
D
YNAMIC HYSTERESIS MODEL DERIVATED FROM LuGre
MODEL
Sinuhe Benitez
CITEDI-IPN
2498 Roll Dr. 757 Otay Mesa San Diego, California, 92154 USA
Leonardo Acho and Ricardo Guerra
CITEDI-IPN
2498 Roll Dr. 757 Otay Mesa San Diego, California, 92154 USA
Keywords:
Hysteresis, Dynamic Model, Friction.
Abstract:
This paper presents a dynamic hysteresis model; which is a modification of the well known LuGre model. This
model has been based on a modification to the LuGre model dynamic, which could be seen as a forward and
backward displacement in the steady state solution of the dynamic LuGre model. The LuGre friction model
is based on the average deflection of the bristles; implicitly, it is based on the relationship between stress and
strain of the bristles under deformation. From the friction model point of view, this dynamic hysteresis model
can capture the deformation behaviour between stress and strain beyond the elasticity region for the material
(the bristles), a region where the relationship between stress and strain is no longer linear. So, our model can
capture the friction phenomena of the original LuGre model and presents a new behaviour in the pre-sliding
regime. Simulation results are presented to support our contribution.
1 INTRODUCTION
While working in mechanical applications, it is im-
portant to have an accurate model of the system in
question. One of the more important considerations
that must be taken into account in any mechanical sys-
tem is the friction phenomenon. Many attempts have
been made to reproduce the effects caused by friction,
which is a non-linear effect. The importance of mod-
eling friction lies in the simple fact that all mechani-
cal systems present this phenomenon, moreover, be-
ing that it has non-linear behaviour, linear controllers
have very poor performance when trying to overcome
friction.
The first attempts made to model friction were sta-
tic models, such as the Coulomb model and the Vis-
cous friction model. The performance of these mod-
els was surpassed by the Dahl friction model (Dahl,
1968) and, more recently the LuGre friction model
published by Carlos Canudas et al. (C. Canudas de
Wit, 1995), which is at present one of the more widely
used models for friction compensation. It has the
ability to reproduce behaviours such as stick-slip mo-
tion, limit cycles, pre-sliding displacement and vary-
ing break away force. The basis for this model is an
abstraction that supposes the existence of microscopic
bristles on the surfaces in contact where friction is
present, these bristles are elastic and hence present
deformation which is captured in the model by the
introduction of an internal state which represents the
average deflection of said bristles. The interactions
between the bristles are responsible for the effects col-
lectively referred to as the friction phenomenon.
Research has been carried out to extend the LuGre
model but it relies on the usage of memory stacks
to reproduce the hysteresis phenomenon (J. Swevers,
2000). The main disadvantage of this approach is that
the hysteresis behaviour is modeled by a static func-
tion.
All the friction models presented recreate the elastic
behaviours of contact surfaces and the breakaway be-
haviours, but there is no model that can reproduce the
effects that occur between the elastic region and the
breakaway region, such as the segment of the stress-
strain curve (Young’s modulus and Hooke’s law) that
corresponds to non-elastic deformation region.
This paper presents a new dynamic hysteresis model
derived from the LuGre model. The inclusion of
the hysteresis friction model within the LuGre fric-
tion model yields results that approximate physical
closer to the reality than the previous models. The
new model shows a flat segment at the corners of the
pre-sliding displacement behaviour, produced by the
non-elastic deformation shown in Young’s modulus.
179
Benitez S., Acho L. and Guerra R. (2005).
DYNAMIC HYSTERESIS MODEL DERIVATED FROM LuGre MODEL.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 179-183
DOI: 10.5220/0001156201790183
Copyright
c
SciTePress
The paper is structured as follows: Section II reviews
the LuGre friction model, Section III presents the
Hysteresis model, Section IV shows the numeric sim-
ulation results, finally, the conclusions are given in
Section V.
