
LOOKING FOR MASCONTROL: A MULTIAGENT SYSTEM
FOR IDENTIFICATION AND CONTROL
E. J. González, Alberto Hamilton, L. Moreno, R. L. Marichal, J.A. Méndez, Vanessa Muñoz
Grupo de Computadoras y Control, Dept. Física Fund. y Exp., Elect. y Sistemas,
Av. Astrofísico Fco. Sánchez S/N, CP. 38207, La Laguna, Spain
Keywords: Identification, control, MAS, ontologies.
Abstract: In this paper, MASCONTROL, a multiagent system (MAS) for system identification and process control, is
presented. This MAS implements a self-tuning regulator (STR) scheme. In this work, an Ontology Agent
(OA) is included, using DAML+OIL as ontology language. From their experience, the authors consider this
architecture highly useful for identification and control processes.
1 INTRODUCTION
Multiagent Systems (MAS) (Faratin et al, 2000)
have been shown to be an effective tool in a wide
range of applications. Nevertheless, researchers
involved in process automation have not taken
significantly advantage of this tool (Cockburn et al,
1996, Velasco et al, 1996, Seilonen et al, 2002).
Some reasons can be found in (Seilonen et al, 2002):
automation applications need real-time requirements
that are out of currently agent technology reach,
difficult agent treatment about interrelations and
lack of parallelism.
The aim of this paper consists of presenting the
development of a multiagent system oriented to
process automation. The development of this
standarized and complex multiagent system, called
MASCONTROL is detailed in Sections 2-6: a
preliminary introduction, a justification of the
selected tools, description of the designed
framework and the designed ontology (this
multiagent system includes an ontology agent for
communication with external agents) and results
obtained in the control process of a real plant.
Finally, conclusions are reported in Section 7.
2 INTRODUCTION TO
MASCONTROL
FIPA (Foundation for Intelligent Physical Agents)
specifications have become a stronger standard in
MAS development and they involve not only agent
language specifications but also agent management,
conversations, etc. The FIPA agent management
reference model provides the normative framework
within which FIPA agents exist and operate. The
Directory Facilitator (DF) provides yellow pages
services to agents that query it to find out services
offered by other agents. The Agent Management
System (AMS) offers white pages services and
maintains a directory, which contains transport
addresses for agents registered in the Agent Platform
(AP). The Message Transport Service (MTS) is the
default communication among agents on different
APs.
In this paper, the paper have applied the power of
the MAS to control disciplines. In particular, the
involved agents are supposed to implement the
different roles related to a self-tuning regulator, STR
(Aström and Wittenmark, 1995, Söderström and
Stoica, 1989, Warwick, 1989). The authors consider
this problem as a very interesting one in the
application of MAS. The first reason is that a STR
presents conceptually different modules, such as
sampling, identification or control. Other reason
consists of the parallelism in the system, optimizing
the calculation capacity this way. Both reasons make
MAS appropriate.
3 SELECTION OF THE TOOLS
This section justifies briefly the selection of the used
tools for the MAS development. It is pretended to be
119
J. González E., Hamilton A., Moreno L., L. Marichal R., A. Méndez J. and Muñoz V. (2005).
LOOKING FOR MASCONTROL: A MULTIAGENT SYSTEM FOR IDENTIFICATION AND CONTROL.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 119-124
DOI: 10.5220/0001173401190124
Copyright
c
SciTePress

an elementary survey guide for those researchers
that would like to use a MAS in their projects.
3.1 Multiagent framework
Once FIPA standard has been chosen for the
development of the system, the following step
consists of the selection of the multiagent
framework. This fact involves being not worried
about technical aspects such as a detailed
communication implementation. With regard to this,
there are many tools for the design and
implementation of MAS.
In this sense, the authors have chosen FIPA-OS.
This is an Open Source agent framework from
research at Nortel Network’s Harlow Laboratories
that implements the FIPA specifications about agent
interoperability. There are other Java-based
implementations of FIPA specifications such as
JADE and ZEUS. However, FIPA-OS has been
chosen in this work due to
its well-placed use of Java interfaces to separate
agent subsystems, translation of incoming
messages and system occurrences into events for
internal processing, an isolated scheduling policy
for task execution, use of a conversation object
to enforce protocols and hold messages, and a
task generation tool for constructing tasks from
protocol definitions (Fonseca, 2002)
3.2 Ontology Language
There are few situations where a standalone agent is
able to manage an open and dynamic environment:
agents are designed for communicating each other.
