
MILITARY VEHICLE TYPE CLASSIFICATION
Intelligent Control Systems and Optimization
Jerzy Jackowski
Military University of Technology, Institute of Mechanical Vehicles, Warsaw Poland
Keywords: Process of identification, acoustic signals, neural network.
Abstract: This work presents the results of the measurement of the noise generated by vehicles differentiated in
respect of the vehicle weight and structure. The analysis of registered acoustic signals was carried out on the
basis of their frequency representation. Based on the Student difference test, a series of parameters of
determined spectral signal power densities were examined for their usefulness for a differentiating feature
vector. A process of qualifying a registered signal of a detected object to a proper class can be realized by
various methods. Most often it is carried out on the basis of the object feature vector position against
surfaces separating it from the vectors of other objects in the multidimensional space of features. Meeting
the requirement of maximum classifier structure simplification, searching for the best separating plane was
limited to the neuron network method based on the Rosenblatt perceptron education. Specification of
measurement results indicates that there is a high probability of correct recognition of acoustic signals
generated by the wheel and caterpillar vehicle motion.
1 INTRODUCTION
Advanced vehicle identification systems, included in
the equipment of some modern armies, consist of a
whole network of sensors that can be located by
special forces, helicopters or artilleries, deep inside
the enemy’s territory or near possible army
manoeuvre routes. These systems use signals
registered by seismic, acoustic, magnetic and optical
sensors (Military Technology, 2000; Hewish, 2001).
Identification of a moving vehicle on the basis of its
external interaction requires an indication of
characteristic features of registered signals generated
by the motion e.g. of particular groups of vehicles.
In general, four decision-making processes can
be indicated in the algorithm of the vehicle
identification system operation:
1 – vehicle presence detection,
2 – signal registration,
3 – vehicle detection,
4 – working out a decision “what to do?”, e.g.
activate the means of destruction in order to destroy
a detected and identified vehicle.
In (Jackowski, Jakubowski, 2002; Kwiatkowski,
2001; Jackowski, Wantoch-Rekowski, 2004) the
authors presented the results of the works related to
the classification of appropriate seismic signals and
the recognition of appropriate vehicles based on that
method. This work pays attention to the evaluation
of possibilities of using acoustic interactions in the
vehicle recognition process.
A process of qualifying a registered signal of a
detected object to an appropriate class can be
realized by various methods. Most often it is carried
out on the basis of the object feature vector position
against surfaces separating it from the vectors of
other objects in the multidimensional space of
features. These surfaces, also called hyperplanes,