2 THE LUGRE MODEL
The LuGre model consists of an internal state, which
is used to produce friction force, (C. Canudas de Wit,
1995), this model is as follow.
˙z = v −
|v|
g(v)
z (1)
f = σ
0
z + σ
1
˙z + σ
2
v (2)
g(v) = (F
C
+ (F
S
− F
C
e
−(v/v
S
)
2
))/σ
0
(3)
where z is the state, v is the relative velocity between
surfaces, g(v) a function that models the constant ve-
locity behaviour, σ
0
an equivalent stiffness for the
position-force relationship at velocity reversal, σ
1
the
micro-viscous friction coefficient, and σ
2
the viscous
friction coefficient. F
C
and F
S
are the Coulomb fric-
tion level and the level of stiction, respectively.
This model can capture most of the known friction
behaviours like pre-sliding displacement, friction lag,
varying breakaway force and stick-slip motion, and
limit cycles, (C. Canudas de Wit, 1995).
Table 1: Parameters values used in all simulations.
Parameters Values Unit
σ
o
s 10
5
[N/m]
σ
1
√
10
5
[N–S/m]
σ
2
0.4 [N–S/m]
F
C
1 [N]
F
S
1.5 [N]
v
S
0.001 [m/s]
2.1 Pre-sliding effect
If a force is applied to a pair of surfaces in contact
there will be a displacement. A simulation was per-
formed in (C. Canudas de Wit, 1995), with an applied
force slowly ramped up to 1.425 N which is 95% of
F
s
. The force was then kept constant for a while and
later ramped down to -1.425 N, where it was kept con-
stant and then ramped up to 1.425 N again. The re-
sults of the simulation are shown in (Fig. 1), this be-