In this sense, having a shared ontology (Falasconi et
al, 1996) makes a multiagent system more powerful,
as agents developed by different designers can
interact in the same environment. In this case, the
problem to solve is too easy (only few terms in the
ontology are necessary for the problem, as can be
seen below). However, it is interesting to consider
its use in more complex situations.
For ontology design, there are many possible
ontology languages. The authors have used
DAML+OIL, a markup language, as ontology
language, because it provides a basic infrastructure
that allows a machine to make some sorts of simple
inferences that human beings do and because this
language has become a standard in ontology
representations. At this moment a new, improved
and more expressive markup language, known as
OWL, is being developed. Nevertheless
DAML+OIL is sufficiently expressive for carrying
out this work.
This selection involves the use of some related
software, in particular an ontology editor (OilEd has
been chosen) and a DAML+OIL parser (Jena).
3.3 Evenet2000
The problem of optimization is much related to
identification and control. In both disciplines, it is
usually necessary to optimize some parameters for a
model (identification) or for a controller. In the same
way, the training of a neural network consists of
finding the best values of the weights of the
network. Because of this similarity of methods, the
authors have considered the possibility of the
application of neural networks training methods to
control problems.
For this MAS, the authors have preferred used
Evenet2000 (Gonzalez et al, 2001 and 2003), a Java-
based neural network toolbox developed at the
University of La Laguna. This Open-source tool
offers some features such as the possibility of
designing an arbitrary neural network to optimize.
This tool develops an approach to derive gradient
algorithms for time-dependent neural networks,
using the Signal Flow Graph theory. Moreover, the
designed structure makes it not to be limited to
algorithms based on the gradient. This tool has been
shown as highly useful in a suite of control
problems.
In MASCONTROL, Evenet2000 is used in two
ways. Firstly, for the optimization of the parameters
of a model. Secondly, in the optimization of the
parameters of a controller such as the value of K
p
in
a proportional controller. The different agents import
Evenet2000 packages for its use (Gonzalez et al,
2004).
4 MASCONTROL AGENT
FRAMEWORK
This framework is composed of 8 different types of
agents. Each agent assumes one of the roles that
appear in a STR scheme.
ReaderCommandAgent (RCA) This agent samples
the output of the system. Another role assumed by
this agent consists of calculating and sending the
command to the system. Finally, it stores a vector
containing input-output data. This vector makes
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
120

possible the system identification and determines if
the input is rich enough for that identification.
IdentificationAgent (IA) Several identification
agents can appear in the system. Each IA tries to
identify the system from the input-output vector. For
this purpose, it uses Evenet2000 modules. A system
user or an IdentificationLoaderAgent (from a record
of previous trainings) can select a training method
for each IA. The system model is declared in the
XML profile and loaded as an Evenet2000 neural
network file. In other words, for an IA, the problem
is equivalent to the one of weight optimization in a
neural network whose training pattern is defined by
the input-output vector. The authors have included a
one-step ahead predictor in the identification
process.
LinearIdentificationAgent (LIA) Similar to the IA,
but this agent assumes a model that allows a linear
regression, for example an ARX model. In this
sense, the model is defined by the orders of the
numerator and the denominator of the transfer
function. Instead of Evenet2000 modules, an object
that implements an identification through the
Forgetting Factor technique is used (Aström and
Wittenmark, 1995, Söderström and Stoica, 1989,
Warwick, 1989).
CentralIdentificationAgent (CIA) This agent
manages the Ias, linear or not. Initially it asks the DF
for the agents that offer the service of identification
in the MAS. Every T seconds, the CIA asks the IAs
for the results of the current optimizations (error,
parameter set and model file), selecting that
optimization offering the best results. Then it
informs the rest of the IAs with the same model the
set of parameters that minimize the criterion
function. This way, the IAs take this set as an initial
training one in new optimization processes. With the
aim of providing the MAS with some intelligence,
the CIA counts how many times each training
method obtains the best results optimizing the
criterion function. This information is stored in a file
(written in DAML+OIL), that could be used in the
initiatization other IAs.
OptimizerAgent (OpA) This agent optimizes the
controller parameters. For this purpose, it takes the
set calculated by the identification agents and
includes it as constants in a new system. This system
is treated as a neural network whose parameters are
the controller ones. In a general way, patterns are
chosen as pairs reference input, reference input in a
serie of different reference inputs. With this
implementation, high raising time and valued peaks
are penalized. The model of the system can be easily
changed due to Evenet2000 modularity.