can be found using artificial neuron networks.
Proper selection of a features space makes the initial
stage. As a rule, their determination is based on
knows physical properties and endeavours leading to
omission of features that assume values close to all
other objects during identification.
2 CLASSIFICATION PROCESS
FOR ACOUSTIC SIGNALS
RESULTING FROM A VEHICLE
MOTION
The main objective of the research, presented in this
work, is to develop a method for processing acoustic
signals resulting from a motion of selected types of
military vehicles: wheeled and tracked ones. These
307
Jackowski J. (2005).
MILITARY VEHICLE TYPE CLASSIFICATION - Intelligent Control Systems and Optimization.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 307-310
Copyright
c
SciTePress

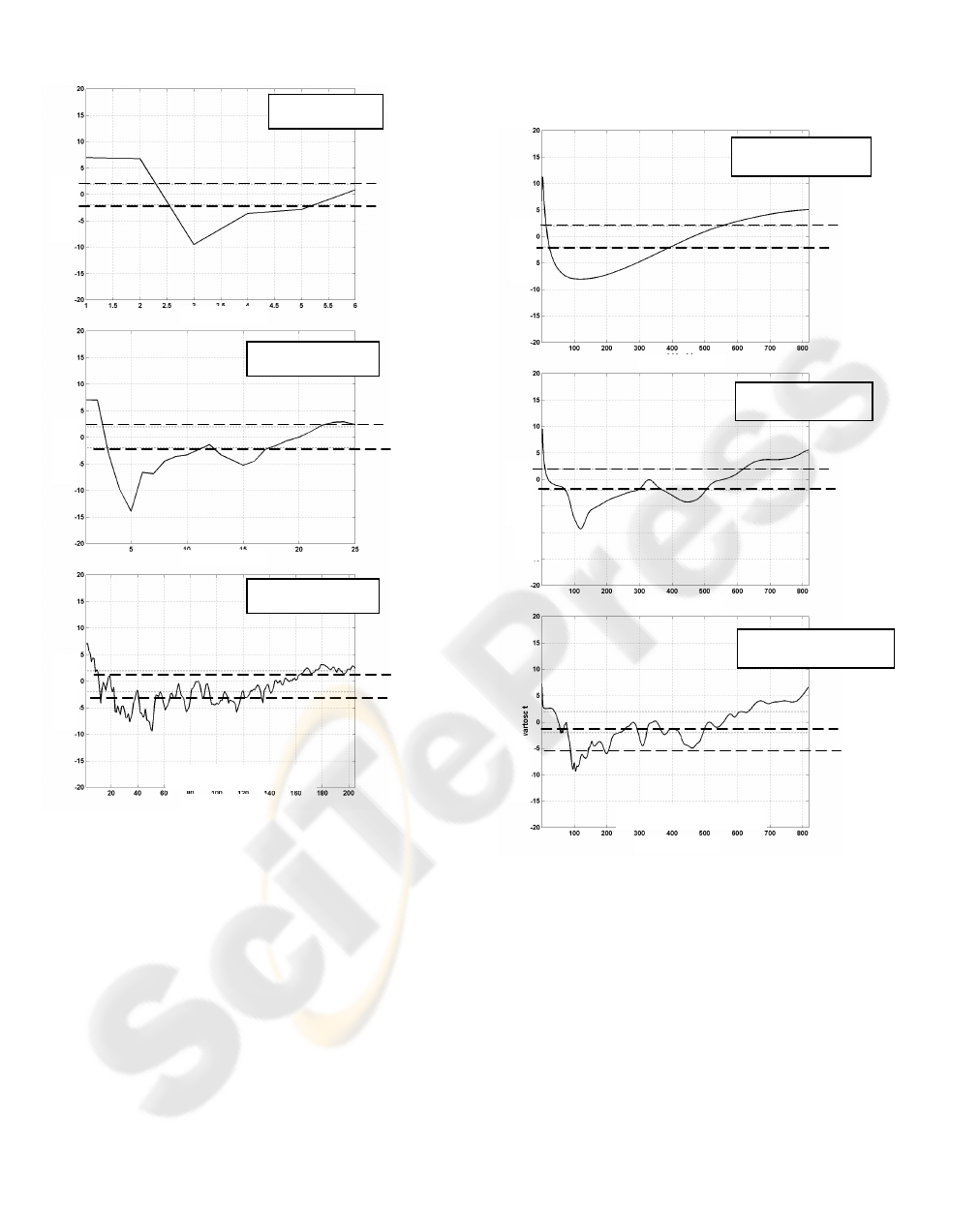
Presented diagrams indicate that there is an optimum
segment length corresponding to the examined
differentiation.
Figure 1: Results of the search for optimum segment
length for the Welch procedure of the spectral noise signal
analysis conditioning the best differentiation between
tracked and wheeled vehicles (spectrum sample ranges
presented on each of the above figures correspond to the
frequency range 0÷1000Hz)
Short segment e.g. length of 64, allowed for
obtaining maximum value of |t| which equals app. 9.
Such segment offers a low resolution and therefore
the spectra of two categories are very close to each
other. Similar value of |t|, at the level of 8-9, is
characteristic for the spectrum determined using a
long segment e.g. 2048. But in that case the
spectrum resolution is high and the low value of |t|
most likely results from differences in estimated
spectra of signals occurring in the same category.
However higher values of |t|, amounting to app. 13-
14, were obtained for medium segment lengths i.e.
256. In order to find the best, from the examined
differentiation point of view, forms of power
densities, an alternative solution has been also used
- i.e. parametrical determining method, and the tests
were carried out for LPC model orders equal to 10,
50 and 150.
Figure 2: Results of the search for optimum LPC model
order for parametric spectral analysis of noise signals
conditioning the best differentiation between wheeled and
tracked vehicles (spectrum sample ranges displayed on
each of the above figures correspond to the frequency
range 0÷1000Hz)
This method allows for overcoming the
limitations of a compromise between the resolution
ability and the variance of estimation done by the
Welch method. Obtained diagrams of t statistics are
presented in figure 2.
Presented courses can be characterized by a
higher resolution at preserved maximum of |t|,
compared to the Welch method. Finally, when
selecting a method for spectral power density
definition, a parametric method at the model order
N
LPC
=10
N
LPC
=50
N
LPC
=150
NFFT=64
NFFT=256
NFFT=2048
s
p
ectrum sam
p
le no.
s
p
ectrum sam
p
le no.
t
t
t
t
t
t
t
t
MILITARY VEHICLE TYPE CLASSIFICATION - Intelligent Control Systems and Optimization
309