haviour agrees qualitatively with the experiment re-
sults in (J. Courtney-Pratt, 1957).
Figure 1: Pre-sliding displacement.
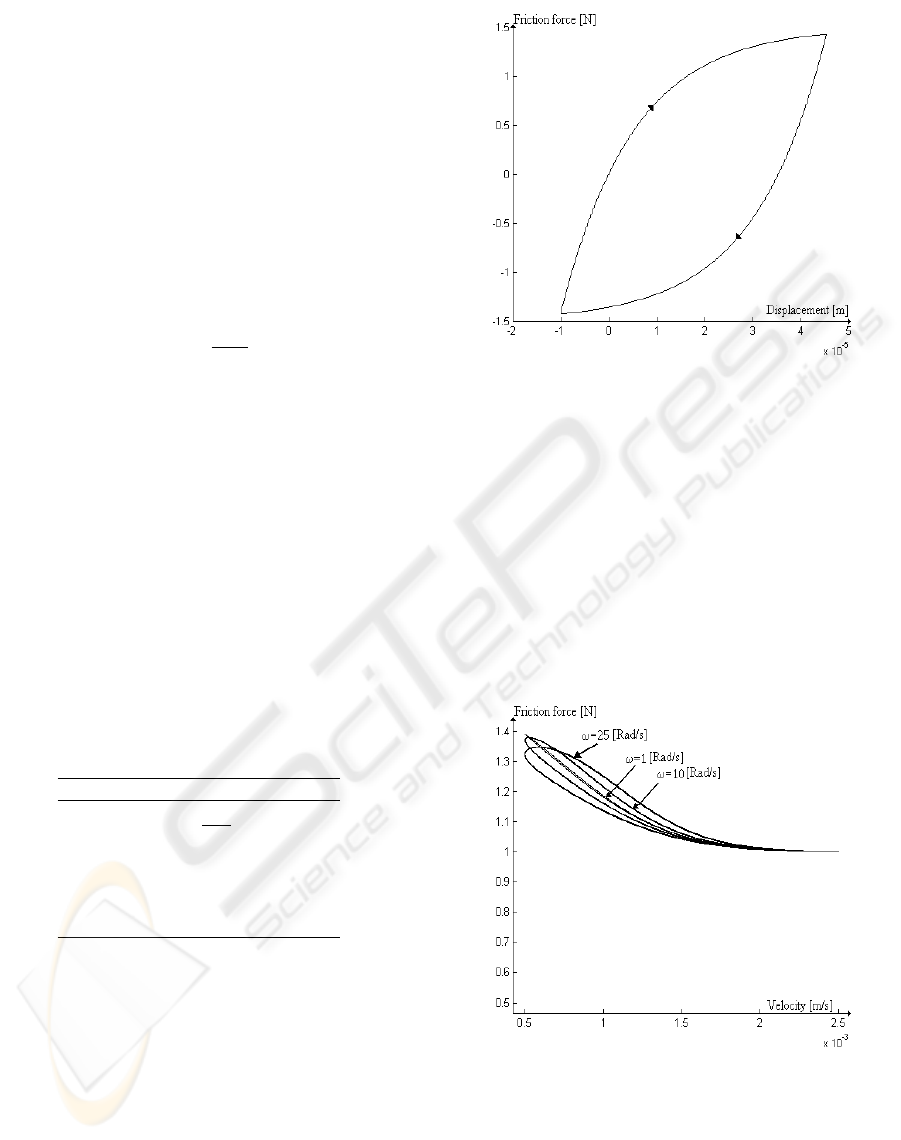
2.2 Friction Lag
Hysteresis behaviour in the relationship between fric-
tion and velocity was shown by Hess and Soom
(D.P. Hess, 1990) while they were studying the dy-
namic behaviour of friction when velocity is varied
during unidirectional motion. While friction force is
lower for decreasing velocities than for increasing ve-
locities, the hysteresis loop becomes wider at higher
rates of velocity change. The LuGre model can cap-
ture this effect as is shown in (Fig. 2).
Figure 2: Friction Lag
2.3 Breakaway Force
The breakaway force can be investigated through ex-
periments with stick-slip motion. In (C. Canudas de
Wit, 1995) simulations were performed using the dy-
namic model, where a force was applied to a unit mass
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
180
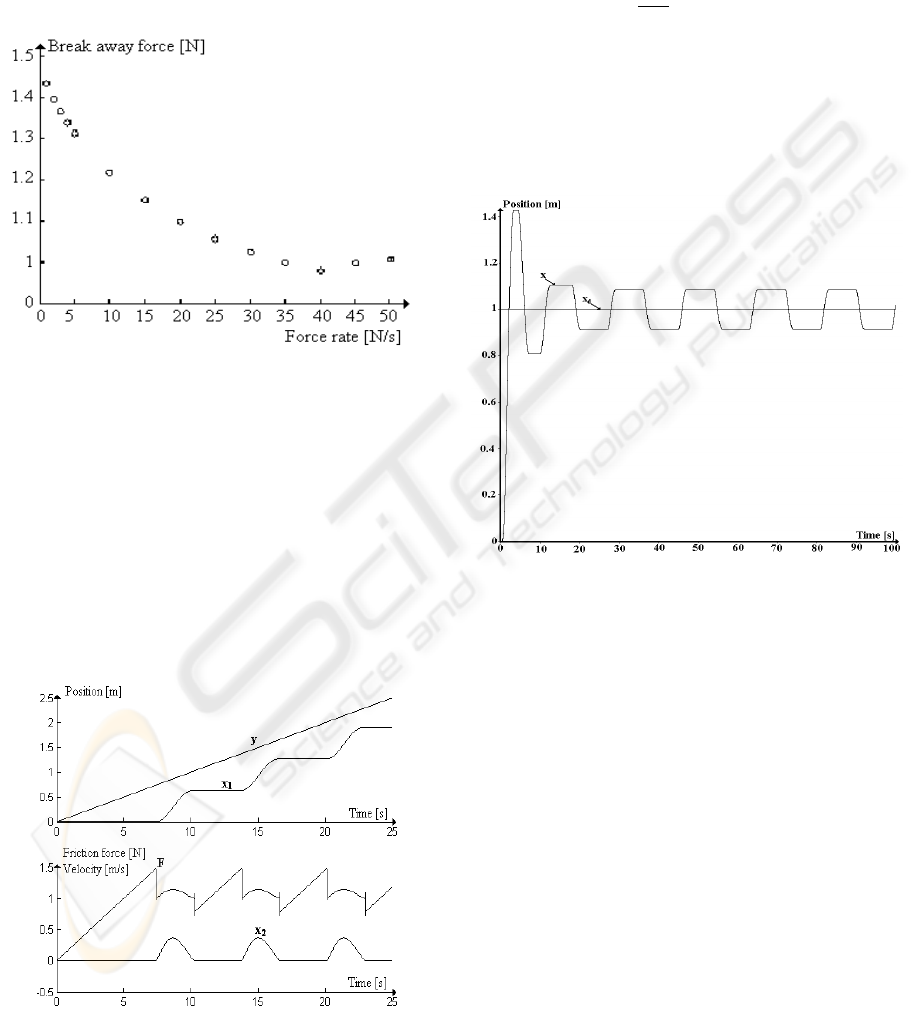
and ramped up at different rates, and the friction force
when the mass started to slide was determined. The
Breakaway force was therefore determined at the time
where a sharp increase in the velocity could be ob-
served, (Fig. 3) shows the force at breakaway as a
function of the rate of increase of the applied force.
Figure 3: Breakaway Force
2.4 Stick-Slip Motion
Stick-slip motion is a typical behaviour for systems
with friction. It is caused by the fact that friction is
larger at rest than during motion. In (C. Canudas de