CentralControlAgent (CCA) This agent is similar
to CIA as it plays a manager role in the system, but
in this case it is related to the optimization of model
parameters. Each T seconds, the CCA asks the CIA
for the details (model with the best results,
parameter set) of the identification. After analyzing
these data, the CCA asks the OpAs for the
parameters that minimize the criterion function and
for the value of this minimization. This agent stores
the results for subsequent sending to the RCA.
Finally, the CCA orders the OpAs to stop the current
optimizations and to start a new one from the
calculated optimal parameter set. As the CIA, the
CCA stores the number of times that a given training
method has offered the best results for the analyzed
control process.
InputOutputAnalyzerAgent (IOAA) This optional
agent analyzes process input and output data
(calculated by the RCA). This analysis is made in
two ways. First, it tests, in an intuitive way, if the
system input is rich enough. For this purpose, this
agent calculates the maximum and minimum input
value in the last N periods, and it tests if the
subtraction of these values is less than a defined low
enough threshold. If it is the case, it is supposed that
the applied input is not rich enough and the IOAA
suggests the RCA that the reference input should be
changed. This change is supposed to improve the
identification process. In a similar way, output data
are analyzed too. In this case, the IOAA could
suggest a reference input change or a study about the
type of the system. The option of changing the
reference input can be inhibited on-line through a
user interface.
Ontology Agent (OA) This is one of the key
considerations in this phase of the work. This way, it
differs from other MAS-based control systems. The
definition of an external ontology provides
numerous advantages: it allows consultation with
respect to concepts, the updating and use of
ontologies and the elimination of the need of
programming the entire ontology in every agent,
hence reducing required resources. Currently, in
MASCONTROL, this agent only takes part in the
study of the type of the system.
5 MASCONTROL ONTOLOGY
This section will describe the main features defined
in the implemented ontology. As stated above, most
of the concepts have not been used in
MASCONTROL. However, they are defined
looking for an open system where a new agent,
LOOKING FOR MASCONTROL: A MULTIAGENT SYSTEM FOR IDENTIFICATION AND CONTROL
121

implemented by other researchers, could interact
with MASCONTROL agents. Defined classes are
mainly related to control concepts, such as System,
Input, Output, ReferenceInput, Error…
A second group of classes are referred to the
implemented optimization algorithms in
Evenet2000: OptimizationMethod, TrainingMethod.
As an example, the following DAML+OIL code
defines NonLinearSystem as a subclass of System.
<daml:Class rdf:about="#NonLinearSystem">
<rdfs:subClassOf>
<daml:Class rdf:about="#System"/>
</rdfs:subClassOf>
</daml:Class>
With respect to the defined properties, these are
mainly referred to the values of defined classes:
valueOfPole, valueOfZero. On the other hand, other
properties are related to control concepts such as
order and type of a system. These definitions allow
the system to make some interesting inferences from
some axioms defined in the ontology. For example,
if a given system does not reach a desired reference
input with a proportional control action, the MAS
could deduce that the type of the system is 0. A
suitable control action for a system like that is a
proportional-integral (PI) one. Therefore, an agent
can deduce that a PI control action is a suitable
control action for a system that does not reach a
desired reference input with a proportional control
action and when this axiom does not appear
explicitly in the ontology.
6 RESULTS
With the proposed agent architecture, several
experiments related to the control of a plant have
been carried out.
6.1 Description of the plant
The plant consists of an educational module for the
control of processes. This module, shown in the
Figure 1, is from the PROCON (Process Control
Trainer) series of the Feedback Company. for the
level and flow control.
The plant consists of a closed-circuit of water that
allows the study of the principles of control
considering the water level and flow as variables to
control. The plant includes a dual tank in the top
where water level is measured. This tank is
connected to a store-tank through five manual and
three solenoid valves. Water is pumped from the
store-tank to the dual tank through a flowmeter and a
servovalve. The plant is controlled through a
standard 4-20 mA action, although for
implementation purposes the reference values (and
the outputs) are set/measured in volts. This
limitation makes more difficult the optimization of
the controller parameters, introducing a non-
derivability in the Criterion Function. This fact is
perfectly managed by the modules designed in
Evenet2000 although it can be defined a Criterion
Function that would punish those values out of the
allowed ones.
Figure 1: Plant controlled by MASCONTROL
6.2 Experiments
The experiments were carried out using three
different control actions: proportional, proportional-
integral and pole placement. The identification
process has been carried out through several IAs
acting simultaneously in the multiagent system.
These agents have used several models for the plant,
both linear and not linear. Moreover, the
identification and the optimization of the parameters
of the controller have been carried out using
simultaneously different optimization methods. With
an initial value k
p
=1, a learning phase is carried. In
this phase reference input value is continually
modified, looking for a better identification. When it
is considered that identification is good enough
(after a long time, when parameters values are
stabilized or manually through a user-interface),
reference input is set to the desired value.
