable events where
∑
c
⊂
∑
o
. An automaton is
Functional
Information
Structural
Information
Symbolic
Information
Temporal
Information
Common Language
for dia
g
nosis
Co nt ro l
0
1
2
3
If - Then
Historic +
Expert
Plant
∆t?
Figure 1: Information sources
DETECTABILITY AND DIAGNOSABILITY OF DISCRETE EVENT SYSTEMS - Application on manufacturing
systems
151
used for each model. This automaton takes into
account all the observable events. The detailed
explication of the construction of this model can be
found in (Philippot, 2004), (Philippot, 05).
5.2 Control model
The controller model is constructed in using a
Sequential Function Charts. This letter reflects the
functional information corresponding to the schedule
conditions for all system components. The SFC is
chosen to model the controller because it is well
adapted for industrial applications especially
manufacturing systems.
5.3 Diagnoser model
The set of failures to be detected and isolated must
be defined as well as the type of these failures. Let
{}
∑
=
f
n
fff ,..,,
21
be the set of failures to be
detected and
{
}
n
fffN
SSSS ,..,,,
21
=Π denotes the
set of normal partition and the type of failures to be
isolated: sensor or actuator and which sensor or
actuator. Additionally, the nature of failure must be
defined: permanent or non-permanent.
Before constructing the diagnosers, a notion of
diagnosability must be defined to determine if the
system is diagnosable or not. A system is detectable
according to a set of observable events and a set of
partition iff each normal state can be distinguished
from all the failures:
)()(,
)()(
qhqhSqSq
SHSH
ANN
ANN
′
≠⇒∈
′
∀∈∀
⇒≠
(1)
Then, the system is diagnosable if we can
distinguish each partition of the set Π. This isolation
must be determined within a bounded number of
events and a bounded time:
)()(:, qhqhSqq
AN
′
≠∈
′
∀
(2)
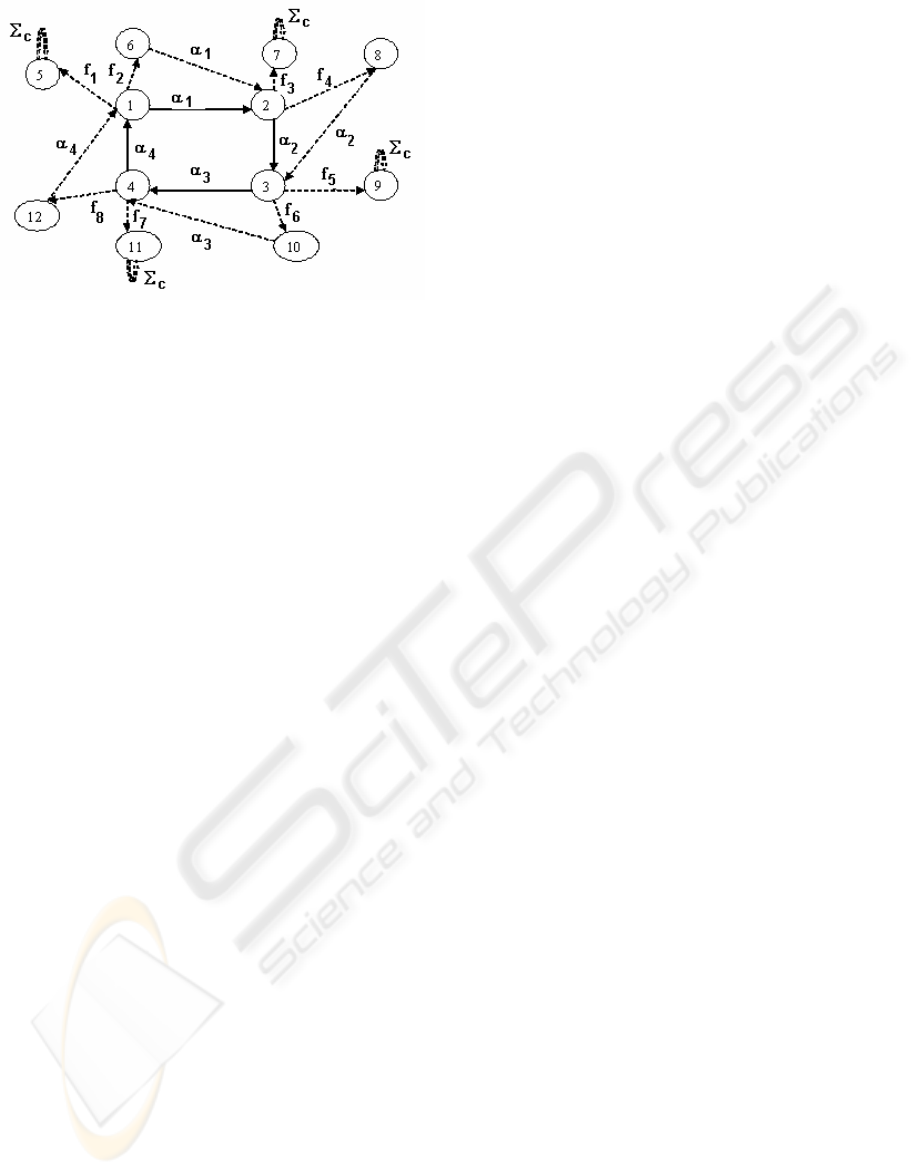
Let us take the following example (see figure 2) of a
process which has 4 normal states S
N
= {1, 2, 3, 4}
with the observable events
{}
4321
,,,
αααα
=Σ
o
.