Wit, 1995) the author used in his experiments a unit
mass attached to a spring with stiffness k = 2N/m,
and a constant velocity dy/dt = 0.1m/s, experimen-
tal results are shown in (Fig. 4).
Figure 4: Stick-Slip motion
2.5 Limit Cycle Cause by Friction
Limit cycles are another phenomenon produce by
friction, this behaviour is shown in (C. Canudas de
Wit, 1995) applying a friction force to a unit mass
m
d
2
x
dt
2
= u − F (4)
with F as a friction force given by (Eq. 2), and u as
control force given by a PID controller
u = −k
v
v − K
p
(x − xd) −K
i
Z
(x − xd) (5)
simulation results are shown in (Fig. 5)
Figure 5: Limit cycle
In (C. Canudas de Wit, 1995) it has been proven that
the LuGre model can capture almost all the effects
caused by friction, but still some phenomena are miss-
ing for instance, what happens when a bristle is out
of the elastic region but not yet in the breakaway re-
gion, i.e. when it is in the non-elastic deformation
region, such kind of phenomena are not captured by
LuGre model, here the motivation is to improve this
dynamic friction model in order to be able to capture
more phenomena produced by friction.
3 HYSTERESIS MODEL
Some papers have been published improving the
pre-sliding behaviour adding to the friction equation
(Eq. 1) a static hysteresis friction force, see (J. Sw-
evers, 2000) (C. Ganseman, 1997), which is a static
function, these improvements can reproduce all the
effects shown by the LuGre model.