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
122
In the following sub-subsections the authors will
analyze the results related to the PI and pole
placement control actions.
6.2.1 PI Control Action
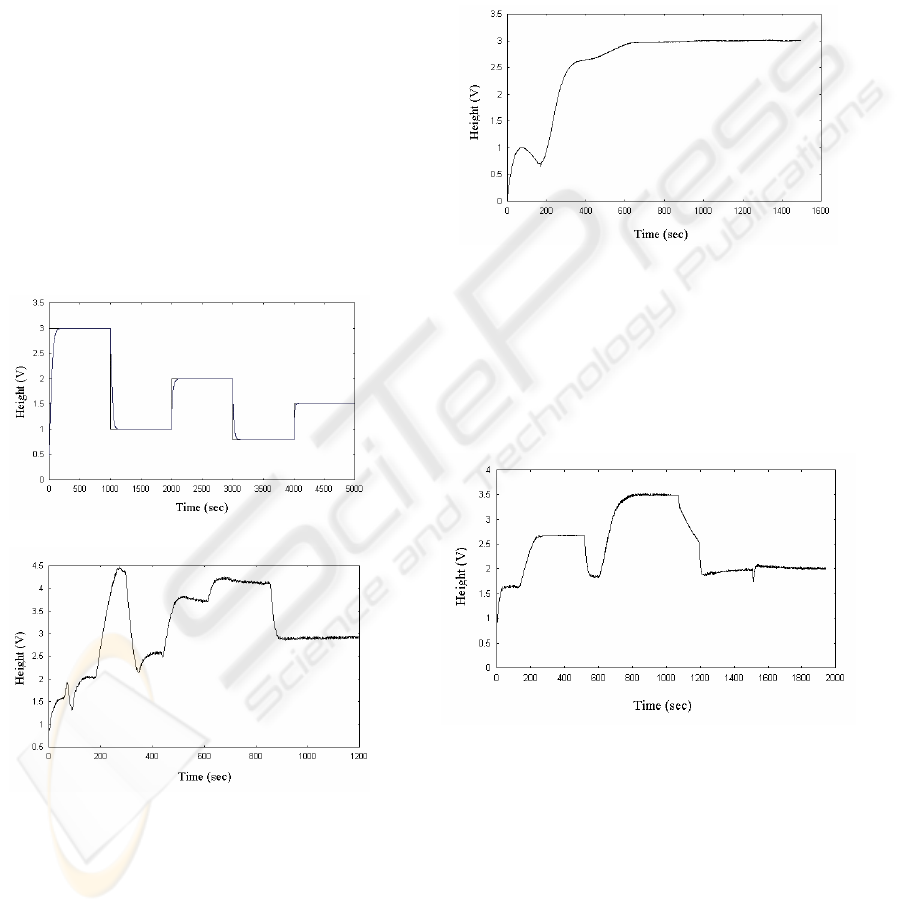
Figure 2 shows the optimization carried out by the
OpAs. with a variable reference (3, 1, 2, 0.8 and 1.5
V.). In this sense, with this type of sequence
(increasing/decreasing), the model behaviour is
supposed to be more independent from a given
reference input.
In this case, it can be seen that the system output
reaches the reference input in each section, without
overshoot. This optimization is reflected in the
system output: it reaches the desired reference inputs
(2.5, 3.7, 4 and 3 V) and with a low overshoot. The
two mentioned phases (training and desired
reference input) can be distinguished (see Figure 3).
Moreover, the measured constant time (150 seconds
aprox.) is of the same order as the measured one.
This fact is considered to be a validation of the
MAS.
Figure 2: Optimization result obtained by the OpAs
Figure 3: Results obtained using PI action control
The following experiment illustrates the use of an
OA, and ontologies in general, in a control system.
Figure 3 shows the output evolution initially
controlled by a proportional control action. When
the IOAA realizes that the system output is
stabilized and that it has not reached the reference
input, the RCA asks the OA for the suitable control
action when a system does not reach a reference
input using a proportional action. At this point, the
OA looks for this fact in the system ontology and
informs the RCA that the answer is a proportional-
integral control action. Then, MASCONTROL
makes the necessary modifications (control action
and model). As it was expected, the process output
reaches the desired reference input after these
modifications. This fact is only an example of the
power that ontologies are able to supply to a process
control system.