The partition to be identified is
S
AN
= {5, 6, 7, 8, 9,10, 11, 12} which correspond to
the failure events
{}
∑
f
ffffffff
87654321
,,,,,,,.
The outputs of each state, thank for the sensors are:
H = {h
1
, h
2
, h
3
, h
4
, h
5
, h
6
, h
7
, h
8
, h
9
, h
10
, h
11
, h
12
}.
The figure 2 shows the functional model
corresponding to the product of the model plant with
the control model, in solid lines, and the diagnoser
model in dotted lines.
The failure events: f
1
, f
3
, f
5
and f
7
, indicate an
equipment failures, actuator, as stuck on or stuck off.
These events are non-observables and must be
detected either by an observable event which entails
a state with an output different from the estimated
one, in the case of stuck on, or by the fuzzy
functions of expected events occurrence instants in
the case of stuck off. The other failure events denote
the sensor failures. These events can be observable
or non-observable. In the case of observable ones,
the failure is detected at once without any delay.
This fact is important for the functioning of the SFC
in order to permit the evolution of the command.
Indeed our approach requires a validate sensor
values before permitting a new command. In the
case of non-observable events, as in the figure 2, the
failure must be detected in using only the sensors
outputs. In this case the non-observable failure
events correspond to a sensor stuck on, level 1, or
stuck off, level 0. The number of sensors must be
enough to distinguish all the states of normal and
abnormal states.
We can find that our approach combines event and
state based approaches in order to maximise the
diagnosability power with a minimum number of
sensors. In addition the time is integrated and
modelled with fuzzy intervals to enhance this
diagnosabilty power and to take into account the
imprecision and uncertainty of time occurrence
events.
Let us explain our algorithm to know if the system
represented by the figure 2 and for
{}
4321
,,,
αααα
=Σ
o
and S
AN
= {5, 6, 7, 8, 9, 10,
11, 12} is diagnosable. The first step of our
algorithm is to construct a matrix M(nxm) where n is
Figure 2: Functional and
diagnoser models
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
152
the number of observable events and m is the
number of normal states. Then, we determine the set
of events
∆
k
produced by the same sensor k. Let
suppose that for the sensor 1:
∆
1
= {α
1
, α
4
}and for
the sensor 2:
∆
2
={α
2
, α
3
}. For each event, we put 0
for all the states sources of this event as well as the
events produced by the same sensor. We put 1 for
the other colons. This matrix will be used to know if
a system is detectable or not and then if it is
diagnosable or not. Indeed, the event,
α
2
, indicates
that the state 1 was normal, but we need to wait the
event α
4
to know if the state 2 was normal. For the
example of the figure 2, we can find:
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
Σ
=
0110
1001
1001
0110
4321
4
3
2
1
α
α
α
α
No
S
M (3)
The application of (1) on (3) we can find that the
system is detectable iff:
1)..1:)..1:(( === mjniMORAnd
ij
(4)
If the system is detectable, the application of (3) on
(2) determines if the system is diagnosable :
1)..1:)..1:(( === nimjMXORAnd
j
i
(5)
We can find that the system of the figure 2 is
diagnosable. To calculate the delay to realize the
diagnosis, we use the following equation:
)..1:)..1(1( nimjMNOMaxDelay
ji
=== (6)
where NO1
i
is the number of ones in each line i. As
an example, to detect and localize a failure in the
state 2, failure f
4
, we need to wait that the event
α
4
takes place. Thus the delay is equal to 2 observable
events. In applying the same manner for the other
lines, we can find that the system is 2-diagnosable
for all the failures of the figure 2.