But neither the LuGre model nor its improvement
DYNAMIC HYSTERESIS MODEL DERIVATED FROM LuGre MODEL
181
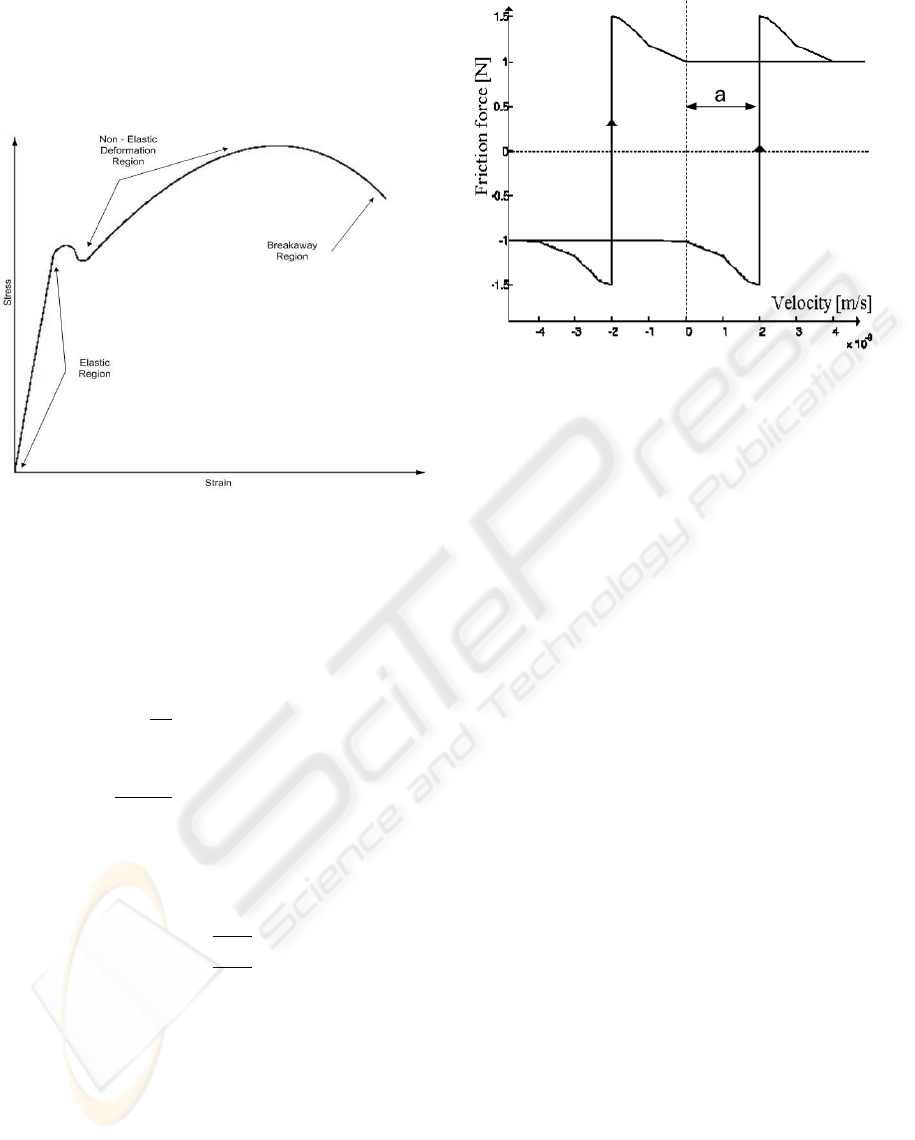
(J. Swevers, 2000) can reproduce the pre-sliding
displacement in the non-elastic deformation region
shown on the stress-strain curve of Young’s modulus
(F. W. Sears, 1957) (Fig. 6).
Figure 6: Stress-Strain Curve.
The dynamic hysteresis friction model proposed is
derived from the forward and backward displacement
of the steady state solution of the LuGre friction
model. The steady-state solution is (C. Canudas de
Wit, 1995).
z
ss
=
v
|v|
g(v) = g(v)sgn(v) (6)
If we add a displacement a, we get
z
ss
=
v ± a
|v ± a|
g(v) = g(v)sgn(v ± a) (7)
After this displacement, represented by the parameter
a, it is possible to obtain the behaviour shown in (Fig.