Figure 4: Ontology Effect: P to PI control action
6.2.2 Pole replacement control action
The following work focuses on studying that
goodness for a totally different control action, in
particular, pole replacement. This control action
depends critically on system identification.
Figure 5: Pole replacement control action
Due to MASCONTROL modularity, some minor
modifications are necessary. Firstly, the RCA should
implement this new control action. Secondly,
controller parameter set optimization has no sense
for this control action. Therefore, the CCA is only
limited to propagate CIA results. Figure 5 shows the
obtained results. In this case, as it can be seen, the
system identification (with proportional-integral
control action) phase has been longer, looking for a
better identification.
LOOKING FOR MASCONTROL: A MULTIAGENT SYSTEM FOR IDENTIFICATION AND CONTROL
123

7 CONCLUSIONS
The development of a MAS architecture for process
control is presented in this paper. In particular this
MAS, called MASCONTROL implements a self-
tuning regulator (STR) scheme. It is another
alternative to solve problems of process control.
This MAS has adopted FIPA specifications because
they have become a stronger standard in MAS
development and it involves not only agent language
specifications but also agent management and
conversations.
In this work, an Ontology Agent (OA) is included.
An OA is an agent that provides access to one or
more ontology servers and which provide ontology
services to an agent community. For ontology
design, DAML+OIL is a sufficiently expressive
language for carrying out this work. Apart from the
standard tools, the authors have included
Evenet2000. This toolkit has been shown to be
highly useful in control problems.
The authors strongly recommend the use of MAS
and ontologies in order to develop applications such
as those analyzed in this paper. The results that are
reported in this paper indicete good future
possibilities. They expect to have shown that its use
offers more than they cost.
REFERENCES
Aström K.J. and Wittenmark B., 1995, Adaptive Control -
Second Edition. Addison-Wesley (ISBN 0-201-55866-
1).
Cockburn D. and Jennings. N.R., 1996, ARCHON: A
Distributed Artificial Intelligence System for Industrial
Applications. In Foundations of Distributed Artificial
Intelligence, G. M. P. O'Hare and N. R. Jennings,
editors.
Falasconi S., Lanzola G., Stefanelli M., 1996, Using
ontologies in Multi-Agent Systems. Tenth Knowledge
Acquisition for Knowledge-Based Systems Workshop,
1996
Faratin P.; Jennings N.R.; Buckle P. and Sierra C., 2000.
Automated Negotiation for Provisioning Virtual
Private Networks using FIPA-Compliant Agents. Proc.
5th Int. Conf. on the Pratcical Application of
Intelligent Agents and Multi- Agent Systems (PAAM-
2000), Manchester, UK, 185-202
Fonseca S.P., Griss M.L., Letsinger R. Agent Behavior
Architectures. A MAS Framework Comparison.
Proceedings of the first international joint conference
on Autonomous agents and multiagent systems,
Bologna, Italy, 2002.
González E.J. , Hamilton A., Moreno L., Marichal R.L.,
Muñoz V., 2004, MASCONTROL: A MAS for System
Identification and Process Control, 8th Pacific Rim
International Conference on Artificial Intelligence,
Auckland, New Zealand, August 9-13.
Gonzalez E.J., Hamilton A., Moreno L., Aguilar R.M.,
Marichal R.L., 2003, Neural networks teaching using
Evenet-2000. Computer Applications in Engineering
Education. Volume 11, Issue 1, 1-5.
Gonzalez E.J., Hamilton A., Moreno L., Sigut J., Marichal
R.L., 2001, Evenet-2000: Designing and Training
Arbitrary Neural Networks in Java. Bio-Inspired
Applications of Conectionism. Springer-Verlag (2085)
104-110. 2001.
González E.J., Marichal R.L., Hamilton A.F., Moreno L.,
2003, Evenet2000 as Software Application for System
Identification and Control. The 11th Mediterranean
Conference on Control and Automation. Rhodes.
Greece.
Seilonen I., Appelqvist P., Vainio M., Halme A.and
Koskinen K., 2002, A Concept of an Agent-Augmented
Process Automation System. 15th IFAC World
Congress on Automatic Control, Barcelona, Spain.
Söderström T., Stoica P., 1989, System Identification.
Prentice Hall International Series in Systems and
Control Engineering.
Velasco J., González J.C., Magdalena L. and Iglesias C.,
1996, Multiagent-based Control Systems: a Hybrid
Approach to Distributed Process. Control Engineering
Practice. Vol. 4 839-846.
Warwick K., 1989, Control Systems: An Introduction.
Prentice Hall International Series in Systems and
Control Engineering.
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
124