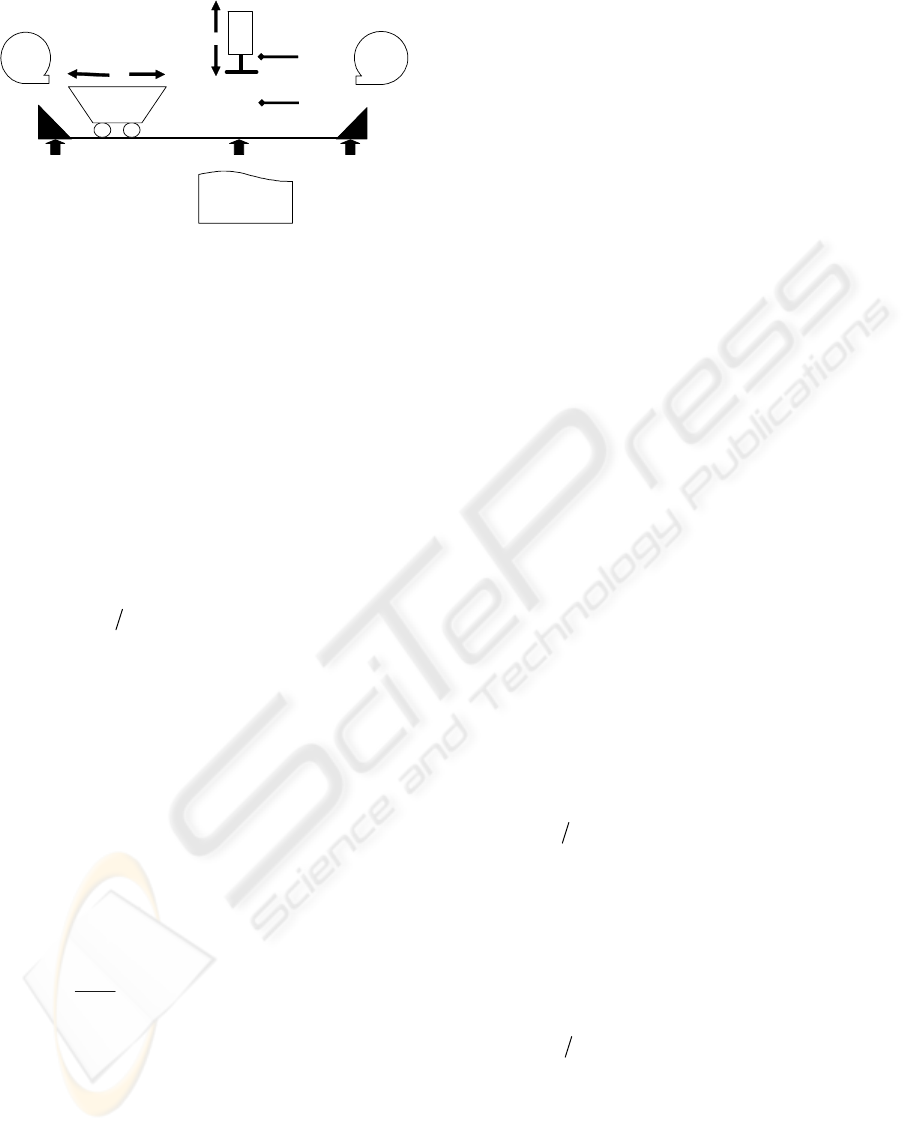
6 APPLICATION OF THE
PROPOSED METHOD
We will apply the notion of diagnosabilty to the
following example of a wagon with an electric
actuator with two senses of movements: left and
right, and a double effect cylinder: up and down.
Three sensors a, b and c are used to determine the
wagon position and two sensors fcr and fcs to
determine the cylinder position as it is illustrated in
figure 3. The schedule conditions are well defined
and the following hypotheses are verified:
•
There is one product (i.e. one wagon), each
actuator has its proper sensors and each
sensor is used by one actuator. The relax of
this hypothesis will be study in other
paper,
•
An accepted response time is defined for
each actuator as well as for the process by
the designer,
•
The wagon inertia is null.
The figure 4 shows the functional models of the
actuator (wagon) and the double effect cylinder
according to the SFC (Philippot, 2005).