7)
˙z =
(
(v + a) −
|v + a|
g (v)
z ˙v > 0
(v − a) −
|v −a|
g (v)
z ˙v < 0
(8)
with a as the displacement factor that can be a con-
stant or could be a function of the state variable z,
where a, in some way has a relation with the non-
elastic deformation width (non-elastic deformation
region Fig. 6), this region is located between the elas-
ticity and breakaway regions of the stress-strain curve
(Fig. 6), with this forward and backward displace-
ment it is possible to see the deformation segment of
the stress-strain curve, and reproduce all the friction
effects reproduced by the LuGre model.
This improvement comes as it was mentioned, from
the steady state solution of (Eq. 1)
Figure 7: Hysteresis Behavior.
4 NUMERICAL SIMULATION
In order to show the validity of this model, simula-
tions were run on Matlab version 6.0 and the results
are shown in the following figures. The same para-
meters used in (C. Canudas de Wit, 1995) were used
in these simulations, where it was found that pro-
posed model can capture the same phenomena that
LuGre, such as Frictional lag, varying Breakaway
force, Stick-slip motion, and limit cycles, but a new
phenomenon was found in the pre-sliding regime,
which is assumed to be the non-elastic deformation
of the bristles while a force is applied before entering
the rupture zone where the displacement starts.
Figure (8) shows the pre-sliding displacement for
the model considering that a is a constant value of
0.000002
Figure (9) shows the friction force in the pre-sliding
regime behaviour plotted against displacement, for
the model considering that a is a minimum function
between a constant value of 2 × 10
−6
and the norm
of the internal state z; i.e., a = min{2 × 10
−6
, kzk}.
It is possible to see a high correlation between (Fig.
9) and (J. Swevers, 2000, Fig. 10), which is an exper-
imental result of displacement-torque curve from the
first axis of the KUKA IR 361 robot, the non-elastic
deformation region can be seen in both figures.
Figure (10) shows the friction force in the pre-sliding
regime behaviour plotted against displacement, for
the model considering that a is a maximum function
between a constant value of 2×10
−6
and the norm of
the internal state z;i.e., a = max{2 × 10
−6
, kzk}.
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