The diagnosability matrix for the actuator, M
act
, and
the cylinder, M
cyl
, for the sensor failures are:
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
↑
↓
↑
↓
Σ
=
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
↑
↓
↑
↓
↑
↓
Σ
=
0110
1001
1001
0110
81141
01111110
11100111
11100111
10011001
10011001
011111
10
161281911741
cr
cs
cs
cr
No
cyl
No
act
f
f
f
f
S
M
a
c
c
b
b
a
S
M
We can find from M
act
, and M
cyl
, that the cylinder is
b
fcr
fcs
Up
Down
Right
Left
a c
Delivery point
Ore X
Ore Y
Figure 3: Exemple of application
DETECTABILITY AND DIAGNOSABILITY OF DISCRETE EVENT SYSTEMS - Application on manufacturing
systems
153

diagnosable and it is 2-diagnosable system and the
actuator (wagon) is diagnosable and it is 6-
diagnosable system. As an example, while being in
the state 11, figure 4, a failure has occurred in the
sensor a. We need to wait the occurrence of the
event b of the state 4 to detect and isolate this
failure.
7 CONCLUSION
In this paper, an algorithm to determine if a Discrete
Event System (DES) is diagnosable or not, for a set
of failures and according to a set of observable
events, is presented. This algorithm treats the case of
failures modelled by non-observable events for both
actuators and sensors. The failures modelled by
observable events can be also treated by this
algorithm and the detection and isolation will be
realized without any delay. This algorithm uses the
notion of events to determine if a permanent failure
has occurred. At the same time and to find a remedy
to the problem of initialization of the system and the
diagnoser, it uses the notion of state, to determine if
a failure has occurred before the initialization of the
diagnoser. This diagnosis is realized within a
bounded delay in basing on the sensors outputs and
the events sequences and their occurrence times.
This algorithm was tested successfully on an
example of manufacturing system. Firstly, this
algorithm has shown that the system is diagnosable
for the set of sensors and actuators failures and
according to the set of observable events. Then a
method to diagnose DES has applied, it has
diagnosed several simulated failures within a
bounded delay maximally equal to 6 events.
REFERENCES
Cassandras, C. G., Lafortune, S., 1999. Introduction to
Discrete Event Systems, Kluwer Academic Publisher.
Deepa Pandalai, N., Holloway, L. E., 2000. Template
Languages for Fault Monitoring of Timed Discrete
Event Processes, In IEEE Transactions On Automatic
Control 45( 5).
Garcia, H. E., Yoo, T. S., 2005. Model-based detection of
routing events in discrete flow networks, Automatica
41.
Holloway, L. E., Chand, S., 1994. Time templates for
discrete event fault monitoring in manufacturing
systems, In American Control Conf., Baltimore, MD.
Lin, F., 1994. Diagnosability of Discrete Event Systems
and its Applications, In Discrete Event Dynamic
Systems4, Kluwer Academic Publishers, Boston, USA.
Perrow, C., 1984. Normal Accidents:Living with High Risk
Technologies, Basic Books, Inc., New York.
Philippot, A., Sayed Mouchaweh, M., Carré-Ménétrier,
V., 2005. Multi-models approach for the diagnosis of
Discrete Events Systems, In IMACS’05, International
conference on Modelling, Analyse and Control of
Dynamic Systems, Paris-France.
Philippot, A., Tajer, A., Gellot, F., Carre-Ménétrier, V.,
2004. Méthodologie de modélisation dans le cadre de
la synthèse formelle des SED. Conférence
Internationale Francophone d’Automatique, Douz,
Tunisie.
Ramadge, P., Wonham, W., 1987. Supervisory control of
a class of discrete event processes, In SIAM J. Control
Optim. 25(1).
Sampath, M., Sungupta, R., Lafortune, S., Sinnamohideen,
K., Teneketzis, D., 1994. Diagnosability of discrete
event systems, In 11
th
Int. Conf. Analysis Optimization
of Systems: Discrete Event Systems, Sophia-Antipolis,
France.
Su, R., 2004. Distributed Diagnosis for Discrete-Event
System, Thesis of PhD, University of Toronto, Canada.
Tripakis S., 2001; Fault Diagnosis for Timed Automata,
VERIMAG (www-verimag.imag.fr).
Wang, Y., 2000. Supervisory Control of Boolean Discrete-
Event Systems, Thesis of Master of Applied Sciences,
University of Toronto, Canada.
Zad, S. H., Kwong, R. H., Wonham, W. M., 2003. Fault
Diagnosis in Discrete Event Systems: Framework and
model reduction, IEEE Transactions On Automatic
Control 48( 7).
Zad, S. H., Kwong, R. H., Wonham, W. M., 1998. Fault
diagnosis in discrete-event systems. In CDC’98, IEEE
Conference on Decision and Control, Tampa, Florida,
USA.
Figure 4: Functional models of the wagon and the
cylinder for the application example
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
154