182
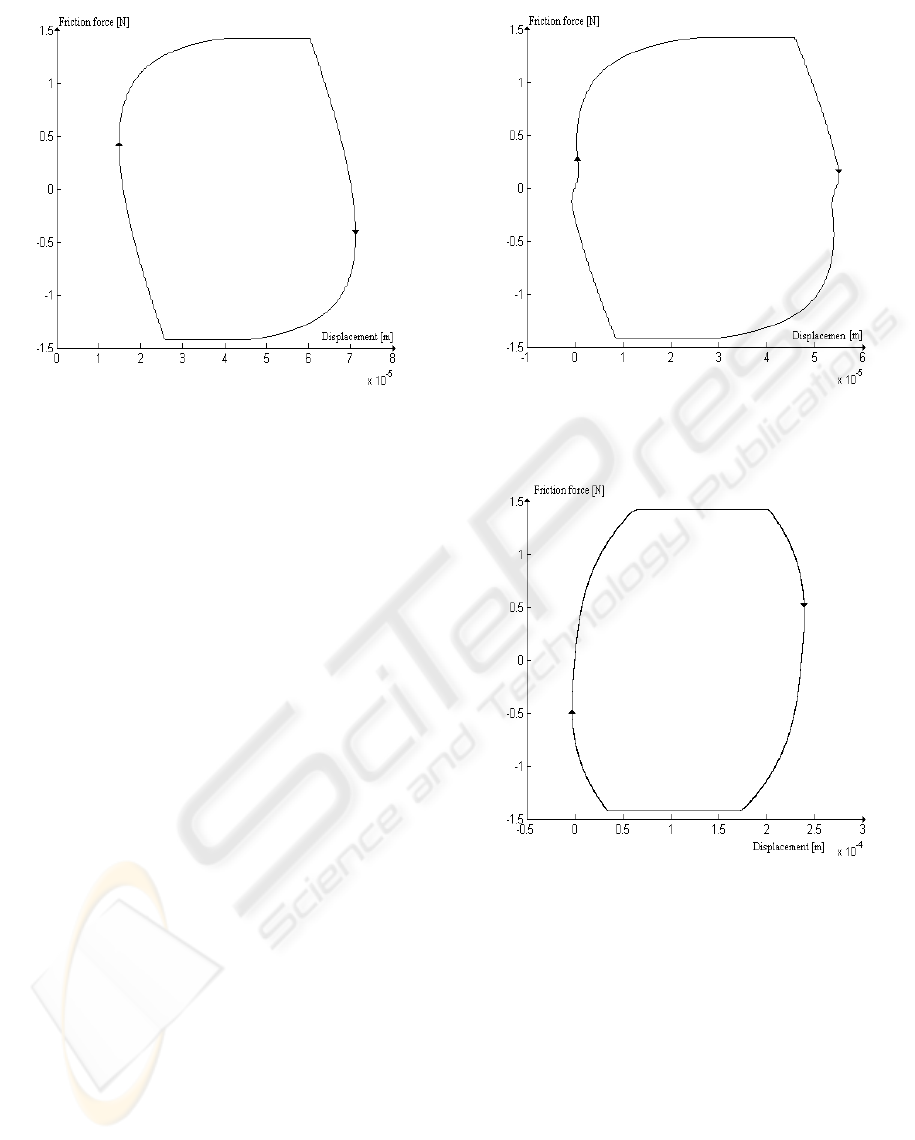
Figure 8: Pre-Sliding displacement.
5 CONCLUSION
A dynamic hysteresis friction model was presented
which is valid in both the sliding and pre-sliding
regimes. The system is able to accurately capture fric-
tion characteristics, experimentally obtained such as:
Stribeck effect during sliding, hysteresis behaviour in
pre-sliding, frictional lag, varying breakaway force,
and stick-slip behaviour, as well as limit cycles. It
is concluded that the developed dynamic hysteresis
friction model can capture any friction behaviour de-
scribed in the literature or experimentally observed,
but the main improvement with respect to the LuGre
model is that the new model can even capture non-
elastic deformation, a phenomenon not captured by
any dynamic friction model to our knowledge. It is
for these reasons that we consider that this model will
be of great use, particularly in mechanical applica-
tions such as system modeling and control by friction
compensation; all though, future work is needed to
achieve implementation in the afore mentioned areas.
REFERENCES
C. Canudas de Wit, H. Olsson, K. A. P. L. (1995). A new
model for control of system with friction. IEEE Trans.
on Automatic Control, (3):419–425.
C. Ganseman, J. Swevers, T. P. F. A. B. (1997). An in-
tegrated friction model with improved presliding be-
havior. In Proc. Symp. Robot Control, pages 221–226,
Nates, France.
Dahl, P. (1968). A solid friction model. Technical Report
TOR-0158(3107-18)-1,1968, Aerospace Corp.
Figure 9: Pre-Sliding displacement.
Figure 10: Pre-sliding displacement.
D.P. Hess, A. S. (1990). Friction at a lubricated line contact
operating at oscillating sliding velocities. J. Tribology,
pages 147–152.
F. W. Sears, M. W. Zemansky, H. D. Y. R. A. F. (1957).
Fisica Universitaria. Addison Wesley Longman,
Mexico, 10th edition.
J. Courtney-Pratt, E. E. (1957). The effect of a tangential
force on the contact of metallic bodies. In Proc. Royal
Society, pages 529–550, Nates, France.
J. Swevers, F Al-Bender, C. G. G. T. P. (2000). An inte-
grated friction model structure with improved preslid-
ing behavior for accurate friction compensation. IEEE
Trans. on Automatic Control, (4):675–686.
DYNAMIC HYSTERESIS MODEL DERIVATED FROM LuGre MODEL
183
